基于梯度特征的弱小目标检测
2022-03-01 06:30陈忠碧
激光与红外 2022年1期
鲁 梅,陈忠碧
(1.中国科学院光电技术研究所,四川 成都 610209;2.中国科学院大学,北京 100049)
1 引 言
光学成像检测与跟踪系统由于隐蔽性好、抗干扰能力强等优势,在目标检测与跟踪任务中应用十分广泛[1]。通常将尺寸在1×1到9×9个像素之间的远距离目标称为弱小目标,对这类目标的准确检测可以大大增强系统性能。弱小目标检测的主要难点在于:目标在成像中所占面积小,缺乏纹理和形状特征;易受云层等复杂背景干扰;与周围背景对比度低,易被噪声淹没等[2-3]。
目前根据检测帧数可以将弱小目标检测分为单帧检测与多帧检测两大类。基于单帧检测通常假设背景在空间上具有相关性,占据图像低频部分,目标与背景不相关,占据图像高频部分[4]。Top-hat滤波[5]、最大均值/最大中值滤波[6]和各向异性差分[7]等传统的背景差分法结构简单、实时性好,但对复杂背景和噪声敏感;以局部对比度测度LCM[1](Local Contrast Measure)及其改进算法NLCM[8](Novel Local Contrast Measure)、ILCM[9](Improved Local Contrast Measure)等为代表的基于人类视觉系统的方法增强目标的同时可以抑制背景,但对低对比度场景检测效果不佳;稀疏低秩矩阵恢复的方法[10]近年来备受关注,对背景与目标的低秩稀疏假设使这类算法鲁棒性好,但易受高亮孤立噪声影响。多帧检测主要利用目标在时域的连续性,如粒子滤波算法[11]、基于高阶累积量[12]和联合时空域信息的方法[13]等,对低信噪比目标有比较好的效果,但是计算量大,依赖一定的先验知识,在实际应用中受到一定限制。
本文在现有的研究基础上,针对已有算法对低对比度、低信噪比场景检测率低的不足,结合实际工程需要,提出一种基于梯度特征提取的弱小目标检测方法。在红外与强光背景可见光图像序列上进行实验,证明本文所提算法对复杂背景与低对比度图像都有较好的检测效果。
2 图像结构分析
含弱小目标的图像由背景、目标和噪声三部分构成,即:
I(x,y)=IB(x,y)+IT(x,y)+IN(x,y)
(1)
其中,I(x,y)为原始图像;IB(x,y)、IT(x,y),IN(x,y)分别表示背景、目标和噪声成分。由于成像距离、大气折射、光学离焦、镜头畸变等因素,目标大致为圆形斑点,可以用2D高斯对弱小目标建模,即:
