一种基于Daisy-chain的推力矢量协调控制方法
2021-11-17 07:08郭立志史静平
计算机仿真 2021年5期
郭立志,史静平
(1. 北京青云航空仪表有限公司,北京 100086;2. 西北工业大学自动化学院,陕西 西安 710072)
1 引言
传统布局飞机依靠副翼、升降舵和方向舵等各种气动舵面实现姿态及航迹的控制,但气动舵面在过失速飞行时气动效率很低,在改出失速状态时往往力不从心。为了解决这一问题,在飞机设计上迫切要求发展一种新的革命性手段,这就为在战机上应用推力矢量技术[1]提出了需求。推力矢量技术通过改变发动机喷气气流的方向来操纵飞机,弥补气动舵面在低速高迎角阶段的操纵效能成为先进战斗机控制的必备方案。
作为第四代战斗机的必备技术之一,推力矢量技术在先进战机上的应用带来了诸多好处。应用推力矢量技术可以使飞机可控飞行的迎角范围大大增加,最小飞行速度大大减小,突破了飞机“失速”的限制,使战机可以轻松实现过失速机动,从而使飞机机动性能获得质的飞跃[2]。此外,推力矢量技术还极大地提高飞机的敏捷性,如:减小最小转弯时间和战斗周期时间[3]等。采用推力矢量技术能够显著缩短战斗机最小转弯时间,使得战机能够满足率先攻击和连续攻击的要求,对歼击机实际空战的意义巨大。另一方面,战机具有推力矢量使得它的战斗周期时间大大缩短[4,5],使战斗周期对战机初始速度的依赖度明显降低,这主要是因为具有矢量推力后,战机的转弯速率不仅依赖于飞机的升力和发动机推力,而且还依赖于推力矢量的偏转角,也就是说,具有推力矢量后,飞机就能摆脱以损失动能换取转弯速率的缺陷,从而获得较高的敏捷性[6,7]。
至今为止,以美俄为首的世界航空大国陆续开展了飞机上应用推力矢量技术的研究,内容涉及:矢量喷管本身的设计试验、飞机大迎角稳定和操纵对推力矢量效能的要求、推力矢量技术对飞机性能、飞行品质的影响等。在推力矢量控制方面,相关资料表明:俄式先进战斗机推力矢量发动机的使用,是以飞行员手动操纵矢量操纵杆(额外增加)实现的;在这种情况下,如何将矢量操纵面纳入到飞控系统实现自动控制,从而减轻驾驶员的操作负担,成为一项待解决的重要工程问题。此外,推力矢量技术所依托的矢量喷管通常工作在高温状态,为了降低飞机维护成本并保护推力喷管,一般只在必须的情况下短时间使用,比如:做过失速机动、出现操纵面故障等,因此对于矢量操纵面的控制必须考虑“最小工作模式”。
