面向智能驾驶感知盲区补充的传感器共享策略
2022-01-27 09:56罗明懿曹赛男李春海李晓欢周胜源
桂林电子科技大学学报 2021年5期
罗明懿,陈 倩,曹赛男,李春海,李晓欢,周胜源
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.柳州五菱汽车工业有限公司,广西 柳州 545007)
近年来,交通事故日益高发,事故伤害严重[1],智能驾驶技术已被证明是有效提高交通安全的关键技术之一[2]。智能驾驶的安全保障来自通过多种传感器对车辆周围交通场景的全面感知,但传感器具有其局限性,特别是感知区域被其他物体遮挡时会出现传感器感知盲区。基于V2X(Vehicle to everything)的传感器共享方案是弥补盲区的有效途径[3],高效合理地选择合适的车辆节点进行传感器共享以实现盲区补充是关键。目前在传感器共享领域的节点选择策略主要有3种:1)选择簇头作为共享目标,即簇头车辆向后方簇内节点共享自身信息[4-6];2)车辆节点将传感器数据上传到云服务中心,供他车取用[7-8];3)选择前车作为共享目标进行协同感知[9-12]。但当因动态交通流中存在大量节点而造成相互遮挡时,这3种策略都无法满足智能驾驶汽车对弥补盲区的需求。如何量化动态交通流中的传感器盲区,并据此进行共享节点的选择,成为亟待解决的问题。
鉴于此,在动态交通流中的智能驾驶汽车发起传感器共享时,首先分析车载传感器的感知盲区,提出了一种动态交通流中传感器感知盲区模型,随后,考虑补充车辆自身感知盲区的实际需求指标,基于感知盲区模型对候选车辆节点进行综合考量,提出了一种基于熵权法的传感器共享节点选择策略。
1 动态交通流感知盲区模型
在动态交通流中,不同的车辆密度决定了车辆在道路中的分布情况,即车辆之间的相对位置已经确定。如图1所示的单向路段,车辆向东行驶。设长度为L的路段上的车辆总数为n,路段上的车辆依次编号为1,2,…,n。令Xi表示第i辆车到第i+1辆车之间的距离,其中,i=1,2,…,n-1。对于足够大的n和L,道路宽度可以忽略,且该路口单位时间内车辆通过的次数服从参数为λ的泊松分布[13],其概率密度函数为
