超高频RFID不同信号特征参数的室内定位方法
2022-01-21 05:10黄凤英夏靖波
福州大学学报(自然科学版) 2022年1期
黄凤英,夏靖波
(厦门大学嘉庚学院,福建 漳州 363105)
0 引言
随着无线技术的发展,基于超高频射频识别(radio frequency identification,RFID)的定位系统可以从附带低成本、易于部署的RFID标签上获得物体的位置信息,并为室内物品位置定位或跟踪提供有效的解决方案.在近年来的实际应用中,超高频RFID技术可以通过几个固定天线或虚拟天线阵帮助跟踪在传送带上的移动物品[1],可以通过智能图书馆或超市中配备超高频RFID阅读器的自动化机器人帮助查找放错的书籍或商品[2],还可以利用人员在移动过程中,对超高频RFID通信链路的多普勒频偏影响来了解人员运动轨迹[3].受这些重要应用的启发,室内定位需求越来越大.
根据超高频RFID系统的通信原理,阅读器和标签之间通过无线射频信号进行通信,因此可以根据通信过程中的不同信道特征参数来估计待测标签的位置.目前用于定位的信道特征参数主要基于以下4类: 基于接收信号强度(received signal strength indicator, RSSI)[4],基于到达相位(phase of arrival,POA)[5]或者基于到达相位差(phase difference of arrival,PDOA)[6],基于到达时间(time of arrival,TOA)[7]或者基于到达时间差(time difference of arrival,TDOA)[8],以及基于到达角度(angel of arrival,AOA)[9].在基于这些信道特征参数进行标签定位过程中,为了进一步提高定位精度,研究者们提出了不同的定位处理方法,如几何定位法,指纹定位法,全息图法等.但考虑到实际应用环境复杂、多径传播等不确定性因素仍然对定位精度产生较大影响.因此,在尽可能降低算法复杂度和成本下,为进一步保证定位精度和准确度,基于超高频RFID的室内定位技术仍需要不断地改进和完善.
1 标签定位特征参数
在超高频RFID的室内定位中,研究人员利用接收信号强度、到达相位、到达时间和到达角度等信道特征参数信息与目标位置建立相应关系,从而估算出待测标签位置.
1.1 信号强度
基于接收的信号强度[10]的标签定位方法以自由空间传播模型或路径损耗模型为原理,通过阅读器测量标签射频信号强度从而估算出待测标签的位置[11].
Friss电磁波自由空间传播模型指出,标签与阅读器之间距离为d时,其反射的电磁波能量PB为

(1)
其中:PR表示阅读器的发射功率;GRS表示阅读器的发射天线增益;σ表示标签反射电磁波的能力度量,其值主要取决于标签自身的物理特性.
阅读器天线与标签距离为d处的功率密度Sd
(2)
阅读器接收天线的增益GRR与阅读器接收天线的有效面积AR关系为
GRR=4πAR·λ-2
(3)
其中,λ表示信号的波长.因此,阅读器天线接收到的标签反射功率PRB为
(4)
通常情况用阅读器接收到的信号强度值RSSI来表示相对应的接收功率PRB[12-13],公式(4)可变成

(5)
从公式(5)可看出,信号强度与标签到阅读器之间距离d的四次方成反比.所以在自由空间中,根据该模型即可估算出阅读器与标签之间的距离.但由于室内环境通常比较复杂,自由空间的传播模型并不适用,因此对数路径距离损耗模型被提出用于障碍物、移动物体等多径效应较强的室内环境,该模型为

(6)
其中:d0表示已知参考标签与阅读器的距离;PL(d0)表示阅读器在自由空间中与标签距离为d0时所接收到的信号功率;n是路径损耗指数,取值依赖于系统环境,用来表示路径损耗随着距离增加的系数;Xθ是标准偏差为θ并服从正态分布的随机误差,用于表示环境噪声.
若阅读器发射功率为PR,与阅读器天线距离为d处的标签反射功率为PB,则有

