翼型激波抖振的无模型自适应控制
2022-01-06 09:11高传强张伟伟
空气动力学学报 2021年6期
任 凯,高传强,*,张伟伟
(1. 西北工业大学 航空学院,西安 710072;2. 流体力学智能化国际联合研究所,西安 710072)
0 引言
流动控制的目的是通过应用合适的执行机构来实现某种随时间和空间变化的期望目标函数[1],目标包括减阻[2]、减振[3]、噪声抑制[4]等。流动控制通常分为被动控制和主动控制。被动控制的设计和制造成本低,但一经设计制造完成,便不能根据系统所处环境的变化进行调整,因此它的缺点是可能会对非设计状态的流场带来不利影响,而且对不稳定流动的控制作用有限。主动控制通过在主流中直接注入合适的能量,与主流耦合来达到控制目的[5]。主动控制通常根据是否含有反馈回路分为闭环控制(也被称为反馈控制)和开环控制。开环控制指控制系统与被控流场之间只有正向作用没有反向联系的控制过程,其控制信号往往是预先给定的,显然没有充分利用主动控制能对流动变化作出响应的潜力;而闭环控制利用流场与期望流场的偏差进行反馈,实时计算控制量,通常能够以较小的能量消耗获得最优的控制结果。
目前大多数的闭环流动控制都属于基于模型的控制(model-based control, MBC)方法,如抑制钝体后缘的不稳定涡脱[6-7]、控制空腔中的不稳定流动[8-9]、抑制跨声速抖振中的脉动载荷[10]、湍流转捩控制[11]等。但由于流动环境中不可避免地存在扰动,这会导致流动状态发生改变,流动系统的数学模型也会发生改变,这就需要重新建立其数学模型,给控制工作带来难以预计的困难,因为复杂流动的降阶与建模本就是流体力学领域极具挑战性的课题。而采用数据驱动的自适应控制,可以摆脱控制器设计对被控流动系统数学模型的依赖,进而也避免了上述与建模相关的难题。数据驱动控制(data-driven control,DDC)[12]是指控制器设计仅利用被控系统的输入/输出数据,而不显含其数学模型的控制方法。数据驱动的流动控制方法已经逐渐成为流动控制领域的研究热点[13-15]。
