混合动力城郊物流车模糊逻辑能量管理策略研究
2022-01-12 09:31侯振宁陈东东乔天佑李国兴
重庆理工大学学报(自然科学) 2021年12期
侯振宁,王 铁,陈东东,乔天佑,李国兴
(太原理工大学 车辆工程系,太原 030024)
城郊物流车在给人们提供便利的同时也带来了大量负面影响,如能源危机、环境污染、大量温室气体的排放等。为了缓解城郊物流车给能源与环境带来的双重压力,混合动力城郊物流车成为现阶段该问题最好的解决方法之一[1-3]。
混合动力电动汽车(hybrid electric vehicles,HEV)通常采用2种动力源,动力源之一是传统发动机,另一种动力源由电机/电池组提供。与纯电动汽车(electric vehicles,EV)相比,HEV具有多方面的优越性,HEV充分利用了发动机与电机的工作特性,但需要利用能量管理策略协调发动机与电机的扭矩分配,保证发动机长期工作在高效低能耗区[4]。模糊逻辑控制策略是应用模糊集合和模糊规则进行推理,表达过渡性界限,模拟人脑方式,实行模糊综合判断[5-7]。模糊逻辑控制与逻辑门控制的融合可以更好地处理模式切换之间的过渡区问题。国内外研究学者针对HEV的能量管理策略做了大量研究,Lee等[8]在1998年把模糊控制思想迁移到HEV的能量管理策略中,根据大量的实验数据分析和经验总结制定了相关的模糊控制规则。陈瑞增[9]以并联式HEV为研究对象,提出了基于转矩分配的模糊能量管理策略,利用遗传算法对隶属度函数设计的主观性进行了优化升级。王伟等[10]基于模糊控制理论提出了发动机性能最优运行控制策略及具体实施办法,比传统的控制算法节油率提高了4.88%。与逻辑门控制策略相比,模糊逻辑控制策略具有较好的鲁棒性和适应性,但模糊规则隶属度函数的设计,完全依赖于设计人员的知识和经验。目前针对HEV模糊逻辑控制策略的研究大部分是基于仿真模型进行研究,很少有试验验证,而且针对城郊物流车在中国道路工况[11]下的研究较少。
