
考虑几何公差的设计与工序公差并行分配研究*
2021-11-03 07:26彭和平
组合机床与自动化加工技术 2021年10期
彭和平
(武昌首义学院机电与自动化学院,武汉 430064)
0 引言
公差是产品设计、制造和检验中最重要的产品信息之一,是CAD/CAPP/CAM/CAQ不同环节之间数据交换和共享的主要内容之一。设计公差与工序公差的并行分配,对于产品性能质量和制造成本均具有很大的影响,公差已经成为平衡产品制造成本与性能质量的桥梁[1]。目前并行公差设计模型大部分基于制造成本和质量损失之和最小进行的尺寸公差的并行分配,并没有考虑几何公差,有一些研究考虑了几何公差,但忽略了制造成本和产品满意度之间的平衡[2-3]。本研究的目的是扩展并行公差设计模型以考虑几何公差的要求。首先,在并行公差设计的环境下为了考虑几何公差的影响,探讨了几何公差的转化方法;在此基础上建立并行设计与工序公差分配模型;最后,利用非线性规划技术对模型进行求解,以获得优化设计与工序公差值,实现包括几何公差在内的并行公差分配。
1 几何公差的转换
几何公差用于控制零件在形状、方位、位置等方面的真实要素相对于理想要素或基准要素的变化。由于几何公差对零件的性能和制造成本有着重要影响,因此在公差设计中考虑几何公差是非常必要的,以满足产品功能要求,保证零件互换性和制造的经济性。根据ISO1101[4],14种几何公差被分为形状、方向、位置和跳动4种类型。并非所有的几何公差都可以转化为等效的外部公差。与位置相关的几何公差可以转化为等效的外部公差;而形状和方向公差仅仅指定局部特征,不能直接与线性尺寸耦合,它们将被视为额外的公差约束[5-6]。因此,在这14个几何公差中,只有位置度、同心度、对称度和轮廓度这4个公差直接影响工序公差链,可以转化为等效的尺寸公差,其余的几何公差项被建模为附加加工约束。
1.1 位置度公差
对于一个点的位置度公差,公差区域是直径Sφt的球体,其中心由相对于基准位置的理论上精确尺寸确定。线的位置度公差可分为三种类型:①当线的位置度公差只指定一个方向时,公差区域由两个间隔距离为T的平行平面组成的区域,并相对于所考虑的线的理论准确位置对称布置。②当线的位置度公差指定在两个相互垂直的方向上时,其公差区域为截面t1×t2的平行六面体,其轴线位于所考虑直线的理论准确位置。③当线的位置度公差在任意方向时,公差区域为直径为T的圆柱体,其轴线与所考虑线的理论准确位置重合。在上述三种情况下,考虑线的理论精确位置取决于基准位置和理论准确尺寸。对于平面或中心平面的位置度公差,公差区域应包含在间隔距离为T的两个平行平面之间,并相对于所考虑表面的理论准确位置对称配置。
图1表明如何将位置度公差转换为可集成到公差链中的等效尺寸公差。如图1中的孔相对于基准A和B的位置度公差为TP;等效线性尺寸公差在两个互相垂直方向分别为±0.5Tp·cos45°和±0.5Tp·sin45°。因此,位置度公差的转换模型可以表示为:
(1)
式中,X是理论上准确的尺寸,TP是位置度公差。
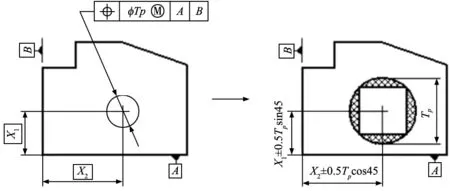
图1 位置度公差的转换
在此需要注意的是,如图1所示位置度公差指定了最大材料要求,如果孔不在他们的最大实体状态下,GD&T公差将被赋予额外的公差补偿。此外,我们假设所有的尺寸公差都是相对于其名义尺寸的双边分布,并且我们在公差转换过程中采用极值法。
1.2 同轴度公差
同心(轴)度公差是定位公差的一种,它是指关联实际要素对具有确定位置的理想要素所允许的变动全量,用于控制被测要素对基准的同心(轴)性变动。理想要素的位置由基准确定。对于点的同心度公差,所提取的点应包含在一个直径为T的圆内,圆心与基准点重合。对于轴的同轴度公差,所提取的轴应包含在轴线与基准轴线重合直径为T的圆柱面内的区域。
图2说明了同轴度公差如何转换为两个相互垂直轴上的等效线性尺寸和公差。
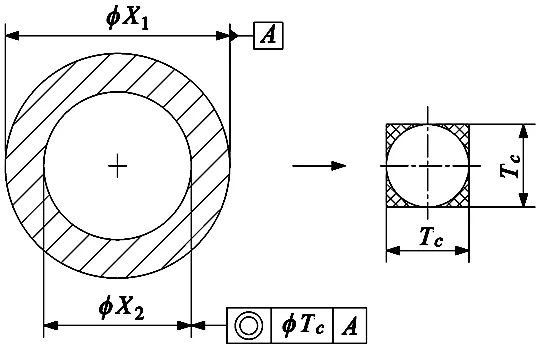
图2 同轴度公差的转换
并且相关工序公差的累计总和不应大于规定的同心度公差,也即:
(2)
式中,TC为同心度公差,Tji为与同心度公差相关的第i个工序尺寸xji的工序公差,p为相关工序尺寸的数量。
1.3 对称度公差
对称度公差也是一种定位公差,它是指关联实际要素对具有确定位置的理想要素所允许的变动全量,用于控制被测要素对基准的对称性变动,理想要素的位置由基准确定。
对于仅指定一个方向的对称度公差,其公差带为距离为公差值T,中心平面(或中心线、轴线)与基准中心要素(中心平面、中心线或轴线)重合的两平行平面(或两平行直线)之间的区域。如果对称度公差指定在两个相互垂直的方向上,则公差区域为截面t1×t2的平行六面体,其轴线与基准轴线重合。对称度公差的转换模型为:
(3)
式中,TS是对称度公差,Tji为与对称度公差相关的第i个工序尺寸xji的工序公差,p为相关工序尺寸的数量。
以图3中所示的零件为例,对称度公差的转换模型为:
(4)