为了避免遇到基于模型的流动控制中的问题,本文以激波抖振流动为对象来开展数据驱动控制。抖振是指结构在流体中由于不稳定分离流的激励所引起的强迫振动,机翼绕流中的激波抖振问题就是典型的代表,其核心是不稳定绕流形成的激励载荷。由于这种不稳定流动本身与结构是否运动无关,因此,激波抖振的研究主要采用刚性模型[16-17]。在跨声速流动中,当来流状态(马赫数和迎角)满足一定条件后,激波抖振就会发生,并伴随有激波的自激振荡和气动载荷的脉动,也经常被称为跨声速抖振。针对刚性模型的激波抖振流动控制是流体力学领域的研究热点之一,研究者们采用了多种控制方法来抑制激波抖振中的脉动载荷。目前的控制方案主要是利用主动或者被动控制机构来对从激波到翼型后缘的流动进行调控[18]。主要的控制方式有附面层凹槽[19]、控制鼓包[20]、涡流发生器[21]、尾缘偏转装置[22]等。上述控制方法能够部分降低抖振脉动载荷或缩小抖振发生的来流状态范围,但其局限性在于,仅能针对特定抖振状态,不能自动适应不同的流动状态,且部分控制手段不能完全抑制抖振载荷。
为完全抑制激波抖振的脉动载荷,并使控制律在来流状态发生改变时具有较强的鲁棒性,本文以NACA0012翼型为模型,采用基于S-A湍流模型的URANS方法,以尾缘舵面为执行机构,探索基于时域仿真数据设计无模型自适应控制策略,实现对激波抖振脉动载荷的抑制。
1 激波抖振流动控制系统
1.1 流动数值仿真方法
本研究中,数值仿真采用基于有限体积方法的URANS求解程序。二维可压缩URANS控制方程可以表示为:

其中W为守恒变量,Fi(W,Vgrid)为无黏通量,Fv(W)为黏性通量,Vgrid为网格运动速度,Ω为控制体,∂Ω为控制体边界,n为边界外法线方向单位向量。
引入S-A湍流模型封闭雷诺平均方程,湍流和平均流动的空间离散和时间积分采用弱耦合方式。无黏通量采用AUSM+UP二阶格式离散和最小二乘重构格式,黏性通量采用二阶中心格式离散。在湍流模型中,对流项采用AUSM格式离散,耗散项采用二阶中心格式离散。在进行非定常流动仿真过程中,采用双时间推进求解控制方程,伪时间迭代采用四阶龙格库塔推进[22-23]。
翼型表面采用无滑移边界条件,远场采用无反射黎曼边界条件。针对数值仿真过程中翼型舵面的偏转运动,采用径向基函数插值的动网格方法实现流动控制过程中网格坐标的更新[24]。