(2)
目标区域均匀质密且各向同性,由峰值高度A,水平和垂直范围参数σx和σy确定,(x0,y0)表示目标中心位置。根据红外成像特点及对可见光图像的实际工程需要,假设目标强度高于背景,如图1所示。传统空域检测方法忽略背景本身的不连续性,易残留背景边缘等非目标成分,同时不能有效突出低对比度目标。

图1 原始图像
由于低信噪比、低对比度场景下目标与背景在灰度上非常接近,直接利用灰度信息难以区分目标与背景。图像梯度直接反应像素间的相对强度及变化趋势,可以很好表现目标与背景在形态上的差异,有利于低对比度和信噪比场景下的弱小目标检测。
3 抑制梯度特征相似性检测弱小目标
3.1 梯度特征提取
根据上一节对目标的2D高斯建模可以发现目标各个方向梯度具有相同的分布特点,即过目标中心在垂直梯度方向两侧呈一正一负分布。
Gx(i,j)=I(i,j+1)-I(i,j-1)
(3)
Gy(i,j)=I(i+1,j)-I(i-1,j)
综上所述,公共性观念的发展对西方美术馆建筑空间形态的演变有重要影响,西方建筑师对美术馆建筑空间形态的探索始终是站在时代背景和社会背景下,对人们的公共生活模式做出回应。笔者希望以上对西方美术馆空间形态演变的研究能为我们深刻理解美术馆各项活动的本质属性提供参考,并为当下及未来美术馆的发展方向提供历史借鉴。
(4)
G45(i,j)=I(i-1,j+1)-I(i+1,j-1)
(5)
G-45(i,j)=I(i+1,j+1)-I(i-1,j-1)
(6)
图2为图1由式(3)~(6)得到的四个方向梯度。其中(i,j)为像素位置,Gx、Gx、G45和G-45分别对应水平方向x梯度、垂直方向y梯度、沿水平方向逆时针旋转45°梯度与沿水平方向顺时针旋转的-45°梯度。图2中平稳背景区域梯度响应值较小,边缘区域仅在垂直边缘的梯度方向上具有较大的响应,而目标在各个方向上都有明显的正负分布。融合多个方向梯度特征可以使背景边缘相互抑制,目标区域相互增强。但融合的方向越多所需计算量越大,并且可能导致对低对比度、低信噪比目标检测范围缩小,影响检测效果。综合考虑检测效率与检测效果,在实际应用中选择x梯度与y梯度两个方向梯度特征进行融合。
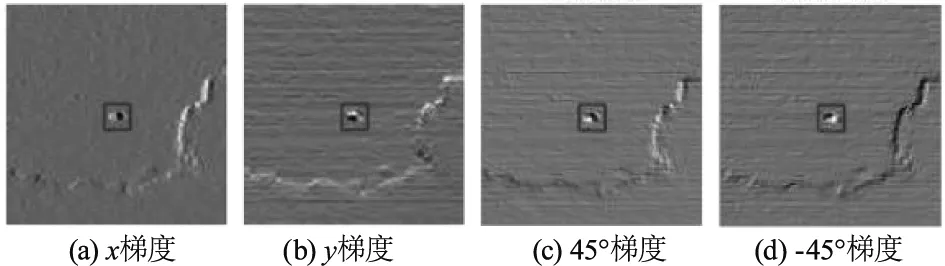
图2 方向梯度
