
基于图像分割的目标检测方法对比研究
2022-01-22 10:34刘天舒,房建东,赵于东
计算机时代 2022年1期
刘天舒,房建东,赵于东
摘 要: 奶牛行为识别过程中,奶牛目标精准检测是重要前提。一般的奶牛目标检测采用纹理和颜色信息进行识别,对于长时间静止和复杂背景干扰的目标存在目标丢失和检测不精准问题。针对上述问题,文章将图像分割方法和区域面积剔除方法相结合,实现复杂环境下的静止奶牛目标检测。实验结果表明,该方法达到97.4%的识别率。
关键词: 目标检测; 复杂环境; 图像分割; 区域面积
中图分类号:TP301.6 文献标识码:A 文章编号:1006-8228(2022)01-14-05
Comparative research on image segmentation based target detection method
Liu Tianshu1,2, Fang Jiandong1,2, Zhao Yudong2
(1. Inner Mongolia University of Technology, Hohhot, Inner Mongolia 010080, China; 2. Inner MongoliaKey Laboratory of Perceptive Technology and Intelligent System)
Abstract: In the process of cow behavior recognition, accurate detection of cow targets is an important prerequisite. Generally, cow target detection uses texture and color information for recognition. For targets that are static for a long time and interfered with complex backgrounds, there are problems of target loss and inaccurate detection. Aiming at the above problems, this paper combines image segmentation method with area removal method to realize the target detection of still cows in complex environments. The experimental results show that the method achieves a recognition rate of 97.4%.
Key words: target detection; complex environment; image segmentation; area
0 引言
目标检测是对视频中的移动目标进行定位的过程,目标检测技术有着非常广泛的应用。针对光照变化大、长时间静止和复杂背景干扰等问题,现有成熟的移动目标检测方法尚不能实现对复杂牛舍环境下牛只视频的有效检测。目前基于动态目标检测的算法有背景减除法、帧间差分法、高斯模型法、光流法等[1],可以实现动态奶牛目标的检测。
但是动态目标检测的方法不能很好地适应静态目标的检测要求,一旦静止下来休息、进食、饮水,上述这些方法都会存在目标丢失的现象,会将目标标记为背景,离实际应用还有一定的差距。针对以上问题本文进行如下研究:
⑴ 为了满足监控系统实时需求,研究牛只图像的快速分割算法,满足在无需人工操作情况下,自动利用图像信息进行图像增强和滤波处理,并根据图像颜色进行分割,以实现快速准确地提取牛只图像区域。
⑵ 针对图像分割不准确问题,采用基于目标区域面积大小的方式来剔除干扰目标,提高检测精准度。
