列车常用制动控制故障诊断与优化分析
2021-11-27 12:16臧伟
新视线·建筑与电力 2021年6期
臧伟

摘要:论文对地铁车辆常用制动控制进行了研究,重点分析了信号系统和网络系统对列车常用制动的控制原理及逻辑。并结合实际故障对控制线路提出优化建议,确保常用制动控制更加安全可靠。
关键词:制动控制;制动列车线;ATOBR
1 引言
在地铁运行过程中,制动系统是其必不可少的关键性组成要素,关乎地铁的稳定运行和乘客的出行安全。地铁列车制动功能包括了常用制动、紧急制动、保持制动和停放制动等,主要采用电-空混合制动的方式。常用制动又分为电制动和空气制动,由列车制动系统和牵引系统协同控制完成。常用制动的施加缓解可由信号系统和网络系统分别控制,两者之间既有关联,又存在不同。
2 常用制動控制基本概述
常用制动是在正常条件下施加的制动,常用制动采取电制动和空气制动混合施加的方式,混合施加时,电制动优先,不足的部分由空气制动随时进行补偿。ATO模式下,列车在ATC系统的控制监护下自动驾驶,无需人工操作。此模式下,ATC将牵引制动力需求值通过MVB接口传给列车控制单元VCU,经过网络解析后传送给牵引、制动系统。在人工模式下主控制手柄拉向制动,司控器输出一定的模拟量通过输入输出设备RIOM传给VCU,VCU将该模拟量转换为制动力参考值并计算出整车制动力。特殊情况下,如果列车网络故障,列车进入紧急牵引状态,此时列车的常用制动将由纯空气制动系统施加。
3 控制原理分析
3.1现有信号与车辆关于制动输出执行方案
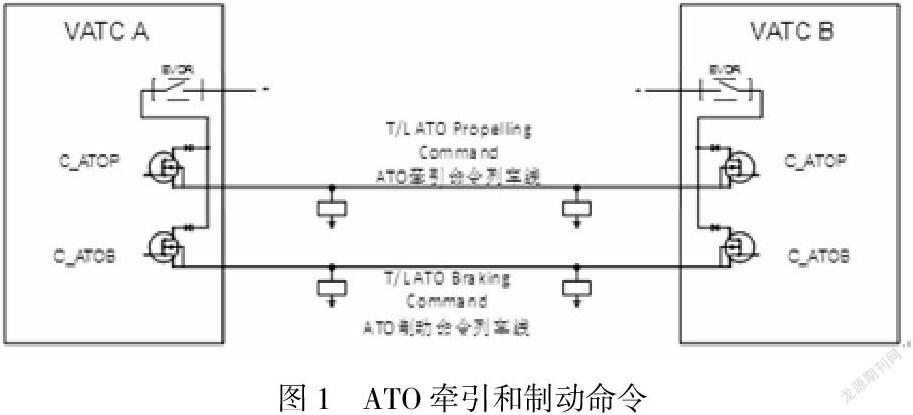
根据目前执行的方案,在ATO驾驶模式下,“Brake Output Status 制动输出状态”(图1)本身只是一个状态反馈,不是一个控制命令信号,车辆 TCMS 对此信号为仅做状态监控,信号输出的制动指令通过硬线给出。
3.2制动列车线电气控制的理解
根据电路设计逻辑,制动列车线得电制动缓解,失电制动施加。参照图2牵引制动控制原理图,红色线为ATO驾驶模式电路走向,绿色线为手动驾驶电路走向,控制原理分析如下:
(1)ATO模式下列车牵引工况下,110V电压经过MCCB的1、2触点,ATOMR(信号ATO模式继电器)的7、5触点,ATOBR(信号ATO制动继电器)的A3、A2触点到达制动列车线,使得制动列车线处于带电状态,列车不施加制动指令。制动工况下,列车两端ATOBR同时得电,两端ATOBR的A1、A2触点闭合,A3、A2触点断开,制动列车线失电,列车施加制动。
