一种实时飞行视景系统的设计与实现
2021-11-17 06:09田海涛江彤阳桑德彬
计算机仿真 2021年4期
邹 莹,田海涛,江彤阳,桑德彬
(北京航天自动控制研究所,北京 100854)
1 引言
当运载火箭在典型动力故障的情况下,飞行轨迹会与无故障时的轨迹产生差异,严重的情况下会导致发射任务的失败,而当运载火箭控制系统具备故障辨识和控制重构能力时,控制系统会根据运载火箭飞行状态进行实时轨迹的重新规划,从而确保运载火箭发射任务的成功。由于故障辨识和控制重构的方案非常复杂,在半实物仿真和飞行试验过程中,有必要为研究人员在典型动力故障情况下的故障辨识与控制重构方案提供一种直观有效的分析手段。由于视景仿真技术在信息集成和展现方面的优势,因此将视景仿真技术与半实物仿真或飞行试验相结合,通过实时飞行视景系统能为复杂技术方案提供更为直观高效的分析手段。
通过视景仿真技术,研究人员更容易直观分析较为抽象的技术方案实现过程,对于运载火箭关键技术研究和武器装备研制阶段的性能改善都起到重要的作用[1]。实时飞行视景系统设计过程需结合应用背景和环境进行具体分析和设计。可以通过接收特征事件数据,触发特殊视点,为视角切换提供了技术参考[2]。在视景仿真系统中数据接收与转换处理也应关注其层次结构[3]。在视景仿真系统设计中,可以通过参数化的建模研究,通过提取可视化要素,并对要素进行参数化设计,从而达到简化系统设计难度的目的[4]。视景系统需要均衡融合后的数据信息,减少需要传输的数据量并得到最终显示时有效准确的信息[5]。目前,在航天三维场景仿真技术研究方面基于STK联合GIS数据构建的航天发射场三维视景仿真技术可展示飞行轨迹和时序动作,主要通过重放的方式对设计进行分析,无法解决实时飞行条件下轨迹差异的显示[6-8]。
本文提出的实时飞行视景系统将重点解决半实物仿真和飞行试验实时数据驱动下运载火箭飞行全过程可视化仿真、数据协议设计、轨迹差异化显示等关键技术问题。在有限数据下将运载火箭飞行过程中的复杂性信息高度融合和呈现,根据飞行试验现场控制系统重构方案的实施状态,为飞行试验提供判断、决策、现场指挥的重要依据。
2 系统主要难点
实时飞行视景系统主要有以下设计难点:
实时飞行视景系统应既能在半实物仿真环境下又能在飞行条件下运行。
首先,系统须具备全过程飞行场景的展示功能,根据任务需求进行三维可视化仿真,实现从飞行模式设置、起飞、飞行、故障注入、故障辨识、控制重构、飞行结束的全过程的场景展示。
第二,系统须具备关键时序动作展示能力,能够实现三维场景的加载、更新,基础空间环境的加载与显示、运载火箭加载与显示、关键动作显示、飞行轨迹显示、关机点时间、关机点速度、关机点位置等关键飞行数据的展示能力。