1 基于自适应阈值的牛只图像快速分割算法
图像分割算法可以基于阈值、边缘、区域等不同原理实现。基于阈值的图像分割算法即图像的二值化处理,是一种基于灰度信息提取前景目标技术,是现有研究牛只图像分割算法中应用最多的方法,有着易于实现、性能稳定的优点。阈值分割,对牛只前景目标与背景对比度较强的图像,分割效果极好。对于对比度较弱的图像,可以先进行图像对比度增强,再采用阈值处理,也可以达到很好的分割效果。
1.1 灰度图像阈值分割
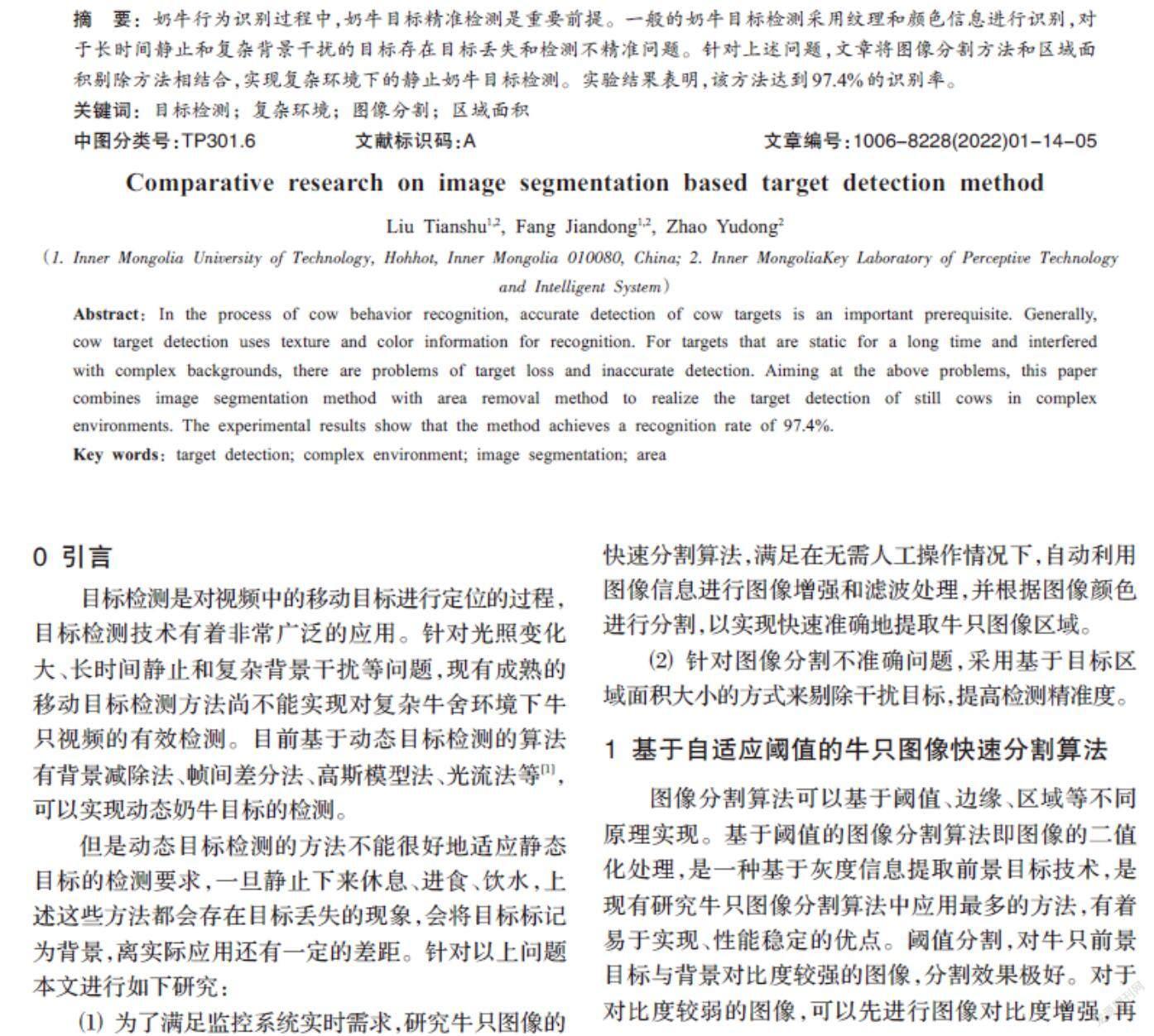
灰度阈值分割通常设定一个阈值用于区别图像中物体与背景之间的灰度差异,所有不小于灰度阈值的像素灰度值用白色255表示,否则灰度值用黑色0表示,这样就能实现目标和背景的分割,使得整幅图像显示为明显的黑白对比效果,有效地凸显出目标的轮廓,灰度图像阈值分割效果如图1所示。
分析图1(a)可以看出,地面暗区域和墙面的灰度值较大,由于牛只和墙面灰度值并没有出现较明显的区別,所以采用阈值分割可以将地面较暗区域分割出去,但是还有部分墙面被分割为前景。图1(b)为经过了AGCDW增强算法结合高斯滤波去噪处理后的阈值分割效果图,从中可以看出,预处理后在阈值T=40时,地面和栅栏分割为背景,前景目标只有少许墙壁和奶牛个体,效果较好。
1.2 Otsu阈值分割法
Otsu阈值分割法又称为最大类间方差法,其中t是使目标与背景两类方差最大的值。所选取的分割阈值应使前景区域的平均灰度、背景区域的平均灰度与整幅图像的平均灰度之间的差异最大。
设图像灰度级为N,[ni]为图像灰度级为i的像素点个数,对直方图进行归一化的计算公式如下:
[πi=niN] ⑴
对于前景和背景两类像素[If]、[Ib],前景与背景的分割阈值为t时,每一类出现的概率为:
[If=i=0tπi=wo] ⑵
[Ib=i=t+1N-1πi=w1] ⑶
前景和背景的平均灰度值计算公式如下:
[u0=i=0tiπii=0tπi=μtwo] ⑷
