L波段高空探测系统的时差及其测量不确定度
2021-11-02 01:36梁静舒王海深胡姮
气象科技 2021年5期
梁静舒 王海深 胡姮
(中国气象局气象探测中心,北京 100081)
引言
高空气象观测是气象业务的基础之一,是天气预报、气候分析、科学研究和国际交换气象情报和资料的主要来源[1]。L波段高空探测系统是高空气象观测的重要组成部分,也是我国自主研制的新一代探空系统。该系统由数字探空仪和二次测风雷达构成,具有探测精度高、采样速率快、使用方便等特点,实现了高空气象探测仪器的数字化和自动化[2-3]。试验结果表明,L波段高空探测系统较59-701高空探测系统所测的温度、高度资料更稳定、离散率更小,对提高预报准确率有利[2];在温度较低的对流层上层,GTS1型电子探空仪测定的湿度数据较59型探空仪更加精确[3]。
L波段高空探测系统虽然具有很多优越性, 但在探测精度方面仍有一定局限性,尤其是在气压和高度方面[4-5]。研究表明,L波段电子探空仪气压值一直较RS92型探空仪偏低,系统差绝对值在低层要高于高层[6];L波段高空探测系统所反映出的测高偏差随探测高度的增加而不断变大;L波段雷达和GTS1型探空仪测量高度差值随探空仪的升高而逐渐增大[5];还有研究对L波段高空探测系统的测风算法提出了改进方法[7-8]。
探空仪需要在运动状态中测量气象要素,若地面计算机软件赋予探空仪测量要素的时间与测量元件感应的时间不一致,其测量结果就无法正确地反映气象要素的实际变化,并由此造成测量误差。
分析L波段GTS1型探空仪和地面数据处理软件的时序安排发现,探空仪和地面数据处理软件都有测量与赋时不同步的问题,该问题也通过GTS1型探空仪与芬兰RS92型探空仪的同球比对施放试验得到了证明。通过进一步分析计算确认,L波段雷达高空探测系统由于测量与赋时不同步造成的气象要素测量结果不确定度是不可忽视的,亟需改进探空仪及其数据处理软件。针对北斗-GPS双模式探空测风系统设计,本文提出了该问题的改进方法。
