
自动驾驶车辆的变步长路径跟踪控制
2022-01-18 11:21李军宋永雄周舟
华侨大学学报(自然科学版) 2022年1期
李军, 宋永雄, 周舟
(1. 重庆交通大学 机电与车辆工程学院, 重庆 400074;2. 重庆交通大学 重庆市轨道交通车辆系统集成与控制重点实验室, 重庆 400074;3. 中国通用技术集团, 北京 100055)
路径跟踪一般是通过控制转向角度,实现对预期轨迹的跟踪,不仅要求跟踪的准确性,还要求跟踪过程中车辆的稳定性及实时性[1-3].模型预测控制(MPC)由于能够处理多约束优化问题,对于处理复杂环境的道路跟踪具有良好效果,被广泛应用于路径跟踪研究中.然而,MPC在处理复杂环境时,大计算量引起的实时性问题仍需进行优化[4-5].针对路径跟踪的需求及MPC的特点,Wang等[6]利用模糊控制对转矩输出进一步优化,有效降低单一模型预测控制器计算压力.王志文等[7]为了解决短时域可能导致系统闭环发散无法得到最优解的问题,对预测时域内的系统输入和输出进行收缩约束,保证控制器优化效率.文献[8-9]针对车辆预测最优时域进行计算,并设置了前轮转角、质心侧偏角约束以提升跟踪稳定Sun等[10]利用模糊控制对侧偏角的变化情况,将车辆操纵分为瞬态和稳态,再用模型预测控制进行路径跟踪.邹旭东等[11]通过监测模型预测参考量,求出最优转向角及附加横摆力矩,从而改善路面状况较差时容易发生侧滑的问题.Yao等[12]针对纵向速度变化的实际情况,在模型预测控制中加入纵向补偿,以实现降低跟踪误差的目的.文献[13-14]针对避障引入车宽等参数建立环境包络线,针对跟踪稳定性建立侧偏角与横摆角速度包络线,从而以安全的方式稳定车辆或避开障碍物.
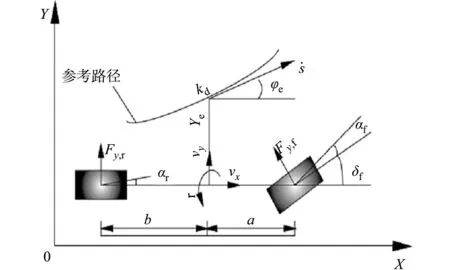
图1 车辆动力学模型Fig.1 Vehicle dynamics model
针对自动驾驶安全性与实时性,短步长能确保跟踪精度,而长步长能保证在高速行驶中有足够的预测范围,本文设计变步长模型预测控制器,使车辆在高速行驶时能有足够的、准确的预测范围.
1 动力学模型

(1)
式(1)中:Iz为惯量.
在高速行驶状态下,前轮转角一般较小,所以进行小角度假设:sin(δf)≈δf,cos(δf)≈1,并对航向偏差进行小角度假设:sin(φe)≈φe,cos(φe)≈1.设置kd为附加输入,有
(2)
2 模型预测控制器设计
由于预测控制需要对未来一段时域进行预测,所以需要设置预测步长及预测时域,如果全部都是短步长,虽然会提高每步的精确性,但是预测范围小;如果全部都是长步长,预测范围变大,但却会损失每一步的精确性.
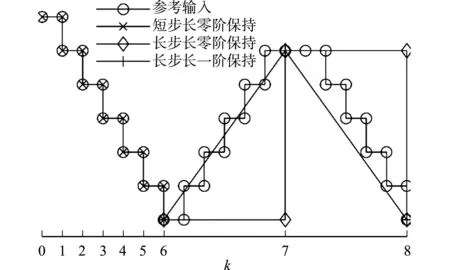
图2 离散化对比图Fig.2 Discretization comparison diagram
2.1 模型离散

(3)

(4)
式(4)中:A1=I5+At1,I5为五阶单位矩阵;t1为短步长;B11=B1t1;B12=B2t1.
由式(6),有
x(k+1)=A1x(k)+B11u1(k)+B12u2(k).
(5)

(6)

(7)
(8)
由于一阶保持离散需要获取下一状态量,如果输入未知则会出现问题,但如果模型预测控制同时计算预测时域内所有输入,则能有效解决这个问题.
2.2 约束条件
为了防止车辆在进入非线性区域失稳,要对关键参数进行约束,这样能有效保证车辆行驶稳定性.轮胎侧偏角-3°≤α≤3°;横向加速度约束ay≤|μg|,μ为道路摩擦系数;质心侧偏角约束-10°≤β≤10°(干燥路面),-2°≤β≤2°(冰雪路面).
