Sentinel-3 OLCI数据的内陆湖泊有机悬浮物浓度遥感估算
2022-02-14 09:08仲苏珂吕恒杨子谦李杨杨许佳峰苗松
遥感学报 2022年1期
仲苏珂,吕恒,2,3,杨子谦,李杨杨,许佳峰,苗松
1.南京师范大学 虚拟地理环境教育部重点实验室,南京210023;
2.江苏省地理环境演化国家重点实验室培育建设点,南京210023;
3.江苏省地理信息资源开发与利用协同创新中心,南京210023
1 引 言
近年来,由于人类活动,中国内陆湖泊面临富营养化(Liu 等,2019;Jiang 等,2015),藻华频繁爆发。前人研究表明,悬浮泥沙是湖泊内颗粒态营养盐和污染物的重要载体,其中有机悬浮物OSM(Organic Suspended Matter)包括浮游植物、碎屑和细菌的有机成分(Piirsoo 等,2018;Boeuf等,2019;Liu 等,2019)。有机悬浮物分解后提供湖泊中90%以上的营养物质,是湖泊中重要的有机碳源(Hwang 等,1998),能表征湖泊富营养化程度和水体初级生产力。因此,研究湖泊OSM对于掌握水质变化、湖泊生物量和维护区域生态环境等具有重要意义。
目前利用遥感技术估算水体悬浮物浓度的研究较多,许多学者利用经验算法和半分析算法构建悬浮物浓度反演模型并进行应用,如马荣华和戴锦芳(2005)、Dekker 等(2001)利用经验模型估算总悬浮物浓度,经验模型输入包括单波段、多波段组合;孙德勇等(2009)利用高光谱实测数据进行敏感波段分析结合神经网络模型估测总悬浮物浓度,模型精度有了显著提高;施坤等(2011)针对内陆湖泊水体总悬浮物的光谱特征,建立了半分析反演模型,认为该算法反演总悬浮物浓度效果优于传统的经验算法。整体来看,水体总悬浮物浓度反演模型成熟且效果较好。但水体中有机悬浮物浓度的遥感估算研究相对较少,针对湖泊有机悬浮物的生物光学特征的研究也鲜有报道,目前水体有机悬浮物的研究集中在其来源组成(Cauwet和Mackenzie,1993;Wu等,2015)、迁移转化(Uher 等,2001;张乃星等,2006)以及入海通量(林晶等,2007)等。尽管Bowers 在研究中得到了有机悬浮物的吸收光谱,但因煅烧过程中无机悬浮物的形状和颜色极易发生改变,故通过相减法获取的有机悬浮物吸收光谱特征,必将产生较大的误差(Bowers 等,1996)。因此,迫切需要构建一种内陆水体中有机悬浮物估算的新方法,可以获取整个湖泊乃至整个区域的水体中有机悬浮物浓度时空分布特征。
哨兵3号卫星由ESA(欧洲航空局)研制并发射,其上携带的海洋和陆地颜色仪OLCI(Ocean Land Color Instrument)传感器,以MERIS 原有光谱特性为基础增加6个新的波段,在400—1020 nm波段范围内共设置21 个光谱通道,其中包含16 个水色波段,并具有高信噪比的优势;时间分辨率为1—2 d(武鼎 等,2019),与Landsat 相比卫星重访周期缩短,数据可选择范围扩大。虽然MODIS传感器能实现2次/d的高频监测,但其水色通道1 km 的空间分辨率对内陆水体监测过于粗糙,而OLCI 的空间分辨率为300 m,更能反映精细尺度下湖泊水质状况,成为内陆水体观测的重要数据源(苗松等,2018)。
本研究以太湖、巢湖、滆湖、小兴凯湖、滇池、洪泽湖、呼伦湖和南漪湖8 个湖区作为研究区,考虑到内陆湖泊复杂的光学特征,研究不同类型水体有机悬浮物浓度敏感的波段,构建适用于不同水体类型的有机悬浮物浓度估算模型,并以太湖和巢湖为例生成相应的有机悬浮物浓度分布示意图,分析有机悬浮物浓度的空间分布特征,为利用卫星影像数据估算中国内陆湖泊有机悬浮物浓度提供新的方法。
2 材料与方法
本文研究区域选取位于中国蒙新高原、东部平原和云贵高原湖区的8个典型湖泊,分别为呼伦湖、小兴凯湖、太湖、滆湖、巢湖、洪泽湖、南漪湖和滇池,各湖泊的水体类型、位置、面积、平均水深、以及采样点数见表1。研究区湖泊均为淡水湖泊,水深都小于6 m,湖泊面积差异较大,其空间分布如图1所示。