(2)手动驾驶牵引工况下,110V电压经过MCCB的1、2触点,KBS的11、12触点,司控器手柄处于非制动位,激活端的COR15/COR1的触点(两者冗余),ATOMR的6、10触点,到达制动列车线,使得制动列车线处于带电状态,列车不施加制动指令。在制动工况下,司控器处于制动位,制动列车线失电,列车施加制动。
(3)制动列车线贯穿全车,将指令分别传达给TCMS、牵引、制动控制系统,从而执行相关指令。
4制动控制回路诊断故障的方法分析
在实际运行时,ATO控车工况下,制动过程中会出现制动列车线瞬间异常,导致制动失效问题,尤其是ATOBR、ATOMR继电器,在制动列车线中串接会因为触点偶发性粘连导致故障。此类故障严重影响运营安全,且涉及信号和车辆两个专业,对于这类故障如何诊断及解决,对于运营单位来说极为重要。
4.1故障分析
根据图2电气原理图,造成制动失效可能原因有两种:一是激活端的ATOMR的触点异常,由正常状态的4-12闭合变成4-14闭合,110V直流电压经司控器后,通过COR15/COR1的触点,使得制动列车线瞬间得电;二是列车某一端ATOBR的触点异常,由正常状态的4-12闭合变成4-14闭合,110V直流电压经MCCB后,通过ATOMR的6-8触点以及ATOBR的4-14触点,使得制动列车线得电。以上两种可能性均会导致制动过程中制动指令跳变,制动无法施加。
4.2故障诊断
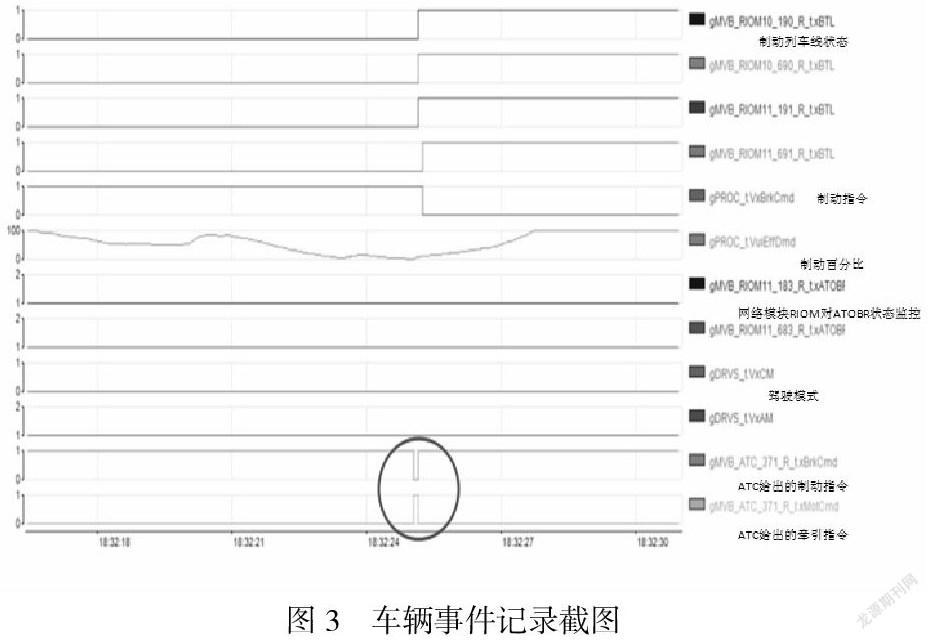
在故障发生时,可以借助车辆事件记录数据,对故障进行进一步诊断。根据信号接口协议,ATO控车情况下,车辆TCMS对制动指令是能进行状态监控,同时牵引制动指令也是ATC通过MVB网络给出的。所以我们能通过车辆事件记录数据中MVB网络收到的“牵引指令”、“制动指令”,并结合RIOM对ATOBR、ATOMR触点的监控状态进行对比分析对故障进行判断。
结合故障案例,对故障进行进一步诊断。通过图3车辆事件记录截图,可以看出在18:32:25分,ATC通过MVB网络给出了分别发出了牵引、制动指令,而此后制动列车线BTL状态却没有随着制动指令的施加而变化,状态维持在了制动缓解状态。因为ATO发出牵引制动指令过程中,ATOBR继电器状态是要发生变化的,所有可以断定为ATOBR继电器发生了故障。另外过程中RIOM对ATOBR继电器状态监控未发生变化,可以进一步明确是制动列车线回路ATOBR动作过程中继电器触点发生了粘连。