本文以混合动力城郊物流车为研究对象,考虑新发布的中国道路工况与动力电池寿命,基于Matlab/Simulink建立了仿真模型,制定了逻辑门控制策略,以提高整车燃油经济性为目标,制定了模糊逻辑控制策略。通过仿真与台架试验验证了所提出的控制策略。
1 HEV驱动系统方案设计
本文针对的目标车型为混合动力城郊物流车,以大运新奥普利轻型卡车为基础,整车设计参数如表1,该混合动力城郊物流车性能设计指标如下:

表1 整车设计参数
1)0~100 km/h加速时间t<16 s;
2)最高车速100 km/h;
3)最大爬坡度≥20%;
4)纯电续航里程(满载40 km/h等速)≥50 km。
在保证整车设计参数不变的前提下,对传动系统进行重新设计。由于轻卡轴距相对较长,因此采用单轴并联式混合动力结构如图1所示,动力系统零部件参数如表2。该方案可通过转矩耦合方式使发动机工作在高效区,能够进一步提升整车燃油经济性[12]。
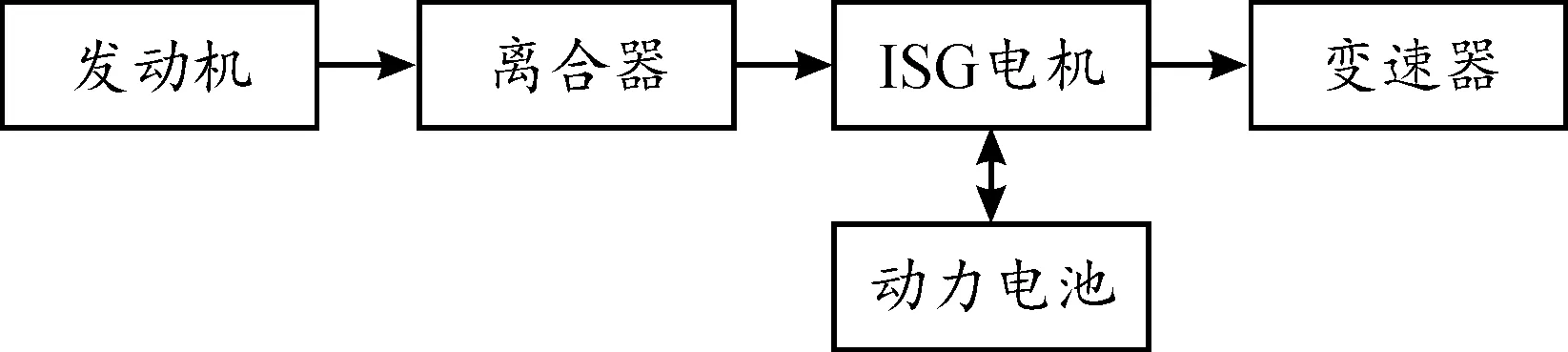
图1 单轴并联式混合动力结构框图
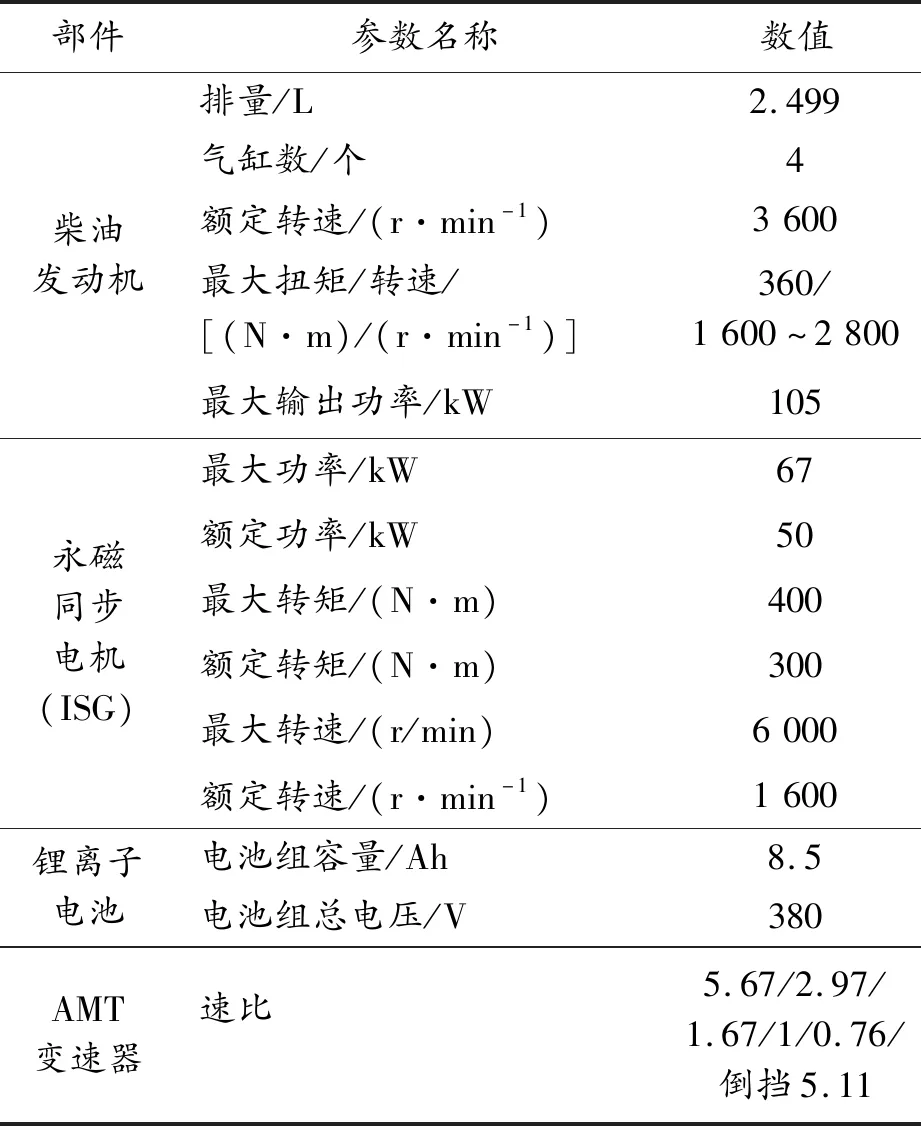
表2 动力系统零部件参数
该构型的混合动力系统主要由发动机、液压离合器、集成式起动机/发电机(integrated starter generator,ISG)、变速箱与主减速器构成,可以实现车辆的纯电动、混动、发电、制动能量回收等多种模式。整车动力设备是发动机与电机,组合方式为在发动机与电机之间由液压离合器负责动力连接与中断,在发动机起动时,电机可作为发动机的起动电机,在车速较低时,由电机单独驱动;车速较高或大功率工况,发动机与电机一同工作;在电池SOC低于阀值时由发动机单独驱动,多余扭矩用于拖动电机发电;当车辆处于减速或制动工况时,电机也可以进行制动能量回收。
2 建立HEV仿真模型
2.1 整车模型