(1)
其中:k为单位时间内车辆通过某路口的次数;λ=n/L为单位长度路段中的车辆平均通过次数,简称车辆密度。式(1)表示单位时间内某路口通过的车辆数为k的概率。因此,车辆到达某路口的时间间隔服从参数为λ的指数分布,假设所有车辆车速相等,则车辆间距同样服从参数为λ的指数分布,其分布函数为
(2)
为保证安全,第i辆车行驶时应感知到安全距离dsafe内的道路环境[14],但因受前车即第i+1辆车遮挡,导致出现感知盲区。感知盲区定义为沿道路从遮挡位置到dsafe的矩形范围,即图1中实线框范围为感知盲区范围Ai,实线框面积为感知盲区面积。
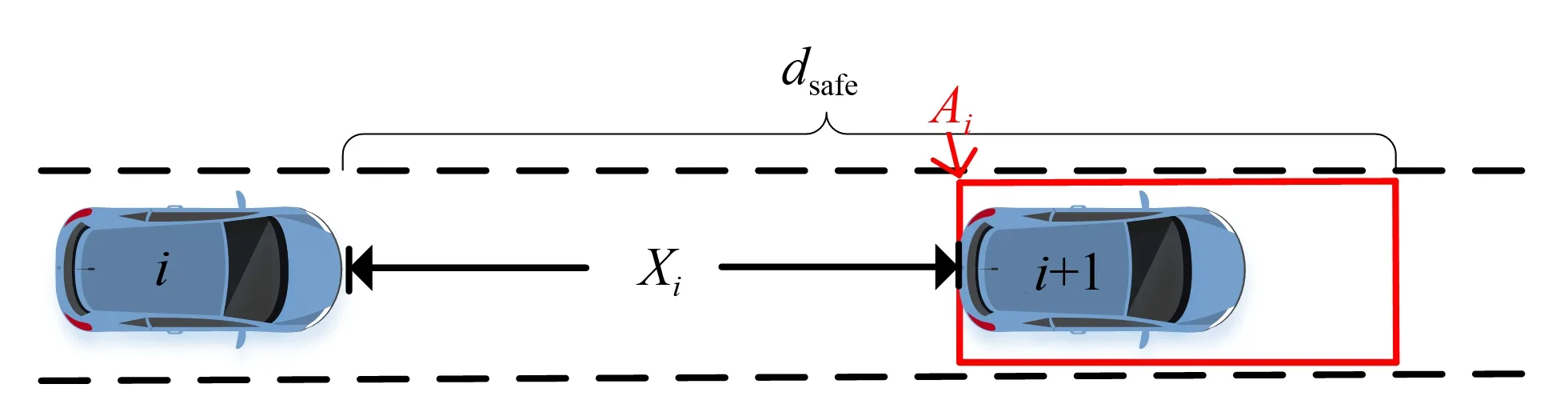
图1 感知盲区面积示意图
(3)
其中WR为道路宽度。令Y=(dsafe-X)WR,结合式(2),可得感知盲区面积的分布函数:
(4)
进而可得感知盲区面积的数学期望:

(5)
进一步地,如图2所示的单向车道中,当第i辆车存在感知盲区时,若有其他车辆处在第i辆车周围,则共享其传感器数据可对盲区Ai实现补充,定义第j辆车对第i辆车的盲区补充范围为Sij,即第j辆车感知范围与盲区Ai的交叉范围,如图2中点线框所示。应考虑到,第j辆车同样可能会受到第j+1辆车遮挡。

图2 盲区补充面积示意图


(6)
2 基于熵权法的传感器共享节点选择策略
建立了感知盲区模型,即可研究面向盲区补充的传感器共享节点选择策略。图3为传感器共享场景示意图,车辆行驶在含有其他车辆的交通流场景中,为保证安全,当前车辆需感知到前方安全距离内交通参与者的实时动态,安全距离大小与当前车辆速度正相关[14]。因前车遮挡导致产生感知盲区(图3阴影部分),导致当前车辆无法完全感知到安全距离内的交通情况,此时可以共享周围车辆的传感器数据以对当前车辆感知盲区进行补充。从周围车辆中选择出共享收益最高的车辆节点发起传感器共享,可以扩大当前车辆的感知范围,弥补感知盲区,同时提高感知鲁棒性。