[u1=i=t+1N-1iπii=t+1N-1πi=μT-μtw1] ⑸
[μt=i=0tiπi] ⑹
[μT=i=0N-1iπi] ⑺
其中,[μt]为灰度级为t时的灰度累计值,[μT]为图像灰度级N范围内的灰度累计值。对于前景和背景像素,内部方差计算公式如下:
[σ20=i=0ti-u02πi/w0] ⑻
[σ21=i=t+1N-1i-u12πi/w1] ⑼
前景和背景点占图像比例分别为[w0]和[w1],均值分别为[u0]和[u1],那么图像的均值为[u=w0×u0+w1×u1]。建立目标函数,设t为分割阈值,[gt]最大时对应的t称为最佳阈值。
[gt=w0×u0-u2+w1×u1-u2] ⑽
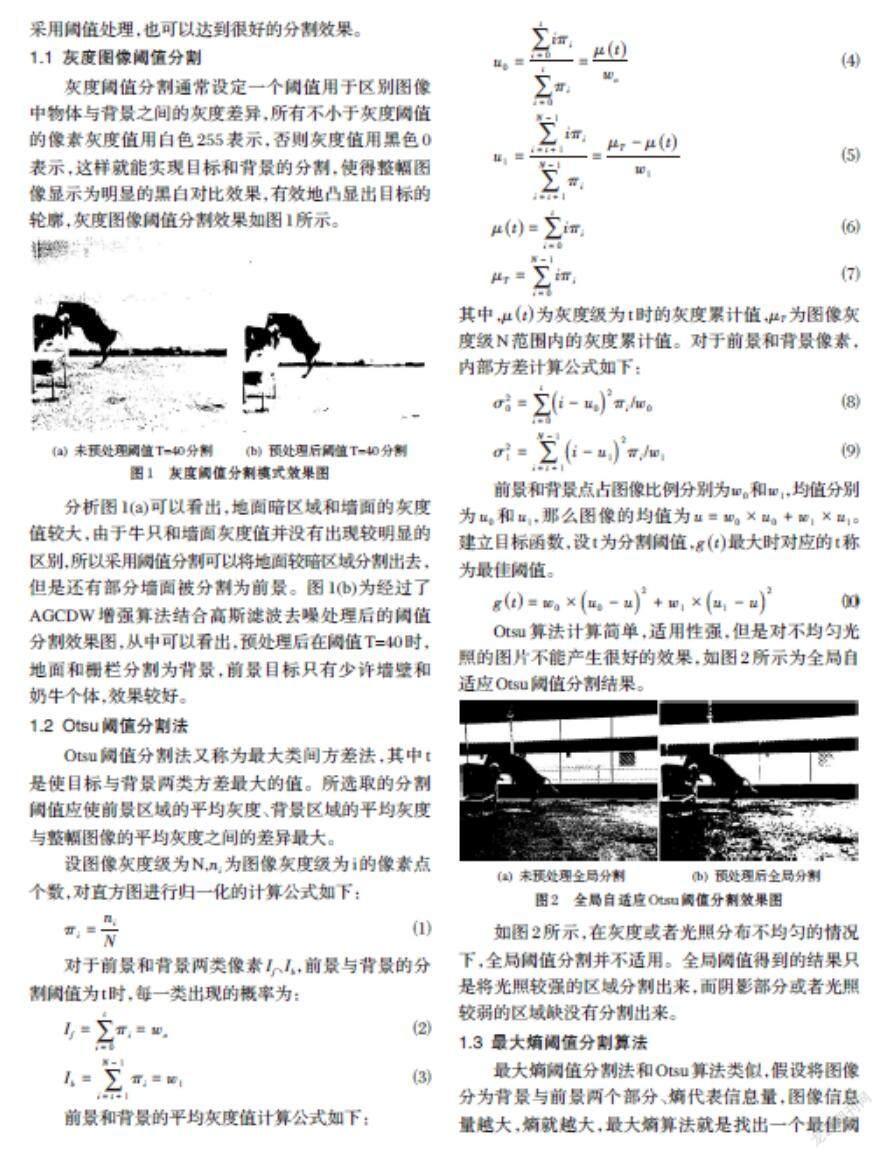
Otsu算法计算简单,适用性强,但是对不均匀光照的图片不能产生很好的效果,如图2所示为全局自适应Otsu阈值分割结果。
如图2所示,在灰度或者光照分布不均匀的情况下,全局阈值分割并不适用。全局阈值得到的结果只是将光照较强的区域分割出来,而阴影部分或者光照较弱的区域缺没有分割出来。
1.3 最大熵阈值分割算法
最大熵阈值分割法和Otsu算法类似,假设将图像分为背景与前景两个部分、熵代表信息量,图像信息量越大,熵就越大,最大熵算法就是找出一个最佳阈值使得背景与前景两个部分熵之和最大[2]。熵的定义公式如下:
[HD=-ppxlogpx] ⑾
设定分割阈值为t,[i=0L-1pi=1, pi≥0]。
T为[i∈0,1,…,t]的分布,B为[i∈t+1,…,L-1]的分布,具体形式为:
[T:p0pn,…,ptpn] ⑿
[B:pt+11-pn,…,pL-11-pn] ⒀
其中,[pn=i=0tpi]。
则两个概率密度的熵为:
[HT=-i=0tpipnlnpipn] ⒁
[HB=-i=t+1L-1pi1-pnlnpi1-pn] ⒂
在该阈值下,图形总熵为:
[HD=HT+HB] ⒃
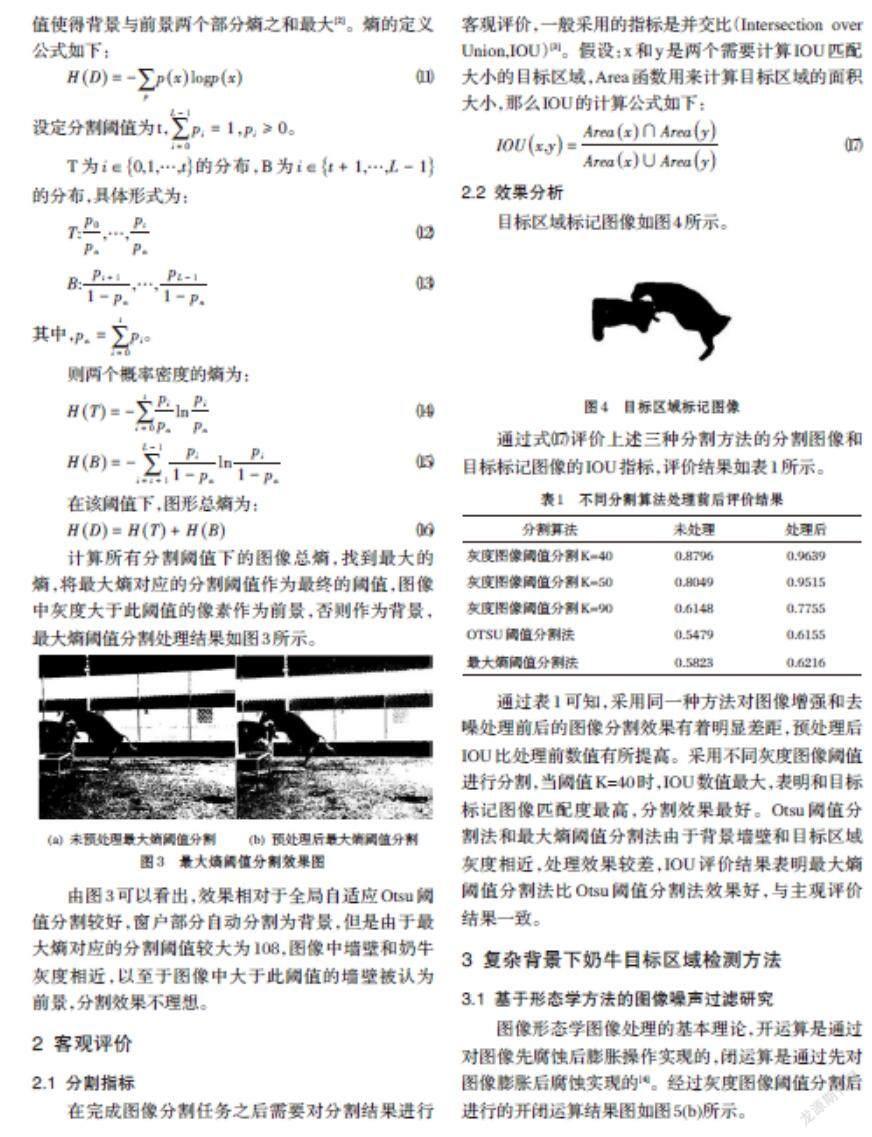
计算所有分割阈值下的图像总熵,找到最大的熵,将最大熵对应的分割阈值作为最终的阈值,图像中灰度大于此阈值的像素作为前景,否则作为背景,最大熵阈值分割处理结果如图3所示。
由图3可以看出,效果相对于全局自适应Otsu阈值分割较好,窗户部分自动分割为背景,但是由于最大熵对应的分割阈值较大为108,图像中墙壁和奶牛灰度相近,以至于图像中大于此阈值的墙壁被认为前景,分割效果不理想。
2 客观评价
2.1 分割指标
在完成图像分割任务之后需要对分割结果进行客观评价,一般采用的指标是并交比(Intersection over Union,IOU)[3]。假设:x和y是两个需要计算IOU匹配大小的目标区域,Area函数用来计算目标区域的面积大小,那么IOU的计算公式如下:
[IOUx,y=Areax∩AreayAreax∪Areay] ⒄
2.2 效果分析
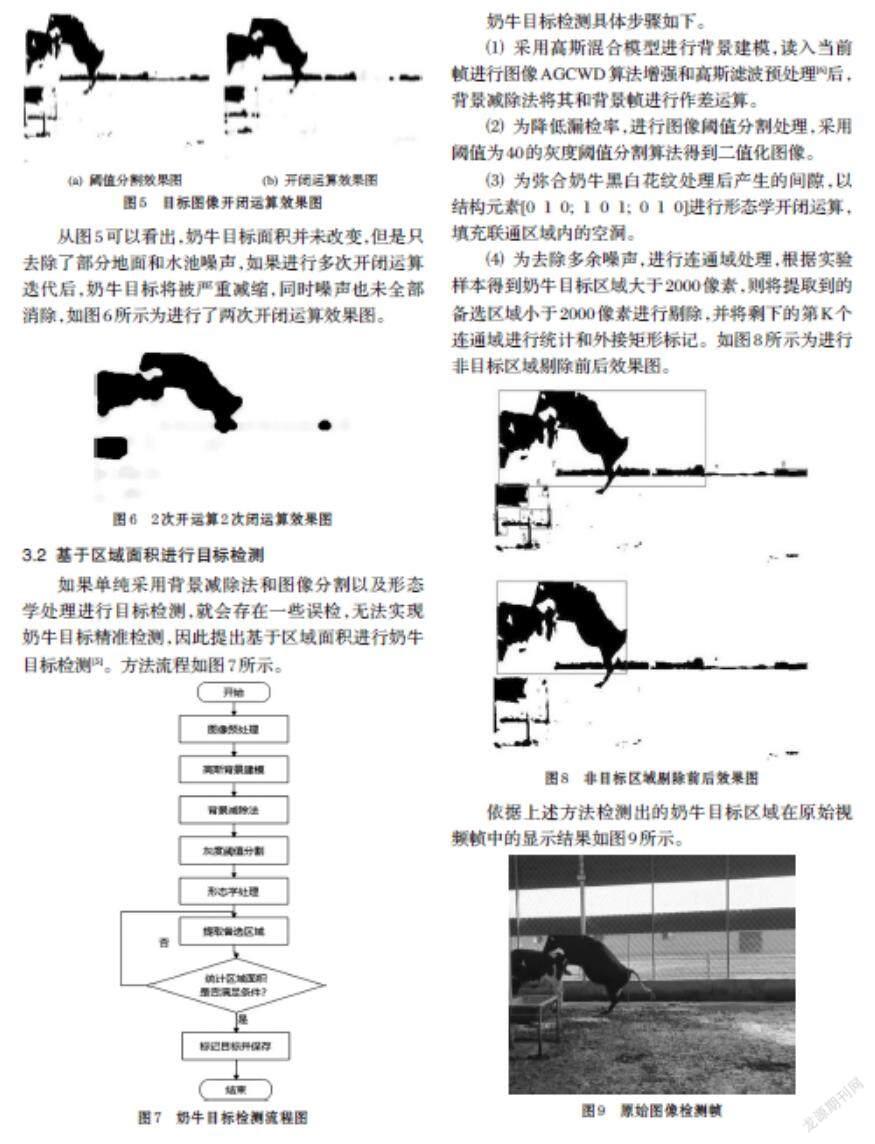
目标区域标记图像如图4所示。
通过式⒄评价上述三种分割方法的分割图像和目标标记图像的IOU指标,评价结果如表1所示。
通过表1可知,采用同一种方法对图像增强和去噪处理前后的图像分割效果有着明显差距,预处理后IOU比处理前数值有所提高。采用不同灰度图像阈值进行分割,当阈值K=40时,IOU数值最大,表明和目标标记图像匹配度最高,分割效果最好。Otsu阈值分割法和最大熵阈值分割法由于背景墙壁和目标区域灰度相近,处理效果较差,IOU评价结果表明最大熵阈值分割法比Otsu阈值分割法效果好,与主观评价结果一致。
3 复杂背景下奶牛目标区域检测方法
3.1 基于形态学方法的图像噪声过滤研究
图像形态学图像处理的基本理论,开运算是通过对图像先腐蚀后膨胀操作实现的,闭运算是通过先对图像膨胀后腐蚀实现的[4]。经过灰度图像阈值分割后进行的开闭运算结果图如图5(b)所示。