汽车在行驶过程中必须克服所受到的所有阻力才可以正常行驶。本文利用Matlab/Simulink自带车身模块为主体,建立了整车动力学模型,发动机与电机产生的转矩经过变速箱、主减速器与整车动力系统模型产生的阻力矩相平衡。具体模型如图2所示。

图2 Simulink整车模型
2.2 发动机模型
发动机建模方法有理论建模与实验建模2种。理论建模基于理论分析,所建模型主要是发动机动态模型,利用系统动力学知识对功率生成与传递过程进行模拟,用微分方程和代数方程来精确描述发动机各参数间的关系。模型较复杂、运算时间长,主要用于研究发动机结构、工作机理及各参数对性能的影响。同时,发动机很多特征参数往往根据经验估计,难以保证精度[13]。本文采用实验建模,主要通过进行发动机外特性、负荷特性试验,建立起输入-输出模型,利用查表或数据拟合求取发动机转矩、燃油消耗率及排放,模拟发动机工作特性,加装离合器以控制动力连接,具体模型如图3所示。

图3 Simulink发动机模型
2.3 电机模型
电机建模方法与发动机建模方法类似,通过进行电机的特性试验得到外特性图,效率与转速、转矩图,通过查表获得数据,具体模型如图4所示。
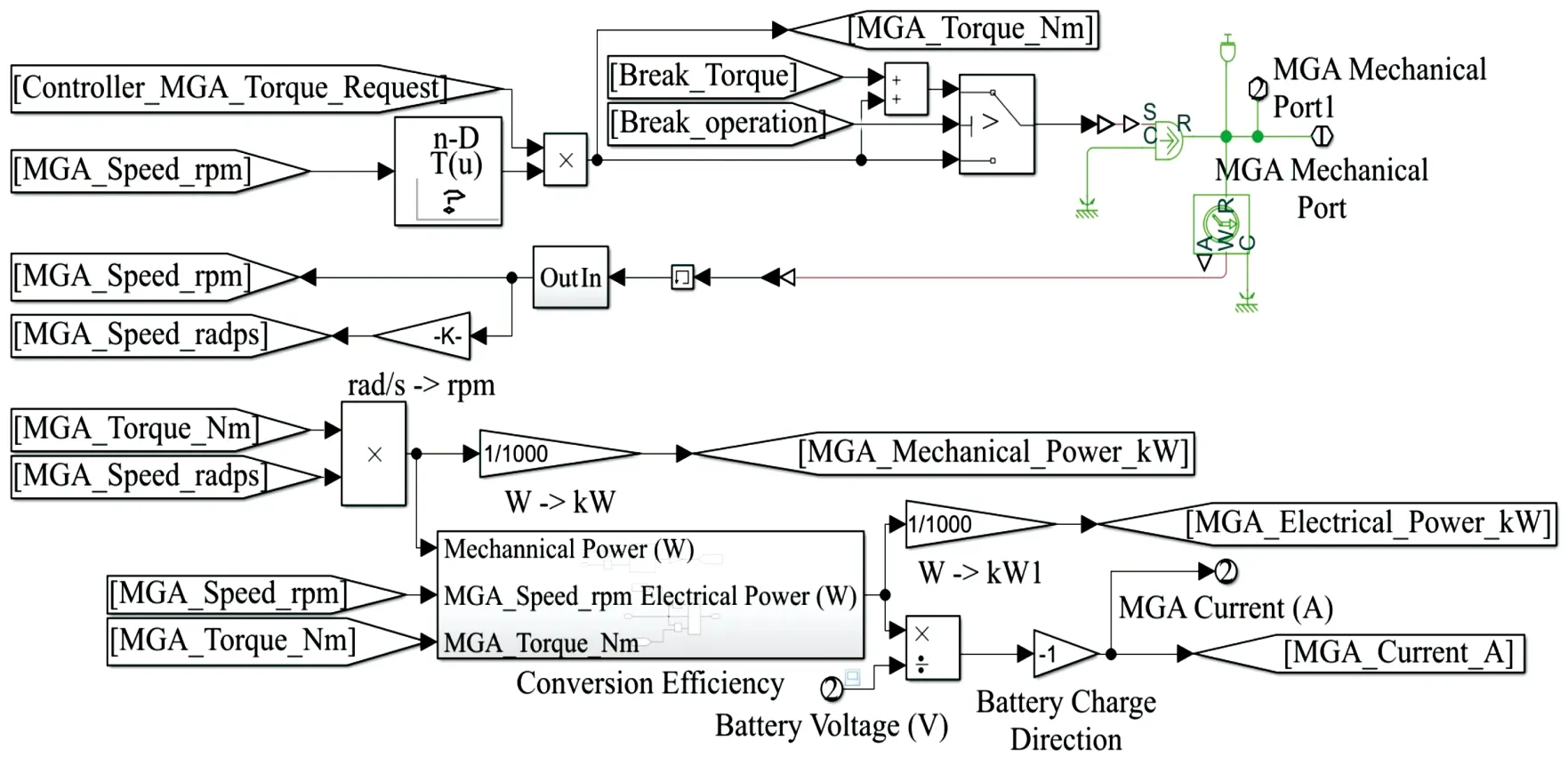
图4 Simulink电机模型
2.4 动力电池模型
不考虑电池内部复杂的电化学反应,采用等效内阻模型来描述电池的各项性能,将电池组简化成一个理想电压源和电阻串联,如图5所示[14]。
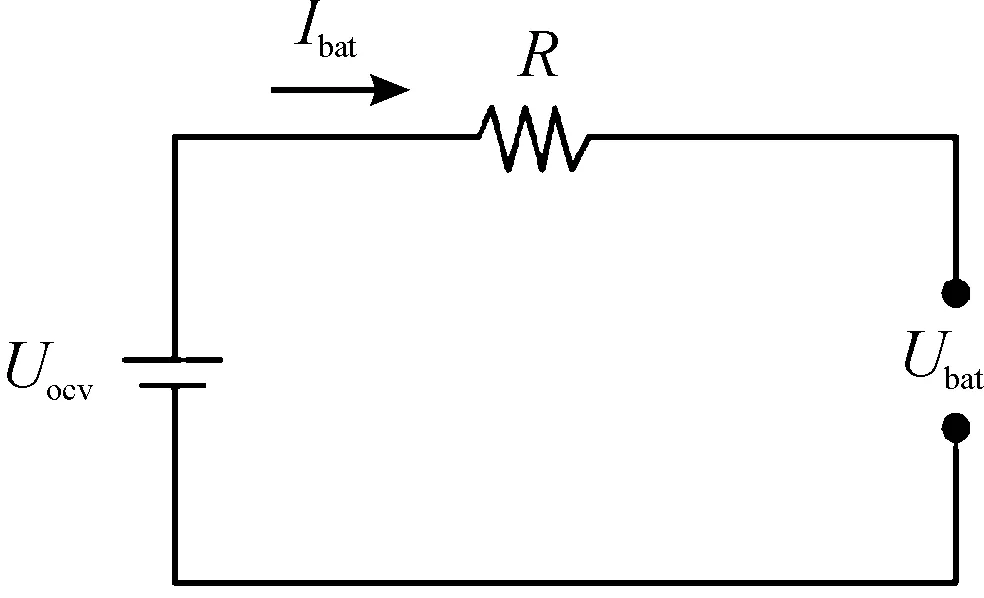
图5 电池内阻模型等效电路
其中Uocv为电池电动势,R为电池内阻,两者都是SOC的函数,其值通过实验数据查表获得,Ubat为电池端电压,Ibat为回路电流,放电时为正值,充电时为负值。电池SOC采用安时法计算为
(1)
式中:SOCI为电池初始荷电状态值,C为电池容量,t为当前时刻,具体模型如图6所示。动力电池初始电荷状态值SOCI为0.7。
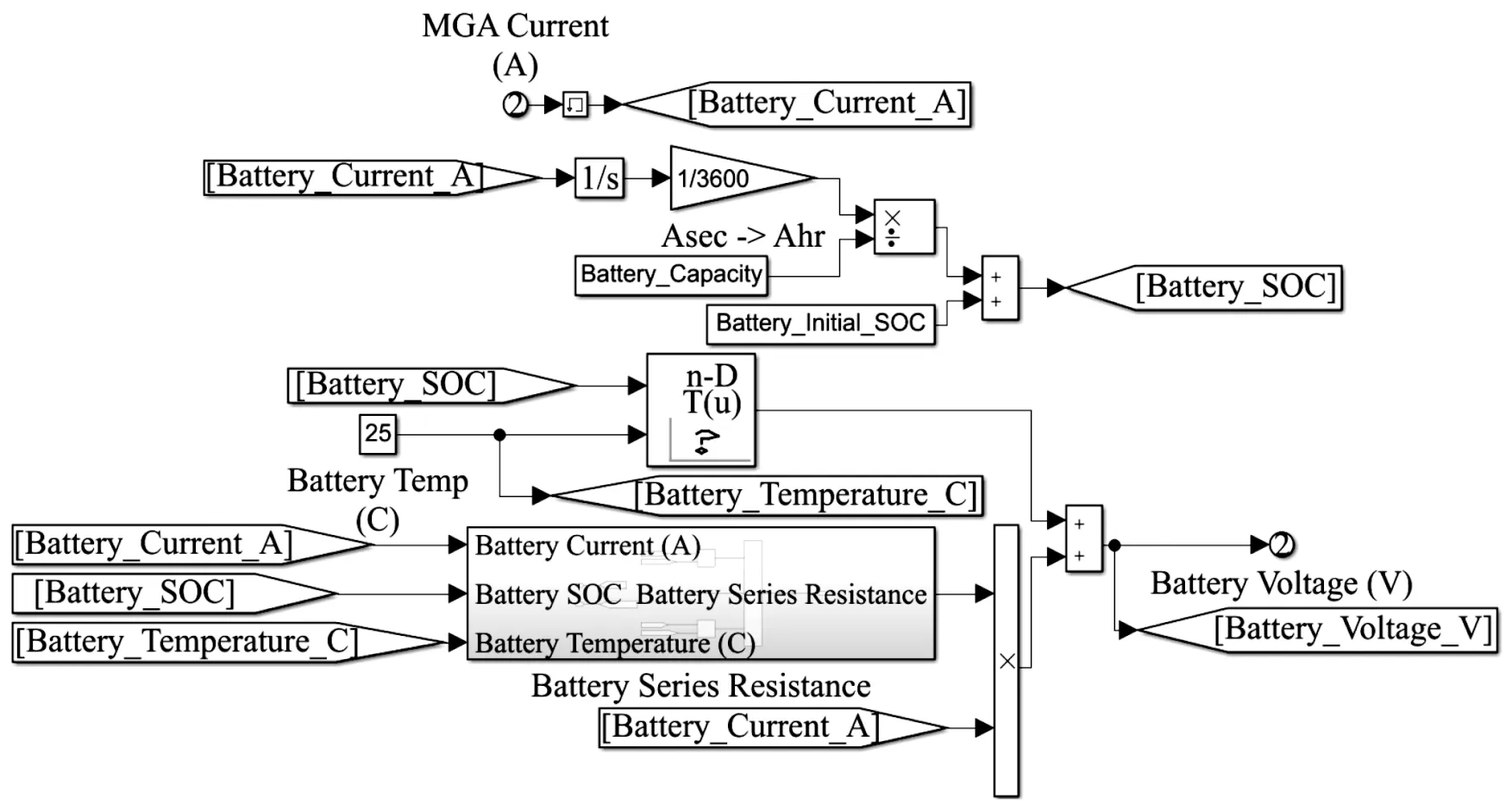
