纯电动汽车驱动扭矩的安全监控策略优化
2021-11-12 03:21卢若振田燕龚春忠
汽车实用技术 2021年20期
卢若振,田燕,龚春忠
纯电动汽车驱动扭矩的安全监控策略优化
卢若振,田燕,龚春忠
(合众新能源汽车有限公司,浙江 嘉兴 314500)
驱动系统的扭矩输出能力是新能源汽车动力输出的一个关键指标,扭矩输出的异常会致使整车出现异常加减速现象,甚至会导致危险后果,其安全监控是整车控制中安全等级最高的。文章讲述了纯电动轿车驱动系统扭矩的策略设计及仿真,使其能够在确保整车安全前提下使得整车行驶更具舒适性。
驱动扭矩;安全监控;仿真;舒适
前言
本文对驱动扭矩的安全监控进行模型分析,设计控制策略,利用仿真分析软件,对所设计的策略进行仿真分析和验证[1]。具体方法:根据ISO26262的标准[2]和已有的电子油门(E-GAS)标准[3],对目标驱动扭矩的安全监控进行危害分析和风险评估,分解安全目标,确定安全监控结构[4];设计驱动扭矩安全监控策略[5];对扭矩监控进行仿真验证[6]。
1 驱动扭矩监控需求分析
根据ISO26262的标准,对目标扭矩安全监控的功能进行逐个分析,筛选其危险点,并依据严重度、暴露率和可控性三个危险因子来判别危险等级。经过危害分析和风险评估,可得目标扭矩安全监控的ASIL等级为Ⅳ,将整车驱动系统输出的扭矩突变的风险控制在可接受范围内,将其进行功能目标分解:正确采集驾驶员的请求扭矩(SG1);正确解析驾驶员的请求扭矩(SG2);正确执行驾驶员的请求扭矩(SG3)。各子安全目标继承了总功能的ASIL 等级(即ASIL等级均为Ⅳ),依据ISO26262的标准要求,将目标分解到各个子系统通过冗余的方式来提高系统的安全完整,从而保证安全目标的达成。