研究算例采用NACA0012的激波抖振算例,计算域为如图1所示的非结构混合网格,图2为计算得到的抖振始发边界,可以看出与实验结果[25]基本相符。
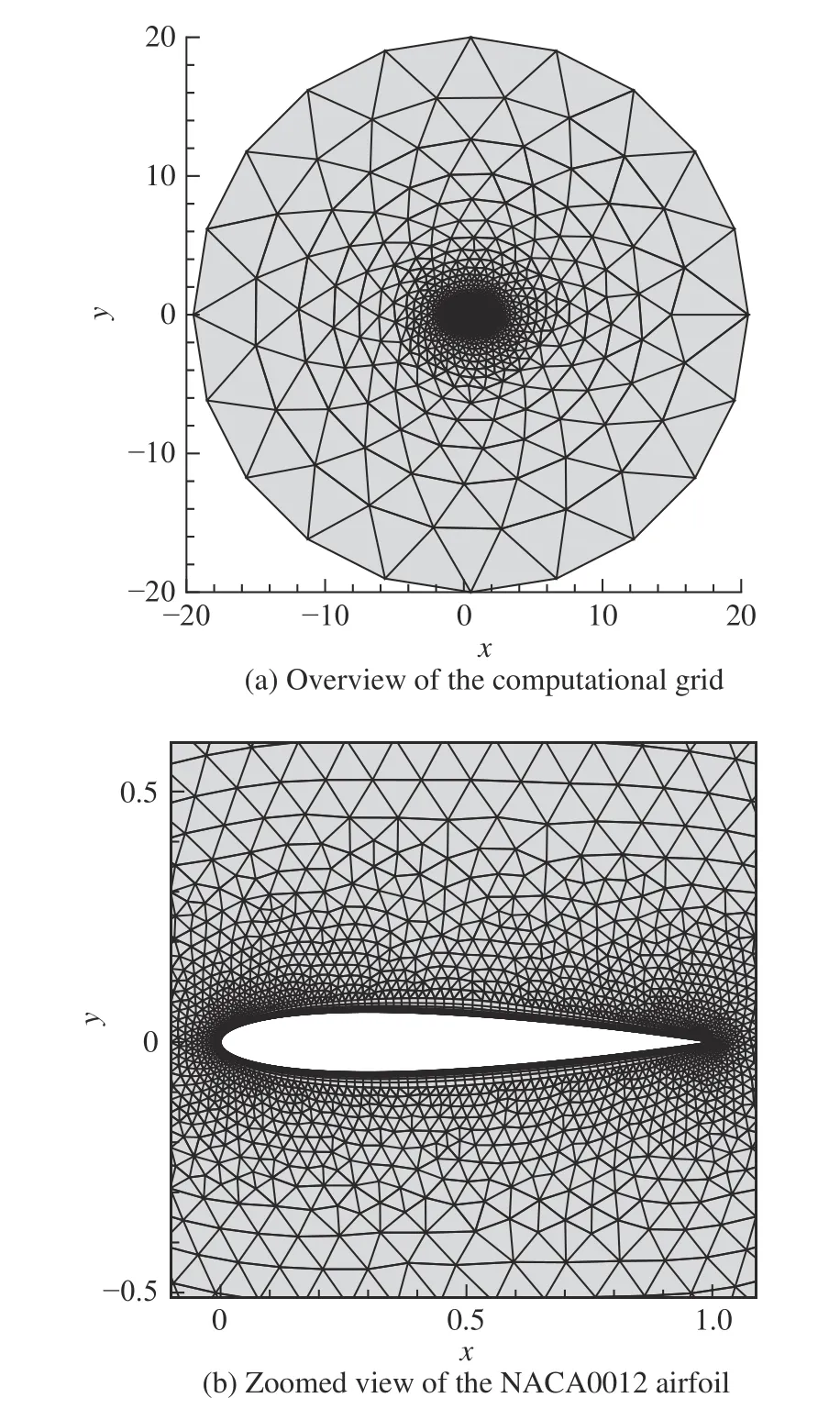
图1 NACA0012翼型计算网格Fig. 1 Computational grid of the NACA0012 airfoil
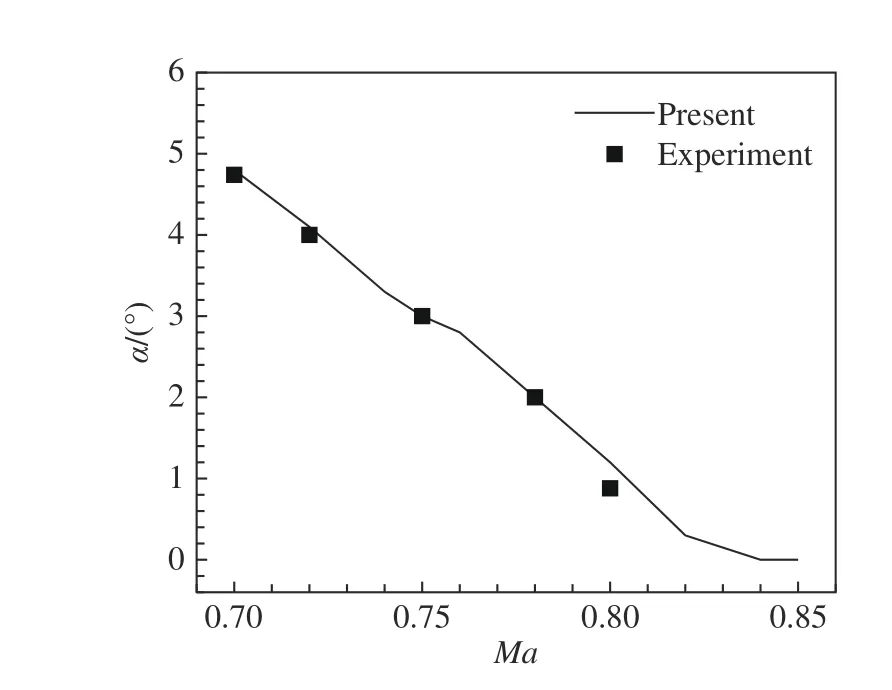
图2 激波抖振始发边界的比较Fig. 2 Comparison of the onset boundary of shock buffet
1.2 控制系统建立
研究的控制对象为NACA0012翼型,如图3所示。闭环控制系统的执行机构为翼型尾缘舵面,舵面长度为0.2倍弦长(c),其中α为来流迎角。控制系统输出的控制量为舵偏角β,反馈信号为升力系数。升力系数由压力分布积分得到,光滑性较好,有利于系统的稳定。对于真实机翼结构,升力与翼根弯矩成正比,而翼根弯矩可以通过应变片测量得到。
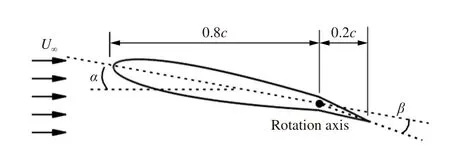
图3 研究模型示意图Fig. 3 Schematic diagram of the research model
2 激波抖振无模型自适应控制
2.1 无模型自适应控制
无模型自适应控制[26]是一种数据驱动的控制方法。它的基本思路是,在每个时刻,基于伪偏导数(pseudo partial derivative,PPD)将离散时间非线性系统等价转化为基于系统输入/输出的动态线性化数据模型。不用建立流动系统的精确数学模型,利用流动系统的输入/输出数据在线估计系统伪偏导数,然后最小化给定的性能指标,来实现流动系统数据驱动的自适应控制。
研究中的激波抖振流动系统可以用如下单输入单输出离散时间非线性系统描述:

其中CL(k)和β(k)分别表示系统在k时刻的输出升力系数和输入舵偏角,ni、no分别为未知的输入/输出延迟阶数,f为描述升力系数与舵偏角之间关系的未知非线性函数。