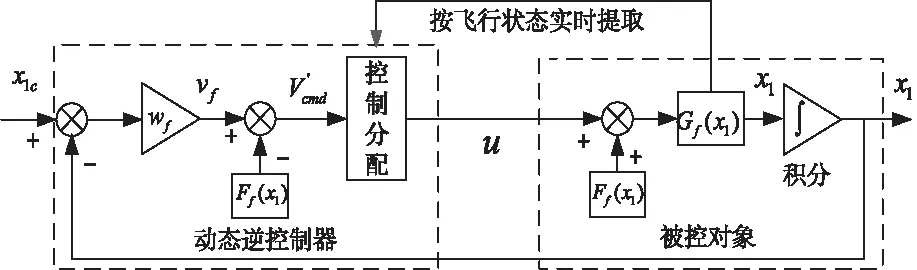
为了解决上述问题,本文提出了基于控制分配技术[2,8]的矢量操纵面协调控制方案。与传统的控制系统结构不同,如图1所示,多操纵面控制分配技术通过增加分配律模块,针对飞行员操纵力矩的需求利用飞机所有可用的气动操纵面和矢量操纵面进行分配设计,这种模块化的设计过程具有明显的优点,首先,如果要进行控制律模块更改或控制律参数调整,不影响分配模块;同样,分配模块的更改也不影响控制律模块。因此多操纵面控制分配技术十分有利于解决过失速机动飞行时操纵面的综合协调控制问题。
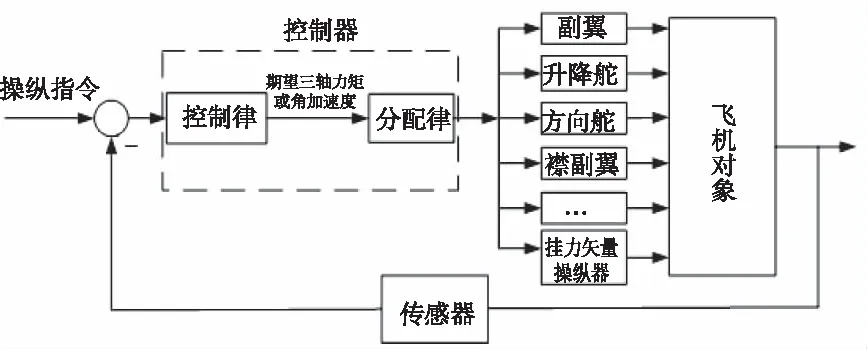
图1 多操纵面控制分配系统结构示意图
基于上述考虑,本文主要采用基于daisy-chain的控制分配方法[9-10]针对推力矢量操纵面与气动操纵面协调控制方法开展研究,主要研究目标有二:一是通过控制分配技术实现矢量操纵面与气动操纵面的协调控制[11],从而减少矢量操纵杆,减轻驾驶员负担;二是通过串接链分配策略实现最小推力矢量工作模式,以降低飞机发动机维护成本。
2 推力矢量飞机模型描述
本文采用美国F-16MATV飞机CFD模型开展研究工作。F-16 多轴推力矢量计划(MATV)是由美国通用电气和通用动力发起的研究项目,其目的在于为F-16战隼研制推力矢量喷管。推力矢量技术是一种先进的发动机控制技术,它通过改变发动机尾部喷流的方向,提供俯仰、偏航和滚转力矩以及反推力,从而可以获得额外的操纵力和操纵力矩。下面对推力矢量操纵面所产生的操纵力矩计算方法进行描述。
飞机的运动主要表现为纵向速度及三个姿态角的变化情况,对飞机的操纵,主要依赖于发动机推力、飞机的气动舵面以及喷管在两个方向的偏转量。各舵面的限制如表所示。
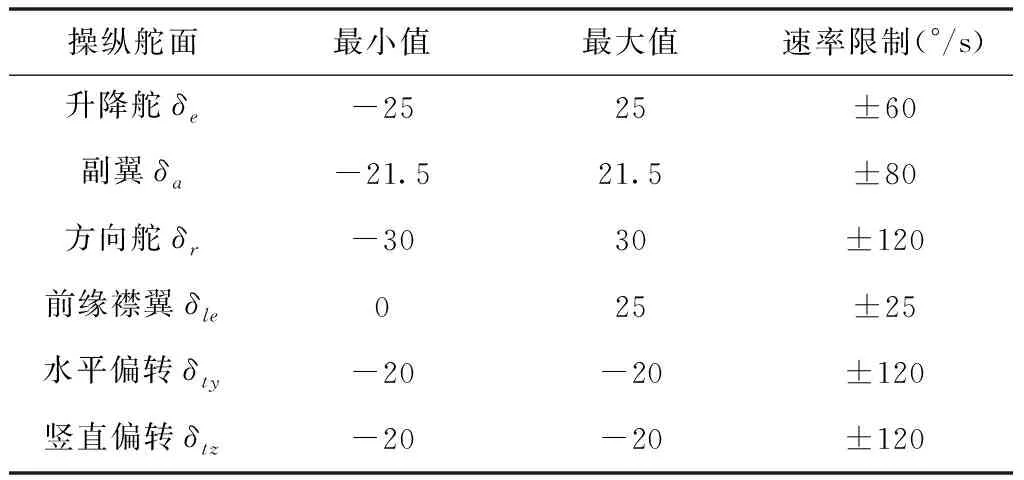
表1 F-16各操纵舵面约束