从图5可以看出,奶牛目标面积并未改变,但是只去除了部分地面和水池噪声,如果进行多次开闭运算迭代后,奶牛目标将被严重减缩,同时噪声也未全部消除,如图6所示为进行了两次开闭运算效果图。
3.2 基于区域面积进行目标检测
如果单纯采用背景减除法和图像分割以及形态学处理进行目标检测,就会存在一些误检,无法实现奶牛目标精准检测,因此提出基于区域面积进行奶牛目标检测[5]。方法流程如图7所示。
奶牛目标检测具体步骤如下。
⑴ 采用高斯混合模型进行背景建模,读入当前帧进行图像AGCWD算法增强和高斯滤波预处理[6]后,背景减除法将其和背景帧进行作差运算。
⑵ 为降低漏检率,进行图像阈值分割处理,采用阈值为40的灰度阈值分割算法得到二值化图像。
⑶ 为弥合奶牛黑白花纹处理后产生的间隙,以结构元素[0 1 0; 1 0 1; 0 1 0]进行形态学开闭运算,填充联通区域内的空洞。
⑷ 为去除多余噪声,进行连通域处理,根据实验样本得到奶牛目标区域大于2000像素,则将提取到的备选区域小于2000像素进行剔除,并将剩下的第K个连通域进行统计和外接矩形标记。如图8所示为进行非目标区域剔除前后效果图。
依据上述方法检测出的奶牛目标区域在原始视频帧中的显示结果如图9所示。
4 实验结果与分析
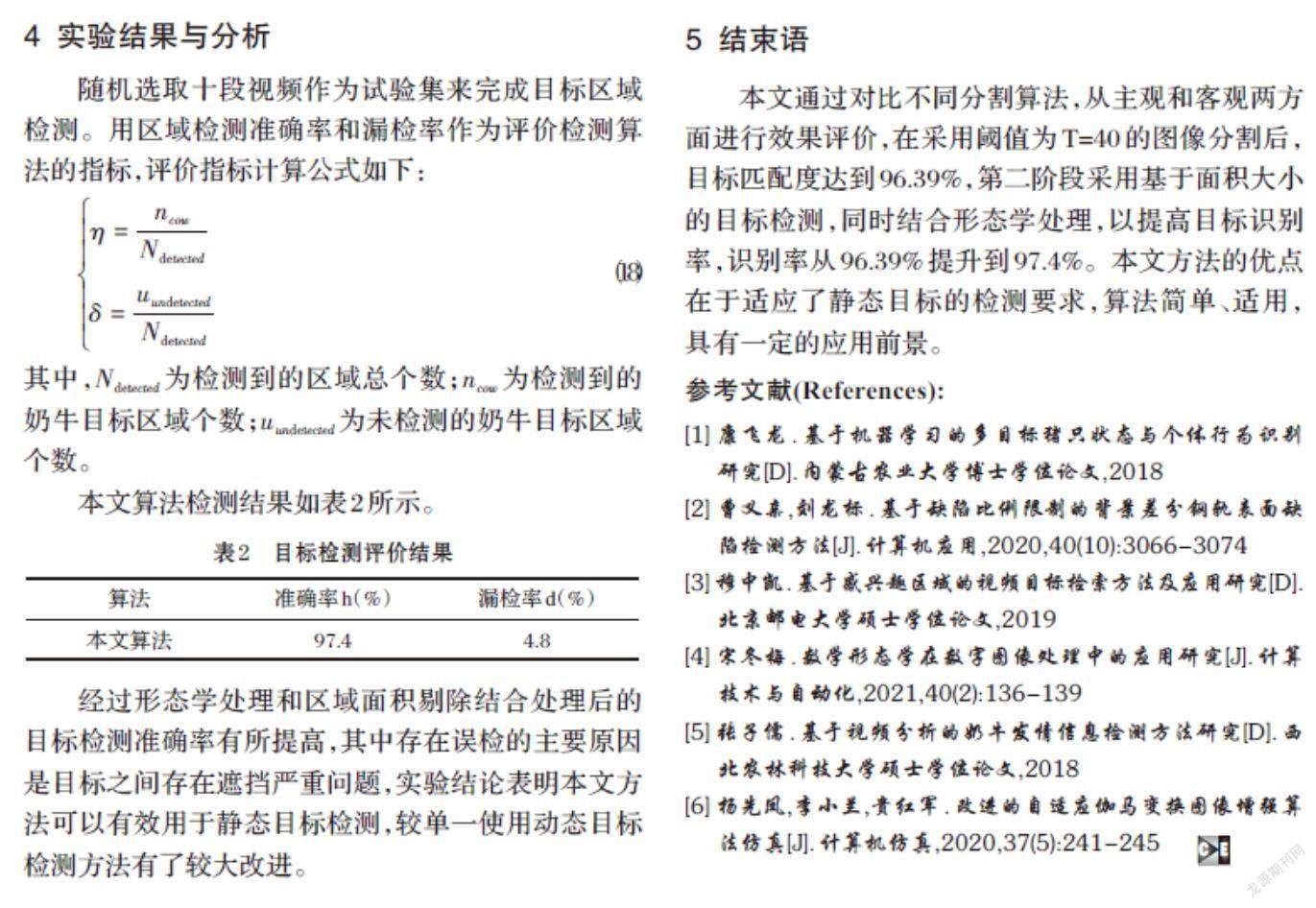
随机选取十段视频作为试验集来完成目标区域检测。用区域检测准确率和漏检率作为评价检测算法的指标,评价指标计算公式如下:
[η=ncowNdetectedδ=uundetectedNdetected] ⒅
其中,[Ndetected]为检测到的区域总个数;[ncow]为检测到的奶牛目标区域个数;[uundetected]为未检测的奶牛目标区域个数。
本文算法检测结果如表2所示。
经过形态学处理和区域面积剔除结合处理后的目标检测准确率有所提高,其中存在误检的主要原因是目标之间存在遮挡严重问题,实验结论表明本文方法可以有效用于静态目标检测,较单一使用动态目标检测方法有了较大改进。