图6 Simulink动力电池模型
2.5 驾驶员模型
在现实的汽车驾驶过程中,驾驶员通过踩动加速踏板或制动踏板使车速按自己的意愿进行变化。在正向仿真时,用驾驶员模型来代替现实中的驾驶员,取既定循环工况下的目标车速为驾驶意愿,根据实际车速与目标车速的差值来确定加速踏板或制动踏板的开度。故驾驶员模型的输入参数为实际车速和目标车速,输出参数为加速踏板开度和制动踏板开度。具体模型如图7所示。
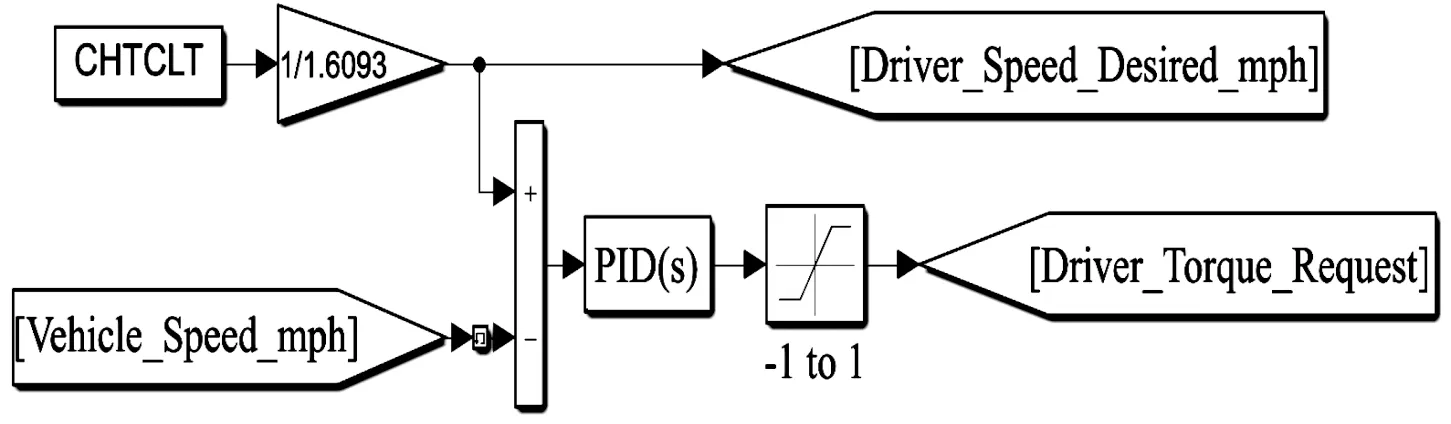
图7 Simulink驾驶员模型
3 模糊逻辑控制策略
3.1 逻辑门控制策略
HEV的能量来源为发动机,因此,控制策略应尽量使发动机工作在其高效低能耗区。根据驾驶员模型的转矩需求来分配发动机与电机应提供的转矩。图8为柴油发动机万有特性曲线,发动机在1 400~2 000 r/min时低扭矩有着较好的油耗表现,因此选定发动机将会在电机转速大于1 400 r/min时开启,2 000 r/min为换挡时刻转速。在实际行驶过程中,如果短时间频繁切换至混动模式与发电模式需要发动机频繁起停,燃油经济性会大大降低,排放性较差。因此,离合器将会在电机转速小于800 r/min 时断开,发动机关闭。
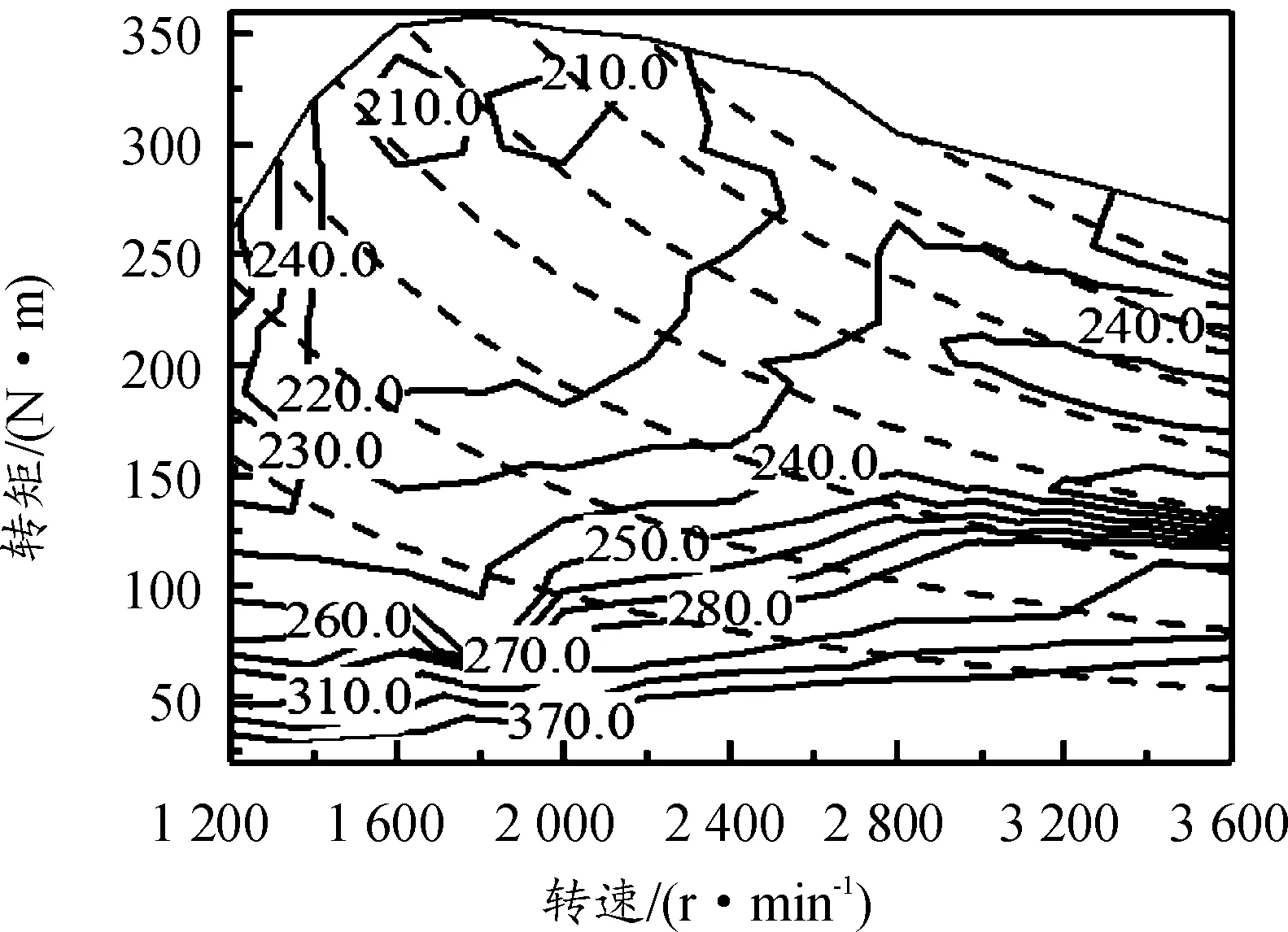
图8 柴油发动机万有特性曲线
混合动力城郊物流车共有纯电动、混动、发电3种模式,在各模式下都可进行能量回收,具体转矩分配策略与模式间切换条件如下:
1)纯电动模式
汽车起步时进入纯电动模式,当TDr≥0时,由电机提供所需扭矩。当TDr<0时进行制动能量回收,同时刹车系统介入,电机提供80%的扭矩,剩余的由刹车系统补偿。其中TDr为驾驶员需求转矩,单位为N·m。
2)混合动力模式
当汽车在纯电动模式运行至同时满足以下3个条件,rm≥1 400,TDr≥0,Gbox>2时,混动模式开启,当rm<800或rm>2 800时,混动模式关闭,汽车进入纯电动模式。当TDr≥0时混合动力模式有2种情况:
①TDr>Temin时,发动机提供该转速油耗率最小时的扭矩,剩余扭矩由电机提供;
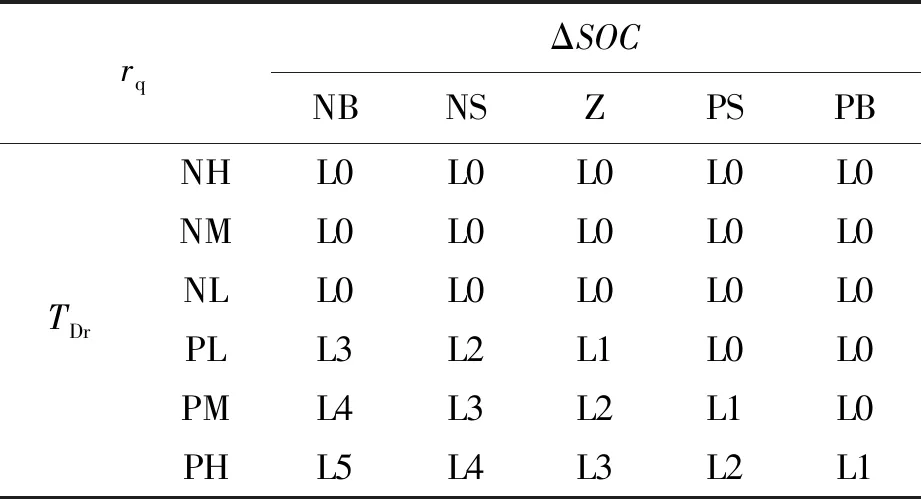
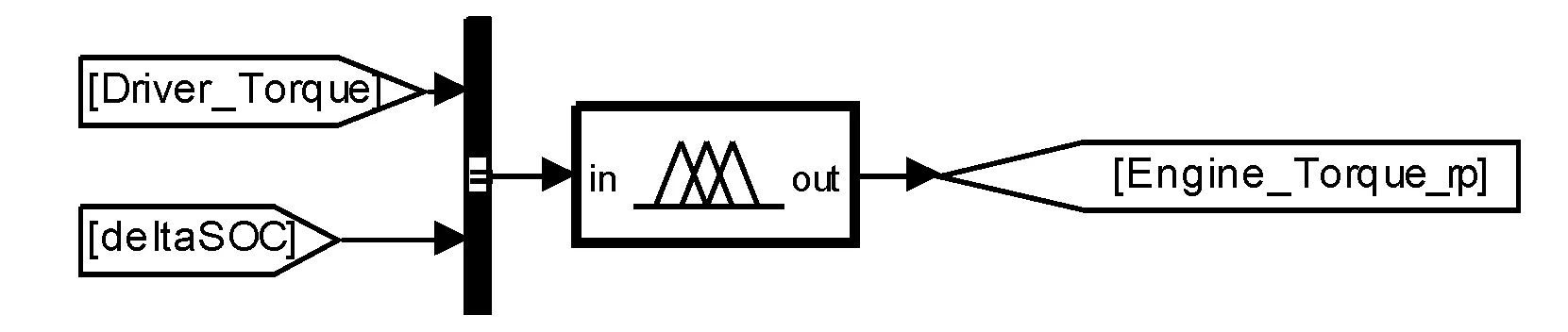
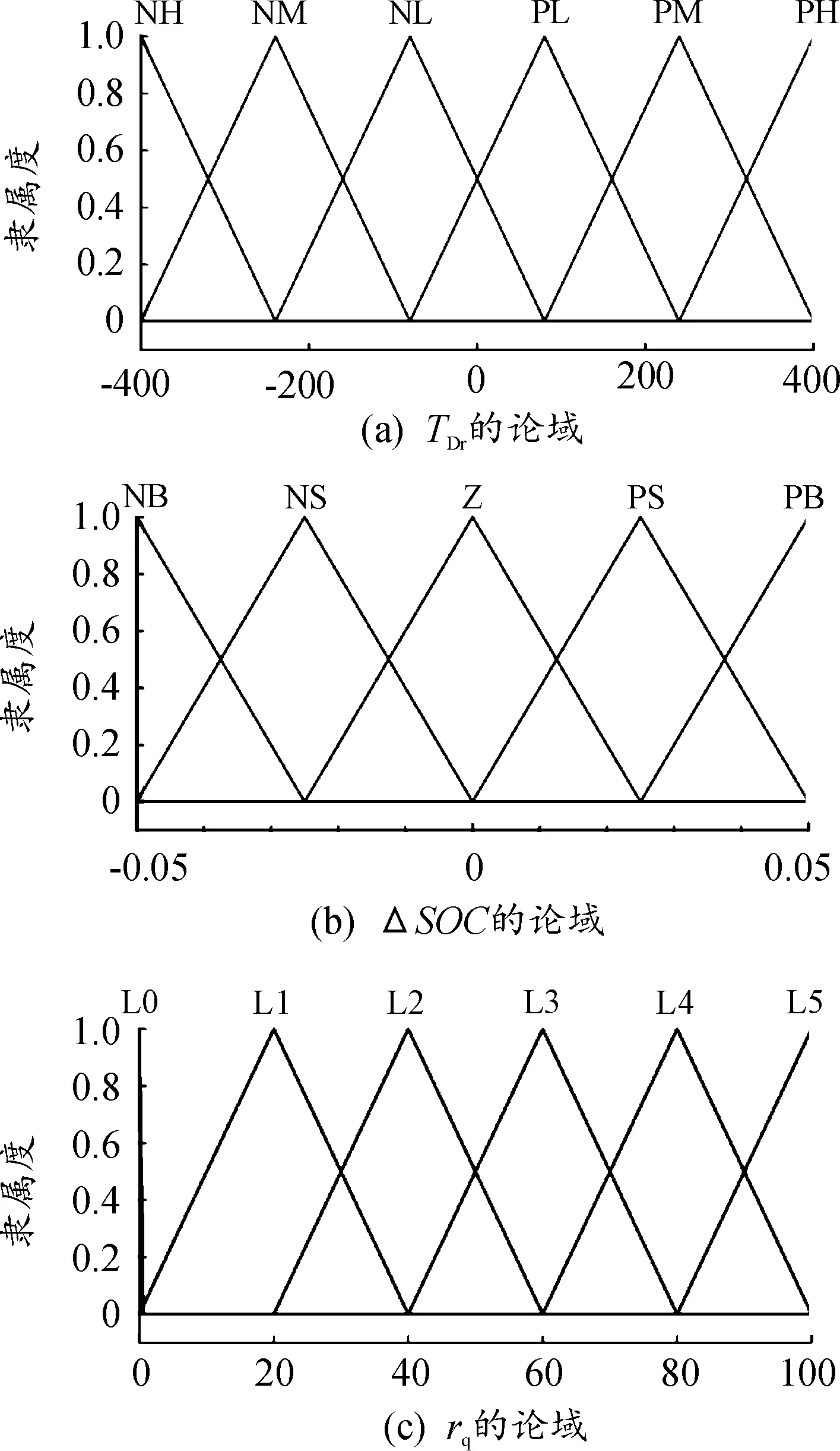
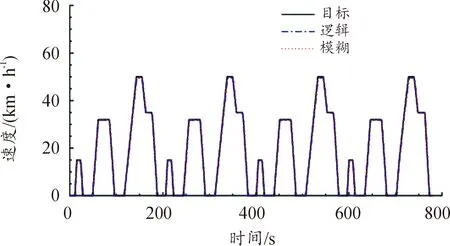
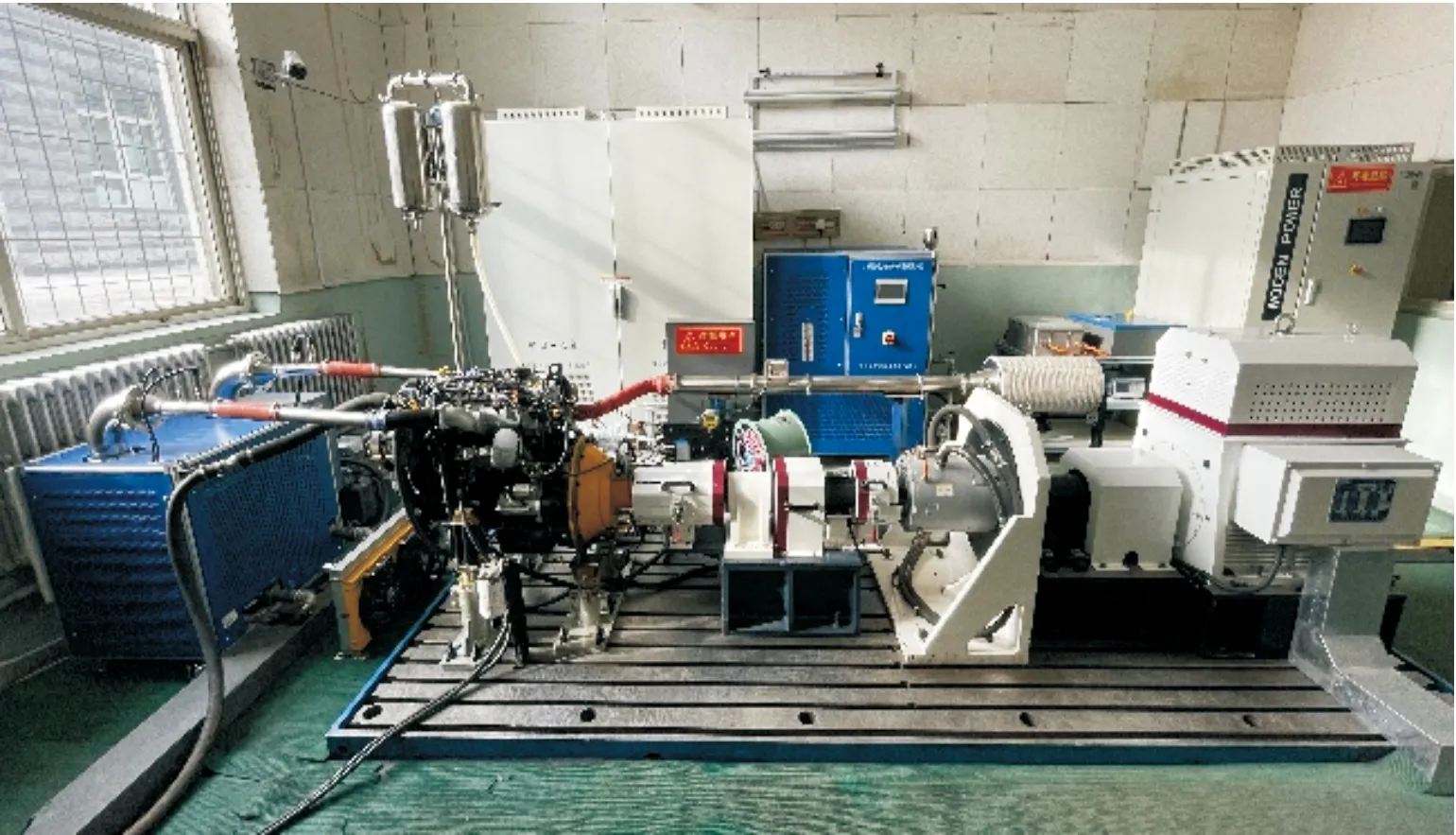
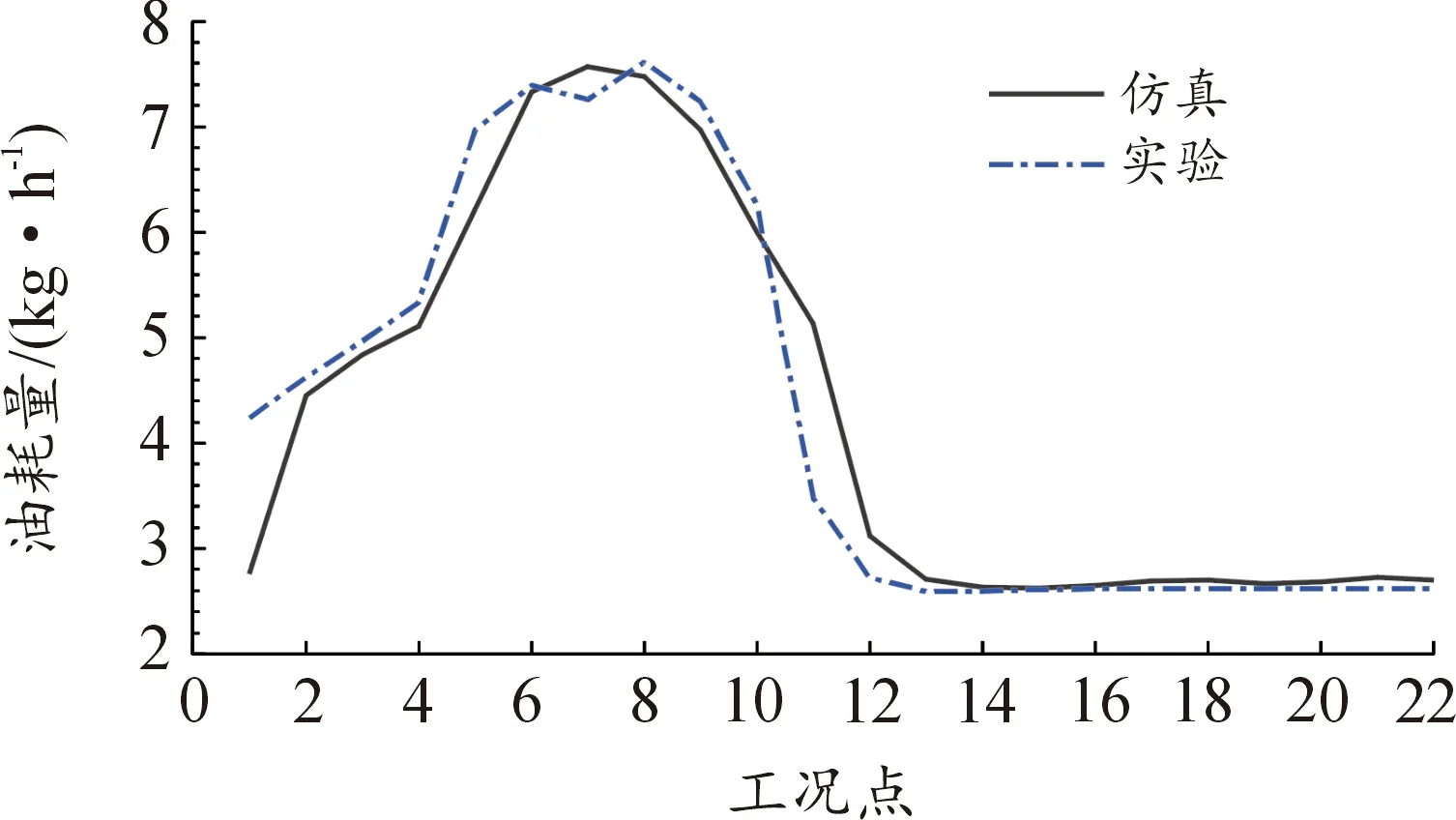
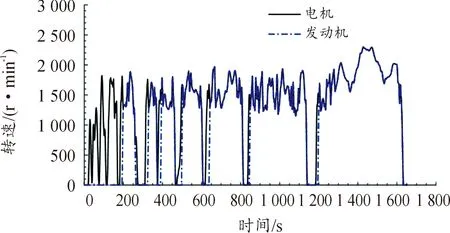
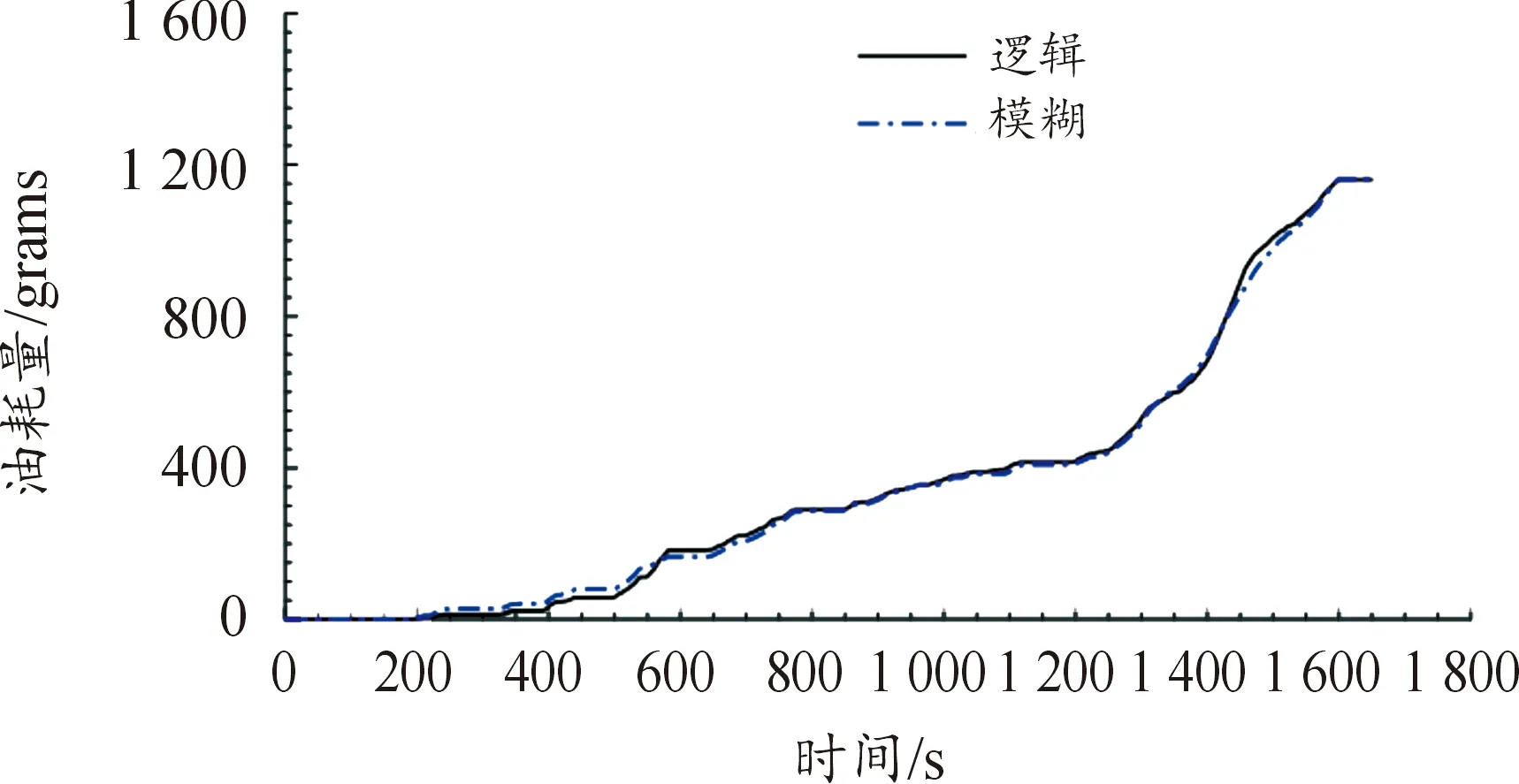
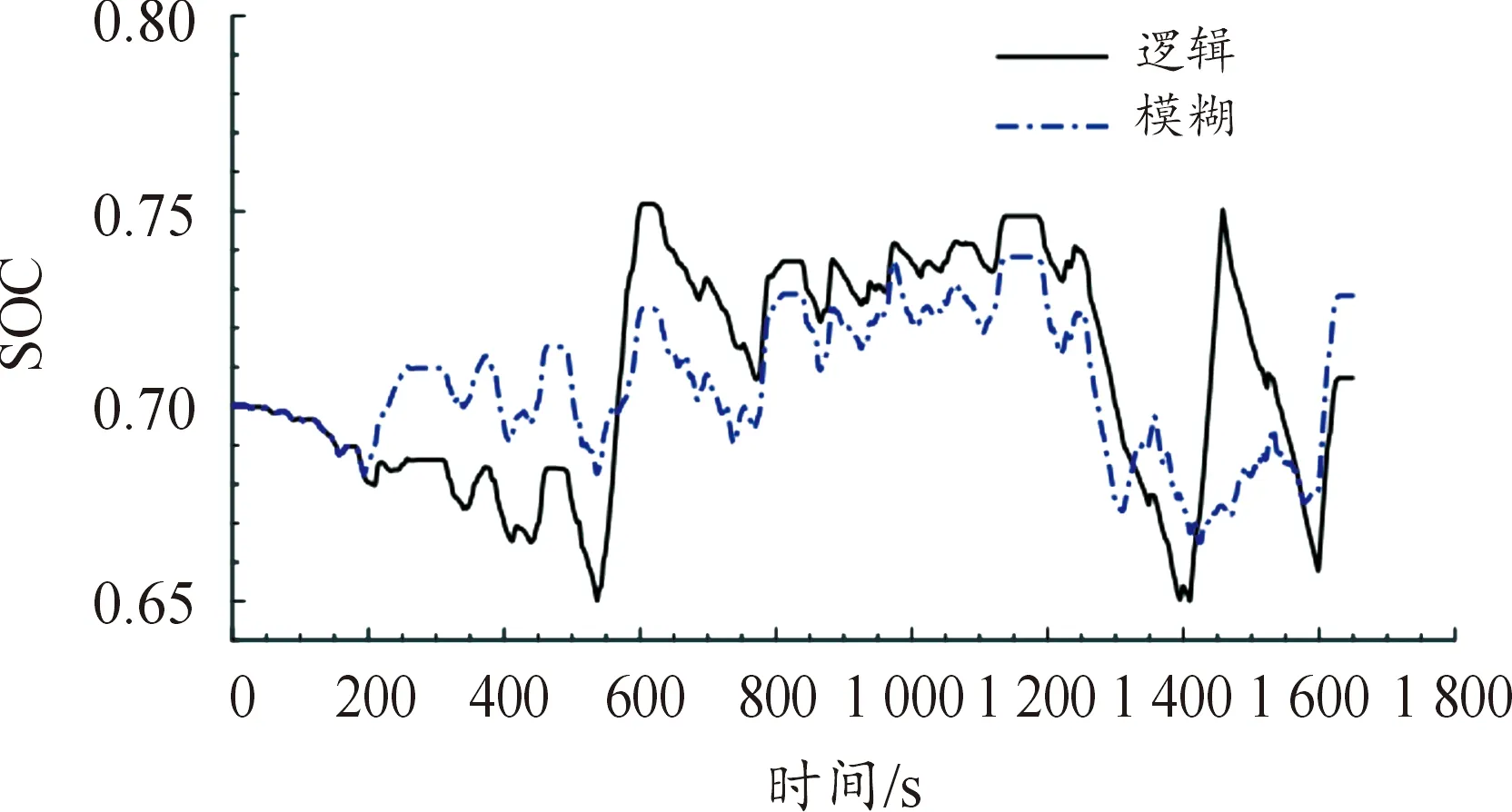
②TDr 当TDr<0时进行制动能量回收且有2种情况: ①TDr≥-0.8Tmmax,此时只由电机进行制动能量回收进行减速; ②TDr<-0.8Tmmax,此时刹车系统介入,电机提供80%的扭矩,剩余的由刹车系统补偿。 其中:rm为电机转速(r/min),Gbox为挡位,Temin为发动机油耗率最小时扭矩,Tmmax为电机最大扭矩(N·m)。 3)发电模式 当汽车在纯电动模式运行至同时满足以下3个条件,rm≥1 400,TDr≥0,SOC≤SOClow时,发电模式开启,当rm<800或rm>2 800或SOC≥SOChigh时,发电模式关闭,汽车进入纯电动模式。当TDr≥0时发电模式2种情况: ①TDr-Temin+Tmmax≥0,发动机提供该转速油耗率最小时的扭矩,剩余扭矩用来使永磁同步电机发电; ②TDr-Temin+Tmmax<0,电机提供的扭矩为-0.5Tmmax,发动机提供的扭矩为TDr+0.5Tmmax。 