1 L波段高空探测系统的时序设计
L波段高空探测系统的时序设计包括探空仪和探空数据处理软件两部分,下面分别对上述两部分的时序设计进行分析。
1.1 探空仪
探空仪的时序设计,主要考虑探测敏感元件感应气象要素的时间与发射机发出的时间之间是否有时间差。目前业务应用的L波段探空仪主要是GTS1型探空仪,厂方发布的电路图如图1所示。
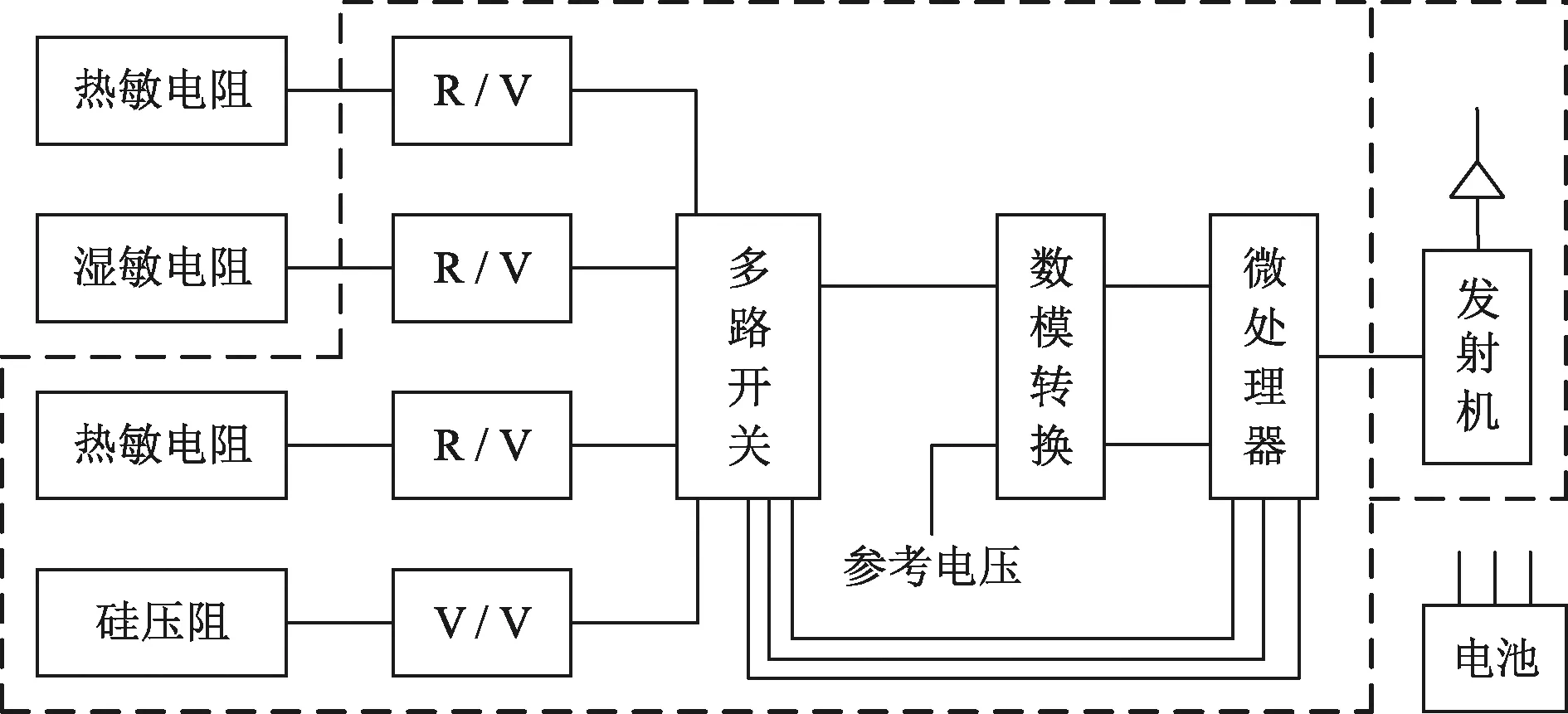
图1 GTS1型电子探空仪的电路原理
可以看出,4个测量元件经三路电阻-电压转换,一路电压-电压转换,再经“多路开关”的排序进入“模数转换”,将电压信号变为数字信号,然后进入“微处理器”(即单片计算机),显然采用的是串行体制,必须经过一段时间才能将四路气象信号传入微处理器。此后在微处理器中设置了1个“更新单元”,即1个数据储存器,探空仪测量电路的输出,周期性地推向这个储存器,使储存器中的数据始终是最新的一组。GTS1型探空仪更新单元的更新周期为1.2 s。
探空仪的信号发射由单片计算机的程序控制,其时间分配为0.2 s发送气象数据,0.8 s用于雷达测距,1 s为1个重复周期。在发送气象数据时从“更新单元”中取出气象数据,以发射机的调制信号发出。
由于气象数据的“更新单元”1.2 s更新1次。而取出数据发射的时刻,由单片计算机软件给出的时标确定,为1 s 1次。这样,在不考虑测量传感器本身滞后的情况下,探空仪这种时序安排就使得气象要素的感应时间与实际发出的时间之间产生了在0~1.2 s变化的时间差。
1.2 数据处理软件
L波段雷达探测系统的数据处理软件在时序安排上,采用了探空仪的做法,同样设计了一个“更新单元”,其更新周期同样为1.2 s。L波段软件从气象信号的接收到赋时的基本流程是:探空信号由接收机接收、变换后输入探空仪厂家提供的“软件包”(即解码单元)变为气象信号,然后存入“更新单元”等待读取。数据处理计算机产生连续不断的秒间隔信号,到“更新单元”中去取气象数据,取来后赋予计算机的时间,分辨力为1 s。