根据目标大小及在梯度空间的正负分布,设计如图3(a)、(b)的5×5模板Mx、My提取x与y方向梯度特征。根据式(3)~(4)计算得到x与y梯度图后,使对应模板按式(7)在梯度图上滑动得到相应的梯度特征结果:
d={x,y}
(7)

图3 梯度特征提取模板
GFd(Gradient Feature)为梯度特征提取结果,gd为梯度,Md为特征提取模板。因为在GFd中目标区域梯度特征值均为正,将特征图中小于零的元素置为零,采用式(8)融合两个方向梯度,使目标区域梯度特征相互增强,背景边缘区域梯度特征相互抑制,得到如图4(d)的梯度特征融合结果。
fused(i,j)=GFx(i,j)*GFy(i,j)
(8)
图4(a1)、4(a2)为原始图像。(a1)包含较强的边缘背景,(a2)目标对比度较低;(b1)~(b2)与(c1)~(c2)分别为两个场景x梯度特征与y梯度特征;(d1)~(d2)为融合结果。融合后的梯度特征不仅对强边缘背景具有良好的抑制效果,而且能够有效突出低对比度图像中的目标区域。
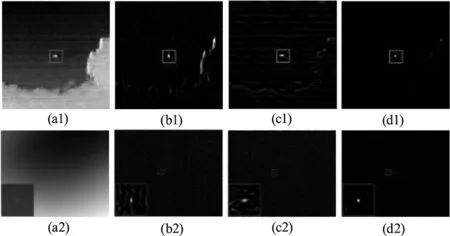
图4 梯度特征图
3.2 梯度特征相似性抑制
通过上述处理得到的融合结果中仍然存在残余背景,在检测中将导致较高的虚警,主要原因有以下两点:
(1)与所取梯度方向均不垂直的边缘在梯度特征中具有较大响应。遍历所有方向寻找梯度特征响应最小的方向可以去除边缘噪声,但会带来极大的计算量,且不利于低对比度目标的检测。
(2)背景具有较大连续变化区域(如图4(a2))使梯度连续负或连续正变化,可能导致较高的梯度特征响应。
为从背景中准确分离目标,需要对梯度特征进一步处理。弱小目标检测的一个重要假设是背景连续而目标不连续,图4(a1)~(c1)可以看出,这一假设在方向梯度特征中仍然存在,背景边缘在沿边缘分布方向上依然是连续的。因此对方向梯度特征进行相关性抑制一方面可以抑制连续分布的残余边缘,另一方面可以进一步突出目标。
LCM算法是抑制相关背景同时突出目标区域的方法。LCM算法通过滑窗的方式计算显著性。首先将窗口区域分成3×3的小区域块并标号。标号0表示中心区域,标号1~8为其8个邻域区域。由式(9)计算中心区域与邻域的对比度系数,ln为中心区域最大值,mi为对应标号邻域均值,Ci为中心区域与邻域的对比度系数,取ln与Ci乘积的最小值作为LCM算法最终结果,即式(10):
(9)
LCM=min(ln·Ci) (i=1,2,…,8)
