
大型钢结构巡检爬壁机器人永磁轮优化设计
2022-02-11 11:46刘俊锋洪晓玮聂宇成
制造业自动化 2022年1期
刘俊锋,洪晓玮,陈 勇,聂宇成
(南京林业大学 机械电子工程学院,南京 210037)
0 引言
大型钢结构长期处在恶劣自然条件下,表面的保护漆会老化、剥落,从而导致其腐蚀生锈。其次,像港口起重机等机械设备作业过程始终处于交变载荷之中,容易发生疲劳失效和断裂等问题。目前主要依靠人工对大型钢结构进行缺陷检测,不仅劳动强度大,而且危险系数极高。因此,国内外开展了大量研究[1~4],希望爬壁机器人能够代替人工对大型钢结构进行巡检作业。
爬壁机器人按照吸附方式可分为负压吸附、电磁吸附和永磁吸附;按照移动方式可分为足式、履带式和轮式。永磁轮式爬壁机器人能够满足大型钢结构巡检可靠吸附和灵活运动的需要,但产生较大的吸附力会要求增大永磁轮质量,从而增加了驱动系统的负载。所以,对永磁轮进行优化设计,提高单位质量吸附力即吸附效率,是爬壁机器人研制的重点之一。潘泊松等人[5]通过多岛遗传算法对基于Halbach阵列永磁轮的结构参数进行了优化,提高了磁能利用率。Howlader等人[6]重点分析永磁吸附装置中轭铁厚度和个数对吸附力的影响,确定了最佳结构方案。袁硕等人[7]对Halbach阵列中永磁体采用水平和垂直结合充磁来减少结构漏磁。陈彦臻等人[8]改进传统永磁轮磁路,提高了吸附力。
上述研究大多停留在模型仿真阶段,并且对永磁轮吸附在曲面时缺少相关分析。本文针对大型钢结构巡检需要,研制一种适应在曲面爬行的永磁轮式爬壁机器人,利用COMSOL软件优化永磁轮结构参数,并证明机器人具有在大型曲面钢结构上可靠吸附的能力。
1 爬壁机器人整体结构设计
本文设计的爬壁机器人三维结构如图1所示。机器人由前段和后段组成,前后两段各安装有一个永磁轮和伺服电机,实现在钢结构壁面上的吸附和爬行;安装在前段上的步进电机为机器人转向提供动力。前后两段由铰链连接,可以相对偏转一定角度,使得爬壁机器人能够在曲面上爬行。
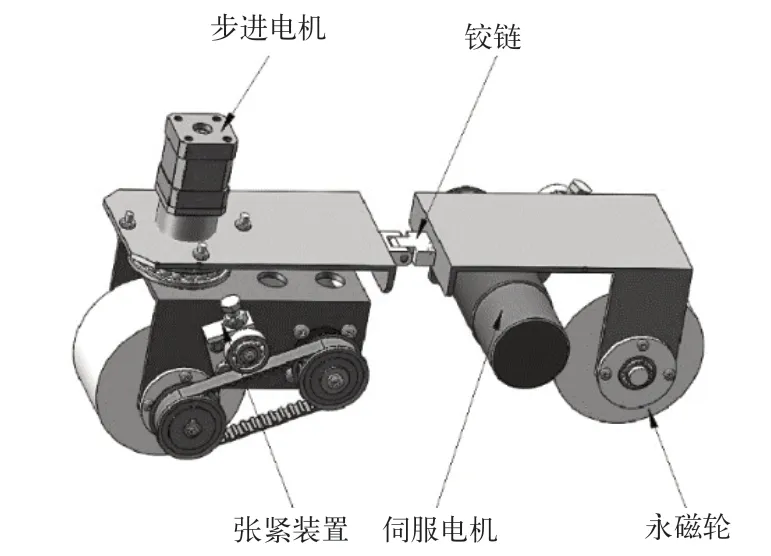
图1 爬壁机器人三维图
1.1 永磁轮结构设计
如图2所示,永磁轮整体是对称的,由轭铁、永磁体、隔磁件组成。永磁体选用剩余磁感应强度高,矫顽力大的稀土材料钕铁硼。两边轭铁选用工业纯铁,其饱和磁感应强度高,加工性能好,它可以引导磁通集中在永磁轮与钢结构壁面接触区域。隔磁件采用铜隔开相邻磁路的磁感线分布,提高磁场利用率。为防止永磁体与钢结构壁面间产生碰撞、磨损,设计轭铁外径比永磁体外径大2mm~3mm,起到保护作用。
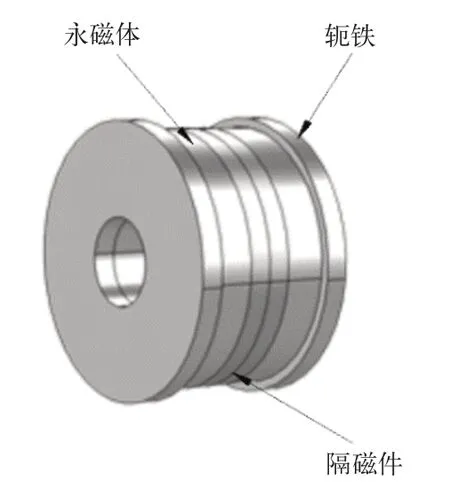
图2 永磁轮三维图
2 爬壁机器人可靠吸附条件研究
爬壁机器人主要有三种失稳形式:沿工作壁面滑移、纵向倾覆和横向倾覆[9]。许多大型钢结构壁面与竖直面存在夹角β,取值范围为[-90°,90°],如图3所示。当β∈[0,90°]时机器人更有可能发生失稳。为求得可靠吸附时的吸附力,本文仅对吸附在[0,90°]壁面上的机器人进行力学分析。