根据上述安全目标,需要进一步分解到各个子系统,确保安全目标的实现,驱动扭矩监控的总体结构如图1所示。
表1 ASIL等级
代码内容ASIL等级 SG1系统需要正确采集驾驶员的请求扭矩Ⅳ SUB SG1_1系统通过传感器1、通道1采集驾驶员扭矩请求Ⅱ SUB SG1_2系统通过传感器2,通道2采集驾驶员扭矩请求Ⅱ SG2系统需要正确解析驾驶员的请求扭矩Ⅳ SUB SG2_1系统将驾驶员踏板输入解析成驾驶员扭矩请求值1Ⅲ SUB SG2_2系统将驾驶员踏板输入解析成驾驶员扭矩请求值2,并对请求值1进行校验Ⅱ SG3系统需要正确执行驾驶员的请求扭矩Ⅳ SUB SG3_1电机控制单元正确控制驱动电机的输出扭矩Ⅳ
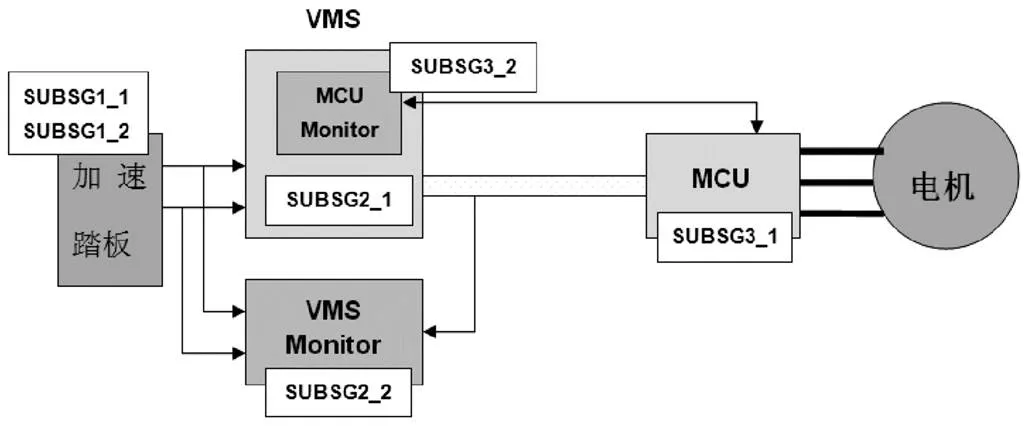
图1 驱动扭矩监控功能总体结构与安全目标分解
2 主从式安全监控结构设计
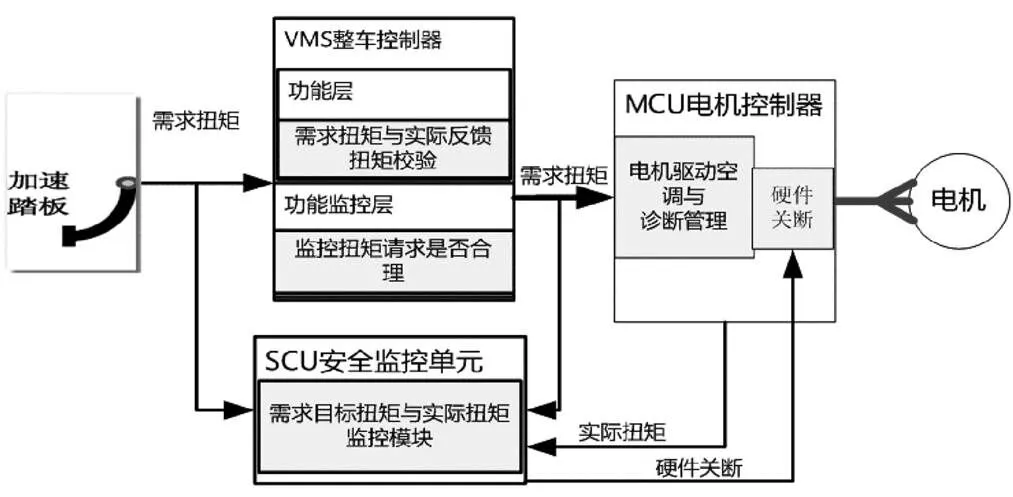
图2 主从式驱动扭矩安全监控结构
在已有的整车安全监控系统基础上,结合加速踏板监控所定义的标准,设计主、从式驱动扭矩监控架构,在该架构中,采用独立安全监控芯片方案对纯电动汽车整车控制器输出的目标驱动扭矩和电机控制器MCU反馈的电机实际输出扭矩进行监控。在该安全监控系统中,主芯片采用Freescale MPC5607B 5607B芯片,安全监控芯片采用Freescale 9S12 G64,安全监控功能由主、从芯片配合完成,如图2所示。完成监控的总体架构如图3所示,在该三层的体系中,第一层为功能层,包含对整个系统的基本功能的诊断;第二层为功能监控层,对整个系统的功能和重要信号做监控,同时满足第三层的监控需求;第三层为从芯片监控层,通过对主芯片进行问答式交互通信,确保主芯片的健康,同时对第二层的软件流及内存进行安全监控。
