
基于纹理特征的网络多媒体图像模板匹配方法
2021-11-10 05:27周培斌
电子设计工程 2021年21期
周培斌
(山西医科大学第一医院,山西太原030001)
网络多媒体环境中复杂图像的采集易受网络环境干扰而产生椒盐噪声影响图像质量,因此需要对这类图像进行模板匹配[1]。以往多维像素特征分布重构模型的构建利用模板匹配方式,使用这种方法无法提取椒盐噪声干扰图像的纹理特征,存在运算量大、图像内容不能区分以及匹配率低的问题[2]。
为解决以上问题,提出基于纹理特征的网络多媒体图像模板匹配方法。
1 图像纹理特征分割与提取
使用小波多尺度滤波方法进行椒盐噪声干扰图像特征匹配,首先计算采样信息长度,计算公式为:

式(1)中,c表示网络多媒体图像的边缘轮廓特征量;x表示椒盐噪声干扰图像轮廓像素集;d(xi,xj)表示多媒体图像序列;k1、k2分别表示图像关键特征点和像素特征点[3-5]。
依据椒盐噪声干扰图像纹理特征,分割相邻节点的图像特征,获取轮廓线,该轮廓线的计算公式如式(2)所示。

式(2)中,,…,表示受到椒盐噪声干扰的图像像素参数;λj表示离散像素序列;σi表示受到椒盐噪声干扰的图像纹理均值;z表示图像标准偏差[6-7]。依据该轮廓线,完成图像纹理特征分割[8]。
以椒盐噪声干扰下的图像为研究对象,使用基于模板匹配的椒盐噪声干扰图像自动分割方法[9],通过对椒盐噪声干扰图像的边缘轮廓特征量的初始化,提取图像特征点。
结合边缘轮廓特征和椒盐噪声干扰图像纹理特征,可获取干扰图像轮廓线,该轮廓线的计算公式如式(3)所示。

式(3)中,W表示椒盐噪声干扰图像轮廓尺寸;η表示图像纹理特征信息;α表示在坐标系横轴像素特征强度。
在m×m窗口μi内,获取特征提取模型如式(4)所示。

公式(4)中,ϕα表示多分辨干扰图像像素特征点,ϕβ表示干扰图像纹理特征;β表示在坐标系纵轴的像素特征强度,G(α,β,σi)表示椒盐噪声干扰图像在网络多媒体几何空间中提取出的图像纹理特征分量[10-12]。
2 基于纹理特征网络多媒体图像模板匹配
图像模板匹配原理如图1所示。
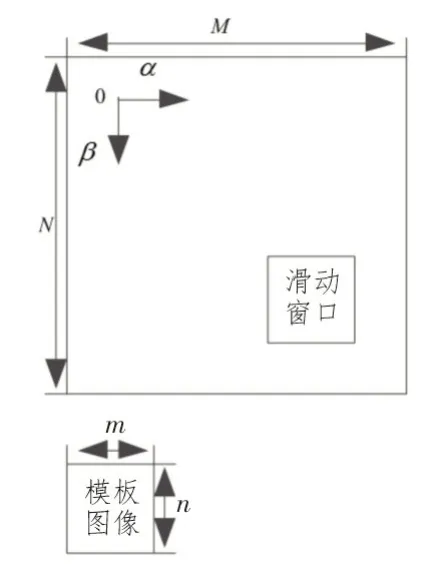
图1 图像模板匹配原理
如图1所示,通过迭代计算,在全矩阵搜索情况下,获取相似性度量值矩阵和各值矩阵,确定相似性度量值的最大值和最小值,该位置即为最佳匹配位置[13]。在待匹配图像滑动策略支持下,分析模板中各个子块的图像纹理特征[14-15]。基于纹理信息对模板中的每个子块进行权值设置,使模板滑入待匹配图像,模板中的每个子块滑入待匹配图像滑动窗口中的每个点。
按照加权系数,将规格化的相关系数组合为加权和,去掉平均值,可以得到一个新的相似性度量矩阵,其中最大值仍然是匹配位置[16]。2×2 的分块匹配策略如图2所示。