第三,系统须具备飞行参数的实时显示能力,能够通过二维可视化仿真通用显示模块,具备通过配置文件方式、网络通讯方式实现二维曲线展示,能够实现发动机故障状态、标准轨迹与规划轨迹差异的展示等。
第四,系统须具备与仿真系统实时通讯及数据交互的能力,能够适应以太网、反射内存实时网(VMIC)两种类型的网络通讯接口。同时系统具备离线数据回放功能,能够读取离线仿真数据文件,驱动场景运行。
第五,系统须具备运载火箭三维模型库管理能力,具备展示全任务剖面需要的三维模型库包括目标场景模型、地球模型、大气模型、特效模型等,通过各类型模型在不同阶段的组合和叠加,能够逼真模拟全过程飞行数据驱动下的视景仿真。
第六,系统须具备室内外视景仿真演示的能力,能够适应不同演示场地需求。
第七,系统须具备较好的人机交互能力,能够接受仿真调度指令,支持启动、终止视景仿真的能力,同时具备仿真对象模型切换显示、视角切换显示、镜头远近调整的功能。
3 实时飞行视景系统的方案
3.1 系统架构
在半实物仿真时,由仿真计算机进行箭体模型、发动机模型等计算,并将惯组脉冲通过RS422串口发送给飞行控制器,飞行控制器通过一路RS422串口,将标志字和飞行器状态信息发送给能力评估与决策计算机,能力评估与决策计算机以预先设定的目标点状态为终端条件,实时计算满足初始、过程、终端约束条件的控制指令,并将控制指令和规划标志字发送给飞行控制器,用于判断规划结果是否可用以及生成相应的推力幅值指令和程序角指令,飞行控制器通过硬件接口将发动机推力调节指令与舵指令发送给仿真计算机,由仿真计算机根据控制指令进行箭体运动方程计算,控制箭体运动生成惯组脉冲,由此构成一个闭合的仿真回路。飞行控制器通过无线通讯模块与地面站连接,主控计算机通过地面站无线通道完成飞行器测试、起飞控制和遥测数据接收。地面站计算机每200ms接收飞行控制器发送的遥测数据,并通过数据网络发送给视景系统计算机,视景系统最终通过两屏分别进行三维场景和二维曲线的可视化展示,从而构成闭合的半实物视景仿真系统。
在飞行试验时,飞行控制器每200ms通过无线数据链将遥测数据发送地面遥测计算机,并通过数据网络发送视景系统计算机,视景系统最终通过两屏分别进行三维场景和二维曲线的可视化展示,从而构成飞行视景仿真系统。
在半实物仿真状态和飞行试验两种状态下,实时飞行视景系统的工作方式及硬件系统连接一致。
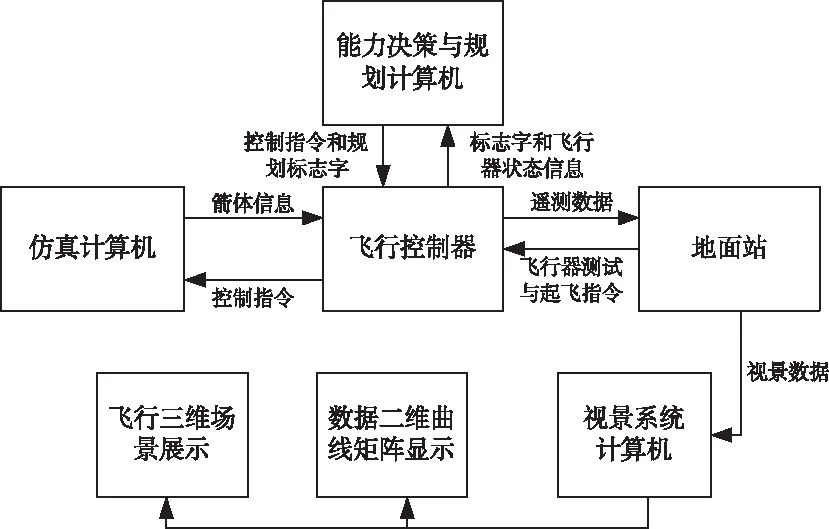
图1 视景系统工作原理
3.2 数据交互协议
为了能够使实时飞行视景系统具备全过程飞行场景展示能力,能够为研究人员分析控制系统重构方案的正确性提供直观的分析环境,能够为飞行试验现场指挥的提供重要实时依据,需要从大量试验数据和遥测数据中将关键信息进行选取,使控制系统故障辨识和控制重构过程相对复杂性信息能够通过三维场景和二维曲线进行直观可视化展示。视景系统驱动数据格式如表1所示。