(10)
直接使用LCM算法抑制梯度特征相关性后的融合结果如图5(a)所示。首先传统LCM算法存在明显的块效应,另外采用比值的方式计算对比度系数不适于存在大量0元素的梯度特征结果,例如当中心区域与领域相似,且中心区域均值不为零,邻域均值为零时将产生较大的结果,与期望的结果不符。式(11)、(12)用中心区域均值代替最大值可以解决块效应问题,用差值取对数的方式计算对比度系数更适应梯度特征结果。SS(Similarity Suppression)为相似性抑制结果,如图5(b)所示。
Ci=log(|m0-mi|+1) (i=1,2,…,8)
(11)
SS=min(m0·Ci)
(12)
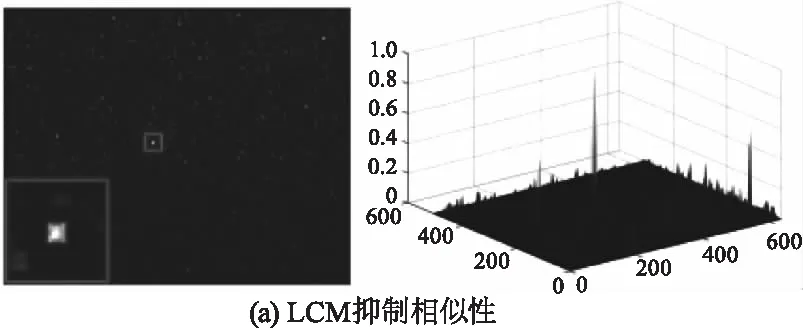
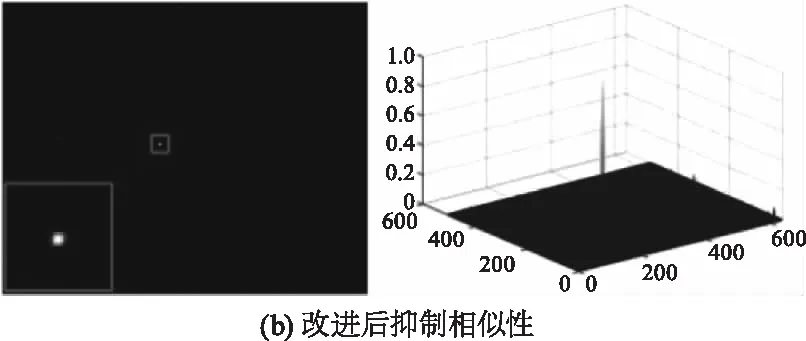
图5 梯度特征相关性抑制结果
3.3 算法流程
图6为梯度特征提取结合相似性抑制GFSS(Gradient Feature Similarity Suppression)检测弱小目标的整体算法流程。首先在获得原始图像x与y梯度后,通过图3所示模板提取x与y方向的梯度特征,之后通过式(11)~(12)改进的LCM算法分别抑制两个方向梯度特征相似性,消除残余背景,最后将结果进行融合。融合结果中目标区域得到明显增强,背景基本被抑制,通过式(13)自适应阈值分割即可将目标与背景分离,其中μ与σ分别为待分割结果的均值与标准差,k为经验值,通常取[25,40]:
Threshold=μ+kσ
(13)
4 实验结果
4.1 评价指标与对比算法
常使用信噪比SNR与背景抑制因子SBF评价弱小目标检测难度与算法背景抑制效果:
(14)
(15)
其中,μt与μb分别表示目标区域与邻域背景区域均值;σb为背景区域标准差;σin和σout分别为原始图像和已处理图像背景区域标准差。SNR越高表明目标信号越强,越容易检测。包含复杂背景与噪声的原始图像通常具有较高的标准差,处理后的图像背景受到抑制,标准差也会降低,因此BSF值越高表明算法对复杂背景抑制效果越好。
常用检测率Pd与虚警率Pf来评价算法的检测性能:
(16)
(17)
