
星载双基地FMCW-SAR高分辨时域成像算法
2022-02-14 12:41杨天笑丁泽刚
信号处理 2022年1期
王 岩 杨天笑 丁泽刚 曾 涛
(1.北京理工大学信息与电子学院雷达技术研究所,北京 100081;2.北京理工大学重庆创新中心,重庆 401120)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)通过发射电磁波获取地物目标的散射信息,利用载荷运动实现观测孔径合成,实现对观测目标全天时、全天候高分辨成像。星载双基地调频连续波(Frequency Modulated Continuous Wave,FMCW)SAR结合了FMCW 技术和分布式SAR 技术的优势,灵活性高,成本更低[1-2]。例如,FMCW-SAR 占空比远大于脉冲体制雷达,在峰值发射功率相同时,可获取比脉冲体制SAR 更高的平均发射功率,大幅降低了对SAR发射机的要求[3-6],是低成本小卫星技术发展的趋势之一[7]。
双基地FMCW-SAR 具有回波信号空变强的特点,在星载构型尤为明显。目前,对双基地FMCWSAR 成像技术的探究多集中于空/地基平台,载荷运动速度通常为几米到几百米每秒[4,8-10],参数空变性不明显。相对之下,卫星平台的运动速度高达千米每秒量级,在高分辨成像条件下,若继续使用机载构型成像算法,将导致误差较大,图像质量差。例如,若在星载FMCW-SAR 条件下,使用面向机载FMCW-SAR 提出的后向散射(Back Projection,BP)算法,则会导致系统曲线定位不准确,成像散焦。
为此,本文提出了一种适用于星载双基地FMCW-SAR 的高分辨成像时域处理方法,分析了星载构型下距离脉冲压缩与载荷速度的相关性,提出了更精确的距离徙动曲线的定位方法,实现多普勒相位补偿后,可在传统BP 算法成像散焦失效的情况下,实现高精度成像聚焦。计算机仿真验证了所提方法的有效性。
本文的结构安排如下:第2 节介绍星载双基地FMCW-SAR 的回波模型,第3 节给出了适用于星载双基地FMCW-SAR 的成像处理算法,第4 节给出了计算机仿真验证,第5节对本文进行了总结。
2 星载双基地FMCW-SAR回波模型
2.1 回波几何模型
图1 给出了星载双基地FMCW-SAR 的立体几何模型,收发卫星平台采用目前应用较为广泛的前后跟随式构型,即发射平台和接收平台运行于同一轨道且保持相对固定的基线。其中灰色阴影区域代表目标成像测绘带,P点是测绘带的中心点目标,R0是点目标P到卫星轨道的最短斜距,τT0和τR0分别代表发射机T所在卫星和接收机R所在卫星的零方位时刻。RT(τ)和RR(τ)分别表示发射机和接收机在任意时刻τ到点目标的瞬时斜距,VT与VR分别为发射机和接收机的瞬时速度。
2.2 回波信号模型
与传统脉冲体制不同,FMCW-SAR 在信号传输过程中收发平台存在移位,将引入一个快时间走动项,在星载构型下产生的相位误差将不可忽略[11],因此在建立信号模型时需考虑其影响。经过传输时延τd后,接收机于τ+τd时刻接受到自地物目标反射回来的回波信号,将此时接收机与点目标的瞬时斜距表示为RR(τ+τd),用c表示光速,则传输时延可由式(1)求得:
假设观测场景中某地物目标点P的后向散射系数已知为σ,则经过传输延时τd后,接收机接收到P点的回波信号可以表示为:
其中fc表示发射信号的载波频率,Kr为线性调频信号的调频斜率,tr表示距离向快时间。
tr与任意时刻τ的关系为:
其中Tp为脉冲持续时间,n表示扫频周期数,方位慢时间ta=nTp。
与脉冲体制信号不同,FMCW 体制信号的理论占空比为1,即脉冲持续时间Tp与脉冲重复时间(Pulse Repetition Time,PRT)相等,通常为毫秒级。因此在对FMCW 体制信号进行脉冲压缩时,通常采用解线频调对不同延时处的信号进行处理,以降低接收机中频带宽,缓解对距离向采样率的需求并简化运算。解线频调接收通过构造一个传输时延已知且固定的参考信号,与接收到的回波信号进行共轭相乘得到差频信号,此时再对差频信号进行距离向傅里叶变化即可在频域得到回波的sinc 状窄脉冲,完成距离向脉冲压缩。