图1 有机悬浮物浓度实测值与估算值散点图Fig.1 The scatter plot of estimated OSM concentration and measured OSM concentration
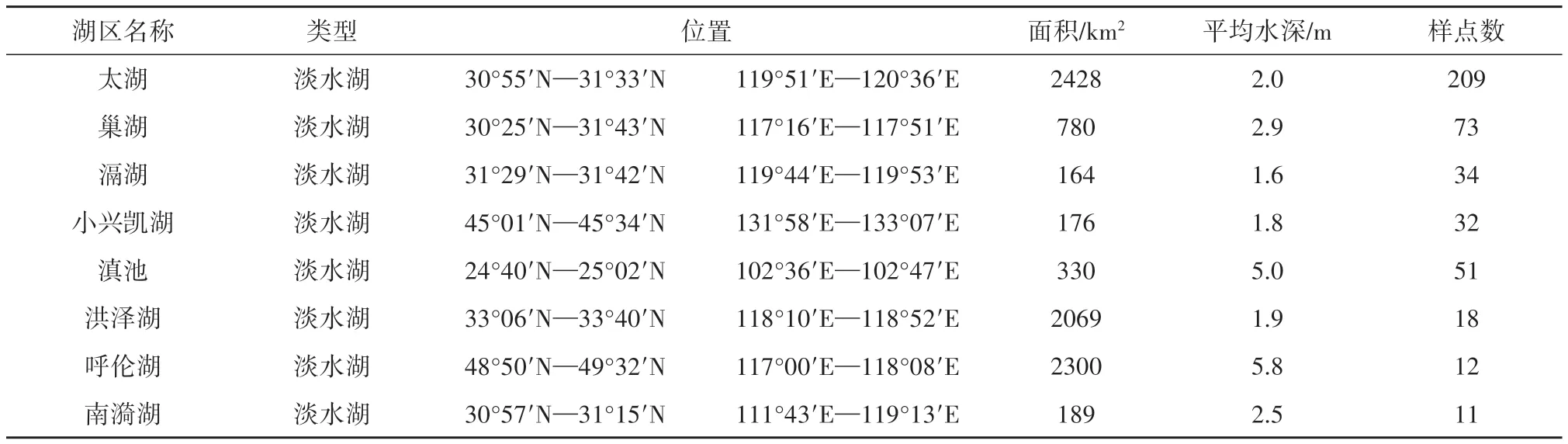
表1 研究区简介Table 1 Introduction to the study areas
2.1 实测数据集
本研究使用的数据包括太湖2013-08、2017-07、2018-05、2018-08、2019-12 和2020-08 6 期数据,巢湖2017-08、2019-07 和2020-11 3 期数据,滆湖2020-10 1 期数据,南漪湖2020-10 1 期数据,滇池2009-09、2017-11 2 期数据,洪泽湖2017-05 1 期数据,小兴凯湖2017-06 1 期数据和呼伦湖2020-09 1 期数据,共16 期数据统计440 个样点。野外采集水样并进行光谱测量,及时将水样低温冷藏送至实验室,测量总悬浮物浓度、无机悬浮物浓度、OSM 浓度、叶绿素浓度等水质参数。
水体光谱数据采用美国ASD 公司生产的ASD Field Spec Pro 便携式光谱辐射计,通过二类水体水表面以上光谱测量法,每个对象采集10 条光谱数据,剔除异常数据,对剩余光谱数据做均值处理,同时测定和记录相应的辅助数据如经纬度、风速、风向等(唐军武等,2004)。由光谱仪实测数据提取遥感反射率,具体公式如下:
计算离水辐亮度(Lw):