图2 轴对称矢量喷管三轴力与力矩折算

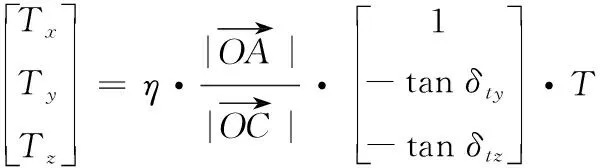
(1)
又

(2)
所以有

(3)
同理,设发动机喷口推力作用点为o.e,飞机重心为o.g,考虑当前飞机对象为单发战机,按照合理的配置,现可设纵向距离为xeng,侧向距离为yeng,竖直距离差为zeng。结合图2(b),可以计算推力矢量附加的三轴力矩为(单发飞机yeng通常为0):

(4)
推力矢量技术的引入使得战机能够较为轻松地进入低速、大迎角的传统“飞行禁区”,大迎角情况下的气动特性非线性、惯性耦合等因素使得基于线性化小扰动飞机对象设计的常规飞行控制律控制效果恶化,甚至不能保证整个飞行控制系统的稳定性。为保证飞机大迎角下的稳定性和过失速机动的实现,采用非线性控制策略是必然的趋势。多年来,对非线性系统的分析和控制方法的研究一直是控制领域的研究热点,当下非线性系统的主要分析方法有李雅普诺夫方法、相平面法、描述函数法等等,而主要的非线性控制器设计方法包括自适应模糊方法、滑动模态方法、非线性动态逆方法等等。鉴于非线性动态逆方法的一阶微分函数描述形式同飞机模型十二个状态方程之间的联系,本文将在描述大迎角情况下普遍存在的多种非线性运动模态之后采用该方法为矢量推力飞机设计能满足超机动飞行的非线性控制律。
3 基于非线性动态逆方法控制律设计
采用非线性控制策略是解决过失速机动控制问题的必由之路,其中的非线性动态逆方法是解决这类问题的有效途径。动态逆方法能使非线性和线性兼容,通过进行通道间的解耦,避开了繁琐的增益调节环节,并且,被控对象自身参数的改变不会影响其线性解耦控制结构及增益,是一种通用的控制策略和方法。
动态逆方法对于飞行控制系统的设计围绕快变量和较慢变量进行,即x1=(p,q,r)和x2=(α,β,μ)两组变量。奇异摄动理论指出,当系统的两组状态变量的响应速度之间相差超过3~5倍时,可以将这两组变量按照不同的时间域进行处理,即:由内到外,逐个回路进行控制律设计,这样可以将全系统的动态逆设计分解成若干子系统的动态逆设计问题,使得非线性动态逆方法适用于飞行控制系统的设计。根据现代战斗机的一般规律,在变化速度上,x1比x2快4~5倍,每组状态的变化具有不同的时间尺度,因此可以分别对各组状态构造逆系统,组成相应的控制回路,不同的回路带宽不同,并且带宽由特定飞机的特性决定。本文中(p,q,r)回路的带宽选为10rad/s,(α,β,μ)回路的带宽选为3rad/s,相邻回路间带宽相差超过4~5倍,这在工程角度上满足时标分离的条件。
3.1 快回路控制律设计
飞机的快变量直接受到操纵面的控制,因此将其作为控制律的内回路。通常情况下,可以将x1的微分方程写成如下仿射非线性系统的形式:

(5)
方程右端第一项表示非线性耦合力矩,第二项表示舵面产生的操纵力矩。式中:

由动态逆方法,令快回路动态逆控制律为

(6)
综上,快回路的结构图如图3所示。
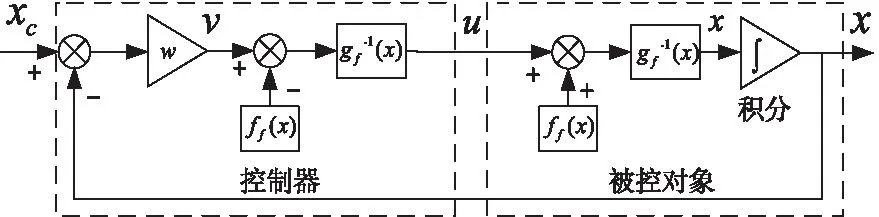
图3 快回路结构图
根据飞机短周期运动模态、滚转模态、荷兰滚模态的特点,设快状态子系统滚转角速率期望的闭环动力学系统为一阶环节,俯仰角速率和偏航角速率期望响应为二阶环节即

(7)
3.2 较慢回路控制律设计
现代先进战斗机的纵杆、侧杆、脚蹬指令构型往往对应于飞机的α,β,μ状态量,因此较慢回路动态逆设计选择α,β,μ作为控制变量。较慢回路的输入为杆指令αc、βc、μc,其输出将作为内回路控制器的输入信号,即pc、qc、rc,。将较慢状态变量x2的微分方程整理成如下仿射非线性系统的形式

(8)





因阻尼力的影响很小,可以忽略不计,故

在进行较慢状态变量的控制时,根据奇异摄动理论,可以认为较慢状态控制开始作用时,快回路的动态过程已经结束并进入稳定状态,此时满足p=pc,q=qc,r=rc,即:认为较慢回路的输出作为快回路对象的输入时,其值始终为快回路的稳态值。如果考虑快回路的动态过程,那么在指令发生变化的起始阶段并不满足p=pc,q=qc,r=rc,而是经过一定的过渡时间后才成立的。这个过渡时间由快回路的带宽决定,快回路的带宽往往是较慢回路的3~5倍。与较慢回路相比,快回路的时间常数足够小,其动态过程和较慢回路的过渡过程相比很迅速,这种情况下忽略快回路的动态过程是完全合理的。
设较慢状态子系统期望的闭环动力学系统为一阶环节,即

(9)
本文选取ωα=ωβ=ωμ=2rad·s-1,综上应用非线性动态逆求得快回路的指令信号为

(10)

图4 较慢回路结构图
3.3 基于Daisy-chain的矢量操纵面控制分配设计
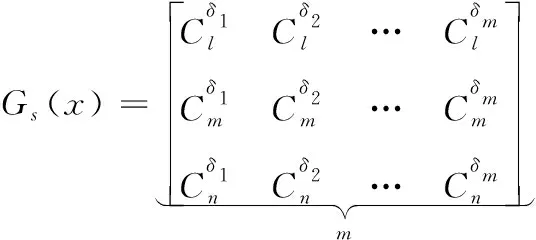
飞行控制系统的控制分配问题可描述为:对于给定的虚拟控制量vcmd与控制输入u到虚拟控制量映射g:Rm→Rk(m>3),求解不定方程g(u)=vcmd,并使u满足期望性能指标;而对于线性控制分配问题,这一过程应可以描述为以下线性关系
Gs(x)·u=vcmd
(11)
式中,u为飞机操纵面输出值(u:m×1,msf为操纵面数量);虚拟控制量vcmd∈R3,一般为三轴通道的操纵力矩偏差;Gs(x)为控制效能矩阵,其构成元素为状态取x时各操纵面对应通道下的力矩操纵系数,且矩阵Gs(x)秩为3。
(12)