地面软件的设计采用了与探空仪相同的方式。不论软件是否读取数据,气象数据在“更新单元”中每间隔1.2 s更新1次,与读取的时间无关。这样,显然又造成了在0~1.2 s变化的时间差。
由于更新单元为1.2 s更新1次,数据处理软件1秒取1次数据,这就不可避免地会出现在1个周期内取2次相等数据的情况,由于只有0.2 s之差,发生这种情况的概率并不大。但在探空信号受到干扰,每组的标志码不能检出时,“更新单元”中的数据就不会变化了。这就是业务探空中,气象要素曲线出现直线(不变)的原因。


2 时差所致探空测量结果随机变化
由于探空仪敏感元件感应气象参数的时间与赋予的时间之间存在误差,而该时差在0~2.4 s之间随机变化,必然引起探测数据的起伏。在业务探测时,因为没有标准值,这种情况很容易被忽略。
2013年12月,中国气象局在广东阳江进行了北斗-GPS双模式导航测风探空仪与芬兰RS92型探空仪的比对试验,业务L波段雷达-GTS1型电子探空仪探测系统也参加了试验。采用同球施放的方法得到了2种探空系统之间的比对试验结果。
以RS92型探空系统的测量结果作为参考标准值,计算L波段雷达探测系统所测温度、气压和湿度的误差。为便于分析和研究,将L波段探测系统探空仪测量至软件赋时的时间差造成数据随机波动的情况放大,只取每次施放从地面至升空后90 s的比对结果,制作L波段高空探测系统与RS92型探测系统间的误差曲线分布。同球施放共40次,温度、气压和湿度的误差分布如图2所示。
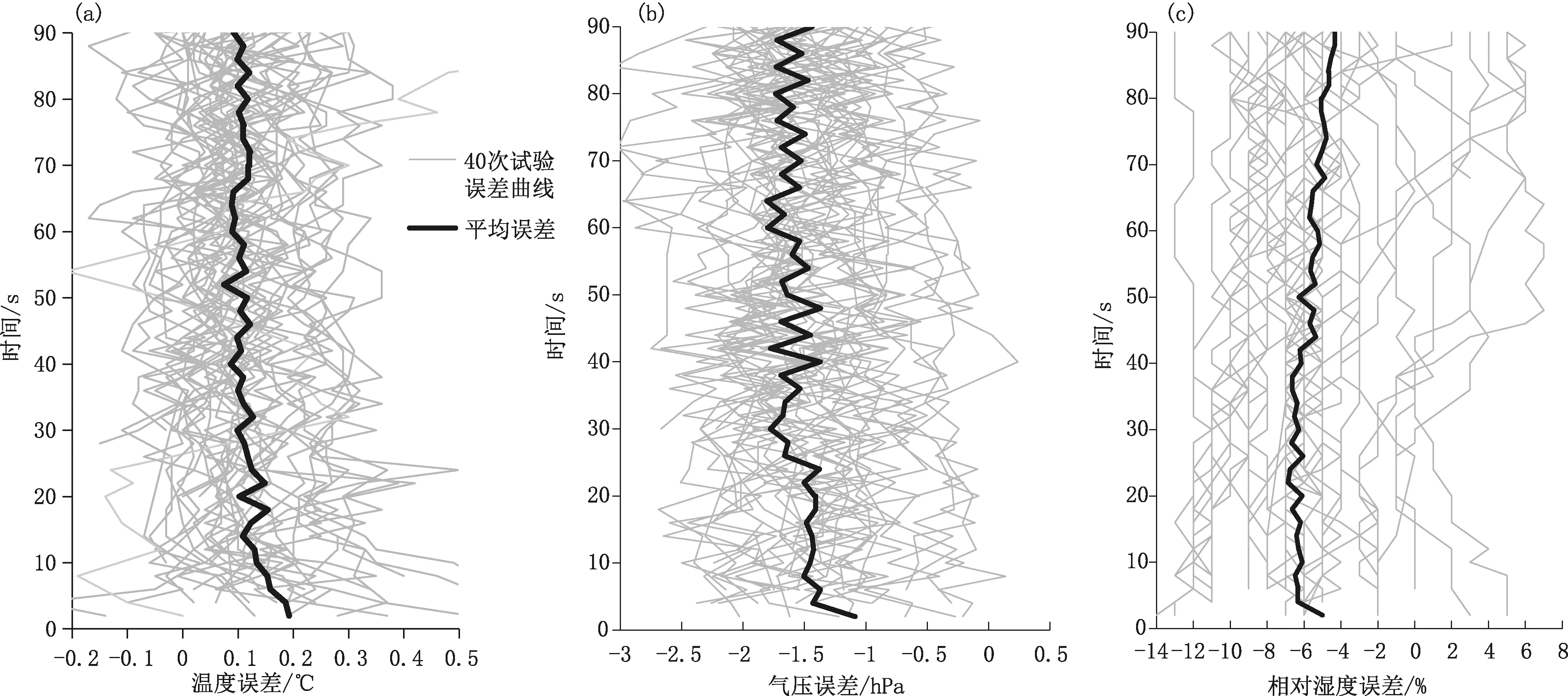
图2 2013年12月广东阳江GTS1型探空仪与RS92型探空仪同球施放比对试验温度(a)、气压(b)、相对湿度(c)误差分布