式中,Lw为水体辐亮度,Lsw为总的水体信息,r为气—水界面反射比,Lsky天空漫反射光。
水体表面入射总辐照Ed( 0+)度为

式中,Lp为标准灰板测量值;ρp为标准灰板的反射率。
遥感反射率R的计算公式为

在计算遥感反射率时,r为气—水界面对天空光的反射比取0.022,选用经过严格定标的30%的灰板,ρp取0.3,π 取3.1415926。
叶绿素浓度测量采用陈宇炜等提出的测定叶绿素a 的“热乙醇—分光光度计”进行测量(Le等,2009)。总悬浮物、有机、无机悬浮物浓度采用常规的干燥、烘烧、称重法(GB11901-89 标准)进行测定(Zhang等,2007)。
颗粒物后向散射系数是用美国Hobilabs 公司HS-6P测量,该后向散射仪是一款从6个独立通道来测量水体后向散射系数的自容式仪器。定标后,仪器光源在水中发射光束,接收探头首先测量光束在水中约140°的后向散射光,经过转换后得到总颗粒物后向散射,仪器光路长度引起的衰减效应可由仪器本身的SIGMA 矫正完成(顾艳镇等,2008)。
同时还测定了样品有机悬浮物三维荧光,首先利用颗粒物碱提取法对样品进行预处理。光谱的测定采用HORIBA 公司的Aqualog 三维荧光仪,设置激发波长(Ex)范围为240—450 nm,扫描间隔为5 nm,接收的发射波长(Em)范围是250—800 nm,间隔为0.5 nm,响应时间设置为7 s。此外,样品的分析中,以加入烘烤后的空白膜和同样体积的NaOH、HCl 溶液后的二次滤液作为空白样,通过扣除加酸中和过后的NaOH 三维荧光光谱矫正水的拉曼散射,利用高纯水的水拉曼进行荧光强度的标定,并用吸光度校正三维荧光光谱的内滤效应。Aqualog 系统会在测量完成后,自动扣除水拉曼和瑞利散射的影响,并采用Origin 9.0 软件生成对应的荧光峰分布图,最后借助Matlab 软件,使用DOMFluor 工具箱运行平行因子分析法(PARAFAC)模型对有机悬浮物的荧光光谱进行解析。
2.2 遥感数据及预处理
海洋和陆地颜色仪OLCI(Ocean and Land Color Instrument) 是搭 载 在Sentinel-3A 卫星上 的传感器,在中分辨率成像光谱仪(MERIS)传感器的基础上增加6个波段,从可见光到近红外光谱范围内设置21 个光谱通道,OLCI 波段设置如表2,经优化设计后,更能全面准确的反映复杂水体的光谱特征。本研究所使用的OLCI 影像是从欧空局(http://scihub.copernicus.eu[2021-04-30]) 下 载,利用SEADAS 7.4 软件进行图像预处理,包括几何校正,大气校正等,大气校正方法采用MUMM 模型。MUMM 算法(The Management Unit Mathematical Models)是针对二类水体的大气校正算法,在Gordon 标准大气校正的基础上,假设研究区域内765 nm 和865 nm 的气溶胶散射比和离水辐射率的比率为确定值和经过大气漫射透过率校正的765 nm和865 nm 处的水体反射率的比值为定值,求解辐射传输方程后再根据标准大气校正算法进行校正(Yan,2003)。前人的研究已经证明MUMM 方法可以成功的应用于中国内陆湖泊OLCI 影像大气校正,最大误差MAPE 不超过32%(吴志明等,2018;苗松等,2018)。影像处理完成后,使用太湖和巢湖矢量边界裁剪得到太湖和巢湖区域的影像,利用FAI指数结合目视解译确定水华区域,并对东太湖由水草覆盖的区域进行掩膜处理,水华区域和水草区域均不作为研究区域。
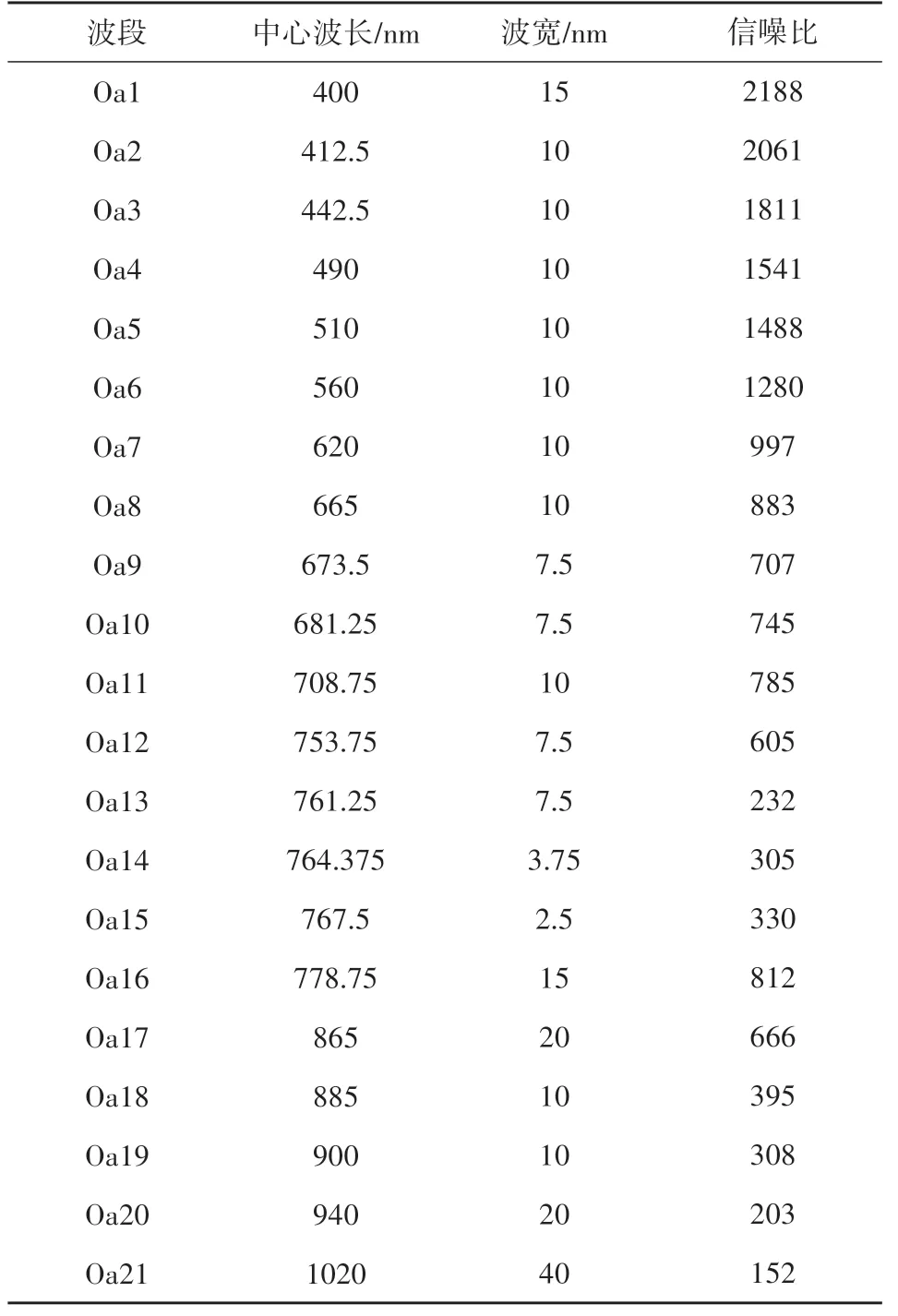
表2 OLCI波段设置Table 2 The band settings of OLCI
2.3 精度评价方法
为了评估模型在研究区内OSM 浓度反演的适用性,利用验证数据集进行回归分析,通过均方根误差(RMSE)和平均绝对百分误差(MAPE)的计算评价模型反演精度,其计算公式如下:

式中,yimea为OSM 浓度实测值,为OSM 浓度实测值的平均值,yimod为OSM 浓度的模型预测值,n为样本数。
3 结果与分析
3.1 面向OSM浓度遥感估算的水体分类方法
有机悬浮物是湖泊悬浮物的重要组成部分,同时存在于藻类颗粒物和非藻类颗粒物中,有机悬浮物来源、组成和变化极其复杂,不受单一因素的影响。因此,为有效反演OSM 浓度,本文先将实测遥感反射率模拟到OLCI 波段,后依据水体反射光谱峰—谷的变化,利用斜率算法将实验区内数据水体分为无机悬浮物占主导的水体(A 类)和有机悬浮物主导的水体(B类)。

光谱斜率公式如下:式中,λi和λj代表敏感波段的波长,Ri和Rj代表相应敏感波段的波长的反射率。
B6到B7光谱斜率S1:

B10到B11的光谱斜率S2:

式中,Rrs(bn)代表实测数据模拟到OLCI 第n波段的遥感反射率。
通过对S1,S2统计发现,S1,S2分别在0 和0.0005能很好区分A,B类水体,具体为

3.2 反演模型的构建
将数据集按照OSM 浓度从高到低排列,然后按2:1 的比例划分为训练数据集和独立验证数据集,为获得OSM 浓度的最佳反演因子,在训练数据集内对OSM 浓度敏感的波段及其波段组合进行回归估计,分别采用差值模型,比值模型和指数模型等建立回归方程。结果显示,波段组合B17/B3 可以用来估算A 类型水体的OSM 浓度的遥感估算因子,波段组合B10/B11可以用作B 类水体OSM浓度遥感估算因子。
A型水体的有机悬浮物浓度遥感估算模型为

B型水体的有机悬浮物浓度遥感估算模型为

3.3 精度评价分析
基于式(11)、式(12),利用3.2 中确定的独立验证数据(共146个)计算了分类后(分类标准见3.1 节) 有机悬浮物浓度估算模型的RMSE、MAPE,估算值与实测值散点图见图2。结果表明,分类后模型RMSE 为5.38 mg/L,MAPE 为28.93%,其中A 类水体大多数样点聚集在1:1 线周围,模型估算值接近实际值,RMSE 为2.92 mg/L,MAPE为33.78%;B 类水体散点也紧密分布在1:1 线附近,RMSE 为8.88 mg/L,MAPE 为17.10%,取得满意的估算精度。
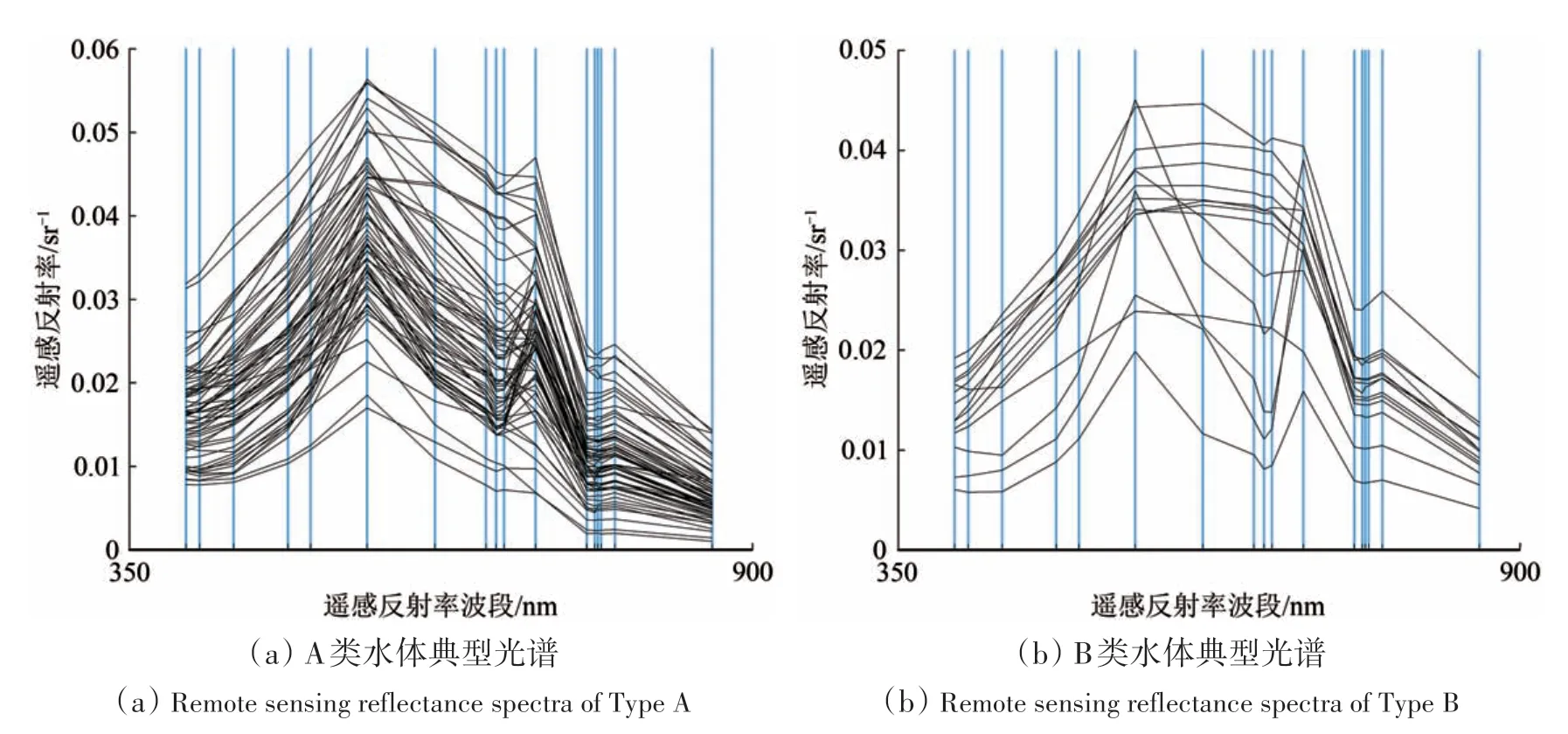
图2 不同类型水体遥感反射率光谱Fig.2 Remote sensing reflectance spectra of different water types
同时将本文提出的方法,与传统的未分类经验估算模型进行对比,利用多种波段组合进行回归估计,发现波段比值B17/B3 可以用来估算有机悬浮物浓度,其公式如下所示:

该模型的RMSE为16.48 mg/L,MAPE为70.59%,其实测值与散点值分布图如图2所示。在低浓度区间,散点聚集在1:1 线上方,模型估算值整体偏高;在高浓度区间,样点离散且显著偏离1:1线,水体OSM 浓度被明显高估或低估,并随浓度增大估算误差也逐渐增大,模型估算值不稳定,OSM浓度整体估算效果较差。本研究提出的先分类后估算的方法,估算精度有显著的提高,与传统的经验算法相比RMSE 降低了11.10 mg/L,MAPE 降低了41.66%。分类后模型RMSE 和MAPE 都有不同程度的下降,尤其是MAPE显著降低,模型估算的效果得到显著提升,特别是高浓度OSM 估算偏低现象明显改善。
有研究表明aph(674)与有机悬浮物浓度存在较强的线性关系,并提出半分析模型来估算有机悬浮物浓度:OSM=3.5×aph(674)+3.97(Liu等,2019)。利用3.2中确定的同样独立数据集(共146个)验证了Liu(2019)等提出的有机悬浮物浓度估算模型,得到的RMSE为14.57 mg/L,MAPE为54.77%,远均低于本文提出的模型估算精度。
为进一步探究反演算法在各个湖泊的反演精度,利用验证数据集分别对各个湖泊进行精度验证,结果表明巢湖RMSE为2.58 mg/L,MAPE为23.40%;太湖RMSE 为4.67 mg/L,MAPE 为34.20%;小兴凯湖RMSE 为7.89 mg/L,MAPE 为13.36%;滇池RMSE 为6.43 mg/L,MAPE 为20.21%。高原湖泊(小兴凯湖、滇池)和平原湖泊(巢湖、太湖)OSM浓度反演精度略有不同,但整体相差不大,这表明模型在不同湖泊适用性较好。
3.4 不同类型水体反射光谱特征
利用分类标准(3.1 节)对440 条光谱数据进行分类,两类水体模拟到OLCI前17个光谱通道的典型光谱曲线如图3。从图3 可以看出,B 类水体存在两种不同的光谱形态,第1 种类型在B6、B11存在明显的反射峰,反射率升高下降较快,色素颗粒物的吸收作用高于悬浮物的散射作用;第2种类型无显著波峰波谷,B6—B11 反射率整体抬高,B7 和B10 处的吸收特性基本消失,这主要是由于颗粒物的散射作用掩盖色素吸收信息,导致红光波段处的反射率整体抬升;A 类水体在B6 处反射峰比B类水体平缓,之后随波长增加反射率整体呈递减趋势,B11反射峰不明显。