当TDr<0时进行制动能量回收且有2种情况: ①TDr≥-0.8Tmmax,此时只由电机进行制动能量回收进行减速; ②TDr<-0.8Tmmax,此时刹车系统介入,电机提供80%的扭矩,剩余的由刹车系统补偿。 其中,文献[15]中指出,SOC范围在0.75~0.65时,可以提供最长的循环寿命,SOClow为电池低阈值,为0.65,SOChigh为电池高阈值,为0.75。 4)混合动力模式、发电模式间的切换与变速箱换挡逻辑 汽车处于混合动力模式,当SOC≤SOClow时,转换为发电模式,处于发电模式有2种情况: ①SOC≤SOChigh,当rm<800或rm>2 800,发电模式关闭,汽车进入纯电动模式; ②SOC≥SOChigh,当rm<800或rm>2 800,发电模式关闭,汽车进入纯电动模式;当rm≥1 400,TDr≥0,Gbox>2,转换为混合动力模式。 本文研究的单轴并联式混合动力总成主要动力来自发动机,电机为辅助动力。在设计控制策略时尽量要求发动机工作在油耗最小曲线,只有当混动模式下0≤TDr 模糊转矩控制器框图如图9,通过驾驶员模型确定TDr,与ΔSOC同为输入,经模糊控制器得出rq后经计算得到发动机扭矩。将驾驶员需求扭矩分成6个模糊子集:NH、NM、NL、PL、PM、PH,其论域确定为[-400,400]。根据SOC变化量的范围将它分成5个模糊子集:NB、NS、Z、PS、PB,其论域为[-0.05,0.05]。发动机转矩系数分为6个模糊子集:L0、L1、L2、L3、L4、L5,其论域为[0,1]。TDr、ΔSOC和rq各个隶属度函数如图10,输入语言变量和输出语言变量采用三角形的隶属度函数。模糊控制规则如表3所示。 表3 模糊控制规则 图9 模糊转矩控制器框图 图10 TDr、ΔSOC和rq各个隶属度函数 在模糊推理中,与运算采用取小,蕴涵运算采用Mamdani方法[16],结论合成采用累加法,非模糊化则采用面积重心法,建立相应的隶属度函数和模糊规则[17]。 