图3 安全监控总体结构
3 驱动扭矩监控策略分析
根据设计的安全监控架构,对电机输出扭矩监控策略进行设计。安全监控单元和VCU电机目标扭矩计算是独立并行的,大部分工况下,两者的控制策略基本相同,都是根据采集到的传感器信号,以及车载网络传来的信号,决定车辆的工作模式,并对各个模式下的最大允许扭矩,进行了规定。例如加速踏板位置识别,是通过AD转换控制器解析加速踏板传出的两路信号,并对解析后的信号值进行判断,并对油门和制动优先权进行判别,从而得到驾驶员的需求加速踏板定值。不同工况下,油门和制动的控制策略不同,如制动能量回收控制,为了保证最大程度的制动能量回收效果,请求扭矩控制单元的控制策略会侧重于系统的经济性。以系统及设备的安全为约束条件,但在安全监控单元,则刚好相反。当油门和制动优先权冲突时,通过柔性切换方式,以冲突的频度和两种差值的程度为自变量,计算出两个目标值的权重,最终根据权重大小来判断最终的请求扭矩,具体算法如下:
=T−T(1)
=C/t(2)
T为安全转矩,T为制动回收转矩,C为转矩冲突数,t为时间常数,为转矩冲突大小,为转矩冲突频率。
根据冲突的大小和频率进行查表,得到安全扭矩和制动回收扭矩的权重系数、,最后得到输出的目标扭矩,如公式(3)所示。
T=w*T+w*T
w∈(0~1),w∈(0~1) (3)