图3 分类后不同类型水体平均光谱Fig.3 Mean of the remote sensing reflectance spectra of different water types after classification
分类后各类水体的平均光谱曲线和水质参数统计结果显示如图4 和表3。B 类Ⅰ型水体反射率波谱曲线波峰波谷明显,受叶绿素和胡萝卜素的弱吸收以及颗粒物的强散射作用影响在B5—B7 处出现第1 个反射峰,同时叶绿素在红光波段B10 的强烈吸收形成吸收谷,并在B11处浮游植物吸收系数达到最低形成第2个反射峰,该反射峰也是判断水体是否含有藻类的重要依据,两处反射率峰都很明显。由表可知,该类型水体叶绿素a浓度最高(平均值为146.78 μg/L),明显大于其他类型水体的平均值,最高可达469.47 μg/L,有机悬浮物在总悬浮物中所占比例较高(58%)。
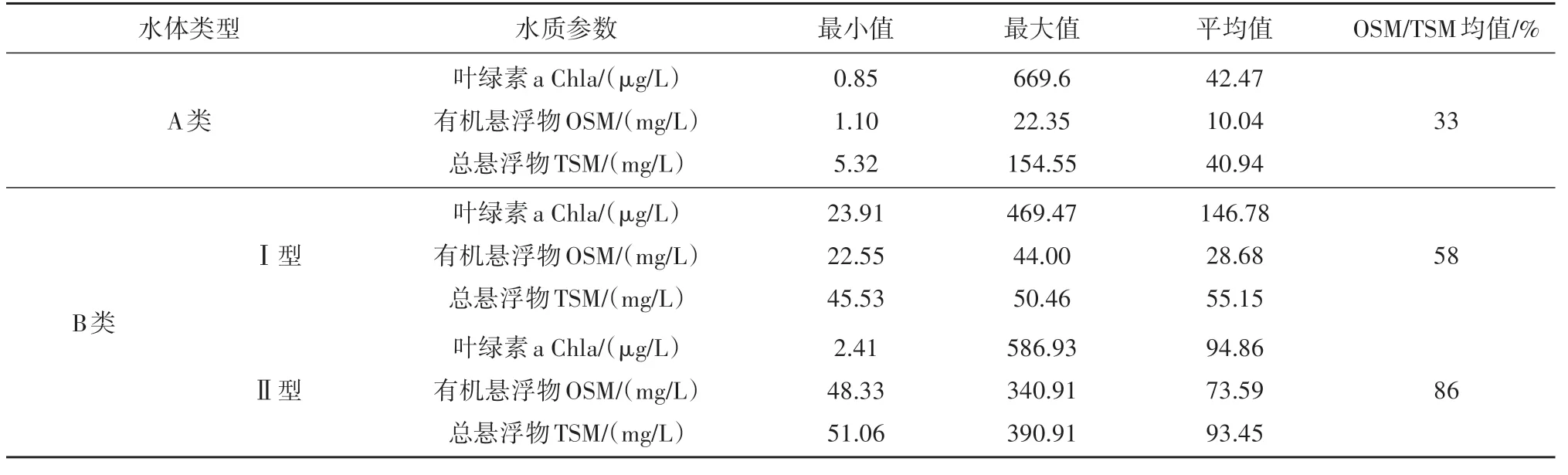
表3 两种水体类型的水质参数Table 3 Water quality parameters of two water types
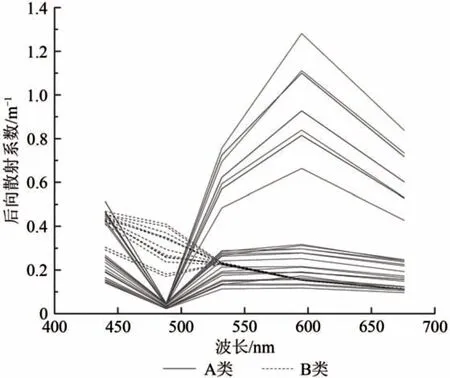
图4 不同类型水体后向散射系数Fig.4 Backscattering coefficient of different water types
B 类水体Ⅱ型反射率普遍偏高,由藻类色素引起反射峰并不明显,悬浮物的散射作用高于色素吸收作用,高浓度悬浮物使得水体后向散射增强,红光波段范围内反射率明显高于其他类型水体,B6—B11 处反射率整体抬高,反射峰不明显,同时掩盖B10 处浮游植物色素吸收特征,不同浓度的OSM 在B11 处反射率变化明显。由表2 可知,这种类型水体OSM 浓度在所有类型中最高,平均值高达73.59 mg/L,有机悬浮物在总悬浮物中所占比例也是最高(86%),叶绿素a 浓度稍低(平均值为94.86 μg/L),介于A 类水体和B 类水体Ⅰ型之间。
A 类水体含有少量的叶绿素a (平均值在42.47 μg/L),TSM 平均浓度最低(平均值在40.94 mg/L),OSM 所占比例也最低,仅为33%,低叶绿素a 和悬浮物浓度使得水体在B6 波段反射峰不明显,同时随着波段增加,水的吸收作用逐渐增强,反射率整体下降,在B10处无反射峰或反射峰不明显。由此可见,A,B 类水体主要区别在于水体颗粒物是否以有机悬浮物为主导,A类水体有机悬浮物所占比例小于50%,B类水体有机悬浮物所占比例大于50%。
3.5 水体的后向散射特性与有机悬浮物浓度的关系
本研究仅在部分野外实验时测量水体颗粒物后向散射系数,同时由于部分样点第6 通道数据有误,为保证数据的准确性,后向散射数据波段范围只包括前5 个通道数据,分别为440 nm,488 nm,532 nm,595 nm 和676 nm。为了研究水体中不同组分对后向散射系数的影响,将后向散射系数与总悬浮物、无机悬浮物浓度、有机悬浮物浓度及叶绿素含量进行相关性分析。结果表明,488 nm处的后向散射系数与有机悬浮物浓度和叶绿素a浓度呈正相关,且相关性最好(相关系数分别达到0.94 和0.95),595 nm 处的后向散射系数与无机悬浮物浓度的相关系数最大(0.68),受无机悬浮物浓度影响最大。
图5 显示A,B 类型水体典型后向散射系数光谱曲线。从图5中可以看出,不同类型水体后向散射曲线差异较大,随着波长向长波方向移动,A类水体后向散射系数波动较大,而B类水体整体呈递减趋势。由于采样点水体组分浓度的差异,使得后向散射系数大小不同,在488 nm 和595 nm 差异显著。

图5 水体类型和OSM浓度空间分布Fig.5 Spatial distribution of water types and OSM concentration in lakes
在488 nm 处,A 类水体后向散射系数bbp(440)最大值为0.04 m-1,最小值0.02 m-1,平均值0.03 m-1,而B 类水体最大值为0.41 m-1最小值0.16 m-1,平均值0.29 m-1,B 类水体样点后向散射系数普遍大于A类水体,这可能与B类水体颗粒物的组成特性和蓝光波段处的后向散射较强有关(孙德勇 等,2008);在595 nm 处,A 类水体后向散射系数范围为0.11—1.28 m-1,平均值为0.42 m-1,B 类水体后向散射系数基本在0.15 m-1附近。B 类水体后向散射系数偏小且小于A 类水体,这可能与B类水体含有较多藻颗粒,藻类颗粒物的后向散射特性不明显(Ulloa 等,1994),同时A 类水体悬浮物以无机悬浮物为主导,后向散射能力较强(孙德勇等,2007)。
3.6 不同类型水体有机物组成特征
本文以2020-08 太湖、2020-11 巢湖实验为例,利用三维荧光技术(EEMs)结合平行因子分析(PARAFAC)方法对样品中OSM 进行荧光组分分析,共得到4 种荧光组分C1—C4,参考前人研究表明(Stedmon,2003;Coble,1996;Coble 等,1998),组分C1为类色氨酸物质,对应类蛋白荧光T峰,主要反映生物(如微生物和浮游植物)降解来源形成的荧光峰值,也受到人类生活产生的污水和工业废水等影响;组分C2 反映来自于海洋的类腐殖质M 峰,这类氧化腐殖质受到水体微生物、藻类降解或人类活动的影响;组分C3 对应A 峰(紫外光区的类腐殖质荧光)和C 峰(可见光区类腐殖质荧光峰值),组分C4 对应A 峰,组分C3 和C4 通常被认为是受外源输入的腐殖质和富里酸形成的荧光峰值。OSM 荧光组分能指示OSM 的组成组分和来源,因此,荧光组分相对含量是OSM 的组分来源的重要指标。
对水体OSM 浓度和不同荧光组分的相对含量进行相关性分析,结果表明C1与C4具有显著相关性(相关系数为-0.81),这意味着类色氨酸组分C1 与可见光区类腐殖质组分C4 紧密联系。不同类型水体OSM 各荧光组分相对含量统计见表4,从表4 中可以看出,两类水体OSM 均由类蛋白物质和类腐殖质物质组成,但两类组成物质的贡献率却不尽相同,主要表现在C1、C4 组分的相对含量有较大的差异:B 类水体中的OSM 由C1 组分占主导,相对含量均值为(60.86±4.92)%,明显高于A类水体((48.97±7.13)%);与C2 和C3 组分相比,A、B 类水体在C4 组分相对含量差别也较明显,B类水体C4 组分相对含量均值为(18.66±2.14)%,低于A 类水体((24.86±6.4)%)。B 类水体OSM 类蛋白荧光所占比重明显高于A类水体,表明B类水体OSM 表现出较强的类蛋白荧光组分特征,又由于类蛋白组分往往指示内源输入,因此B 类水体OSM受自生源影响更加显著(江俊武等,2017)。