图3 传感器共享场景
共享周围车辆传感器数据对当前车辆带来的收益程度受多种因素影响,包括周围车辆位置、传感器感知范围等,需量化各影响因素并寻找合适的评分模型进行对比。由于熵权法的评价结果主要依据客观因素,几乎不受主观因素的影响,避免了人为因素的干扰,可用于任何需要确定权重的过程。因此,在与周围车辆进行传感器共享达到的收益效果完全不同时,可使用熵权法客观地确定各影响因素的权重,得到最能体现周围车辆差异程度的评分,据此选择出合适的共享节点。图4为策略流程图。
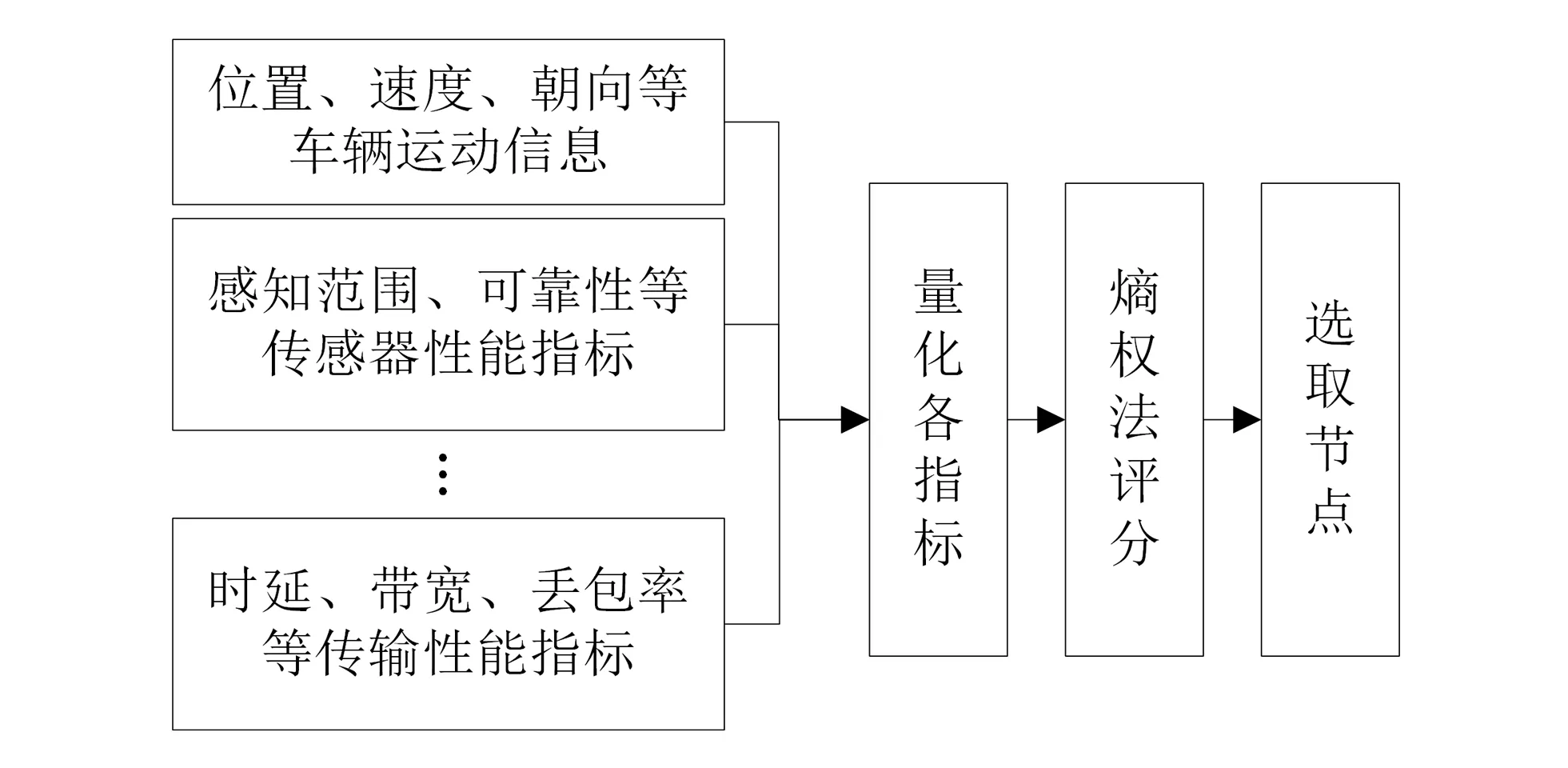
图4 策略流程
策略步骤为:
1)当前车辆通过自身传感模块读取自身传感器数据,通过车联网模块收集周围车辆的传感器数据,其中自身传感器数据包括自身全球定位信息和航向、遮挡物的边界坐标信息,周围车辆的传感器数据包括周围车辆定位信息、传感器性能和传输性能等指标;
2)量化图5所示的周围车辆对当前车辆感知盲区补充范围数值;
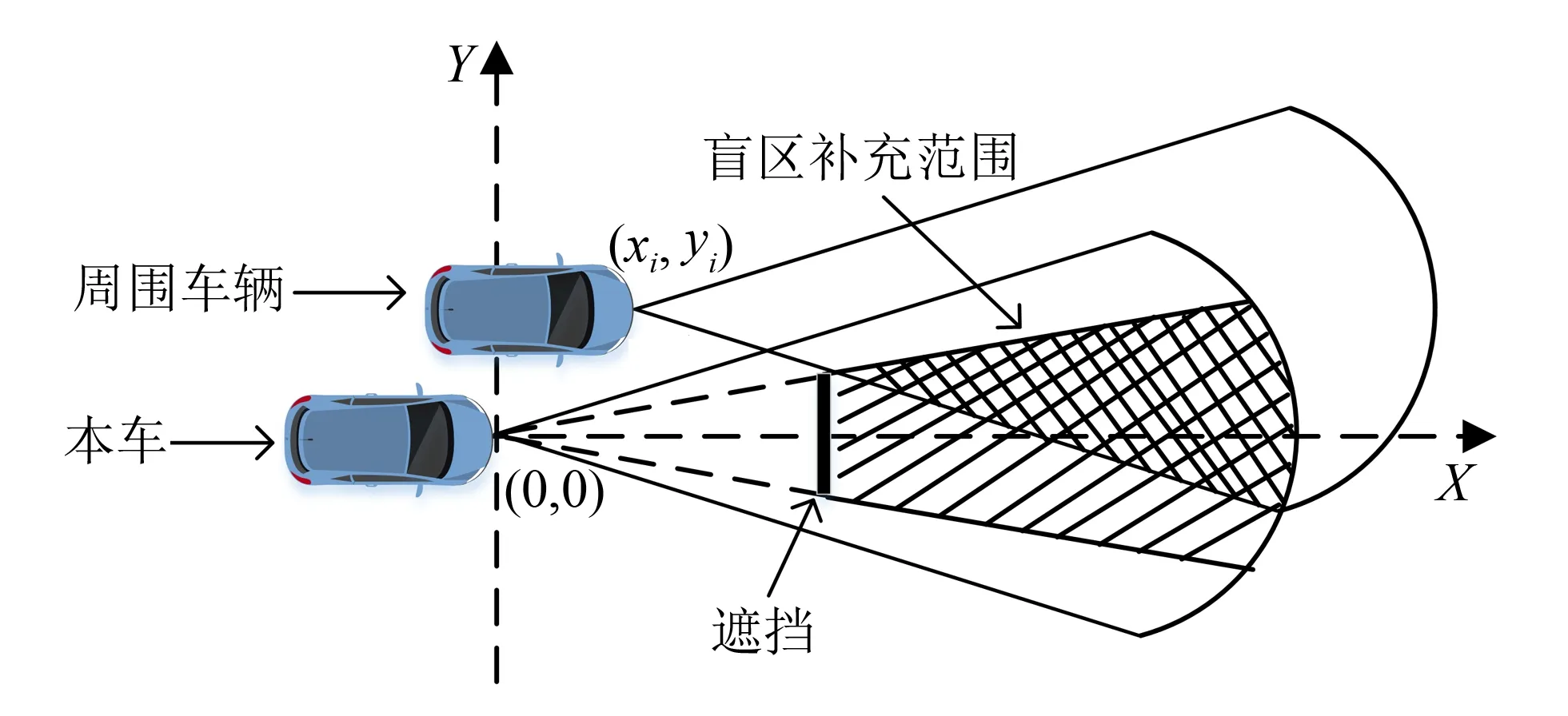
图5 盲区补充范围示意图
3)采用熵权法计算感知盲区补充面积、传感器性能和传输性能等指标所占权重,得出周围车辆最终评分;
4)选择评分最高的车辆节点作为共享目标。
3 验证与分析
3.1 动态交通流感知盲区模型验证
首先生成大量服从指数分布的车辆间距随机数,由连续生成的车辆间距随机数可唯一确定各车位置,然后,基于此位置计算各车的感知盲区面积的统计均值,最后,与感知盲区模型的数学期望进行对比,验证该模型的有效性。中国一级道路设计车速为120 km/h,机动车道宽度为3.75 m[15],根据文献[14]中的安全距离模型进行换算后,将验证默认参数设置为道路宽度4 m、安全距离50 m和车辆密度0.03辆/m。由图6、7可见,在不同的车辆密度与不同的安全距离下,实际盲区面积统计均值与模型中盲区面积期望值之间的误差低于0.05 m2,因此,模型对车辆间距和感知盲区面积进行了良好表征。

