
基于激光雷达的赛道识别系统研究与设计
2021-12-17 01:46张博雨毕栋代家喜程昊然
科技信息·学术版 2021年1期
关键词:激光雷达
张博雨 毕栋 代家喜 程昊然



摘要:针对激光雷达地面分割难以解决实时性、准确率兼顾的问题,设计了一种多线激光雷达的赛道识别系统。首先对原始点云使用直通滤波截取点云的感兴趣区域提高后续模块的处理效率,地面分割部分使用改进后的随机一致性采样(random sample consensus,RANSAC)算法剔除地面点云,最后使用欧式聚类并对其结果进行后处理。试验结果表明:与传统的RANSAC地面分割方法和欧式距离聚类相比,改进后的地面分割方法能够更快速准确地将地面点剔除并达到实时性要求,欧式距离聚类后处理可将非锥桶障碍物剔除。
关键词:随机一致性采样;激光雷达;锥桶检测;欧式距离聚类
在中国大学生无人驾驶方程式大赛(FSAC)中激光雷达检测周围环境中的障碍物传递给下游任务完成指定赛道中的无人驾驶功能。本文中使用激光雷达设计并实现一种室外锥桶检测算法,为了保证室外场景下数据处理的实时性和锥桶识别的准确率,该算法中使用一种改进后的RANSAC算法和聚类后处理算法。
1 系统处理流程
1.1 滤波
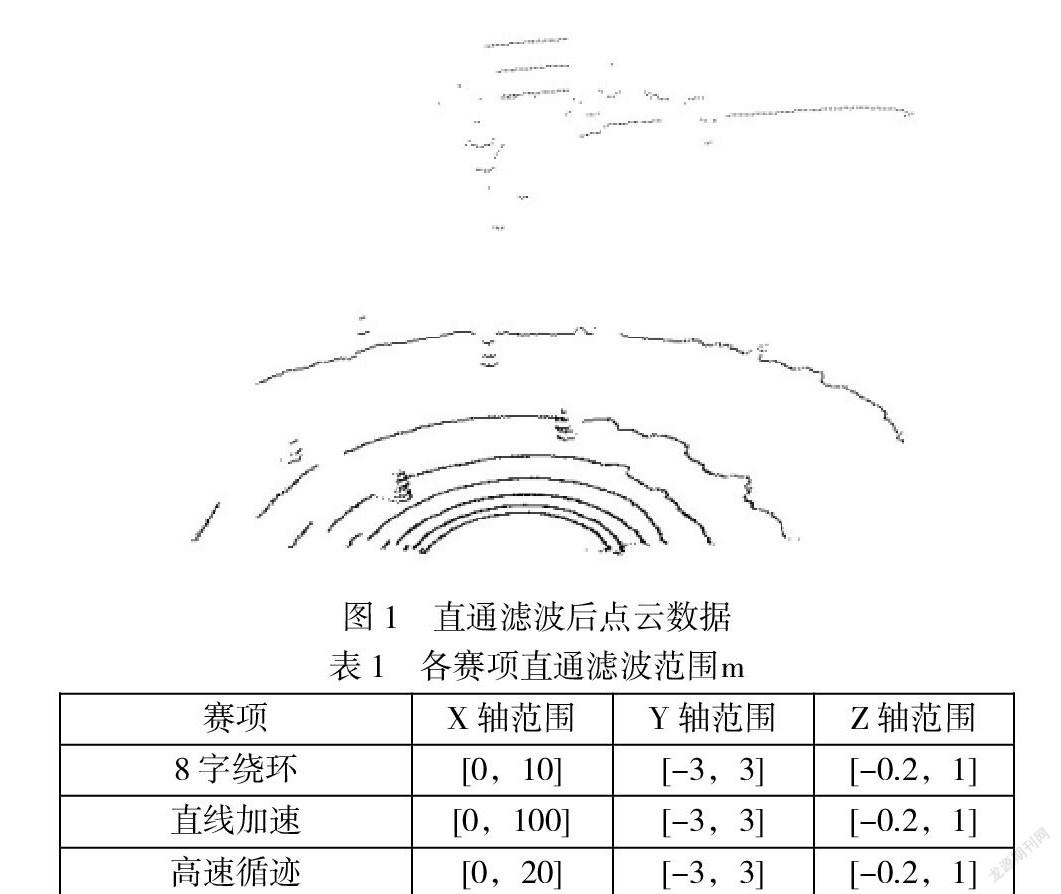
滤波在激光雷达的应用中是根据特定场合设定点云的有效范围过滤掉无用的点云数据,保留点云的感兴趣区域。设置点云的有效范围可以提升后期地面分割与锥桶障碍物聚类的效率。
在FSAC中賽车需要完成八字环绕、直线加速、高速循迹等动态项目。在本文中,我们选择了激光雷达点云库(PCL)中的直接通滤波方法,对激光雷达扫描的点云数据的各个轴进行不同范围的过滤。根据比赛经验和赛道特点,当激光雷达安装在离地面0.2米处时,每场比赛的过滤范围如表1所示,直接过滤后的点云数据如图1所示。
1.2 改进后的RANSAC算法
改进算法的原理是利用激光雷达的安装位置和地面高度快速找到真实的地平面,过滤掉不可能的多余点,从而找到一些与拟合平面I距离在阈值范围内的点,即地面点,并将点数最多的点集作为地面剔除点集。点数最多的点集被用作平面拟合点集。这就避免了为那些不可能的地面点计算拟合平面。另外,赛场上真实地面的法向量应与激光雷达安装位置的Z轴基本平行。
式中:P为点(X,Y,Z)到所拟合的平面的距离;(P,P,P)为所找最佳平面的法向量,P为模型局内地面点集;D为局外点到拟合平面I的距离阈值。通过模型得到3点拟合平面I后,将符合阈值范围内的局外点加入地面点集P中。
由于拟合平面I的点与真实地面点接近,可以减少处理点云数据时的迭代次数,提高计算效率,得到地面剔除后的点云数据,如图2所示。
1.3 欧式距离聚类算法及后处理
在FSAC赛场中唯一的障碍物是锥桶,在直通滤波后紧接着使用改进后的RANSAC算法去除地面,以减少点云。锥桶的点云具有密集的分布,可以用欧氏距离聚类算法进行聚类。障碍物被组合成包含锥桶和非锥桶障碍物的集群,然后使用下面描述的聚类后处理立即丢弃非锥桶障碍物。