5 制动控制回路故障的处理对策
在车辆制动列车线中,仅接入了一组ATOBR继电器触点,ATC通过控制此触点的通断来施加和缓解常用制动,而ATOBR继电器为非安全继电器(信号常用制动为非安全命令),一旦接入车辆制动列车线的ATOBR继电器触点发生单点故障粘连,将造成严重影响,运行过程中将导致ATO模式无法使用。针对此问题,分别从日常检修及优化电路控制两方面制定了以下预防对策:
5.1定期检查
针对电路中关键继电器粘连问题,一方面是加强继电器外观检查,定期对继电器触点进行检测,同时结合运行情况,统计出继电器动作次数,在机械、电气动作次数寿命到限前进行更换;另一方面加强电路电流的检测,以防冲击电流过大导致继电器触点发生故障。针对制动列车线,对其工作电流理论值进行了计算:27 mA *2(2个BDR继电器)+1 mA *4(4路网络监控)+7.5 mA *4(4节车牵引)+1 mA *6(6节车制动)=94mA,现场实测制动列车线在制动指令切换瞬间电流为 87.5mA。
5.2优化建议
针对制动命令硬线中仅接入一组ATOBR继电器接点,存在ATOBR继电器接点粘连后,AM模式无法正常施加常用制动的故障隐患。针对此问题,主要有以下两种优化方案:
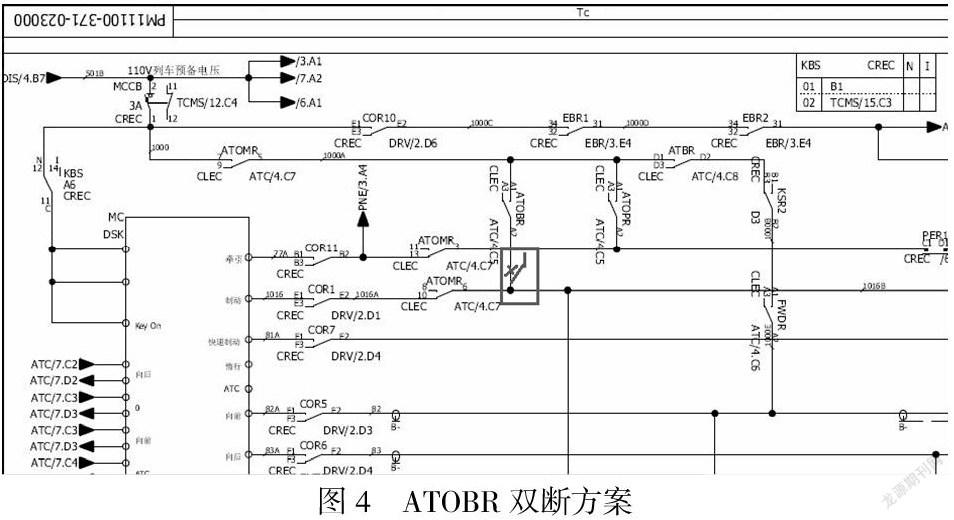
方案一:可在电路中增加串联 ATOBR 继电器的另一组触点,形成“双断”方式。
此方案改造较为容易,可以提升一定程度的触点分断能力,提高电路稳定性,但是仍然可能出现两组触点同时短暂性的粘连的情况,无法彻底解决故障问题。
方案二:采用车辆 ATC 发送给 TCMS 的通信数据流中的“Brake Output Status制动输出状态”作为制动指令。在ATC控车下,TCMS不仅作为状态监控,也参与判断。当TCMS接受到制动硬线指令和网络指令不一致时,以TCMS网络为主,该方案改动较大,需要重新制定接口协议。且需要进一步评估硬线信号和网络信号的稳定性和安全性。
6 结语
列车制动系统是行车安全的重要保障,常用制动作为制动系统的重要功能之一,其运行是否可靠将直接影响列车行驶的安全性,因此有必要对地铁列车常用制动控制进行深入研究。随着无人驾驶技术的不断发展,常用制动的控制必将更加关键和重要,这样才能确保乘客的安全出行和乘车体验。
参考文献:
[1]胡志雄. 制动电气控制技术规范.南京:中车南京浦镇车辆有限公司,2017