本文通过仿真分析与台架试验相结合的方法对模型与策略进行验证。选取欧洲行驶循环试验工况NEDC,由于该混合动力城郊物流车大部分使用场景处于市区,速度不高,所以仿真时选取NEDC的前780 s作为工况点。将工况点输入驾驶员模型,使用逻辑门控制策略与模糊逻辑控制策略进行仿真,实际车速与目标车速变化曲线如图11。该模型下2种控制策略实际车速与目标车速曲线贴合度较好,实际车速能够跟随目标车速,满足整车动力性要求。 图11 实际车速与目标车速变化曲线 搭建了单轴并联式混合动力实验台架如图12所示,发动机、电机同上文所选型号一致,可以进行需求扭矩为正时的纯电动、混动、发电模式的试验。由于模型运行一次NEDC 780 s工况未进入发电模式,由于实验条件的限制,在该工况中选取了22个混动模式工况点(134~155 s)进行台架重复试验,通过测量得到油耗量数据。逻辑门控制策略仿真与台架试验油耗量变化曲线如图13,模糊控制策略仿真与台架试验油耗量变化曲线如图14,结果表明2种控制策略下仿真与台架试验的油耗量变化趋势一致,说明所建立模型与策略具有可信性。 图12 单轴并联式混合动力实验台架 图13 逻辑门控制策略仿真与台架试验油耗量变化曲线 图14 模糊控制策略仿真与台架试验油耗量变化曲线 将仿真模型工况切换为中国汽车行驶工况第2部分:重型商用车辆CHTC-LT工况进行仿真。该工况共包括3个速度区间,工况时长共计1 652 s,其中市区区间时间比例为18.7%,城郊区间为58.9%,高速区间为28.4%,平均车速为34.6 km/h,最大车速为97.0 km/h,怠速比例为12.4%。图15为实际车速与目标车速变化曲线,同样,2种控制策略下实际车速与目标车速曲线贴合度较好,实际车速能够跟随目标车速,满足整车动力性要求。图16为需求扭矩变化曲线,2种控制策略下满足车速变化的需求扭矩TDr相同,图17为2种控制策略下发动机、电机转速变化曲线,可以看出发动机的起停时间、转速皆相同。 