经过前面几个模块得出的允许扭矩,与当前VCU请求扭矩合成,若监测到输出扭矩不合理,启动对请求输出扭矩的限制,保证输出扭矩切换的平顺性,在扭矩过渡期间,采取斜率方式控制,调整到安全监控单元的允许扭矩。若驱动扭矩在1秒内仍限制不住,则报瞬时BUG,OBD开始累加。
根据所设计的驱动扭矩监控策略,在Simulink仿真平台上,搭建了整车驱动扭矩安全监控的仿真模型,如图4是加速踏板开度识别模块,图5再生制动扭矩的监控策略模块,图6是驱动扭矩的滤波与合成模块。
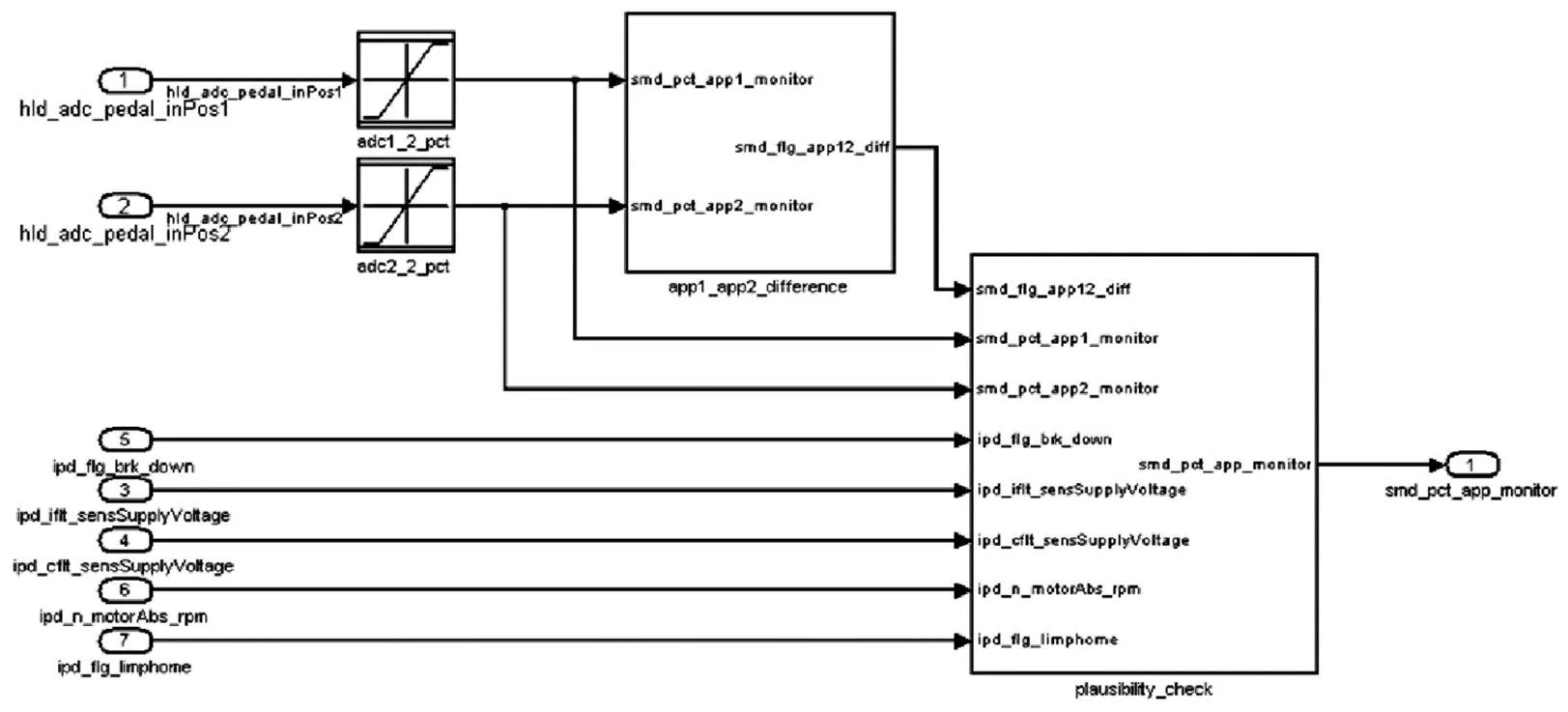
图4 加速踏板的开度识别
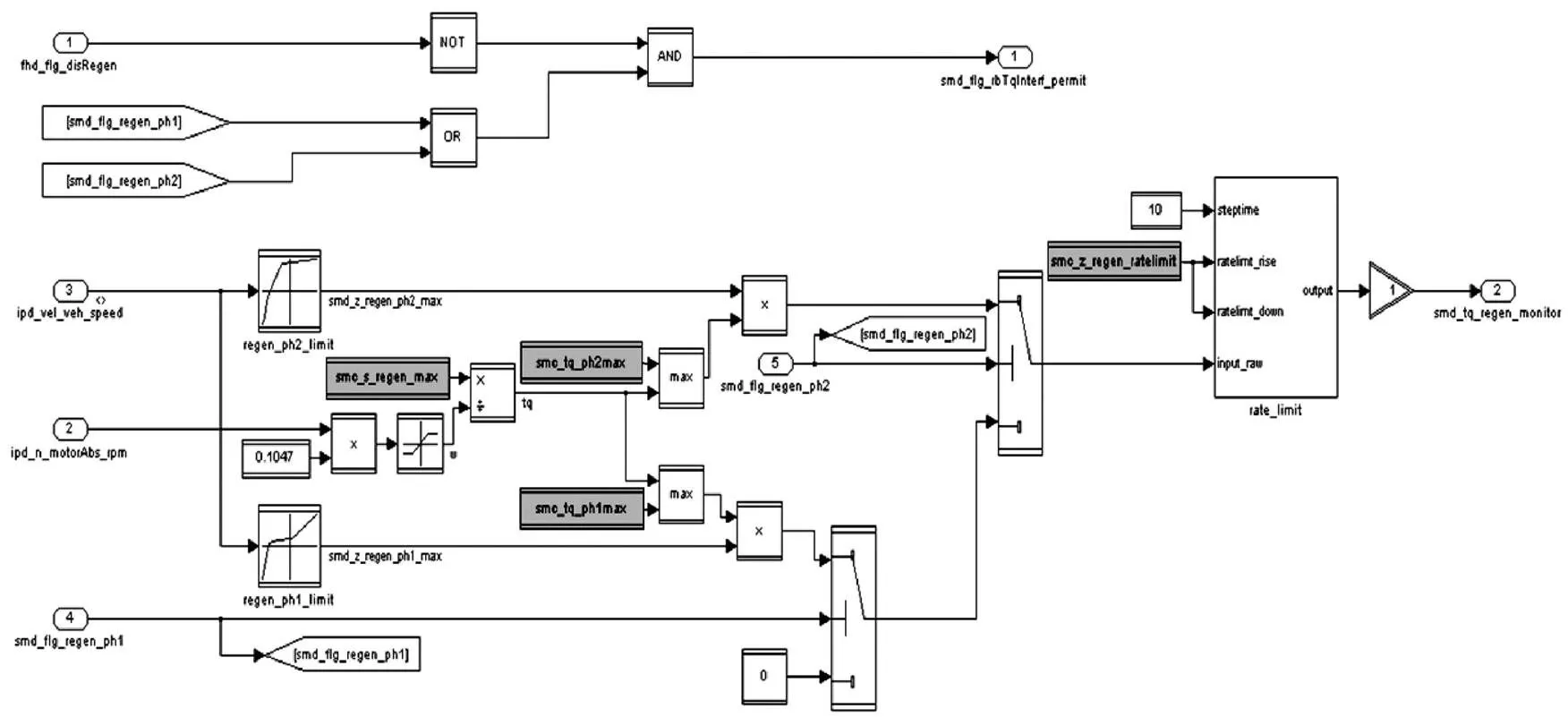
图5 再生制动扭矩的监控策略
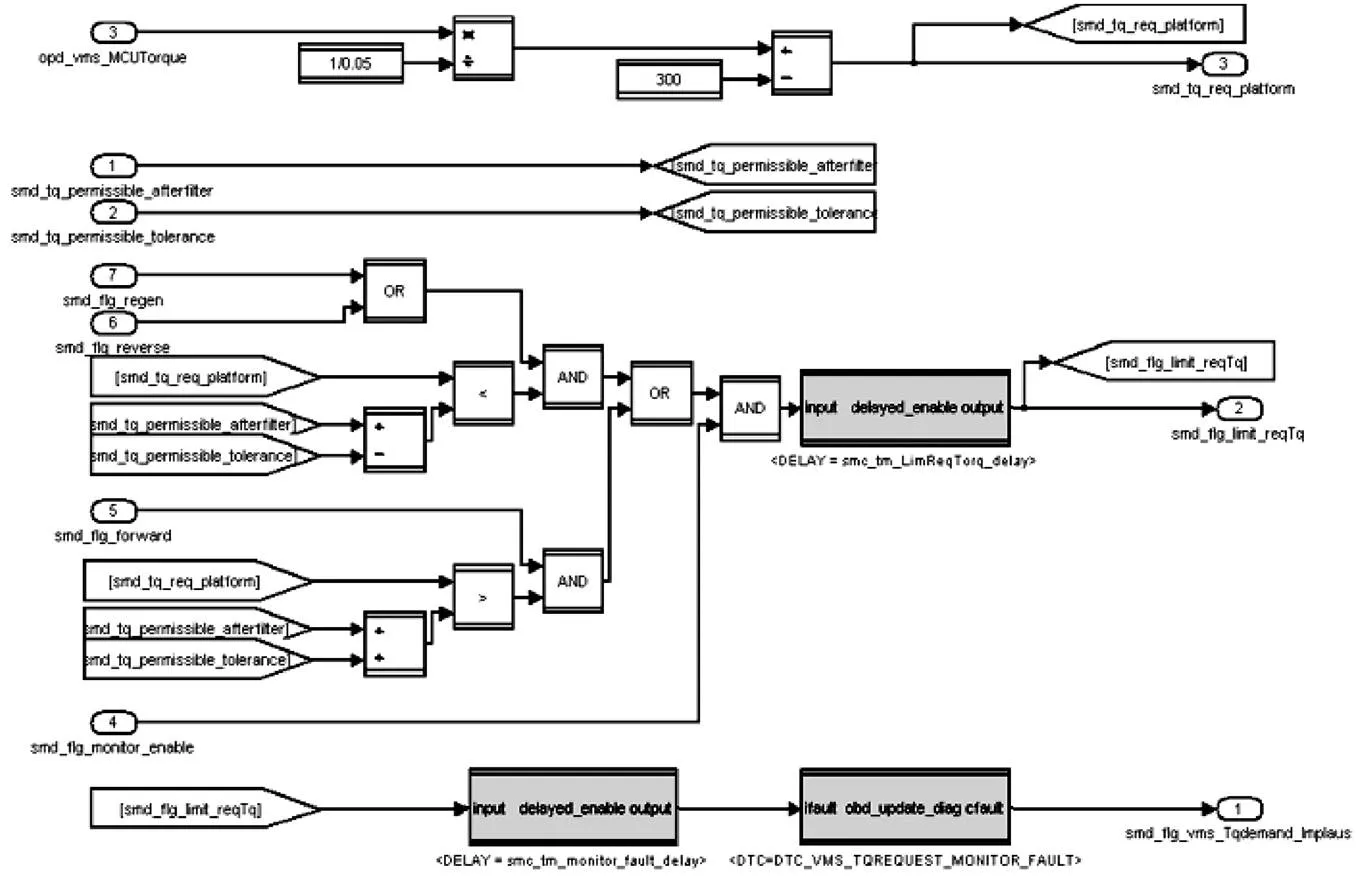
图6 驱动扭矩的滤波合成
4 扭矩监控仿真及实验结果分析
在CarSim软件中建立目标车辆的动力学模型,然后编译生成S-function模块,导入到Matlab/Simulink仿真软件中,与整车驱动扭矩控制模块、驱动扭矩安全监控模块一起,组成一个完整的整车扭矩监控仿真模型,图7为仿真模型的结构,图8为整车扭矩控制的仿真环境,图9为某一行使工况下允许扭矩与电机实际驱动扭矩对比图,其中黄色的线条为监控模块输出的允许扭矩,红色线条为实际输出的驱动扭矩,从中可以看出,在整个仿真工况内,实际输出的驱动扭矩均在允许扭矩的范围内。
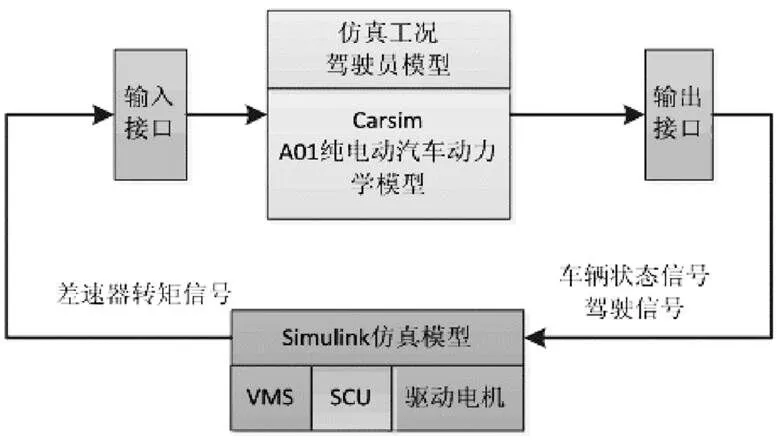
图7 整车扭矩安全监控仿真模型结构
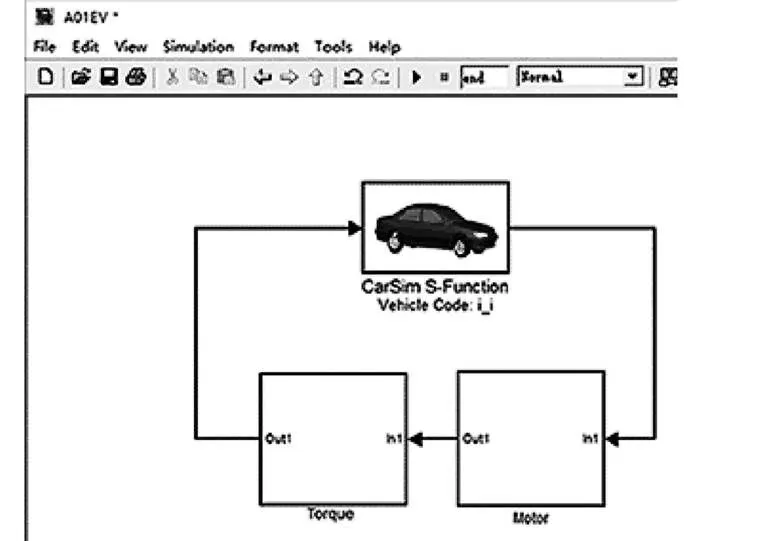
图8 整车扭矩安全监控仿真软件环境