图3 机器人纵向吸附力学分析图
2.1 沿工作壁面滑移
图3为爬壁机器人在壁面上纵向吸附的力学分析,若避免发生滑移,则受力条件为:

式中:Fa为永磁轮吸附力,G为机器人重力,N1为壁面对永磁轮1的支持力,N2为壁面对永磁轮2的支持力,Ff1为永磁轮1受到的静摩擦力,Ff2为永磁轮2受到的静摩擦力,μ为永磁轮与壁面间静摩擦系数。
且Ff1≤μN1,Ff2≤μN2可得:

2.2 纵向倾覆
由图3可得机器人在壁面上不纵向倾覆(不绕永磁轮1的吸附点翻转)的条件为:

式中:l1为机器人重心与永磁轮1中心在Y方向上的距离,l2为两个永磁轮中心在Y方向上的距离,h为机器人重心到壁面的距离。
且N2≥0,可得:

2.3 横向倾覆
图4为爬壁机器人横向吸附的力学分析,则不发生横向倾覆的条件为:
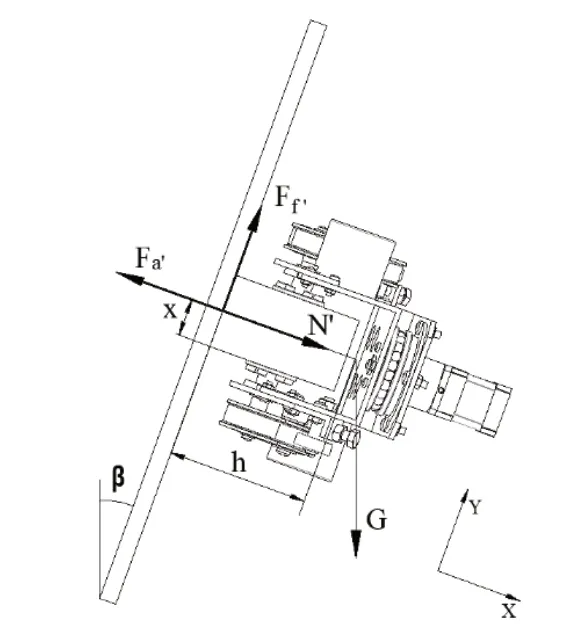
图4 机器人横向吸附力学分析图

式中:Fa'=2Fa为永磁轮的总吸附力,N'=N1+N2为壁面对永磁轮的总支持力,Ff'为壁面对永磁轮的总静摩擦力,x为机器人重心到永磁轮下边缘沿Y方向上的距离。
且Ff'≤μN',可得:

2.4 吸附力极值计算
综上可知,永磁轮吸附力必须满足:

根据设计参数:G=98N,μ=0.4,l1=140mm,l2=235mm,h=80mm,x=22mm。代入式(9)可得:Fa≥304.65N。
所以,当单个永磁轮提供的吸附力Fa≥304.65N,机器人能在钢结构壁面上可靠吸附。
3 永磁轮有限元建模仿真及优化设计
3.1 静态磁场 理论模型的求解
爬壁机器人永磁轮的磁场为静态磁场,其分布符合Maxwell 电磁理论。为了简化磁场求解,引入矢量磁位A:

式中:B为磁感应强度。
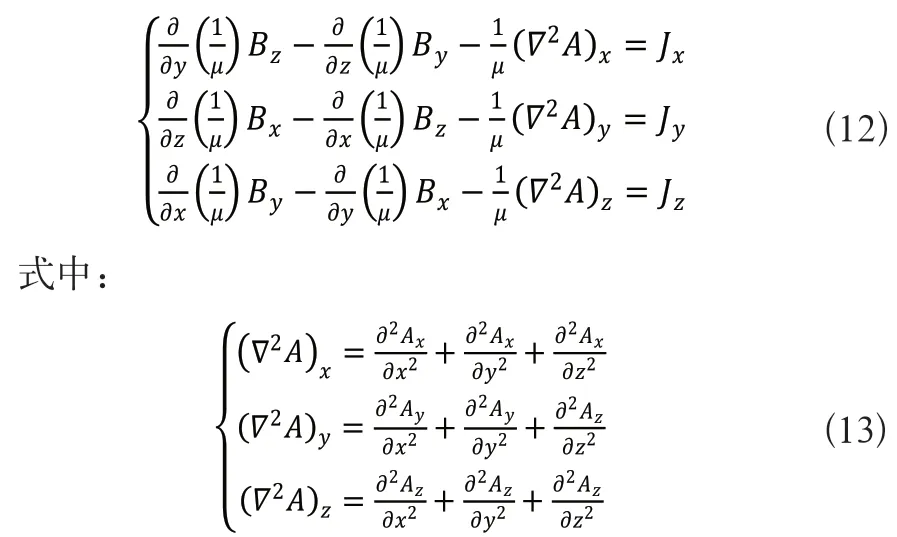
由于永磁体、轭铁、隔磁件及空气介质都为各向同性材料[10],根据Maxwell方程组、介质本构关系和库伦规范,可推导出:

式中:μ为介质磁导率,J为传导电流密度。
结合式(10),将式(11)在坐标系中展开得:
吸附力也是磁场分析的重要指标,可用Maxwell张力法来计算永磁轮与钢结构壁面间的吸附力:

式中:S为包围磁场中介质的闭合面,n为ds外法线方向的单位矢量,B为闭合面上磁感应强度,u为空气的磁导率。
上述静磁场模型是进行有限元仿真的根本依据,由式(14)可知,利用COMSOL Multiphysics软件对吸附力进行求解时,必须将永磁轮模型封闭在空气中。
3.2 永磁轮的磁场仿真与分析
永磁体材料为N40钕铁硼,两个磁环采用轴向充磁,并反向布置。考虑到永磁轮整体尺寸,初始设定永磁轮内径d=29mm,外径D=70mm,永磁体宽度t1=10mm,隔磁宽度t2=6mm,轭铁宽度t3=7mm,总宽度T=46mm,壁面厚度t=10mm,其结构参数示意如图5所示。由于钢结构表面有油漆和锈蚀,且永磁轮外包裹尼龙保护套,上述非导磁物质使得永磁轮与壁面不直接接触,因此取气隙L=5mm。
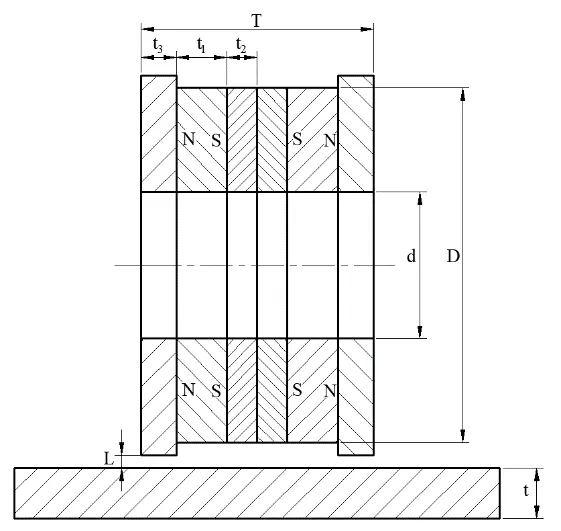
图5 永磁轮结构参数示意图
在COMSOL软件中构建永磁轮的三维有限元模型并进行仿真计算,多切面磁通密度模如图6所示。
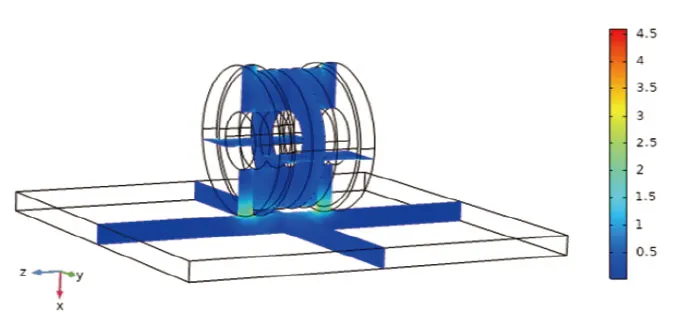
图6 多切面磁通密度模
从图6可以看出磁通密度最大处分布在两侧轭铁与壁面间气隙处,表明永磁轮吸附在壁面上时能产生较大吸附力。中间隔磁件处磁通密度较小,隔磁件发挥了一定作用。这些都符合磁路设计的原则和实用目的。
在全局计算中求解电磁力的x轴负方向分量,即永磁轮对壁面的吸附力为308.95N,大于304.65N,证明了其结构的合理性。
3.3 永磁轮的结构参数优化
永磁轮优化设计的准则是最大限度提高磁能利用率。因此在机器人可靠吸附的前提下,提出优化目标:使吸附力与永磁轮自身质量的比值尽量大,提高永磁轮的吸附效率:

式中:Fa为吸附力,ma为永磁轮质量;受爬壁机器人总体尺寸和安装空间限制,永磁轮内径d=29mm和外径D=70mm已经确定。
本文通过控制变量的方法,利用COMSOL软件选择参数化扫描并计算单变量对永磁轮吸附力和吸附效率的影响,设置参数取值1mm~20mm,等间隔取1mm。
如图7所示,永磁体宽度增加会使吸附力和吸附效率单调增加。磁路的磁感线主要通过轭铁,透过气隙进入壁面。t1增加,气隙内磁通密度增大且未饱和,所以吸附力上升。吸附力增幅大于永磁轮质量的增幅,可知适当增加永磁体宽度可达到提高吸附效率的目的。综合考虑,受机器人尺寸约束,t1在满足可靠吸附的情况下取值为11mm,使永磁轮整体宽度在45mm以内。
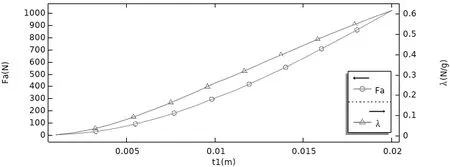
图7 永磁体宽度对吸附力和吸附效率的影响
如图8所示,隔磁宽度增加,吸附力也逐渐增加。因为t2增大,磁路中磁阻增大,迫使更多磁通经过轭铁增大气隙内磁通密度。t2在1mm~10mm范围内,吸附效率增加,且6mm之后上升缓慢。但隔磁继续增宽导致永磁轮质量增幅更大,降低了吸附效率。考虑到永磁轮尺寸,t2取值不变。
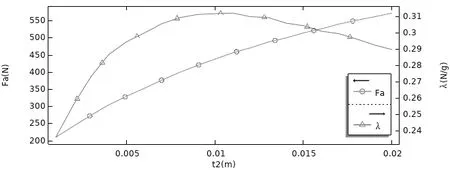
图8 隔磁宽度对吸附力和吸附效率的影响
如图9所示,当t3大于5mm时,吸附力增加缓慢后逐渐减小。因为轭铁宽度增加,磁路中漏磁减少而磁通密度增大,但轭铁内磁通逐渐饱和,使吸附力增加趋于平稳。t3继续增大后,构成回路的磁感线减少,导致吸附力下降。在满足可靠吸附的条件下,t3取值为5mm,此时轭铁的利用率最高,吸附效率也近似最大。
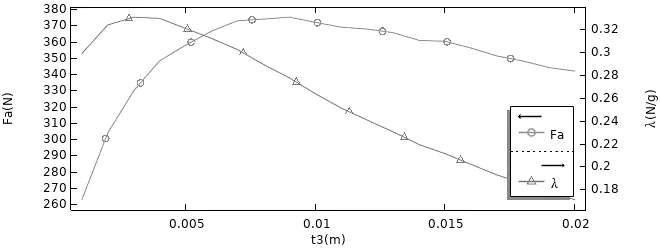
图9 轭铁宽度对吸附力和吸附效率的影响
结合上述分析,确定了永磁轮的结构参数。优化前后对比如表1所示,优化后永磁轮整体质量有所减小,吸附力大幅度增加。吸附效率从0.248N/g到0.308N/g,提高了24.2%。不仅增加了爬壁机器人吸附可靠性,也为在曲面钢结构上作业时需要的吸附力留有余量。
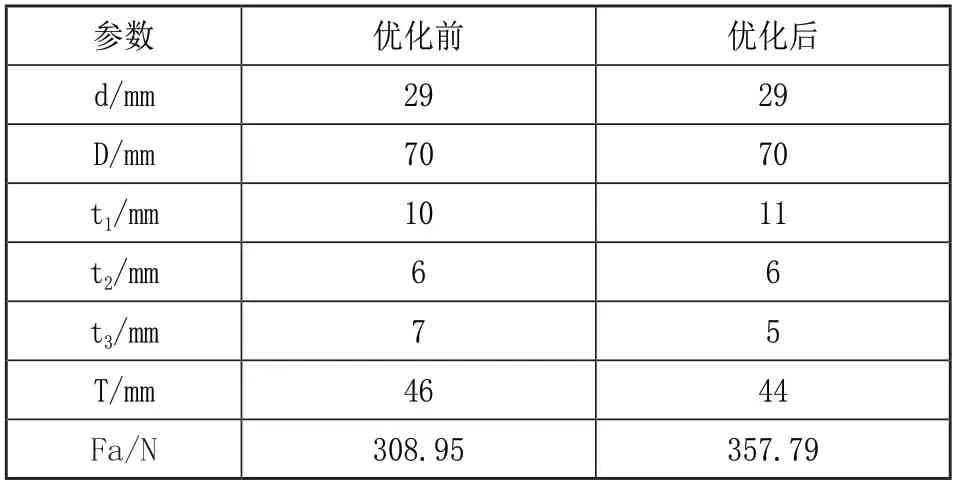
表1 永磁轮优化前后对比
3.4 永磁轮曲面吸附分析