图2 2×2 的分块匹配策略
a11、a12、a21、a22分别代表模板匹配中各个子块的加权系数,即为基于纹理特征的权值系数。假定这些权值系数已经计算完成,此时各点的相似度测度计算结果如下:

式(5)中,ταβ表示待匹配图像滑动窗口子块取均值归一化系数,由此计算每一点的相似性度量值:

τ(α,β)表示整个模板图像与待匹配图像滑动窗口相似程度。
基于上述内容,设计网络多媒体图像模板匹配流程,如图3所示。

图3 网络多媒体图像模板匹配流程
依据图3所示过程确定检测点。由于检测点的选取是不稳定的,每一个像素都具有一定的梯度,所以需要用一个梯度表达式来计算梯度的大小和梯度的方向,以表示该像素。在此基础上,确定图像中的检测点,每个检测点都包含3 个信息:位置、比例、方向;每个检测点都具有平移、比例和旋转不变性。描述符生成如图4所示。

图4 描述符生成
如图4所示,可产生待匹配图像和模板图像的特征点。在获取模板图像和两个待匹配图像的点集后,再对两幅图像进行匹配。若模板图像中的点在匹配图像中找到了对应点集,就可以认为实现了成功匹配。若找不到相应的点,则表示匹配失败。通过上述过程,完成特征点集匹配。
3 自适应模板修正
由于网络多媒体图像具有动态性,只对一组图像处理较难,很难保证每一组图像都具有最佳匹配点,因此,需分析跟踪误差。积累误差越大,跟踪窗口越偏,最终导致目标丢失。需要注意的是,如果没有找到最佳匹配点,就会基于旧模板与当前图像最佳匹配位置的匹配置信度生成新模板,从而获得更好的跟踪效果。自适应模板修正流程如图5所示。