图6 不同车辆密度下盲区面积统计均值与期望
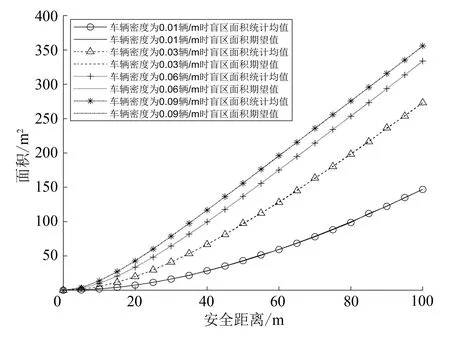
图7 不同安全距离下盲区面积统计均值与期望
3.2 节点选择策略性能验证
采用蒙特卡洛数值模拟方法对该策略进行验证,验证流程如图8所示。具体步骤为:
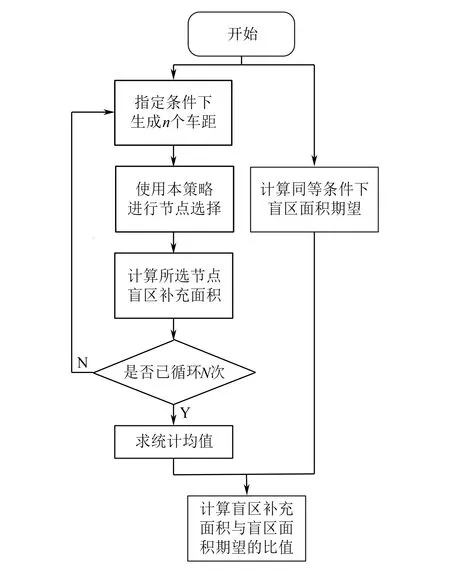
图8 策略验证流程
1)生成服从指数分布的n个车距,通过盲区补充面积量化求出各车辆对应其余n-1辆车的各个盲区补充面积,将其作为熵权法的输入数据;
2)通过熵权法计算出各车的评分,评分最高者即为最合适的节点;
3)将各车从所选节点处能获得的盲区补充面积计入累加和,循环N次后取平均值,即可求出所选节点盲区补充面积的统计均值;
4)将该统计均值与计算得出的盲区面积期望进行对比,可得当前车辆与本策略选出的节点共享能得到的盲区补充比例,盲区补充比例越高说明策略性能越好。
如图9所示,WR=4 m,dsafe=50 m时,实线为对应不同车辆密度的感知盲区面积理论期望值,虚线为对应不同车辆密度下当前车辆与该策略选择节点共享能收益的盲区补充面积。图10为对应图9在不同车辆密度下的盲区补充比例。从图10可看出,随着车辆密度增大,盲区补充比例逐渐下降,这是因为车辆密度增大时,所选节点受到遮挡的概率同样增大,导致节点感知范围变小,最终影响了盲区补充比例。但在车辆密度λ≤0.03辆/m时,该策略选出的节点可以实现大于70%的盲区补充,在车辆密度λ≤0.09辆/m时,该策略选出的节点依旧可以保持大于50%的盲区补充。

图9 不同车辆密度下的盲区补充面积
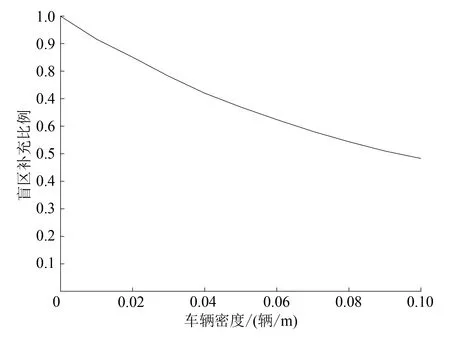
图10 不同车辆密度下的盲区补充比例