2.3 目标函数
目标函数设置为
(9)
式(9)中:Q,R为各部分的权重系数;ρ为松弛因子权重系数;ε为松弛因子;δf,min,δf,max,Δδf,min,Δδf,max分别为车辆前车轮最小、最大控制量及最小、最大控制增量的约束;Ye,max,Ye,min,φe,min,φe,max分别为横向轨迹偏差最大、最小约束及航向角偏差最小、最大约束.
利用CVXGEN鲁棒性好、计算能力强、效率高的特点进行优化计算[15-16].
3 仿真实验
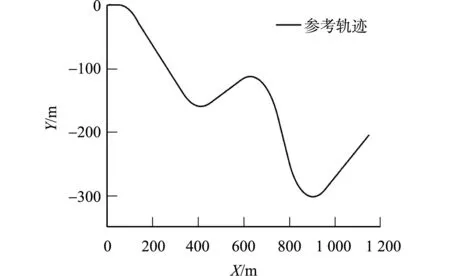
图3 车辆行驶参考轨迹Fig.3 Reference track of vehicle driving
为保证道路跟踪的精度,选取短步长为0.02 s,而对于长步长选择主要考虑高速状态.根据高速公路道路通行特别规定,当车速低于100 km·h-1时,应当与同车道前车保持不小于50 m的安全距离.文中研究的最大速度为90 m·h-1,因此,安全距离为50 m.由于长步长时域设计为10,则选取长步长为0.20 s,以保证能达到安全预测距离.为了验证设计的变步长模型预测控制器对路径跟踪的效果,利用Carsim的动力学模型及Matlab的控制器模块进行联合仿真验证,车辆行驶参考轨迹,如图3所示.
3.1 实时性仿真
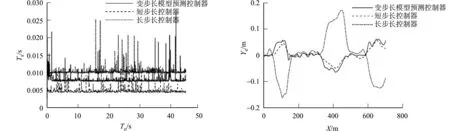
为了验证变步长模型控制器的实时性,选取了60,90 km·h-1两个速度,并分别对短步长、长步长及变步长进行仿真验证.实时性对比图,如图4所示.图4中:To为仿真时间;Ts为每次仿真计算时间.
(a) 60 km·h-1的仿真时间 (b) 60 km·h-1的横向偏差
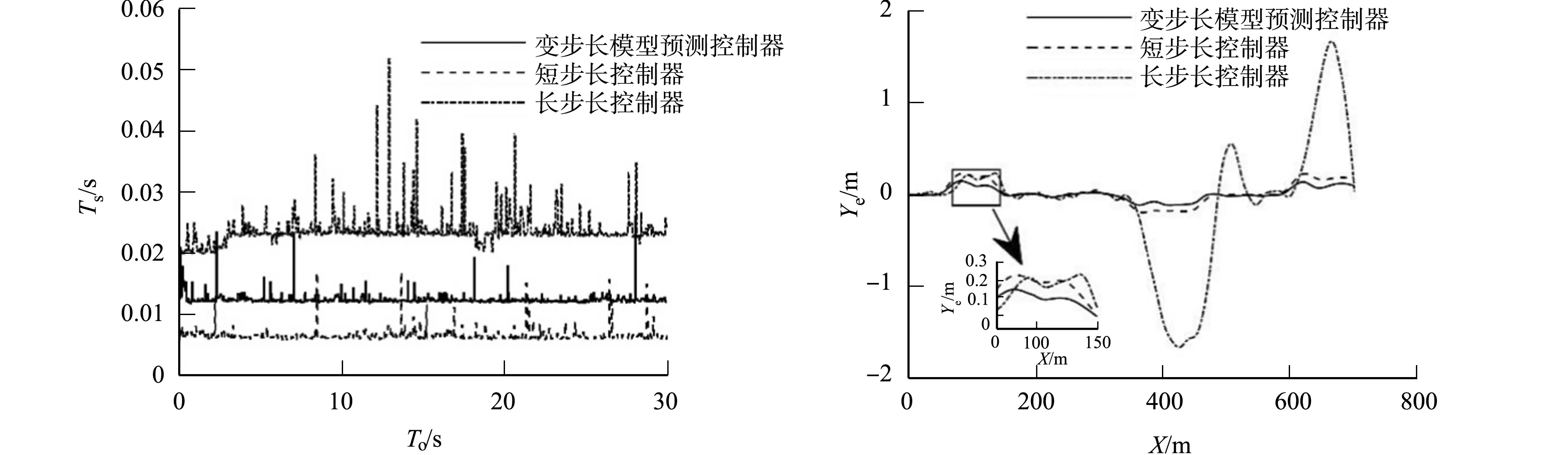
(c) 90 km·h-1的仿真时间 (d) 90 km·h-1横向偏差图4 实时性对比图Fig.4 Real-time comparison charts
由图4可知:变步长模型预测控制器的仿真时间处于短步长与长步长之间,当速度为90 km·h-1时,仿真时间在0.02 s以下,保证了实时性的需求.由图4(b)可知:在60 km·h-1常规速度下行驶时,较小预测范围也能满足路径跟踪的需求,短步长控制器跟踪效果稍优于变步长模型预测控制器,而长步长控制器在转弯路径已经出现较为明显的偏差.由图4(d)可知:在90 km·h-1较高速度下行驶时,短步长控制器由于预测范围受限,在弯道跟踪偏差增大,长步长控制器由于步长过大,在跟踪时误差已经超过1 m,而变步长模型预测控制器的跟踪误差增长较小,跟踪效果优于短步长控制器.