图3 对称度公差的转换
1.4 其他几何公差
其他几何公差,比如:形状公差(包括直线度、平面度、圆度、圆柱度等)、方向公差(包括平行度、垂直度、倾斜度等)和跳动公差,一般应作为公差设计模型中的附加约束。具体地说,这种类型的几何公差的值不应该大于与引起这些几何公差的加工表面相关的工序公差。不等式可以表示为:
TG≤Tji
(5)
式中,TG是几何公差,Tji是与几何公差相关的工序尺寸xji的双向公差。
根据上述分析,几何公差的转换有些可以转化为等效的尺寸公差,有些只能作为公差优化设计中的附加约束条件。
2 并行公差模型
本节对基于制造成本-期望质量损失的并行公差设计模型进行扩展,提出综合考虑尺寸公差和几何公差的并行优化分配方法。
2.1 成本-工序公差模型
产品制造成本与其公差之间存在着密切的联系,国内外许多学者对成本-公差建模进行了研究。目前,比较成熟的成本-公差模型包括:指数模型、倒数平方模型、倒数幂指数模型、倒数幂和指数混合模型、指数和幂指数复合模型、倒数模型、离散模型、改进的指数模型、线性和指数复合模型、三次多项式模型、四次多项式模型等。假设在第i道工序中加工第j个零件特征到工序公差Tji的制造成本为:
cji=C(Tji),i=1,2,…,p;j=1,2,…,q
(6)
总的成本是每道工序加工制造成本之和,于是有:
(7)
式中,Cji(Tji) 是零件第j个特征的第i道加工工序的制造成本;q是零件特征数;p是第j个特征的加工工序数。
2.2 期望质量损失与工序公差函数关系
文献[7]提出了被广泛使用的二次质量损失函数。对于一个复杂的装配,其功能要求由多个装配特征确定。设产品第k个装配尺寸zk(k=1, 2, …,r)是q个零件设计尺寸的函数:
zk=gk(y1,y2,…,yq)
(8)
式中,yj(j=1, 2,…,q)为第j个零件设计尺寸。
用Taylor级数展开式(8)并且略去二阶及以上高次项,则装配尺寸zk的偏差值为:
(9)

文献[8]扩展了Taguchi的质量损失函数,提出了计算这些具有多重相关特征的产品质量损失的一般公式:
(10)
式中,Akl为质量损失系数。根据文献[3]其期望质量损失为:
(11)