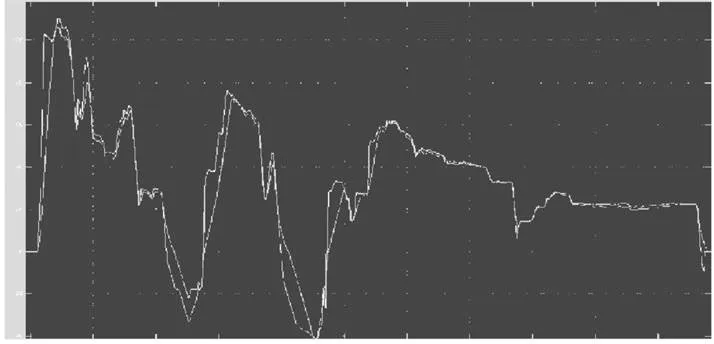
图9 某工况下允许扭矩与实际输出扭矩
图10为模拟车辆的电机输出扭矩控制出现异常,PI调节失效情况下,驱动扭矩安全监控功能的测试。图中显示,电机实际扭矩(绿色线条)持续输出,车速(红色线条)持续上升,车辆出现异常加速动作,且实际的驱动扭矩超出监控系统的允许扭矩(橙色线条),此时,扭矩安全监控功能发挥了期望的动作,发出了“电机扭矩的输出到0”的指令。图11是模拟制动能量回收工况下,制动回收扭矩监控测试,假定此时被测车辆电池组的SOC较高,且已经检测到某一电芯单体电压已达到3.7 V,允许回收扭矩为橙色线条,但此时整车的实际能量回收对应的电机扭矩为绿色线条,超出监控系统允许扭矩,经判定,扭矩监控模块发出“电机扭矩的输出到0”的指令。

图10 驱动扭矩监控测试
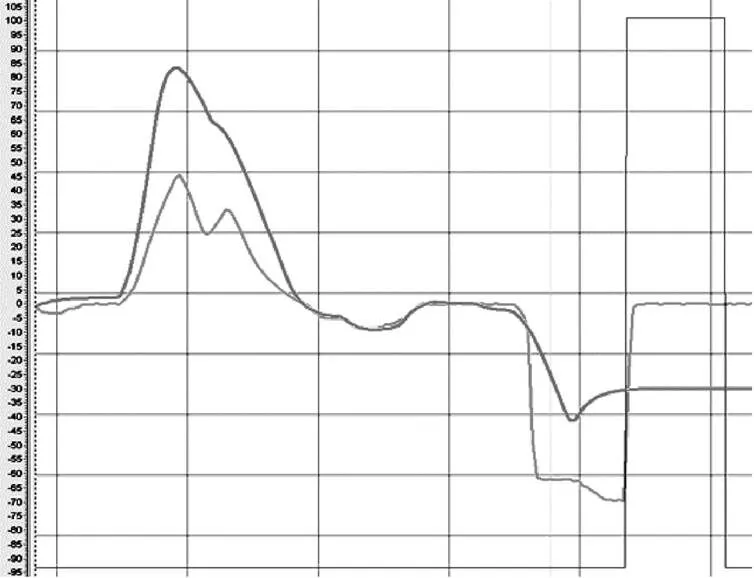
图11 制动回收扭矩监控测试
5 结论
课题组重点对整车控制系统控制中的驱动扭矩的安全监控进行了研究,通过模型分析、建模仿真,对所设计的控制方案、控制策略进行了验证,仿真结果符合期望要求,实现了所设计系统的功能。但也存在一些问题,对于整车的安全监控,其内容很多,如高压绝缘监控、电池包的热管理监控等,驱动扭矩的安全监控只是其中一个主要部分,还有众多的车载系统安全监控没有涉及。
[1] 王星刚.纯电动汽车驱动系统优化及分析策略[J].汽车与配件,2012 (50):30-31.
[2] 张永,龚春忠,张洪雷,等.基于动力性指标的纯电动汽车电机参数设计[J].汽车科技,2018(05):58-63.