图15 实际车速与目标车速变化曲线 图16 需求扭矩变化曲线 图17 2种控制策略下发动机、电机转速变化曲线 图18为油耗量变化曲线,其中逻辑门控制策略百公里燃油消耗为8.91 L,模糊逻辑控制策略百公里燃油消耗为8.86 L,燃油消耗量下降了50 mL,达到了设计要求。图19为电池SOC变化曲线,SOC初始值为0.7,逻辑门控制策略仿真末值为0.71,模糊逻辑控制策略仿真末值为0.73,两者皆保持在允许范围内,且模糊逻辑控制策略SOC值的变化幅度更为平稳,达到了改进目的。 图18 油耗量变化曲线 图19 电池SOC变化曲线 本文进行了对所研究单轴并联式混合动力城郊物流车目标车型的选取,关键部件的选型,基于Matlab/Simulink建立了仿真模型,建立了逻辑门控制策略,根据混合动力系统的需求扭矩和ΔSOC来控制发动机转矩输出,搭建了单轴并联式混合动力台架,在NEDC780s工况下验证了2种控制策略在仿真模型与台架试验的可信性。通过仿真试验结果表明,在CHTC-LT工况下,模糊逻辑控制策略与逻辑门控制策略相比,能够很好地控制电池组SOC变化,百公里燃油消耗量降低50 mL,提高了整车燃油经济性,实现了预期效果。3.2 模糊逻辑控制策略
4 模型与策略验证

5 仿真分析


6 结论
猜你喜欢
防爆电机(2022年2期)2022-04-26装备制造技术(2020年2期)2020-12-14装备制造技术(2018年8期)2018-10-17汽车维护与修理(2018年1期)2018-04-04凿岩机械气动工具(2017年3期)2017-11-22作文周刊·小学一年级版(2017年27期)2017-08-10电子产品可靠性与环境试验(2016年6期)2016-05-17通信电源技术(2016年1期)2016-04-16华东理工大学学报(自然科学版)(2015年4期)2015-12-01微特电机(2015年1期)2015-07-09