基于PPD将上述流动系统等价转化为如下动态线性化数据模型:

其中φ(k)为系统(2)的PPD。由系统历史输入/输出数据估计得到,通过最小化如下函数:

得到伪偏导数的估计算法(其中μ>0为权重因子):

η∈(0,1]是加入的伪偏导数更新步长,目的是使该算法具有更强的灵活性,本文中均取η= 1。
为了消除激波抖振流动的脉动载荷,提高流动稳定性,考虑如下性能指标:

结合动态线性化数据模型(3)最小化性能指标(6)得到控制律为:

综上,得到控制系统框图如图4所示,框图中的上半部分的回路1为自适应回路,表示自适应律利用系统输入输出数据在线估计伪偏导数,当系统参数发生变化时对控制器参数进行调节,使系统工作在最优或接近最优的状态。下半部分的回路2为一般反馈回路,通过最小化性能指标得到。

图4 无模型自适应控制系统框图Fig. 4 Block diagram of MFAC
2.2 固定来流状态
对于NACA0012翼型的激波抖振流动,Ma= 0.7、Re= 3×106时,该翼型脉动载荷最大的状态[22]为α=5.5°,因此本文首先选择该状态为控制对象。利用上文中的流动数值仿真方法仿真该无模型自适应控制律的控制效果。图5为在t= 50时施加控制后,升力系数与舵偏角的时间历程。可以看出,未施加控制时,由于激波附面层干扰,激波抖振发生,存在着大幅的升力脉动,施加控制后,升力脉动迅速消失,并且舵偏角也恢复到初始的0°。
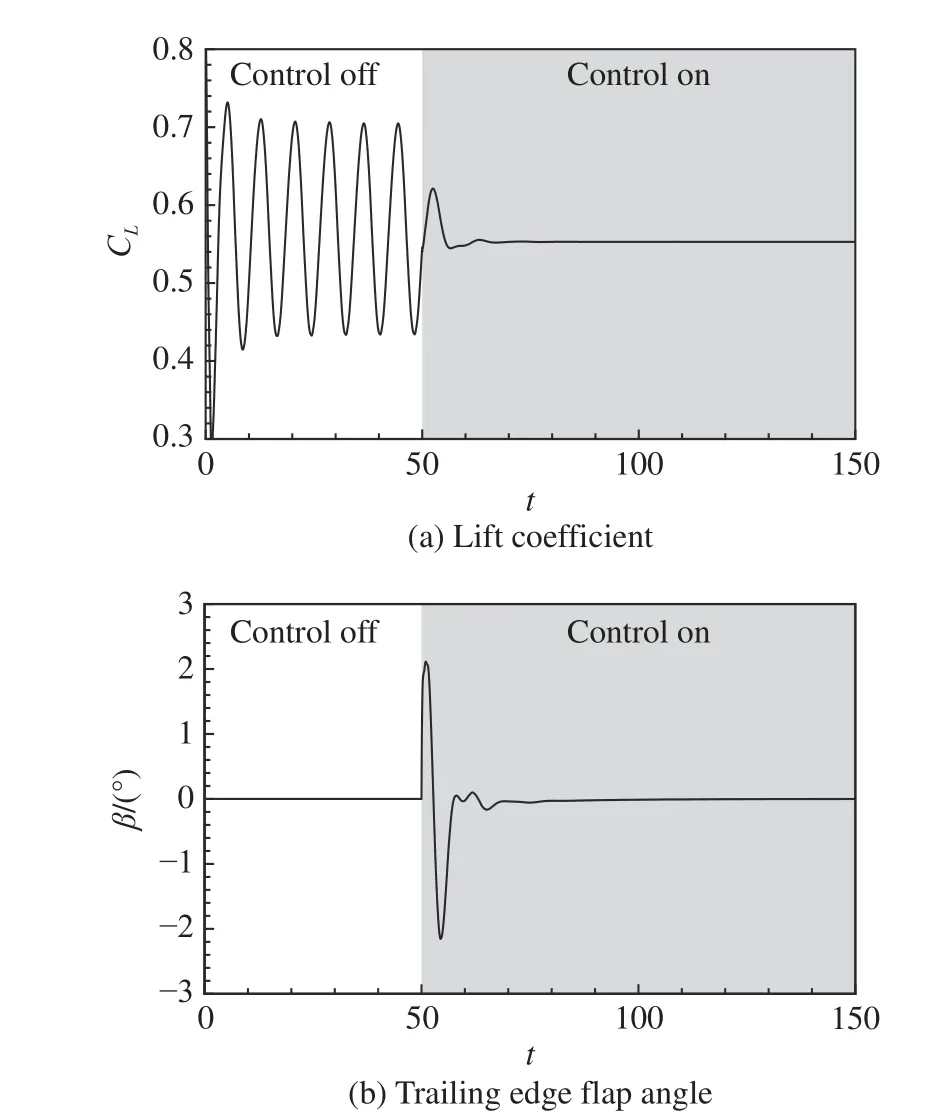
图5 升力系数和舵偏角时间历程Fig. 5 Time history of the lift coefficient and the trailing-edge flap angle
定义调节时间为从控制施加时刻到载荷脉动幅值降至未施加控制的载荷脉动幅值2%以下的时间,稳态控制效果为载荷脉动幅值减小的比例。在采用相同控制机构的情况下,无模型自适应控制与文献中的开环控制[27](舵面谐振)、比例控制[28]的调节时间和稳态控制效果对比见表1。从表中可以看出,无模型自适应控制在调节时间和稳态控制效果方面均优于文献中的开环控制和比例控制。