[3] 王斌,林鑫焱,陈辛波,等.基于循环工况的纯电动汽车驱动电机参数优化[J].汽车工程学报,2015,5(03):165-171.
[4] 秦大同,王禺寒,胡明辉.考虑运行工况的纯电动汽车动力传动系统参数设计[J].重庆大学学报,2014,37(01):7-14.
[5] 胡明辉,谢红军,秦大同.电动汽车电机与传动系统参数匹配方法的研究[J].汽车工程,2013,35(12):1068-1073.
[6] 王峰,方宗德,祝小元.纯电动汽车新型动力传动装置的匹配仿真与优化[J].汽车工程,2011,33(09):805-808.
Optimization of Safety Monitoring Strategy for Driving Torque of Pure Electric Vehicle
LU Ruozhen, TIAN Yan, Gong Chunzhong
( Hozon New Energy Automobile Co., Ltd., Zhejiang Jiaxing 314500 )
The torque output capability of the driving system is a key indicator of the power output of new-energy vehicles. Abnormal torque output will lead to abnormal acceleration and deceleration of the whole vehicle, and even lead to dangerous consequences. Its safety monitoring is the highest safety level in the whole vehicle control. This paper introduces the strategy design and simulation of the torque of the pure electric car's driving system, which can make the vehicle more comfortable while ensuring the safety of the vehicle.
Drive torque;Safety monitoring;Simulation;Comfort
U469.72
A
1671-7988(2021)20-19-04
U469.72
A
1671-7988(2021)20-19-04
10.16638/j.cnki.1671-7988.2021.020.005
卢若振(1985.02—),男,本科,就职于合众新能源汽车有限公司,任项目总监,主要研究方向为新能源汽车整车开发管理。
猜你喜欢
汽车工程学报(2022年5期)2022-10-12
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
煤气与热力(2022年4期)2022-05-23
汽车实用技术(2022年2期)2022-02-21
智能建筑与工程机械(2021年6期)2021-09-10
汽车电器(2021年6期)2021-07-05
科技创新导报(2021年33期)2021-04-17