3.2 不同行驶速度跟踪仿真
选取正常路面条件,对路面附着系数为0.9,行驶速度(v)分别为30,60,90 km·h-1的情况进行仿真验证.不同速度跟踪效果图,如图5所示.
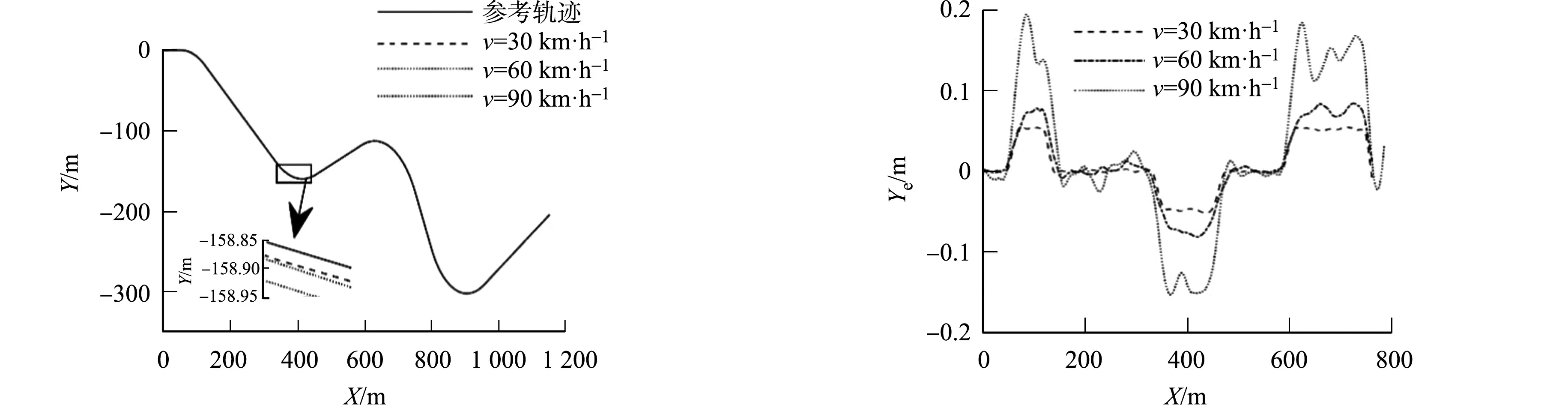
(a) 行驶轨迹 (b) 横向偏差
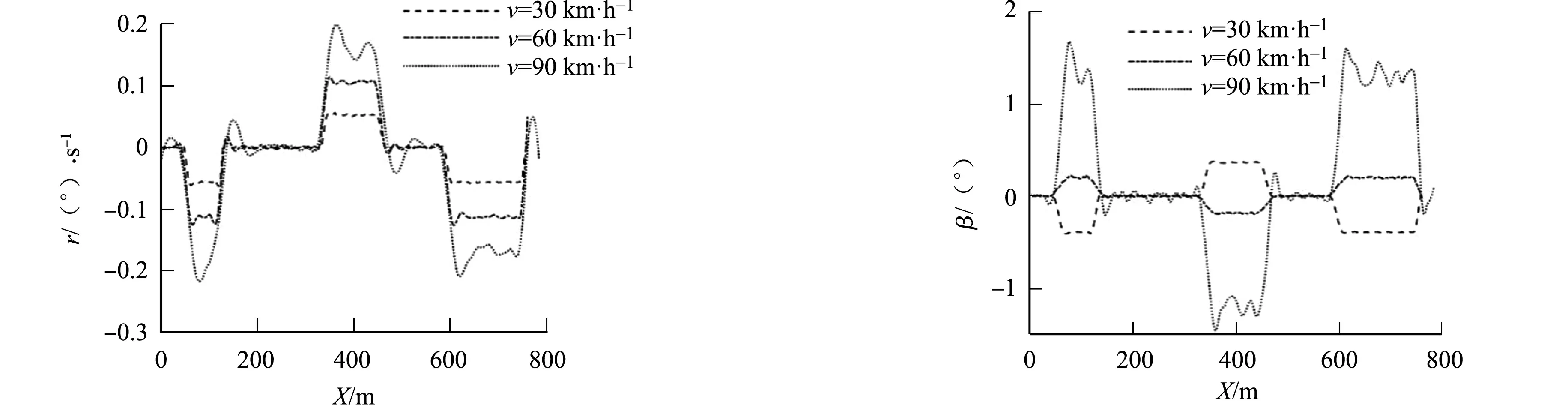
(c) 横摆角速度 (d) 质心侧偏角 图5 不同速度跟踪效果图Fig.5 Different speed tracking effect diagrams
由图5(a),(b)可知:3个不同速度在直线行驶路段均保证了一个较小的横向偏差;在弯道路段时,30,60 km·h-1时能够保证横向偏差在0.1 m以下,即使在90 km·h-1的高速行驶状态下,最大横向偏差也在0.2 m以下,并能很快调整到稳定状态,说明控制器的跟踪效果较好.由图5(c),(d)可知:车辆横摆角速度在直线行驶时能稳定,90 km·h-1弯道行驶时横摆角速度也不超过0.2 (°)·s-1,质心侧偏角也在约束范围内小幅度波动,保证了车辆在行驶途中的舒适度与稳定性.
3.3 不同道路条件跟踪仿真
跟踪控制不仅要求在干燥路面有较好的效果,也要求在冰雪路面等恶劣路面有稳定的跟踪性能,为了验证控制器对不同路面条件的跟踪控制效果,通过改变道路摩擦系数进行仿真验证.道路摩擦系数(μ)为0.3,0.5和0.8,速度设置为60 km·h-1时的跟踪效果图,如图6所示.

(a) 行驶轨迹 (b) 横向偏差
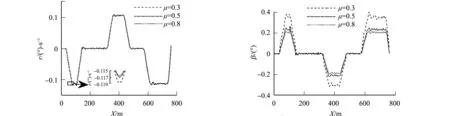
(c) 横摆角速度 (d) 质心侧偏角图6 不同道路跟踪效果图Fig.6 Different road tracking effects diagrams