可以看出,各次施放温度误差随施放时间成折线变化,各次施放间有较大系统差异,但误差随施放时间的变化是基本相同的,2 s间的误差变量通常在0~0.4 ℃之间;气压误差随施放时间的变化情况与温度基本相同,2 s间的误差变量多数在0~1 hPa之间;相对湿度在2 s间的误差变量多数在0~2%之间。
由于本次试验1次只施放了1个RS92型探空仪,无法得到其本身2个之间误差的变化情况。这里取2008年7月锡林浩特国产GPS探空仪选型试验的数据进行分析,该试验中每次都同球施放了3个RS92型探空仪,共进行26次施放。用其中2个RS92型探空仪的施放结果,求得它们之间的相互差值,制作与图2相同的误差分布曲线。为便于比较,采用了与图2相同的时间和各气象要素误差坐标尺度。RS92型探空仪温度、气压和湿度误差分布曲线如图3所示。
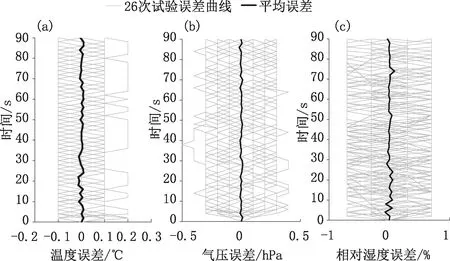
图3 2008年7月锡林浩特RS92型探空仪同球施放26次自比对试验温度(a)、气压(b)、相对湿度(c)误差分布
RS92型探空仪误差分布最明显的特征是,温度、气压和湿度的误差均存在明显的“边界”,即限制在一定的数据范围内。各次施放,间隔2 s的误差变化,温度最大为0.1 ℃,气压最大为0.2 hPa,相对湿度最大为1%,通常为相应气象要素的一个分辨力。由于RS92型的误差散布较小,可以说明用图2表示GTS1型探空仪的误差数据具有较高的可信度。
由此可以得出,由L波段高空探测系统的时序设计造成的测量元件感应气象要素至地面设备计算机软件赋时之间的时间差,造成了测量结果的随机波动是确定无疑的。对于探空仪,发射机发出气象信息,读取“更新单元”中的数据时,气象数据可能刚更新过,也可能已经维持了1.2 s以内的一段时间。与测量元件感应气象要素的时间相比,发射机发出的时间总是延迟的,其误差的变化是随机的。地面数据处理软件与探空仪造成的时间误差分布与探空仪相同。