(7)
阅读器接收到与天线距离为d的标签反射功率为PRB,则有

(8)
最后用阅读器天线接收到的RSSI来代替PRB.由此可知,基于对数路径距离损耗模型可以通过已知位置的参考标签计算出待测标签的距离.
基于接收信号强度RSSI的经典算法有LANDMARC[4]、VIRE[14].在此基础上,Huang等[12]提出了三角定位方法,Zhao等[13]提出基于聚类策略的定位方法;而OTrack则建立了识别暂态关键区域的概率模型[10],Yang等[15]提出一种基于非线性支持向量回归和粒子群优化的方法来定位目标标签位置.然而,在真实的RFID应用场景中,由于室内空间环境的噪声及多径路径干扰,影响接收信号的RSSI值,给基于RSSI定位系统的定位精度带来巨大挑战,所以误差处理是基于信号强度进行定位的一个重要环节.
1.2 射频相位
有些阅读器可支持获取相位参数指标,如ImpinJ R420[16],其接收信号的相位值分辨率可达0.001 5 rad,可计算出理论距离分辨率为0.038 mm[17].因此,相对于RSSI,相位对信号传播距离比较敏感.
在阅读器与标签进行反射链路通信时,当阅读器天线发送某一频率f的载波信号后,又将接收到经标签反射回的信号,可得出相位值与距离的关系如下

(9)
其中:λ是载波波长;dreader_tag为阅读器到标签的距离;c为光速;t为阅读器发射信号与接收到信号的时间差;φ为接收信号和发射信号的相位差. 假设阅读器发射信号的初始相位为零,则φ即为标签接收信号的到达相位.再将式(9)变为
(10)
但实际情况下,相位值φ是一个周期函数,周期为2π,即2nπ<φ<2(n+1)π, 0<ωt<2π,而阅读器调制解调得到的相位值φ′仅为相位主值,因此有
|φ-φ′|=2nπ
(11)
实际应用中由于n未知,所以只通过式(11)无法直接准确得到距离.只有当相位值在单周期内时,即

(12)
得到的测距结果才是正确的,因此最大不模糊距离为
dreader_tag_max=λ/2
(13)
由此可知,简单依靠式(10)进行相位测距,其定位距离范围是有限的[5].为了消除整周期相位模糊的影响,多组相位测量差值(PDOA)方法被提出.如,Han等[18]利用标签在不同位置处所产生的相位差,来估计多普勒频偏,从而对标签移动速度进行测算;Povalac等[6]和Qiu 等[19]利用不同频率的载波对标签进行通信时所产生相位差进行测距.近年来,利用接收信号的相位特征参数进行室内定位,在精度上取得了很大的突破,由此受到越来越多研究者的关注.
1.3 信号到达时间

图1 基于信号到达时间的定位模型Fig.1 Location model based on TOA
基于信号到达时间(TOA)的定位方法,其主要原理是根据不同阅读器接收到标签返回的信号时间差来估算两者之间的距离,再通过相关算法进行待测标签位置估算.
已知从阅读器发射信号到标签接收信号的时间差为t,射频信号的传播速度为vp(自由空间vp等于光速c),从而得到阅读器与待测标签之间的距离d为
d=vpt
(14)
同样,用该方法计算出每个阅读器与待测标签的对应距离.基于信号到达时间的定位模型如图1所示.
已知阅读器R1、R2、R3的坐标分别为(x1,y1)、(x2,y2)、(x3,y3),设待测标签T的坐标为(x,y),则根据几何公式可得