表1 不同控制方案对比Table 1 Comparison of different control strategies
对于非线性的激波抖振流动系统,在流场从不稳定定常流场逐渐发展到极限环的过程中,分别选取不同时刻(t= 40、t= 80、t= 150)开启控制,如图6所示。可以看出,无模型自适应控制在非线性流动发展的不同阶段均能快速抑制脉动载荷,使流场逐渐恢复为不稳定定常流场。
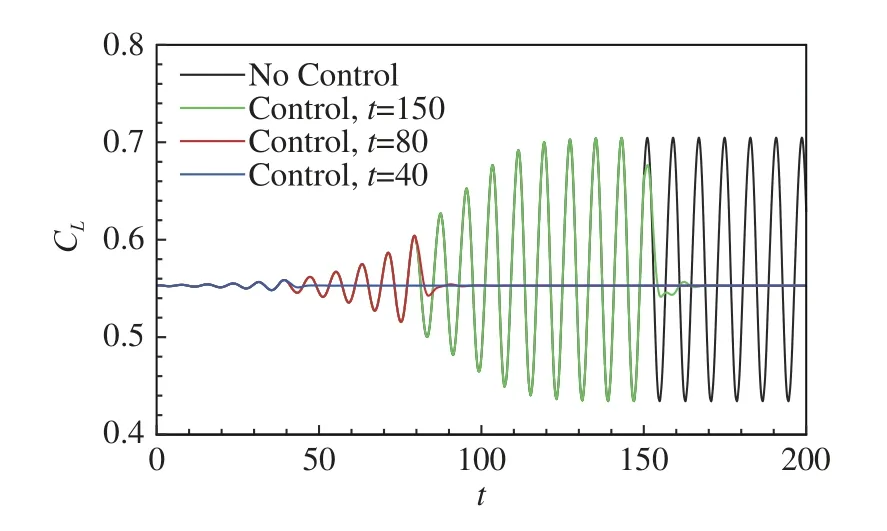
图6 不同时刻施加控制升力系数响应Fig. 6 Lift coefficient response for the control turned on at different time instances
OAT15A翼型也是常用的激波抖振研究对象,它与NACA0012翼型的激波抖振相同,均由激波附面层干扰引起。因此,我们利用针对NACA0012翼型抖振设计的数据驱动控制律来抑制OAT15A翼型,来流状态为Ma= 0.73、α= 3.7°。由于两个不同翼型抖振的动力学特性相似,而数据驱动的无模型自适应控制又不依赖流动系统的精确数学模型,而是在线利用系统输入/输出数据调节控制律参数,使其工作在最优或者接近最优的状态。因此,可以预见如图7所示的控制结果,原控制律依然能够快速消除抖振脉动载荷,使得流场逐渐恢复到该来流状态对应的不稳定定常流场。
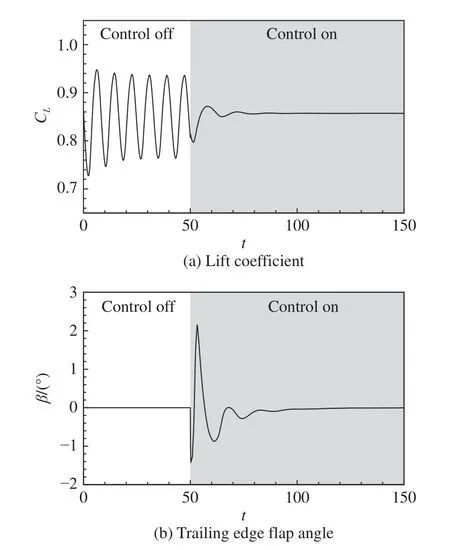
图7 升力系数和舵偏角时间历程Fig. 7 Time history of the lift coefficient and the trailing-edge flap angle
2.3 时变来流状态
当被控对象的工作环境发生变化后,自适应控制应能根据环境变化对控制器参数进行调节,以获得期望的控制性能。令来流马赫数固定为Ma= 0.7,来流迎角按式(8)规律连续变化,如图8(a)所示。


图8 来流状态、升力系数和舵偏角时间历程Fig. 8 Time history of the freestream state, lift coefficient and trailing-edge flap angle