3 L波段探空系统时差造成的测量结果不确定度
时间差的增加相当于改变了测量传感器的时间常数,而作为一阶测量系统的温度、气压和湿度传感器,其时间常数可以造成被测量值随时间实际变化的幅度衰减和相位滞后,是不能忽略的。时间差造成的测量结果不确定度,可用施放时各气象要素随高度变化的速率和时差对应的高度计算。0.98 s的时间差所造成温度、气压和湿度测量的不确定度主要取决于施放时气球上升的速度和气象要素的变化率。以中国气象局2010年发布的《常规高空气象观测业务规范》[10](以下简称“《规范》”)规定的气球标准升速计算,气球平均升速为6.7 m/s,则在0.98 s的时间内探空仪上升的高度约为6.6 m。《规范》提供了单位高度气压订正值,在原表基础上列出时差对应高度可能引起的气压的标准不确定度(表1)。
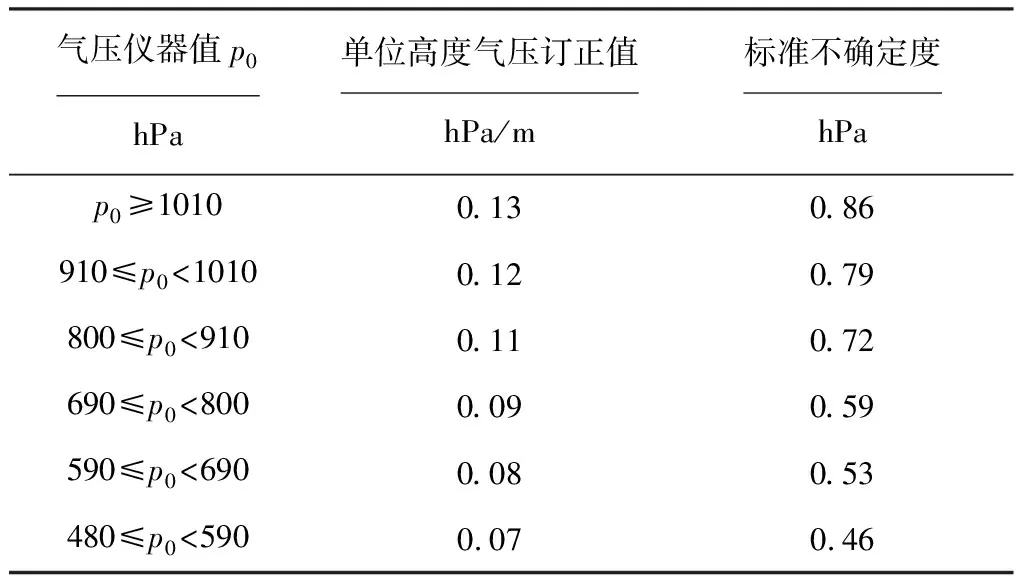
表1 时差对应高度可能引起的气压标准不确定度
《规范》没有列出气压小于480 hPa的数据,但可以估计,时差造成气压的不确定度随气压降低而减小。在对流层顶高度以下,大气温度的平均递减率为每上升100 m降低0.65 ℃,由时差0.98 s对应6.6 m高度计算,其对应的温度误差约为0.04 ℃,对于探空仪的误差来说可以忽略。湿度随高度的变化与施放时的天气条件有关,在探空仪出云入云时,有在1 s时间内相对湿度变化超过10%的记录。在这种情况下,时差的主要作用是对湿度变化幅度的衰减和相位滞后,相当于湿度测量元件时间常数的增加或减小所引起的湿度误差变化。由于情况复杂,本文不作讨论。
可以得出的初步结论是,L波段探空系统总体的时差对气压测量影响较大,对温度的影响较小,对湿度的影响较为复杂。目前业务中,由于探空业务应用文件对大气的分层主要是气压和位势高度,而位势高度又主要取决于气压,因此,由时差造成的气压不确定性,将对探空应用文件的准确性造成一定影响。从时差形成的机理可知,相对于测量元件的感应时间总是延迟的,其总体散布中心为测量元件感应气象要素后1.2 s,时差散布的扩展不确定度为0.98 s,气压误差最大可达0.86 hPa。