(12)
(13)
(14)
在产品设计阶段,假设零件设计尺寸的变动是正态分布的,装配尺寸的变动也为正态分布。根据统计理论,产品装配尺寸参数的方差和协方差为:
(15)
(16)

在工序公差设计阶段,零件每个设计尺寸yj可表达为工序尺寸xji的函数(i=1, 2, …,p)。
yj=fj(xj1,xj2,…,xjp)
(17)
式中,xji是设计尺寸yj的第i步工序尺寸;p是与设计尺寸yj相关的加工工序总数。
在稳定加工条件下,假设所有的被加工尺寸xji是正态分布,类似地有:
(18)
(19)

将式(18)和式(19)分别代入式(15)、式(16)和式(9),有:
(20)

(21)
(22)
在一般正常生产的情况下,可以假定各组成环尺寸及公差服从正态分布,并假定各组成环尺寸及公差相对于公差带中点呈对称的正态分布,取零件的公差范围为±3σ(σ为正态分布的标准偏差)对应零件的合格率为99.73%,则有:
(23)
式中,Tji是工序尺寸xji的双向公差。
将式(23)代入式(20)、式(21)有:
(24)

(25)
将式(24)、式(25)代入式(11),于是表示为工序公差Tji的函数形式的期望质量损失为:

(26)
2.3 并行公差模型
在并行公差设计中,目标函数为产品的总成本,它是产品的制造成本与期望质量损失的和,各工序公差为待确定的设计变量。
目标函数
min{E[L(Tji)+MC(Tji)]}
(27)
式中,E[L(Tji)] 和MC(Tji)分别是产品的期望质量损失和总的制造成本。
约束条件
(1)基于WC(Worst-case)模型的并行公差累积约束
(28)
式中,Tzk为产品功能参数zk的公差极限上限。
(2)基于RSS模型的并行公差累积约束
(29)

(3)几何公差要求的约束
如前节所述,只有位置度、同心度、对称性度和轮廓公差可以直接转化为等效的尺寸公差,其余的几何公差项,如直线度、圆度、垂直度、平行度等,可视为附加加工约束,这些加工约束就是几何公差不应该大于相关的工序公差。
(4)每道加工工序的经济加工范围约束
(30)

3 实例

根据该装配的功能需求,可以识别出两个关键的装配尺寸链,如图4所示,表示这两个装配尺寸链的方程分别为:
z1=-y1-0.5y2+0.5y3+y4
z2=-0.5y3-y5+y6+ypo+yco+y7
式中,ypo是由小孔垂直轴线相对于基准面A、C的位置度公差Tpo转换而来的等效公称尺寸;yco是大孔轴线相对基准轴线B的同轴度公差Tco转换而来的等效公称尺寸。
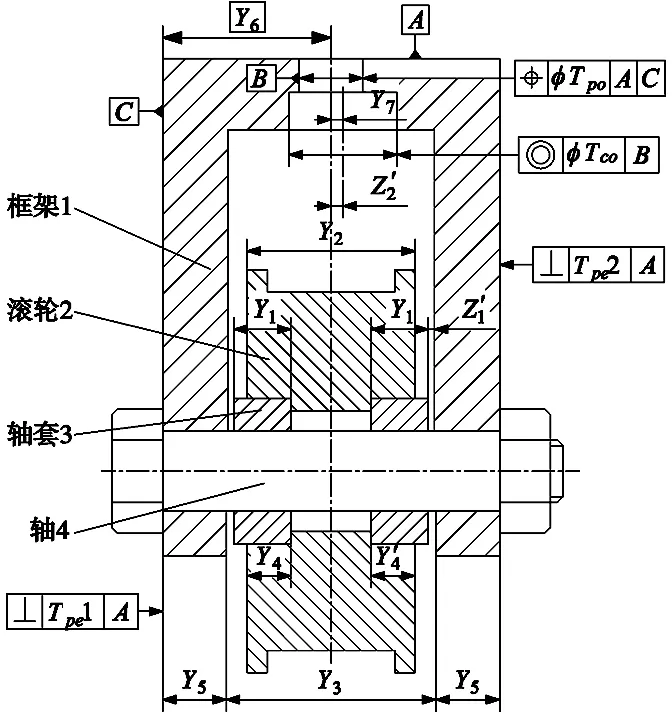
图4 滚轮装配
图5~图7所示为装配中关键零件框架1、滚轮2、轴套3的加工顺序,表1列出了这3个零件的加工工序规划。根据式(9),我们有:
δz1=-δy1-0.5δy2+0.5δy3+δy4
δz2=-0.5δy3-δy5+δy6+δypo+δyco+δy7
根据图5~图7和表1给定的各个零件的加工工序,可以获得下列加工方程:
y1=x32-x33
y2=x24
y3=x15-x16-x17
y4=x25
y5=x17
y6=x18=40
y7=x19-x18=0
于是,根据式(24)和式(25)有:

图5 框架1的加工顺序
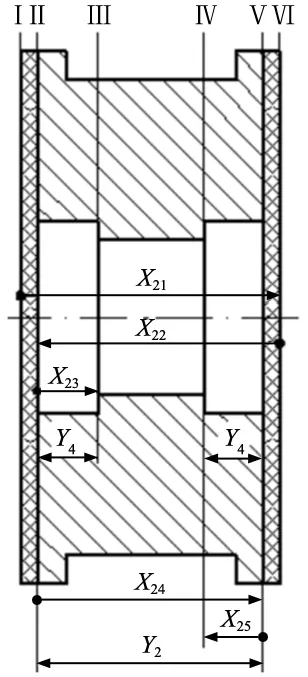
图6 滚轮2的加工顺序

图7 轴套3的加工顺序
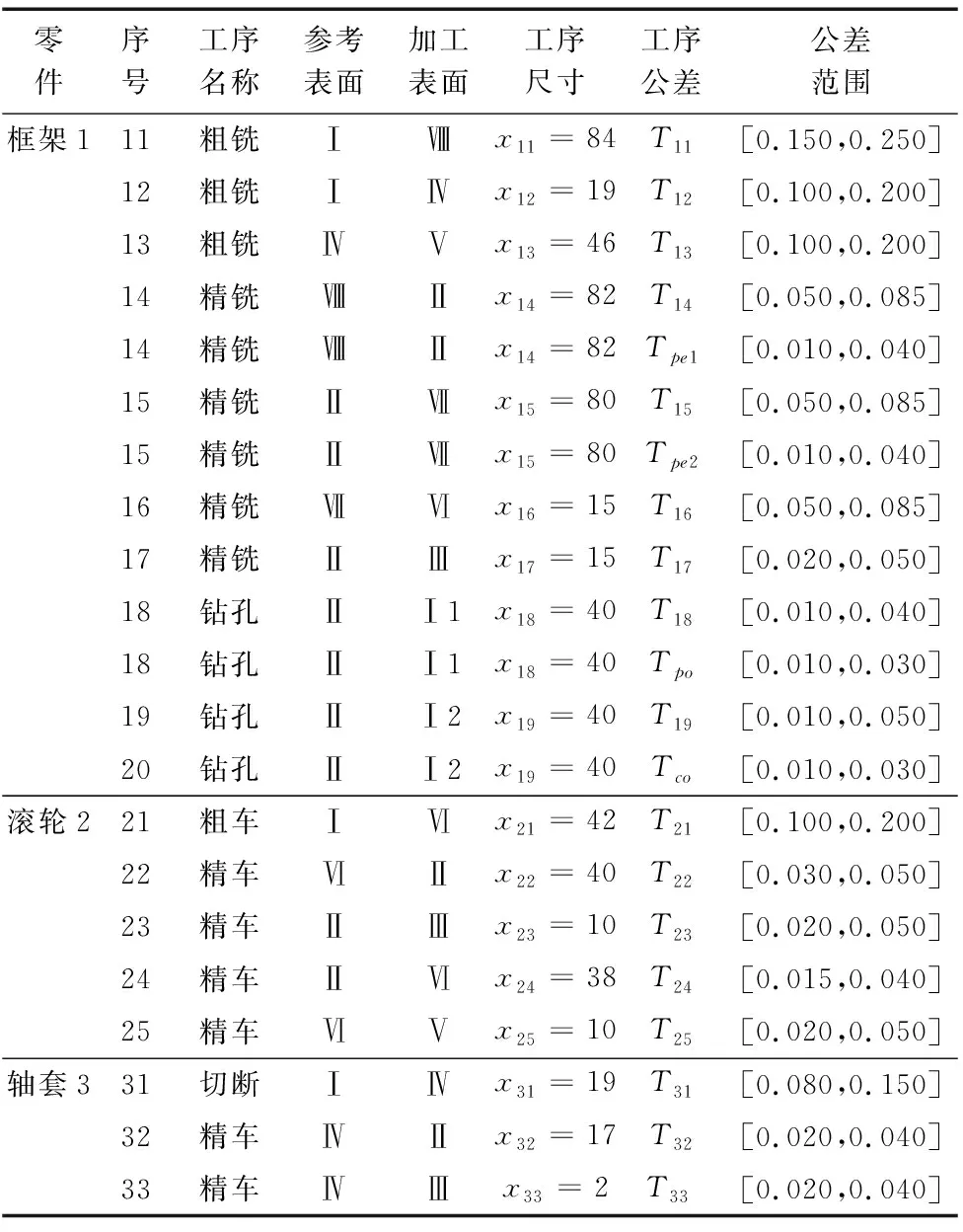
表1 框架1、滚轮2、轴套3的加工工序 (mm)
表1中,Tpo、Tco分别为框架1的小孔轴线相对于基准面A、C的位置度公差和大孔轴线相对基准轴线B的同轴度公差;Tpe1和Tpe2分别是框架1的左、右两平面相对于基准平面A的垂直度公差。
在稳定生产条件下,假设各工序尺寸分布中心值与其目标值重合,在此忽略其偏差对期望质量损失的影响,根据式(26)期望质量损失表达式为:

注意:本例仅考虑由于与装配功能要求相关的工序尺寸的变动所引起的期望质量损失。对其他工序尺寸使用最经济的公差值,这些工序尺寸的变动对质量损失没有贡献,同样的考虑也应用于制造成本。
本例制造成本模型采用由文献[10]提出的倒数幂和指数混合模型,根据该模型零件第j个设计参数通过第i道工序获得工序公差Tji的制造成本由下式确定:
式中,参数a0,a1,a2,a3,a4可以用最小二乘近似法确定。根据文献[10]的研究:
对于孔加工:
对于平面铣削:
对于车削:
根据式(7),本例的制造成本为:

式中,

在并行设计的环境下,综合期望质量损失和总的制造成本,可以得到并行公差优化模型:

考虑约束条件包括产品功能约束、几何公差要求约束、加工工序的经济加工范围约束等。
(1)产品功能约束:


(2)几何公差约束:
T18-0.5Tpo·cos45°≤0
T18+T19-Tco≤0
Tpe1-T14≤0
Tpe2-T15≤0
(3)经济加工工序边界约束 :
0.050≤T14≤0.085,0.010≤Tpe1≤0.040
0.050≤T15≤0.085,0.010≤Tpe2≤0.040
0.050≤T16≤0.085,0.020≤T17≤0.050
0.010≤T18≤0.040,0.010≤Tpo≤0.030
0.010≤T19≤0.050,0.010≤Tco≤0.030
0.015≤T24≤0.040,0.020≤T25≤0.050
0.020≤T32≤0.040,0.020≤T33≤0.040
本例采用非线性规划技术求解该模型,获得优化工序公差和相关设计公差见表2和表3。

表2 优化工序公差

表3 优化设计公差
4 结束语
并行公差设计模型将产品设计阶段和零件加工阶段结合起来,实现了零件工序公差和设计公差的同步分配,可以保证产品的可制造性,提高设计效率,降低整体生产成本,减少不合格产品数量,缩短产品开发周期。本研究基于几何公差的数学表达,进一步将并行公差设计模型扩展到考虑几何公差要求。具体方法是:与位置特征相关的几何公差可以转换为等效尺寸公差;与形状或方向特征相关的其他几何公差被视作几何约束,然后将等效尺寸公差或几何约束集成到并行公差设计模型中,从而在该模型中考虑几何公差要求。最后,利用非线性优化技术,将期望质量损失和制造成本之和最小化,同时得到优化的设计和工序公差。下一步的研究将该模型扩展到同时包含多个尺寸和几何公差的复杂特征,以及含有几何公差原则的公差并行分配问题等。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
福建质量管理(2019年6期)2019-04-02
水利科技与经济(2017年10期)2017-04-25
综合智慧能源(2017年10期)2017-01-18
公民与法治(2016年19期)2016-05-17
综合智慧能源(2016年1期)2016-02-03
读者·校园版(2015年7期)2015-05-14
河南科技(2014年16期)2014-02-27
河南科技(2014年15期)2014-02-27
电子设计工程(2014年6期)2014-02-27