表4 两类水体OSM 4种荧光组分相对含量统计Table 4 Statistics of relative contents of four fluorescence components of OSM in two water types
3.7 基于OLCI 影像数据的太湖、巢湖OSM 浓度时空分布特征
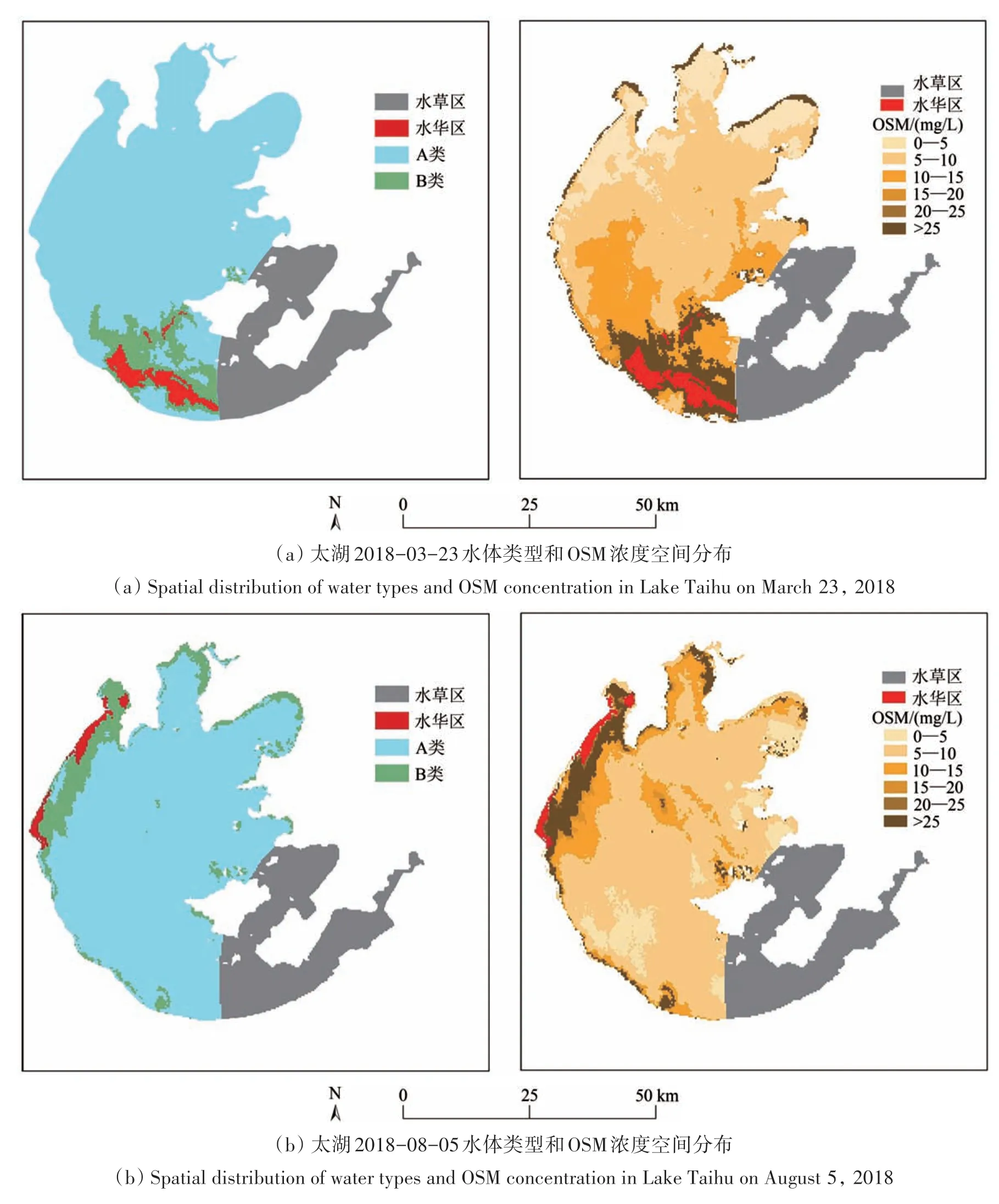
为确定模型在影像上的实际反演效果,检验模型应用的有效性,分别获取了2018-03-23 和2018-08-05 太湖的OLCI 影像,以及2017-09-18和2017-12-21 巢湖OLCI,在对影像进行预处理和水华掩膜之后,根据本研究提出的水体判别标准确定像元水体类型,然后依据像元类别不同选择对应的模型分别反演,进而获取太湖和巢湖OSM浓度不同时相的空间分布图,如图6所示。
2018-03太湖的水体类型分布图表明,太湖西南部水华爆发,OSM占主导的水体(B类水体)主要位于水华区以北,所占面积较小且分布集中,较为无机悬浮物占主导的水体(A类水体)分布在太湖北部,约占太湖面积的2/3,是太湖当天水体主要类型。2018-08 太湖的水体类型分布图表明,太湖当天两种类型水体均有分布。A类水体覆盖大部分湖泊,集中分布在太湖湖心区域;B类水体主要分布在水华区周围,除此之外,太湖东部的竺山湾、梅梁湾、贡湖湾岸边和西南部的长兜港也有分布B 类水体,这与同步野外采样数据中高OSM 浓度的测量值相吻合。2018-03 太湖OSM 浓度分布图显示,从整个湖区上看,太湖OSM 浓度呈现南高北低的分布特征,太湖西南部水华区附近OSM 浓度最高(OSM 浓度>25 mg/L),由南向北逐渐降低,至太湖北部OSM 浓度最低介于0—5 mg/L,而太湖岸边OSM 浓度较高,接近水华区附近OSM 浓度。对比分析后发现,即使是同一区域相同样点在不同季节水体类型也不完全相同,这说明在反演OSM 浓度时先分类后反演的必要性。2018-08 太湖OSM 浓度分布图显示,太湖OSM 浓度整体呈中间低四周高的分布特点,OSM 浓度大都介于0—10 mg/L,整体水平偏低且变化幅度小,高值区主要集中于水华附近和湖岸水体,并随着距离增大OSM 浓度逐渐降低,水华附近OSM 浓度在15—25 mg/L,也存在岸边OSM 浓度较高的现象。对比分析后发现,2018年两期太湖OSM 浓度的空间分布特征不同,3月份太湖OSM浓度高值区主要位于太湖南部长兜港附近,而8月份太湖OSM浓度在北部竺山湾附近较高,研究发现OSM 浓度高值区与水华爆发紧密联系,水华区附近水体通常是B 类水体,水体OSM 浓度较高,这可能是由于水华区聚集的藻类含有丰富的藻颗粒,水体有机悬浮物含量较高(Pacheco 等,2014;Zhang 等,2014)。同时湖岸边和湖内小岛附近OSM 浓度也较高,特别是在梅梁湾和长兜港处,除受自然条件如风速、湖流的影响之外,附近的度假区、居民区和工业区排放未处理污水和高强度人类活动可能造成近岸水体扰动,导致OSM 增多且不易沉积(赵丽娜等,2015)。