由图6可知:在道路环境较差时,控制器的控制效果会受一定影响,需要更长距离才能保证路径偏差趋于零,但跟踪偏差均在一个较小值,能够保证车辆路径跟踪的准确性;由于加入道路曲率、质心侧偏角约束等参数,保证了车辆在不同道路条件下能有效防止滑移并有较好鲁棒性,其航向角也能快速调整,在后面的跟踪控制仅产生较小抖动,确保了车辆行驶的稳定性.
4 结束语
通过结合长、短两种步长,添加质心侧偏角约束、转向角约束等参数限制车辆行驶状态,且引入道路曲率作为附加输入,在不失去车辆高速行驶的安全预测范围的情况下,保证了车辆路径跟踪精度并降低计算需求,提高实时性.最后,利用Carsim和Matlab/Simulink联合仿真进行验证.仿真结果表明:当车辆行驶速度为低速时,短步长控制器有很好的跟踪效果与实时性,但是当速度达到高速状态时,变步长模型预测控制器的跟踪效果优于短步长控制器,并且其仿真时间也较低,满足了实时性的需求;在不同速度条件下,加入道路曲率等参数的变步长模型预测控制器具有较好的跟踪效果,并且能够快速稳定,面对恶劣路面条件也能有较好的跟踪性能,在一定程度上降低了滑移,航向角也不会产生较大波动,保证了乘坐的舒适性.
猜你喜欢
新课程·中学(2019年7期)2019-09-17
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24
物理教学探讨(2018年1期)2018-02-13
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
物联网技术(2015年10期)2015-11-10
中学生数理化·高考版(2008年2期)2008-11-01