5 结束语
本文通过对比不同分割算法,从主观和客观两方面进行效果评价,在采用阈值为T=40的图像分割后,目标匹配度达到96.39%,第二阶段采用基于面积大小的目标检测,同时结合形态学处理,以提高目标识别率,识别率从96.39%提升到97.4%。本文方法的優点在于适应了静态目标的检测要求,算法简单、适用,具有一定的应用前景。
参考文献(References):
[1] 康飞龙.基于机器学习的多目标猪只状态与个体行为识别研究[D].内蒙古农业大学博士学位论文,2018
[2] 曹义亲,刘龙标.基于缺陷比例限制的背景差分钢轨表面缺陷检测方法[J].计算机应用,2020,40(10):3066-3074
[3] 穆中凯.基于感兴趣区域的视频目标检索方法及应用研究[D].北京邮电大学硕士学位论文,2019
[4] 宋冬梅.数学形态学在数字图像处理中的应用研究[J].计算技术与自动化,2021,40(2):136-139
[5] 张子儒.基于视频分析的奶牛发情信息检测方法研究[D].西北农林科技大学硕士学位论文,2018
[6] 杨先凤,李小兰,贵红军.改进的自适应伽马变换图像增强算法仿真[J].计算机仿真,2020,37(5):241-245
猜你喜欢
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
中国高新技术企业(2016年33期)2016-12-27
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年24期)2016-11-14
电脑知识与技术(2016年24期)2016-11-14
科学与财富(2016年28期)2016-10-14
无线互联科技(2015年7期)2016-03-07
科技视界(2016年4期)2016-02-22