2017-09巢湖的水体类型分布图表明,巢湖当天水华严重,东巢湖和西巢湖中央及沿岸是水华的爆发区,水华周围分布着B类水体。除水华区域和OSM 占主导的水体(B 类水体)外,巢湖水体无机悬浮物占主导,A 类水体广泛分布。2017-12巢湖的水体类型分布图表明,巢湖当天并无水华,绝大部分湖区为较无机悬浮物占主导水体(A类水体),仅在湖岸西北部存在B 类水体,且B 类水体区域较小。2017-09 巢湖OSM 浓度分布图显示,巢湖OSM 在A 类水体总体浓度较低,主要集中在0—15 mg/L,并呈现中间低四周高的分布特点;水华区域邻近出现高浓度OSM(大于25 mg/L),这可能是水华区附近水体内藻颗粒较多导致的。从2017-12 巢湖有机悬浮物浓度反演结果可以看出,冬季巢湖有机悬浮物浓度与夏季相比整体较低,湖心区域为机悬浮物浓度低值区,OSM 浓度在5—10 mg/L,也呈现中间低四周高的分布特点,与夏季巢湖OSM 浓度分布特征相似。同时,在不同季节巢湖西部沿岸非水华区都存在高浓度的OSM,其浓度大都超过25 mg/L,这可能是由于巢湖西半湖临近市区,未经处理的生活污水和工业废水等主要通过十五里河、南淝河等流入巢湖,大量的有机废物进入该区域(李渊等,2013),水体富营养化程度加深,OSM 浓度较高,这也解释了西湖区水华时常爆发的现象。
4 结 论
本研究基于Sentinel-3A OLCI 影像波段特征,提出了一种适用于内陆湖泊有机悬浮物浓度的反演经验算法。本算法利用先分类再反演的策略,发现根据内陆水体的光谱特征,即可以通过OLCI的B6、B7 波段斜率和B10、B11 波段斜率,将水体分为以无机悬浮物占主导的水体和以有机悬浮物主导的水体两种类型,以无机悬浮物占主导的水体其OSM浓度可以利用OLCI的B3和B17波段来估算,而以有机悬浮物主导的水体则可以利用B10和B11 波段来估算。通过独立的验证数据集表明,该方法估算的RMSE为5.38 mg/L,MAPE为28.93%,与已有的内陆水体有机悬浮物浓度反演算法相比,估算精度有了显著的提升。此方法并被成功的应用于获取中国太湖和巢湖的有机悬浮物浓度的时空分布特征,表明本研究所构建的先分类后反演的有机悬浮物浓度估算方法为获取区域尺度的内陆水体有机悬浮物浓度提供了一个精度更高的新的算法。
本研究的分类方法和反演算法的构建,是建立在多个代表性湖泊实地采样的基础上,但算法的鲁棒性仍然需要进一步检验,特别是应用于与采样湖泊生物光学特征有较大差异的水体时,其算法的表现性能如何,还需要通过大量的野外实测数据来检验。在以后的研究中,通过收集更多湖泊的数据来进一步检验算法的性能。
猜你喜欢
散文诗世界(2021年1期)2021-02-04
恋爱婚姻家庭(2020年25期)2020-09-08
恋爱婚姻家庭(2020年9期)2020-09-07
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
学校教育研究(2018年8期)2018-07-09
地震研究(2017年3期)2017-11-06
现代营销·经营版(2016年3期)2016-05-14
吉林省教育学院学报(2015年10期)2016-03-04
光学仪器(2015年6期)2016-01-08