(13)
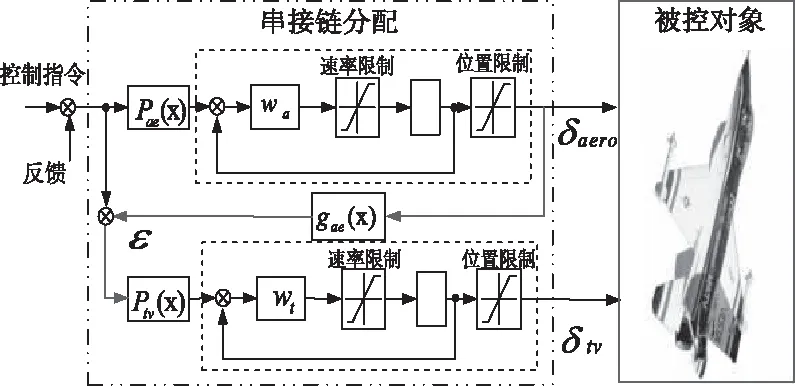
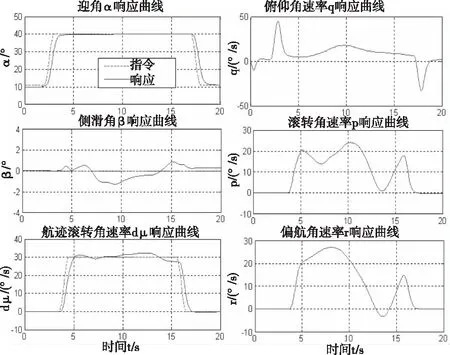
其中,Ff(x)为部分非线性项,Gf(x)为部分控制项,且rank(Gf(x)) (14) 图5 非线性动态逆(快回路)与控制分配关系 采用串接链分配方法进行控制分配律设计,按照气动舵面分配优先级高于矢量舵面的原则,控制输入被划分为2组 (15) 对应的广义效能矩阵也被分为两组 (16) 串接链分配方法在分配过程中优先使用气动舵面,并使其在不超过位置及速率限制的前提下尽可能满足 gae(x)uaero=vcmd (17) 采用伪逆法求解上式得到: uaero=gae(x)+vcmd=Pae(x)vcmd (18) 若上式求解得到的uaero在气动舵面的位置、速率限制内,则分配过程完成,算法终止;若uaero达到气动舵面饱和限制,则加入矢量舵面补充分配误差: uaero=satuaero(Pae(x)vcmd) utv=satutv(Ptv(x)(vcmd-gae(x)uaero)) (19) (19)式当中,sati()为对应舵面组的位置与速率限制,Ptv(x)为gtv(x)伪逆阵。串接链分配算法的结构可由图6表示。 图6 推力矢量飞机中的串接链分配法 相比于伪逆或加权伪逆法,串接链分配法最大限度地利用了气动舵面,减小了矢量舵面的使用时间,属于非全时间联动方式。 综合动态逆方法的控制律设计步骤,建立飞行控制系统Matlab的Simulink模型如图7所示。 图7 控制系统结构图 采用矢量滚筒机动进行大迎角动态逆控制系统的有效性测试。矢量滚筒机动的简化示意过程如图8所示,实施时:飞行员首先拉杆保证飞机快速进入过失速阶段;待战机保持以较大迎角稳定飞行的情况下,再通过操纵侧杆使飞机进入绕速度矢滚转状态。在滚转的过程当中,考虑到飞机重力和升力在平衡与不平衡之间连续转化,战机的飞行轨迹将呈现出类似于紧贴圆筒外壁螺旋前进的状态,另外,在攻角较大的情况下,战机绕速度矢滚转能够使机头扫过很大的前向面积,这使得机载雷达拥有了更大的侦测范围。目前,美国的F-22及俄罗斯的Su-35均能完成这一机动。 图8 “矢量滚筒”机动示意图 图9 矢量滚筒机动指令的状态响应曲线 图10 矢量滚筒机动的操纵面响应曲线 本文提出了一种基于控制分配技术的动态逆设计方法,该方法将矢量操纵面纳入到飞控系统实现协调控制,从而减少了矢量操纵机构、降低了驾驶员的操作负担。基于串接链分配法的矢量操纵面分配模式最大限度地利用了气动舵面,减小了矢量舵面的使用时间,因而能有效降低发动机的维护成本。而基于矢量滚筒的机动控制仿真,有效验证了这种方法在过失速机动时对于矢量操纵面协调控制的有效性。




4 矢量滚筒机动仿真




5 结论
猜你喜欢
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
西部论丛(2020年2期)2020-10-21
劳动保护(2018年5期)2018-06-05
新高考·高一物理(2016年1期)2016-03-05