如图11所示,WR=4 m,λ=0.03辆/m时,实线为对应不同安全距离的感知盲区面积理论期望,虚线为对应不同的安全距离下当前车辆与该策略选择节点共享收益的盲区补充面积统计均值。图12为对应图11在不同安全距离下收益的盲区补充统计均值与感知盲区面积理论期望的比值。从图12 可看出,在固定车辆密度时,本策略选出的节点可以实现的盲区补充逐步减少,这是因为当车辆密度固定,安全距离较低时,周围车辆出现在感知盲区范围内的概率较小,此时所选节点为遮挡车辆的概率较大且无其他车辆对遮挡车辆造成遮挡,与遮挡车辆共享可达到较大的盲区补充比例,在dsafe<70 m时,本策略所选节点能实现70%以上盲区补充。随着安全距离的增大,而车辆密度不变时,安全距离内的车辆增多,所选节点受遮挡的概率增大,导致盲区补充面积统计均值较低,但在dsafe<100 m时,本策略所选节点依旧能实现50%以上盲区补充。

图11 不同安全距离下的盲区补充面积
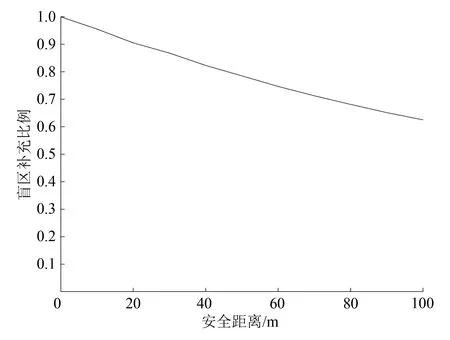
图12 不同安全距离下的盲区补充比例
4 结束语
构建了一个动态交通流感知盲区理论模型,分析了感知盲区面积与车辆密度和安全距离之间的映射关系,提出了一种基于熵权法的传感器共享节点选择策略,该策略主要参考了盲区补充面积保证共享收益。验证了盲区模型对实际交通场景的良好表征,基于此模型验证了节点选择策略的有效性。在车辆密度小于0.09辆/m或安全距离小于100 m时,该策略可以实现50%以上的盲区补充;在车辆密度小于0.03辆/m或安全距离小于70 m时,该策略可以实现70%以上的盲区补充。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
东南大学学报(自然科学版)(2022年3期)2022-06-19
文萃报·周二版(2019年8期)2019-09-10
小雪花·初中高分作文(2019年2期)2019-06-27
为了孩子(3~7岁)(2016年5期)2016-05-14
中学生数理化·八年级物理人教版(2015年12期)2016-01-25
中学生数理化·八年级物理人教版(2015年12期)2016-01-25
中学生数理化·八年级物理人教版(2015年12期)2016-01-25
现代电子技术(2009年15期)2009-09-30