4 探空仪及其数据处理系统的时序设计
为保证探空仪测量数据的瞬时性,使探空仪的测量结果能够正确反映大气要素的实际变化,避免测量元件感应气象要素的时间与数据处理赋予时间之间产生时间差是非常必要的。即将在业务中推广的北斗-GPS双模式导航测风探空仪,其设计就采用了消除时差的方法,大大减小了测量结果的随机误差,且在2013年12月中国气象局阳江试验中效果良好。试验所用的2个探空仪25次自比对结果,按照图3对RS92型探空仪自比较误差的处理方法,所得误差曲线分布如图4所示。
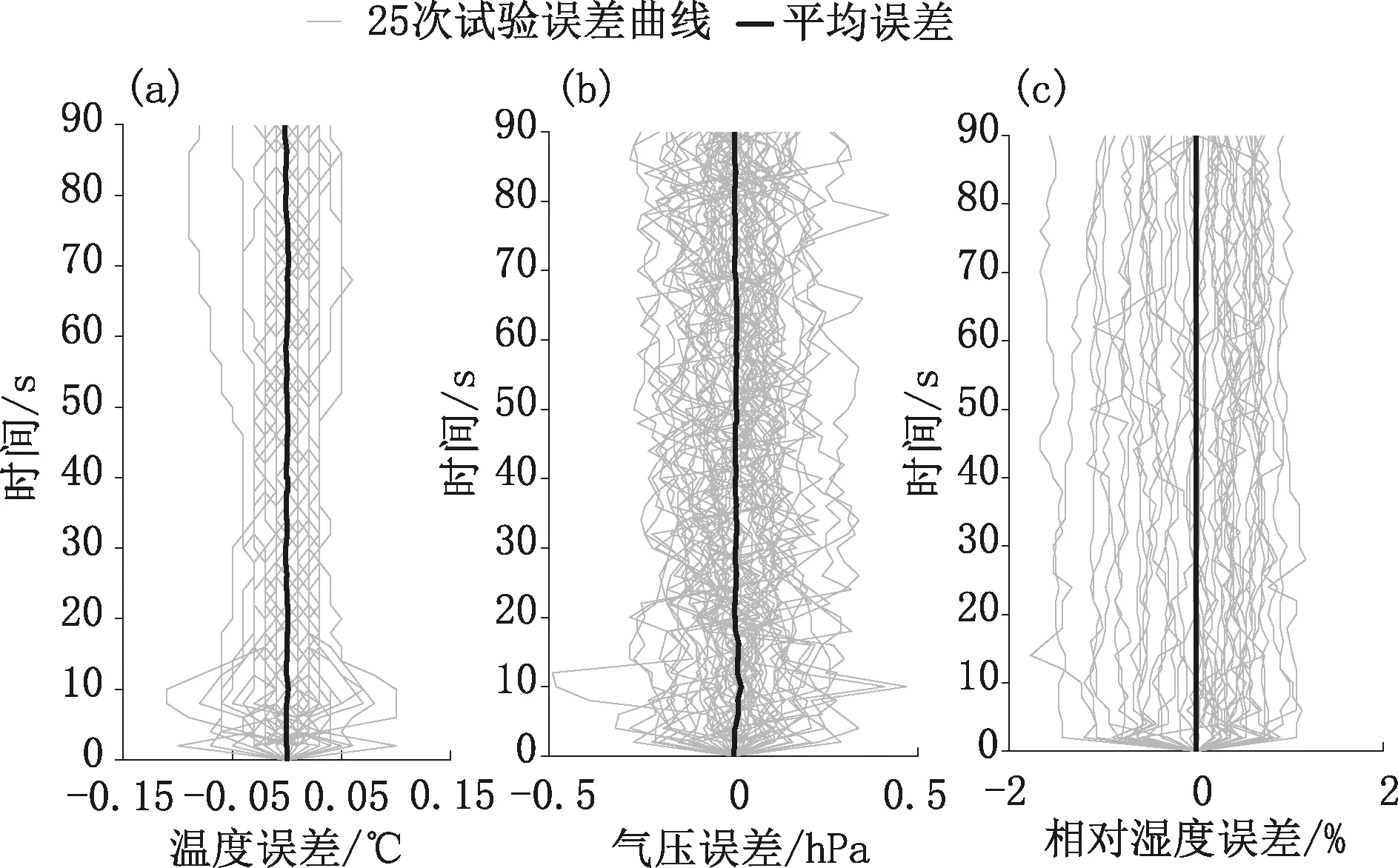
图4 2013年12月广东阳江北斗-GPS双模式导航测风探空仪25次同球施放自比对试验温度(a)、气压(b)、相对湿度(c)误差分布
可以看出,该探空仪的温度误差散布小于芬兰RS92型探空仪,气压与RS92型相当,而湿度稍差,基本达到了芬兰RS92型探测系统的水平。与RS92型比较,我国探空仪的误差曲线没有明显的边界,即仍然处于一个随机变量的影响之下。
该探空仪采用的时序设计见图5所示。其总体思路是,将所有的测量元件和标准器件通过转换电路变为电压信号,然后通过A/D(模数转换器件)转换为数字信号,并行连接在单片计算机上。目前的单片计算机通常有很多A/D转换接口,也可以直接采用单片计算机中的A/D转换器以简化电路。
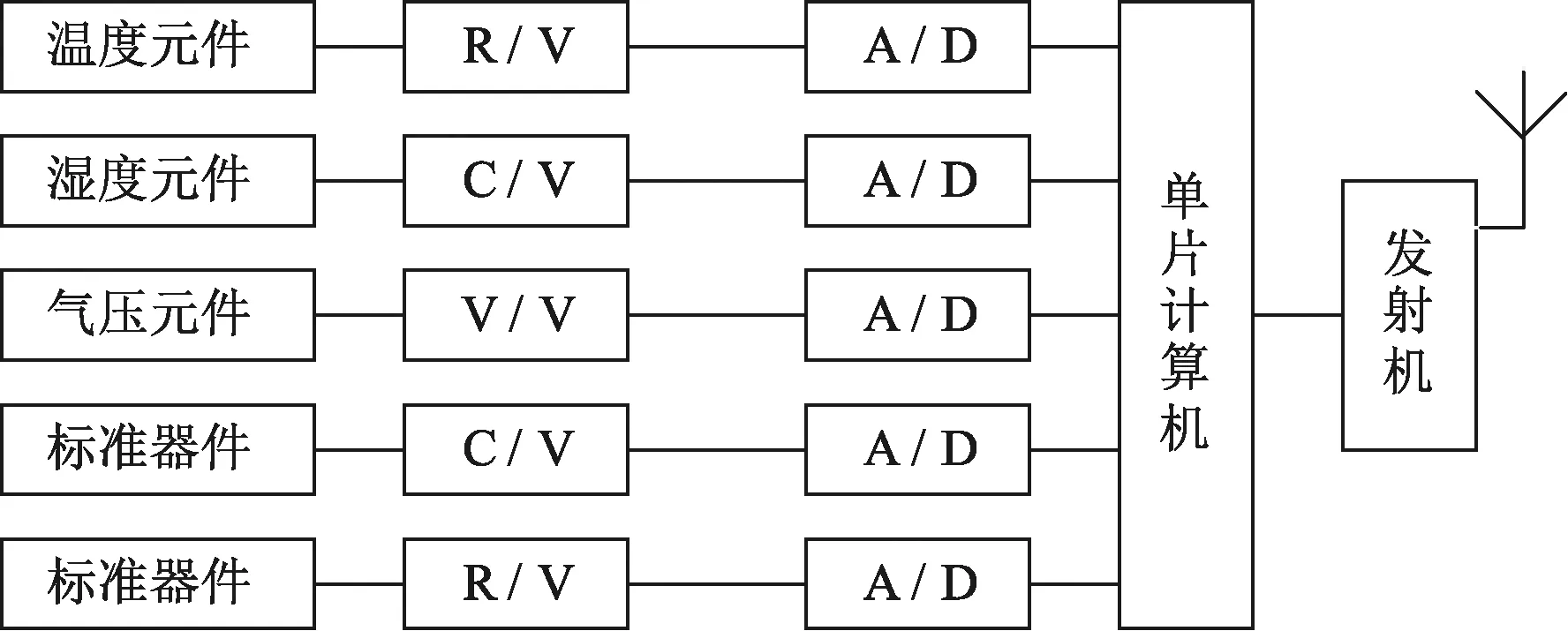
图5 北斗-GPS双模式导航测风探空仪时序设计