没有开启控制时,升力系数变化如图8(b)中虚线所示,随着迎角的改变,升力系数均值和脉动幅值也在逐渐变化,其中不乏有大幅升力脉动出现。在t=50时,对系统开始控制,翼型升力系数和舵偏角时间历程如图8(b)和8(c)所示,开始控制时,控制系统也以较大的舵偏角快速抑制升力脉动,此后,即使来流状态发生改变,控制系统也能够以小幅舵偏角使流场平稳过渡,不再出现大的脉动载荷。
3 结 论
本文针对NACA0012翼型的抖振流动,采用无模型自适应控制来抑制抖振脉动载荷。控制器以翼型升力系数作为反馈信号,作动机构采用尾缘舵面,通过对控制律进行时域仿真,可以发现该控制策略能够自动适应时变的来流状态,并且都能完全消除抖振脉动载荷。通过与已有文献中的结果对比,本文中的无模型自适应控制在调节时间和稳态控制效果方面均优于开环控制和比例控制。
为了解决流动自适应控制面临的问题,采用了数据驱动的控制方法,该方法利用流动系统的输入/输出数据,将流动系统等价转化为动态线性化数据模型,然后针对此动态线性模型设计控制器,最小化给定性能指标。由于无模型自适应控制不依赖流动的精确数学模型,能够摆脱控制器设计对流动系统数学模型的依赖,所以也避免了与建模孪生的一系列难题。
基于精确流动模型的闭环控制可以获得最优的控制效果,揭示出流动控制的物理机理,但当流动系统精确的线性模型难以建立或流动状态发生变化导致其数学模型改变,数据驱动控制则有潜力成为一种更实用的方法。
猜你喜欢
航空学报(2022年9期)2022-10-14
内燃机学报(2022年2期)2022-03-23
航空学报(2021年3期)2021-03-27
民用飞机设计与研究(2020年4期)2021-01-21
航空发动机(2020年3期)2020-07-24
新课程·中学(2019年7期)2019-09-17
科学Fans(2019年4期)2019-04-30
物理教学探讨(2018年1期)2018-02-13
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24