(15)
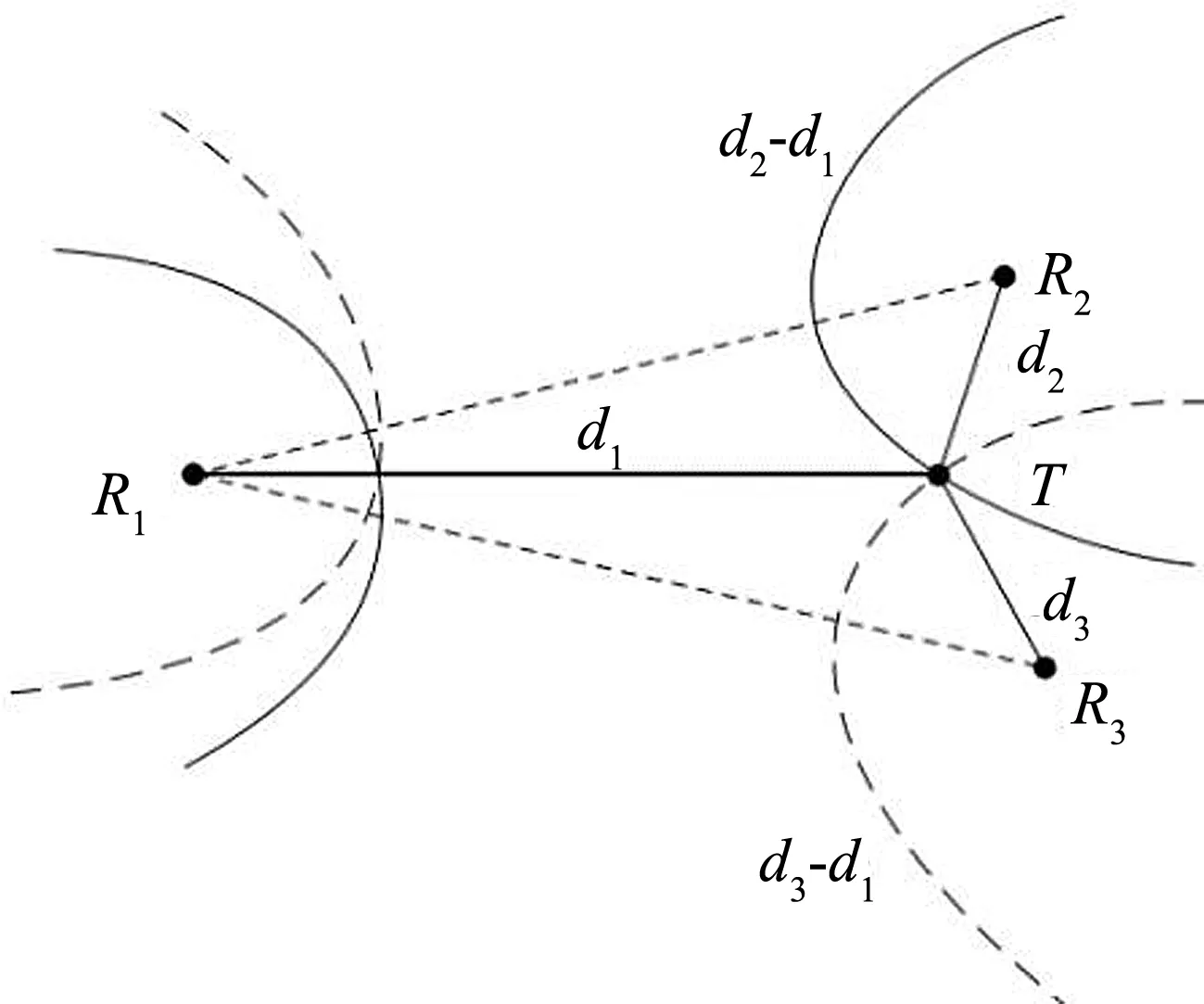
图2 基于信号到达时间差的定位模型Fig.2 Location model based on TDOA
由式(15)可解出x和y值,该值即为目标标签的位置坐标.然而,该方法的前提是阅读器和目标标签均能实现时间同步,且要求时钟具有纳秒级别的精度[7];否则,由于信号传播速度很快,一点时间偏差都将引起较大的距离误差.
Stelzer等[8]在TOA方法基础上利用目标标签信号到达多个阅读器之间的相对时间差来计算它们之间的相对距离,然后用已知位置关系的阅读器计算出绝对距离.基于时间到达差TDOA的定位方法,通常采用的是双曲线定位方法, 其定位模型如图2所示.
若用di_j表示目标标签分别与第i个阅读器和第j个阅读器之间的距离差,则根据式(15)可得
di_j=di-dj