由于该探空仪测风系统由卫星导航数据接收处理膜片产生卫星定位数据和时间,并于1 s间隔产生信号使发射机发送信息,这样在发射卫星定位信息后立即可对气象信息进行扫描,使气象数据紧跟在定位信息之后,形成一组包括卫星定位信息和气象温度、气压和湿度的数据组,其时间放在最前面,是由导航卫星赋予的,与地面数据处理计算机无关。该方案解决了L波段探测系统将测风和探空数据分为2个文件,致使探空和测风数据不同步的问题。同时,A/D转换器的转换过程在10 ms左右,而顺序扫描所有A/D转换器输出数据的时间也在毫秒量级,这样造成的时间差是很小的。
综上所述,即将在业务中推广的北斗-GPS双模式导航测风探空仪的改进方案将显著提升我国的探空系统水平、提高探空业务质量。
5 结论
探空仪是在运动中测量气象信息的,其时间差不但可以使探测数据产生随机波动,同时还相当于增加了测量传感器的时间常数,使气象要素的实际变化造成幅度衰减和相位滞后,而进一步产生误差。因此,探空系统的时序设计是一个特别值得注意的问题。
通过试验发现,L波段探空系统总体时差对气压测量影响较大,对温度的影响较小,对湿度的影响较为复杂;相对于测量元件的感应时间总是延迟的,其总体散布中心为测量元件感应气象要素后1.2 s,时差散布的扩展不确定度为0.98 s,气压误差最大可达0.86 hPa。目前北斗-GPS双模式导航测风探空仪的设计中采用了消除时差的方法,大大减小了测量结果的随机误差,为该问题提出了改进方法。
猜你喜欢
成都信息工程大学学报(2021年3期)2021-11-22
成都信息工程大学学报(2021年3期)2021-11-22
气象与环境科学(2021年3期)2021-07-14
军民两用技术与产品(2019年7期)2019-07-26
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年23期)2018-12-26
现代农业科技(2016年22期)2017-03-24
现代农业科技(2016年21期)2017-03-06
物联网技术(2015年4期)2015-04-27