图5 自适应模板修正流程
依据自适应模板修正流程,计算最佳匹配值,并依据该值确定目标图像当前最佳匹配位置,得到更新后的模板。根据旧模板的最佳匹配值和当前最佳匹配位置,确定更新后的模板。加权权值可用于衡量不同目标图像间最佳匹配位置的匹配程度,以此作为衡量当前帧模板的更新依据。当加权权值大于或等于0.8 的情况下仍使用旧模板;当加权权值小于0.8 的情况下更新目标模板,该方法无需更新每帧模板,提高了实时性、节省了计算时间。
4 实 验
为了验证所提方法的应用性能,通过对比实验进行验证。使用C++语言,在Windows 10 操作系统下,将影像传入计算机中,并利用NVIDIA 显卡处理影像,将处理好的图像显示在界面上,结合Matlab 进行实验分析,由此对基于纹理特征的网络多媒体图像模板匹配方法研究的合理性展开分析。
4.1 特征点匹配
为了改变特征点分布不均匀的情况,需对重叠区域进行分块处理,再提取控制点,并将分块中心加到相关序列之中,获取如图6所示的匹配结果。
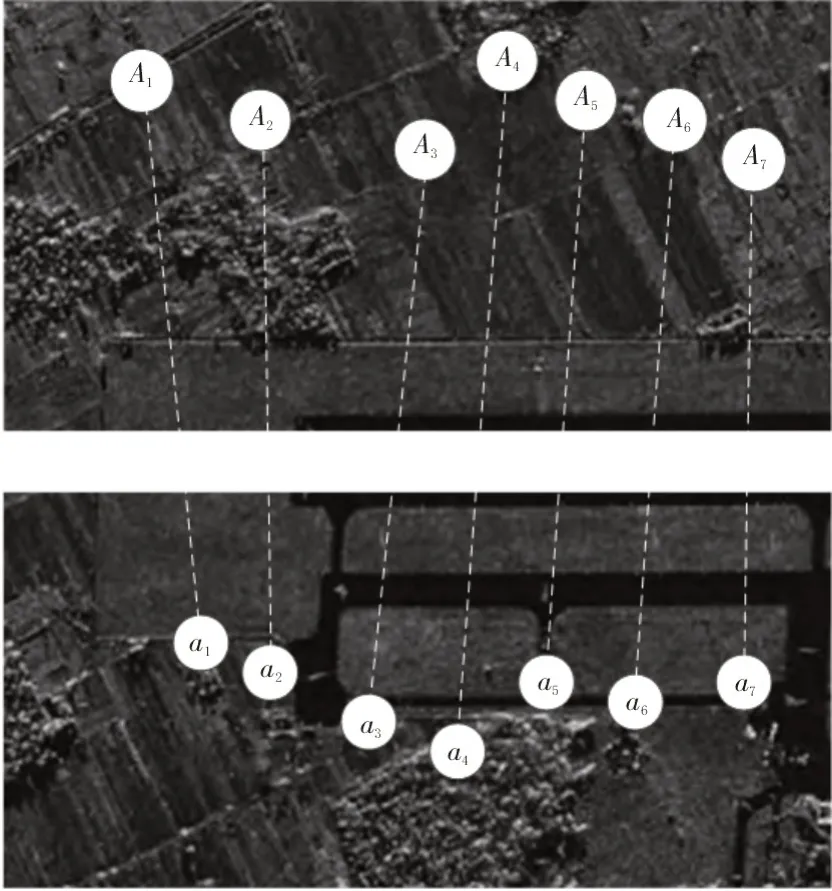
图6 特征点匹配
将分块作为控制中心,可改善无控制点的分布情况,在无控制点分布区域内将所有连接线进行连接,形成匹配信息,由此确定区域格局。
4.2 实验结果与分析
针对上述匹配的7 个特征点,在无椒盐噪声干扰和有椒盐噪声干扰两种情况下,分别使用传统模板匹配算法和基于纹理特征匹配方法对图像模板匹配精准度进行对比分析。
4.2.1 无椒盐噪声干扰
在无椒盐噪声干扰环境下,使用两种方法分析图像模板匹配精准度,结果如表1所示。

表1 无椒盐噪声干扰下两种方法匹配精准度对比分析
由表1可知,传统模板匹配算法的图像模板匹配精准度在60%左右波动,而基于纹理特征匹配方法的图像模板匹配精准度始终保持在95%以上,说明在该环境下,所研究方法的图像模板匹配精准度较高。
4.2.2 有椒盐噪声干扰
在该环境下,使用两种方法分析图像模板匹配精准度,结果如图7所示。
由图7可知,在3 种噪声密度下,传统方法的图像模板匹配精准度较低,始终低于50%,而基于纹理特征匹配方法不会受到噪声干扰,图像模板匹配精准度较高,始终高于75%,说明在该环境下,所研究方法的图像模板匹配精准度较高。

图7 椒盐噪声干扰下两种方法匹配精准度对比分析
5 结束语
结合纹理特征,匹配网络多媒体图像模板,解决了实时处理困难和模板漂移等问题。为减少椒盐噪声干扰问题的出现,采用最优匹配值来分析目标图像和模板图像之间的匹配情况。尽管已取得了一些进展,但仍然存在许多问题有待解决,尤其是如何提高纹理分析在复杂环境下的精度和鲁棒性,未来将针对该部分内容进行重点研究。
猜你喜欢
软件(2020年3期)2020-04-20
当代陕西(2020年24期)2020-02-01
摄影之友(影像视觉)(2018年12期)2019-01-28
安阳工学院学报(2018年6期)2018-11-28
网络安全和信息化(2018年3期)2018-03-03
自然资源情报(2017年4期)2017-11-26
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
饮食科学(2014年5期)2014-06-18
电视技术(2014年19期)2014-03-11