(16)
相应地,可计算d2_1和d3_1分别为

(17)
根据以上公式可推出

(18)
根据式(16)与(18)可得到以下公式

(19)
通过以上推导可以看出,式(19)为一个以x,y,d1为未知数的线性方程组,可以再通过最小二乘法或加权最小二乘法来计算目标标签的位置.
无论是基于 TOA 还是 TDOA 的定位方法,都要用到射频信号在传播过程中的时间差值,因此要求阅读器和标签之间的时钟能够同步,且时间精度高[8].
1.4 信号到达角度

图3 基于AOA 的定位模型Fig.3 Location model based on AOA

图4 相控阵天线原理Fig.4 Principle of phased array antenna
基于AOA的定位方法一般布置2个或2个以上的阅读器,对于每一个阅读器都可以通过天线获得标签的信号角度信息;也有些阅读器集成有阵列天线,可以用一个阅读器的不同天线单元获取标签信号角度信息,并以它们信号的角度方向所产生的交点来确定标签位置[9].基于AOA的定位模型如图3所示,R1和R2是两个位置已知的阅读器,坐标位置分别为(x1,y1), (x2,y2),T为待测标签,根据几何原理可知

(20)
由式(20)可计算出x,y值,从而计算出标签所在的位置.使用该测量方法仅需要测得角度就可以算出距离,简单易操作,但很多阅读器并不能直接获得角度信息,近年来,有一些研究者结合相控阵天线理论[20-21],为在实际情况下开展标签到达角度的定位提供了新的思路.
相控天线原理如图4所示,λ表示载波波长,d代表天线阵元之间的距离,由此可计算相邻阵元间的相位差Δφ为
( 21)
该天线的辐射角度θ可由式(21)计算为

(22)
阵列天线的阵元间距和阵元数量通常是固定的,因此,粱笑轩等[21]提出一种基于相控阵的距离自由标签定位方法(phased array based range free tag localization,PATL),其通过移相器来调节不同的辐射波束角度,然后通过对目标平面进行依次扫描,并统计标签出现的次数,最后利用加权算法进行标签的二维位置定位.
以上基于AOA的定位方法虽然在原理上比较容易理解,但实际应用过程中对天线设备要求比较高,一般需要在阅读器上安装阵列天线,才可达到较好的定位效果.
2 标签定位处理方法
通过前一节对4种不同信号特征参数定位方法的分析可知,无论采用哪一种方法进行标签距离定位,都或多或少地存在诸如定位系统复杂、易受干扰、精度低等的不足.为了进一步提高定位准确度和精确度,研究者们提出了数种标签定位处理方法.目前常见的定位处理方法可以大致分为几何定位法、指纹定位法、全息图法等[22].
2.1 几何定位法
几何定位法主要是通过所获得信号参数信息建立相对应的线性或非线性方程组,然后通过求解方程组的值,来计算待测标签位置,如公式(5)、(8)、(15)、(18)、(19).对于求解建立的非线性方程组,大多采用最小二乘法、梯度法等[22].如Hightower等[23]基于信号强度与距离的关系,采用最小二乘迭代法来对标签位置进行估算;文献[24]是基于到达时间差和一种梯度博弈标签位置的估计方法;Liu等[25]提出采用双曲线进行递归计算来缩小可能区域范围,最后估算出标签位置;RF-Scanner通过相位剖面上的双曲线拟合曲线来获取标记位置[26].
2.2 指纹定位法
指纹定位法的思想一般分为两个阶段: 一是建库,二是匹配.首先在环境中部署大量的已知位置的标签,通过阅读器分别获取它们的信号强度值,并存入后台数据库中,然后将接收到待测标签的信号强度值一一和库中的强度值进行比对,最后选择信号强度值最接近的已知标签位置作为待测标签位置.在指纹定位法中,大部分研究者采用机器学习理论思想,如K邻近算法 (K-nearest neighborhood,KNN)[4, 27]、神经网络算法[28-30]、卡尔曼滤波法[31]、最大期望估计[32]、贝叶斯概率算法[33]和支持向量基[34]等.另外,Han等[35]为降低部署成本和系统复杂度,在建立指纹库时提出通过插值法拟合虚拟标签.
2.3 全息图法
全息图法通常将待搜索的二维平面或三维空间分割成为一个个位置像素点,并通过阅读器天线在不同位置上采集标签相位信息,每个天线测得的实际相位值与天线到每个像素点的理论相位到建立复指数函数,根据计算得到的复指数大小来估算待测标签的位置.研究者们[17, 36-38]通过标签的运动移动或阅读器天线的移动来模拟虚拟阵列天线,并获取对应的标签相位信息,从而构造不同全息图来实现高精度的定位.例如,Tagoram提出一种差分增强全息图(differential augmented hologram,DAH)定位方法[17]来减轻环境热噪声和标签多样性的影响;Shangguan等[2]提出了一种新的多径抑制技术,即创建具有多载波频率数据、鲁棒性更好的全息图;FaHo设计了一种鲁棒性更好的全息图,探讨了目标标签可能存在的所有位置的可能性,并提出将全息图与深度卷积神经网络算法相融合来抑制多路径效应[36].
以上3种定位处理方法由于算法复杂度不同,导致定位实时性也不同.一般情况下,指纹估计法相比几何估计法在复杂的室内环境下能够获得较高的定位精度,但由于离线阶段指纹库的建立时间花费较多,指纹匹配算法的计算量较大,因此,整体的定位实时性也较差.而全息图方法是通过遍历搜索空间的方式,相比指纹估计法其免去了指纹库的建立过程,定位实时性更能满足要求.
3 定位方法比较
为了更加全面了解超高频RFID室内定位的关键技术,本研究从测距类型、定位处理方法、精度、基础设施等方面,对基于不同特征参数的定位方法进行简要对比[39],其对比结果如表1所示.