FSAC赛道上的圆锥桶有一定的尺寸:小桶长宽20厘米,高30厘米;大桶长宽35厘米,高70厘米。聚类结果根据锥桶的大小进行处理,只保留有效的锥桶聚类。
获得每个集群点云中三个轴的最大值和最小值,这相当于用一个外围的边界盒来包围锥桶障碍物。计算每个聚类点云中各轴的最大值和最小值之间的距离,并写成X,Y和Z,以确定该距离是否与锥桶的大小相对应,以决定是否保留该聚类。
因为激光雷达扫描的锥形桶不一定是正面的,再加上点云扫描时的一些噪声。所以、轴距离阈值设置为X和Y。
2 试验
试验在8字绕环上录制了500个PCD点云数据,直线加速上录制了322个PCD点云数据。随机取193个用于测试,模拟8字绕环赛道如图4所示。
图5中显示了优化前后RANSAC算法的IoU交并比(Intersection over Union)准确率,通过对193个PCD文件计算出的IoU(公式5)取平均得到优化前RANSAC算法mIoU为88.27%,优化后RANSAC算法mIoU为91.31%。
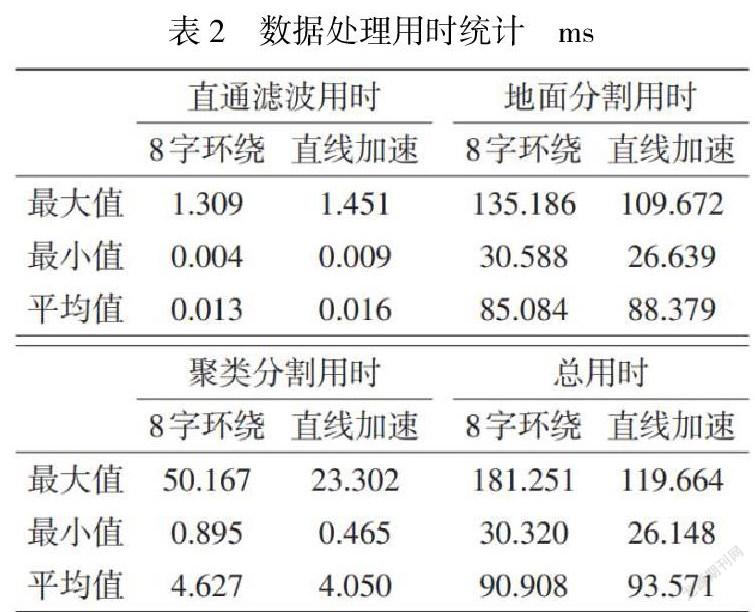
为了测试整个数据处理流程是否满足实时性要求,对点云预处理、优化后地面分割以及聚类分别进行用时统计,如表2所示。
通过表2可以看出,地面分割算法对比于其他算法平均计算时间最长(85.083510 ms),对于使用激光雷达检测锥桶障碍物来说可以满足实时性要求。
3 结论
本文设计了一个基于激光雷达的轨道识别系统,并优化了RANSAC的地面剔除算法。实验结果表明,该轨道识别系统可以满足实时性要求,并可以为赛车避障的后续处理节省时间。
参考文献:
[1]杨洋,张永生,马一薇,等.基于扫描线的车载激光雷达点云滤波方法[J].测绘科学技术学报,2010,27(3):209-212.
[2]许志勇,严尉剑.基于激光雷达点云的滤波算法研究[J].信息通信,2018,31(2):80-82.
[3]张振华.基于激光点云数据的障碍物检测算法研究[D].济南:山东大学,2020:51-53.
基金项目:大学生创新创业训练计划项目:DC2021110
作者信息:张博雨,男,2000.10.28,河北沧州,湖北汽车工业学院本科生。
猜你喜欢
汽车观察(2022年6期)2022-07-03
股市动态分析(2022年1期)2022-01-12
计算机应用文摘·触控(2021年22期)2021-12-13
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
财经(2021年2期)2021-02-07
计算机与网络(2020年19期)2020-12-04
中国计算机报(2020年33期)2020-09-13
中国电子报(2020年3期)2020-03-26
汽车观察(2019年6期)2019-07-30