表1 视景系统驱动数据格式

表2 视景系统故障信息注入数据格式
3.2.1 实时数据驱动
考虑到地面遥测计算机的信息处理能力,地面遥测计算机以200ms周期向视景软件发送视景驱动数据。当视景系统和地面站间通信采用以太网UDP协议时,字节序为小端模式,并禁止广播模式。地面测发控软件不进行数据重发,视景软件也不发送回令,但视景软件需校验测发软件数据的完整与有效性,若连续5帧数据均无效,视景系统提示通讯异常。
帧格式要求如表3所示。

表3 应用层数据报协议格式定义
发送顺序为从帧头到帧尾,其中:
1) 帧类型——2 字节,当前通讯规定周期数据类型为0x1222;
2) 数据区长度——2 字节,取值范围0~1024,一般不超过512;
3) 帧计数——4 字节,取值范围0~4294967295,帧计数从0 开始,除重发帧以外帧号加1,帧计数当达到4294967295 时重新从0 开始计数,帧计数不容许出现逆序的情况,接收方接收到相同帧类型号且相同帧计数的应用层数据报认为收到重发,将该应用层数据报丢弃,每一种帧类型号维护一个单独的帧计数;
4) 最大发送次数——1 字节,当前通讯下规定取值为1;
5) 当前发送次数——1 字节,当前通讯下规定取值为1;
6) 确认标识/接收状态——1 字节:当前通讯下规定取值为0;
7) 数据区——0~1024 字节。建议是不超过512 字节;
8) 校验码——2 字节,为帧除校验码以外的所有字节的CRC16 校验码,生成多项式为x16+x12+x5+x0,低字节在前。
当视景系统和地面站间通信采用反射内存实时网络(VMIC)连接时,由地面站发送的遥测数据写入反射内存卡指定读取地址,故障注入信息则由视景计算机写入指定发送地址,数据格式与以太网连接时相同。
3.2.2 离线数据驱动
在离线数据驱动模式下,视景系统读取指定路径下的txt文件,通过脚本控制数据加载、读取,并解析数据驱动场景运行。
离线数据驱动使研究人员可以对已经完成的飞行试验或半实物仿真试验进行再次演示和分析。当研究人员需要对试验结果数据进行多次分析时,可以采用离线数据驱动方式,并可以通过调节不同视角来辅助研究人员进行分析,通过离线数据驱动方式可以减少重复试验,从而提升试验效率。
3.2.3 数据处理
由于地面站数据发送的数据间隔为200ms,视景系统对于数据刷新频率约为50Hz左右,按照实际数据驱动会带来飞行器场景内跳动,影响视景展示效果,因此视景系统采用线性插值的方式,根据接收到的数据得到指定时间的位置、速度、姿态等数据,从而驱动视景运行。
3.3 软件设计
3.3.1 软件架构设计
视景系统按照系统功能可以划分为数据通信模块、场景模型、视景主控模块、视景驱动模块以及视景显示模块,软件架构如图2所示:
1) 数据通信模块
该模块实现与飞行仿真系统的数据通信,具备两种通信模式:以太网及反射内存实时网(VMIC),接收仿真数据,按照指定协议对数据进行解析并提供给主控模块,以驱动视景仿真显示。
2) 三维模型
主要负责建立整个虚拟场景,其中包括期发射场及周边模型、天空模型、气象环境模型、星空环境模型。
3) 实时视景仿真驱动
建立视景仿真系统,必须要有视景仿真驱动模块,该模块主要负责太阳、地球位置更新,飞行器位置、姿态更新,载荷位置、形态更新,特效生成以及视点切换等。
4) 视景显示输出模块
用3D的方式实时反映仿真输出,演示两种飞行系统对应的飞行器全过程全阶段的轨迹、姿态、任务执行等动作,同时显示故障注入、辨识、轨迹规划等过程,以及相应的特效,增强真实感。
5) 视景主控模块
该模块是整个视景仿真系统的控制核心和仿真引擎。负责加载模型和特效数据库;根据仿真数据确定模型的状态和特效触发;根据外部人机交互信息调整视景参数。同时进行场景渲染和仿真任务管理。
6) 人机交互模块
实现用户与视景仿真程序的实时交互。在仿真过程中,通过键盘和鼠标实时控制视点参数、跟踪对象和图形状态,显示统计信息等。
3.3.2 界面设计与实现
视景系统界面设计过程中遵循了可见性、可辨性、可知性的基本显示原则,充分考虑使用场景和环境因素,在均衡的认知负荷下结合项目需求和数据判读分析习惯进行设计。在界面布局上着重依据频度、重要性、归类性原则,着重在信息结构的可视化上进行整体规划。将需要界面化的过程信息予以设计交互,提供良好的人机交互界面,方便用户直接快速有效获取所需信息。由于控制系统故障辨识过程短,并且控制重构过程复杂,需要更加注重信息元素较多的情况下信息元素逻辑关系的关系紧密程度,注重了信息呈现的可读性,可理解性。
视景系统根据飞行过程设置了不同的观察视角,能够将故障注入(如图3所示)、辨识以及重构过程中的飞行轨迹变化能够清晰的呈现,在整体设计上采用了分屏(左屏+右屏)方式对飞行器飞行过程进行全程数据可视化仿真。左屏采用3D方式进行着重进行飞行轨迹绘制(如图4所示),将运载火箭助推器分离、一二级分离等关键动作通过左屏小窗内的运载火箭模型进行展示,界面中心显示不同视角下运载火箭理论轨迹、规划轨迹、实际飞行轨迹(如图5、图6所示),对于不同轨迹进行文字标识以及颜色标记,运载火箭发动机信息和箭体实时数据通过右侧动态数据区实时显示,通过底部进度条式显示给出当前关键时序名称及时间点(如图7所示)。右屏采用二维曲线绘制的方式对飞行过程运载火箭位置、姿态、速度、推力等数据进行可视化展示(如图8所示)。