选取场景中心点生成参考时延,中心点对应最短斜距为Rc,则参考时延为:
由参考时延构造参考函数:
将回波信号与参考信号进行共轭相乘,得到dechirp处理后回波信号:
3 星载双基地FMCW-SAR时域成像处理
3.1 徙动峰值定位
在机载构型下平台运动速度较小,参考斜距通常为千米量级,因此即使传统的时域成像处理方法中认为传输时延τd是一个非距离空变的一维变量,忽略快时间对传输时延的调制效应,依旧对后续处理影响较小,徙动曲线的峰值错位可以忽略。但对星载FMCW-SAR 来说,平台运动速度大,参考斜距通常为几百千米,脉间调制效应会对距离徙动曲线峰值定位产生影响。若要在时域进行成像处理需要准确定位徙动曲线峰值的位置,传输时延τd不仅仅和慢时间相关,还需考虑快时间的影响。经过dechirp 处理后的回波信号在距离频域已被压缩为sinc 状的窄脉冲,若考虑一个扫频周期Tp内的回波信号,按照传统处理方法对式(6)中的信号做距离向傅里叶变换,可以得到dechirp处理后差频信号的频域表达:
此时信号的峰值点频率理论上应为:
在这样的处理方式下显然距离徙动曲线峰值定位与实际的峰值位置之间是存在偏差的,以1 m分辨率为例进行仿真,表1给出了仿真所用参数。
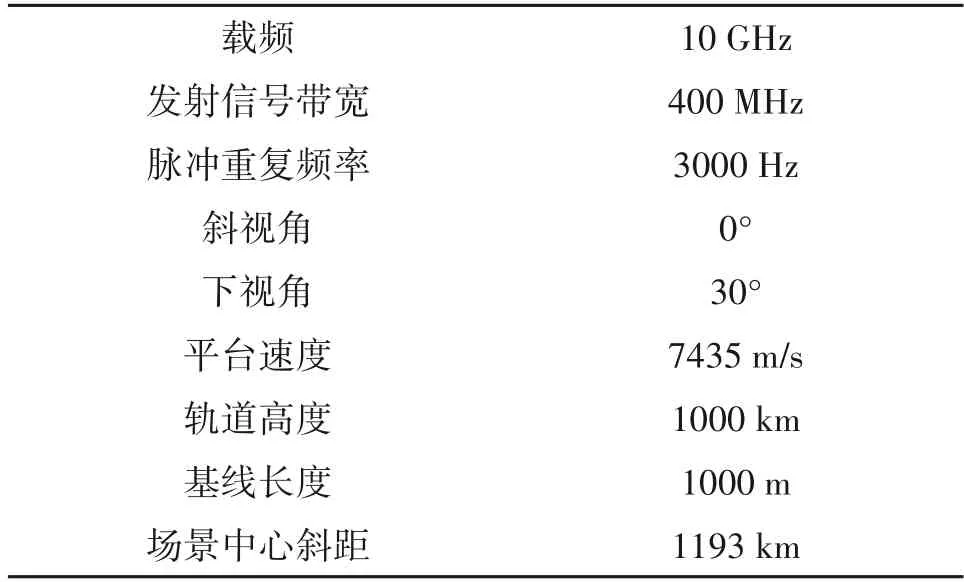
表1 仿真参数Tab.1 Simulation specifications
对信号进行距离维16 倍插值后将计算得到的理论峰值点位置与真实峰值点位置做差,得到传统处理方法的峰值误差如图2所示。
其中最大的峰值位置误差达到了0.65 m 的距离错位,对应38个距离门。显然这样的峰值点错位将导致后续进行后向投影时无法找到场景中各个网格点所对应正确位置的信号,进而影响成像。因此在星载构型1 m 分辨率情况下传输时延τd中的距离-方位耦合已然不可忽略,需重新考虑距离频域信号的理论峰值位置及后续处理方法。
首先对传输时延进行距离维的仿真分析,仿真结果如图3所示。
可以看出传输时延在距离维上主要呈现为线性形式。因此提出对传输时延进行距离维的线性近似,此时的传输延时可以表示为:
其中τdc,Kτ是仅随慢时间变化的中心传输时延和传输时延随快时间的变化率,可由τd对tr-τc进行一阶拟合求得。
此外还需考虑线性近似后残余的距离维传输时延高次项。经过仿真验证,在距离向采样间隔不变的情况下,当距离向采样时间扩展为原来的58倍时,由残余的距离时间高次项导致的峰值错位才达到了半个距离单元。
因此在实际仿真中可以忽略距离维传输时延高次项对峰值定位产生的影响。
再将式(9)代入式(6)中,不难得出此时解线调频后的信号表达为:
由式(10)可看出信号具有一致的时延,其产生相位对后续成像处理影响不大,因此可将(tr-τc)表示为tr以便后续推导。将滤除残余时频相位(Residual Video Phase,RVP)后的信号按tr的指数从低到高整理为:
发现此时引入了一个距离时间二次指数项,其中KrKτ不随距离向空变,且数量级较小,因此在后续处理过程中将其忽略。对忽略二次项后的信号进行距离向傅里叶变换,得到距离频域信号:
此时信号的理论峰值频率位置应表示为:
对信号进行距离维16倍插值后将计算得到的理论峰值点位置与真实峰值点位置做差,得到此时峰值误差如图5所示,其误差值在0和最高值之间跳变。
与图2 对比,可以看出此时的峰值点位置基本已不存在错位,验证了对传输时延进行距离维线性近似处理的有效性。
根据式(8)和式(13),传统处理方式徙动峰值位置误差为:
其中系数Kτ主要受斜距和速度的影响。为进一步说明改进的徙动峰值定位方法对星载构型系统的适用性,还需分析斜距和速度对传统处理方式徙动峰值位置误差的影响。
首先固定斜距为1000 km,按速度从100 m/s 到100000 m/s 变化生成Kτ;再固定速度为10000 m/s,按斜距从1 km 到1000 km 变化生成Kτ。仿真结果如图6所示。