表1 不同信号特征参数的定位方法对比
4 总结与展望
通过对文献进行分析,可将超高频RFID定位类型分为两大类: 测距法和非测距法.测距法利用无线信号的不同特征参数,如信号强度,TOA,TDOA和相位来估计距离和角度,然后根据三边、多边、AOA等计算出目标的位置.非测距法主要基于场景分析,而不是直接使用距离和角度,该方法通常需要参考标签来预先建立指纹数据库,目标位置可以通过匹配射频全息图来预测,也可以通过指纹训练的机器学习模型来预测.一般情况下,非测距法比测距法具有更高的精度和更好的抗干扰性,但在设施上需要更多的成本.无论哪种定位类型,离大规模实际应用仍存在一定距离.
基于多参数的混合算法和定位处理方法可以改善特定环境下性能的不足,或将为日后应用提供更佳的定位方案.在此,将对基于RFID室内定位技术总结以下几个发展方向.首先,单一信号特征参数的测距定位模型具有较多的局限性,且没能最大化地利用标签反射信号的全部特征信息,因此,研究者开始提出结合多种特征参数信息的定位方法,即从单一定位特征参数转向多个特征参数发展,如,利用在几个测量点收集的相位差来估计接收信号的到达方向角,进而对待测标签进行定位.其次,有些研究者在现有的定位处理方法上进行改进,如将测距法转向非测距法,从几何定位方法、指纹定位方法向全息图法或其他方法发展.再者,从基础设施构成来看,系统将从大量参考标签、多阅读器、多天线等向移动标签、移动阅读器、虚拟天线阵等低成本方向发展.最后,从实际应用前景来看,更多从单一的室内物品位置定位及追踪向与增强现实、虚拟现实、人机交互等多学科相结合方向发展.
未来,随着超高频RFID室内定位技术的不断发展,超高频RFID将有望为开展物体空间信息感知技术提供新的发展机遇.当集成有阅读器的智能机器人或设备具有空间位置感知能力时,结合增强现实、虚拟现实等,人们生产和生活的智能化程度势必达到更高水平.
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
光子学报(2022年1期)2022-02-22
中成药(2022年1期)2022-01-27
英语世界(2020年10期)2020-11-06
英语世界(2020年2期)2020-03-08
商业文化(2017年28期)2017-11-01
计算机应用(2017年8期)2017-10-21
计算机技术与发展(2017年6期)2017-06-27
科技资讯(2015年19期)2015-10-09
发明与创新·中学生(2015年9期)2015-09-05