图3 故障注入界面

图4 左屏显示

图5 故障辨识及轨迹规划过程中的轨道显示

图6 轨迹规划后的轨迹差异显示

图7 左屏关键时序显示

图8 右屏二维曲线显示
视景系统中观察点的选择是根据故障辨识及控制重构过程信息呈现的不同关注侧重进行了自动切换,有助于研究人员分析整个控制过程的实际效果和对控制方案进行改进。
4 结论
本文设计和实现了一种实时飞行视景仿真系统,该系统具备在半实物仿真或飞行试验两种条件下的实时视景仿真功能。实时飞行视景仿真系统采用Unity3d进行地球太空场景实现,采用3DsMax进行运载火箭模型开发。将遥测数据与基于三维Unity3d引擎相结合,使用遥测数据加以驱动。系统支持反射内存卡、UDP数据通信、离线数据三种数据通信方式。解决了运载火箭动力系统故障条件下故障注入、故障辨识、控制重构的整个控制过程的展示。相较传统的数据分析和二维曲线以及图表展示,实时飞行视景系统不仅能够实时分析飞行器的飞行状态、控制方案的效果,还可直观对控制效果进行分析评估,通过离线数据再现飞行及控制过程是传统判读及数据分析方法不具备的优势。实时飞行视景系统具备高信息集成度,可极大提升分析和评估的效率,为飞行器性能提升、故障分析和技术改进提供了全新的技术手段。
猜你喜欢
销售与市场(营销版)(2022年8期)2022-08-16
电脑知识与技术(2022年15期)2022-07-02
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
销售与市场(营销版)(2021年10期)2021-11-21
电脑爱好者(2020年23期)2020-12-30
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电脑爱好者(2015年5期)2015-09-10
恋爱婚姻家庭·养生版(2010年8期)2010-05-14
移动一族(2009年3期)2009-05-12