从图6中可以看出,当固定参考斜距不变时,平台运动速度越大,传统处理方式下徙动峰值误差差越大;当固定平台运动速度不变时,参考斜距越小,不同处理方式下徙动峰值位置之差越大。星载构型情况下轨道高度通常为几百公里到一千公里,此时斜距对徙动峰值位置之差的影响较小,影响徙动峰值位置差的主要因素为平台的运动速度。如图6(c)中所示,选取机载构型的典型参数:平台速度为100 m/s,参考斜距为10 km,此时峰值位置误差约为-0.02 m,可以忽略;选取星载构型的典型参数:平台速度7000 m/s,参考斜距为800 km,此时峰值位置误差约为-1.27 m,显然不可忽略。星载构型下平台运动速度远大于机载构型,因此传统徙动峰值定位方式不再适用。
3.2 多普勒相位补偿
经过以上处理后的信号只需再进行多普勒相位补偿即可完成方位向脉压。通过对成像场景进行网格点划分获得网格点的坐标,再由卫星运行轨道坐标便能够计算得到每一网格点的传输时延,进而得到所对应的τdc和Kτ。利用式(13)获得每一网格点对应的信号峰值位置,再通过插值计算得到对应的回波值,此时需要进行多普勒相位补偿。补偿函数为:
将补偿后的回波值逐方位向点数进行相干累加,遍历每一网格点即可完成方位脉压。整体成像流程如图7所示。
4 仿真验证
本节根据图1 给出的星载双基地FMCW-SAR几何关系以及表1 给出的系统参数进行点阵成像仿真,观测带幅宽设置为5 km×5 km(方位×距离),理论分辨率为0.84 m×0.57 m(方位×距离),其中点目标以3×3 分布,PT5 为中心参考点目标,如图8所示。
根据传统成像算法和改进的成像算法处理后得到二维图像。为了更好地观察成像效果,对点目标的聚焦结果进行插值,得到各点的等值线和二维剖面图。图9 中(a)、(b)、(c)分别展示了传统算法处理场景近距点PT1、中心点PT5 和远距点PT9 的聚焦幅度等高线图,(d)、(e)、(f)分别展示了改进算法处理场景近距点PT1、中心点PT5 和远距点PT9的聚焦幅度等高线图。
此时传统算法的成像结果已经出现明显的散焦,9点的距离向分辨率约为0.90 m,方位向分辨率约为1.30 m,根据仿真参数此时地面距离向理论分辨率为0.57 m,方位向理论分辨率为0.84 m,因此传统算法已不适用于星载双基地FMCW-SAR成像。
对本文提出算法成像结果的剖面图进行测量分析,可以得到各个点目标的方位向和距离向聚焦质量指标如表2 所示,表中分别列出了9 点目标方位向和距离向的积分旁瓣比ISLR、峰值旁瓣比PSLR 和分辨率(3 dB 宽度)这三个指标的量化评估结果。
由表2 可知,上述9 点的距离向分辨率与方位向分辨率基本与理论值吻合。峰值旁瓣比PSLR 理论值为-13.26 dB,积分旁瓣比理论值为-9.6 dB,实际9 点的距离向PSLR 约为-13.26 dB,距离向ISLR约为-9.94 dB,方位向PSLR约为-13.26 dB,方位向ISLR 约为-9.94 dB,皆与理论值基本吻合,验证了成像算法的有效性。

表2 9点目标的方位向和距离向压缩性能指标Tab.2 The azimuth focused parameters for 9 point targets
5 结论
本文提出了适用于星载双基地FMCW-SAR 高分辨成像的时域成像方法,分析了解线频调后距离徙动曲线与载荷运动速度的相关性,提出了适用于高度平台的距离徙动曲线定位方法,经计算机仿真实验验证,本文所提算法处理精度较传统时域处理方法有显著提升。本文研究成果可对后续星载双基地FMCW-SAR 频域成像处理研究提供理论参考。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
西北工业大学学报(2022年1期)2022-04-22
幼儿园(2021年12期)2021-11-06
电脑知识与技术(2021年22期)2021-09-14
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2017年10期)2017-04-20
小学生时代·大嘴英语(2015年7期)2015-11-23