永磁轮吸附在平面钢结构时与壁面是线接触,由于曲率的存在,永磁轮吸附在曲面时接触面更小,对吸附力有更高的要求。当爬壁机器人以不同姿态在曲面钢结构上爬行时,难以确定极值,但能肯定机器人在球面上的吸附状态是最严峻的。因此利用COMSOL软件建立优化后永磁轮和球面的三维有限元模型,研究了球面半径对吸附力的影响。如图10所示,随着球面半径增加即曲率的减小,永磁轮吸附力逐渐增大。当球面半径为0.87m时,吸附力是306.93N,已达到机器人可靠吸附的条件,即机器人适应在曲率半径大于0.87m的大型钢结构上爬行。
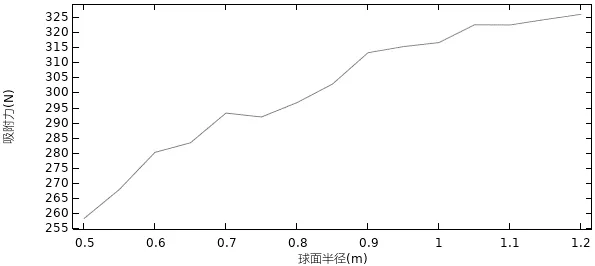
图10 球面半径对吸附力的影响
4 机器人样机实验
将研制好的爬壁机器人样机放在竖直钢板上进行测试,如图11所示,机器人静止时能够稳定吸附在壁面上,行进时能够以任意姿态在不同角度的壁面上灵活爬行。
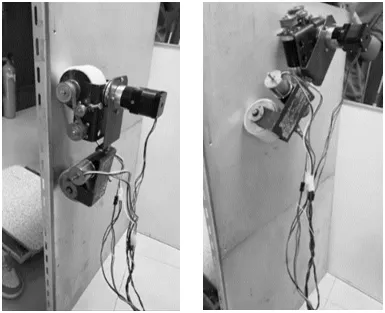
图11 爬壁机器人样机
实验结果表明:爬壁机器人吸附能力符合可靠吸附的要求,永磁轮能为爬壁机器人提供稳定的吸附力,验证了其优化设计的可行性和正确性。
5 结语
本文研制了一种可在曲面爬行的大型钢结构巡检爬壁机器人,重点开展永磁轮的磁场仿真,对其结构参数进行了优化。
1)对爬壁机器人三种失稳形式进行了静力学分析,得到永磁轮产生的吸附力应大于304.65N,为其优化设计提供理论目标。
2)利用COMSOL软件对永磁轮进行仿真分析,确定了结构参数。结果显示:优化后永磁轮吸附力为357.8N,吸附效率提高了24.2%,机器人能在曲率半径大于0.87m的钢结构上可靠吸附。
3)进行样机实验,验证了永磁轮能提供稳定可靠的吸附力,且爬壁机器人能够以任意姿态在不同角度壁面上灵活爬行。
猜你喜欢
大电机技术(2022年5期)2022-11-17
北京航空航天大学学报(2022年7期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
计算机仿真(2022年1期)2022-03-01
模具工业(2021年8期)2021-08-30
河北农机(2021年3期)2021-03-31
微特电机(2020年11期)2020-12-30
微电机(2020年9期)2020-12-04
弹箭与制导学报(2018年1期)2018-11-13