在对比实验中选择Top-hat算法作为基准对比算法,另外选择基于对比度的MPCM(Multiscale patch-based contrast measure)算法[14]、Liu等人提出的梯度方向散度加权多尺度通量密度WMFD(Weighted Multiscale Flux Density)算法[15]和加权图像熵MGDWE(Multiscale Gray Difference Weighted Image Entropy)算法作为对比算法。
4.2 检测结果
选择图7(a1)~(f1)的6组包含弱小目标的不同场景图像序列进行测试。序列1~4为红外图像,背景中包含复杂云层边界和非均匀性干扰,目标与背景具有不同对比度,序列5、6为实际采集强天光背景的可见光图像,背景强度过高导致目标完全被淹没,肉眼难以分辨,且存在严重的渐晕现象,这些都对弱小目标检测带来极大困难。表1列出6组实验图像序列的具体信息,其中CON表示目标与背景对比度,CON值越低表示对比度越弱,检测难度越大。
(18)
所提算法及对比算法的检测结果展示在图7中,图7(a2)~(a6)依次为Top-hat、MPCM、WMFD、MGDWE和所提算法对图像序列1的检测结果,图7(b)~(c)依次为序列2至序列6检测结果。

图6 算法流程

图7 不同算法对6组序列检测结果
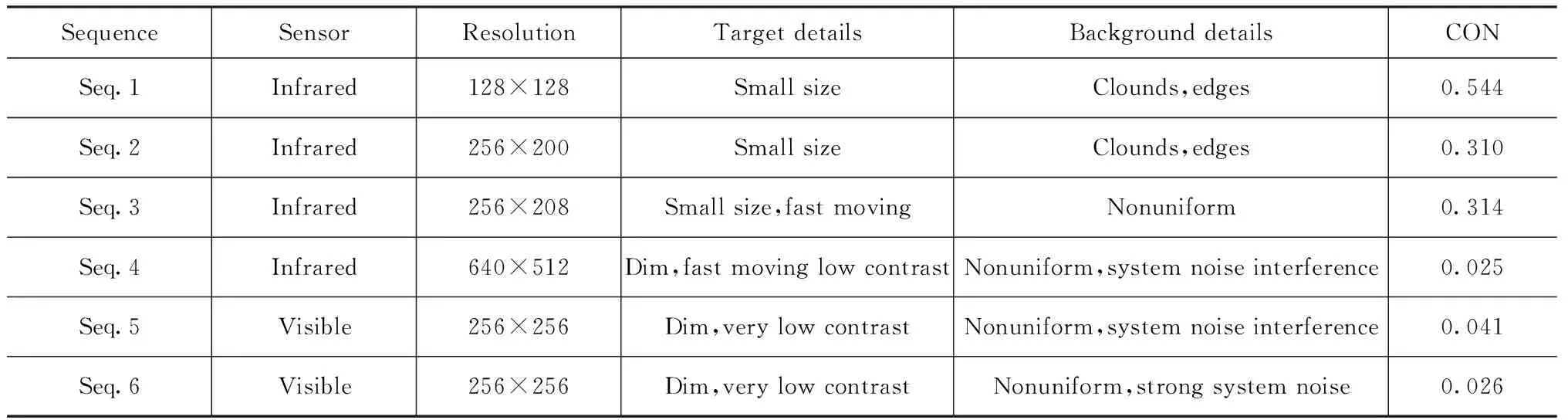
表1 测试图像具体信息
本文算法对复杂红外图像与低信噪比、低对比度的强光背景可见光图像都有较好的背景抑制和目标增强能力,结果图中几乎没有残余背景。基于背景建模的Top-hat算法不能有效抑制云层边缘,其结果中存在大量残余背景。MPCM没有考虑到背景本身存在的不连续性(如对序列2同时增强了云层间隙)及目标区域被背景淹没的情况,导致结果中不仅残留背景,且未能有效突出低对比度图像中的目标区域。WMFD和MGDWE一定程度增强低对比度目标,但在序列5与序列6中残留了由系统噪声导致的条纹状背景。
表2与表3分别给出上述算法处理结果的信噪比SNR与背景抑制因子BSF,其中粗体表示最优结果,下划线为次优结果,“—”表示没有检测到目标,未能计算结果。本文所提算法仅序列6的背景抑制因子为次优结果,其余均为最优。通过实验证明所提算法在背景抑制与目标增强上都优于其他方法,尤其对实际采集的低信噪比、低对比度的场景具有很好的效果,在受严重系统噪声干扰的图像序列序列4、5、6上的检测结果证明算法对噪声具有一定抗干扰能力。
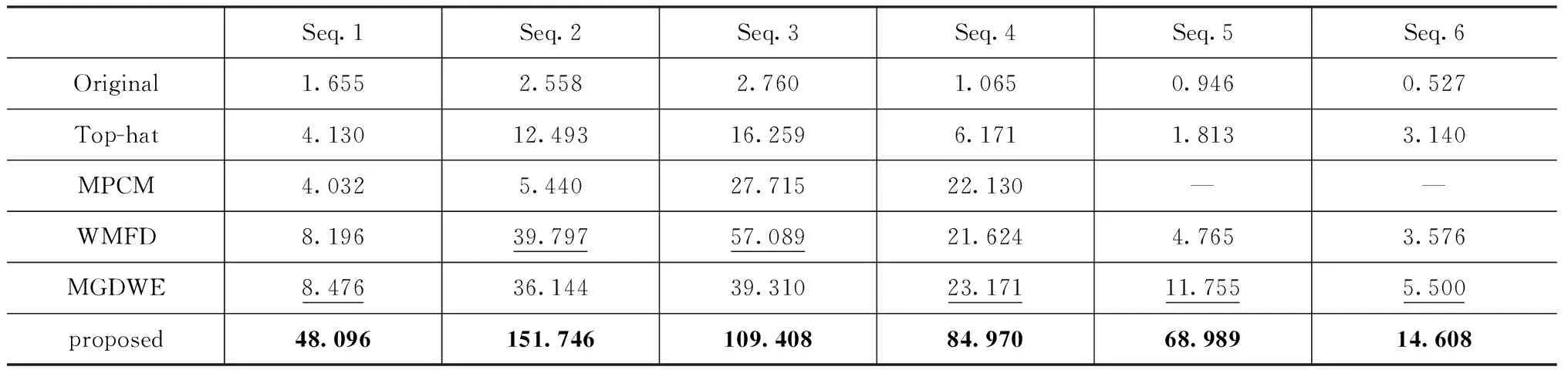
表2 不同算法信噪比
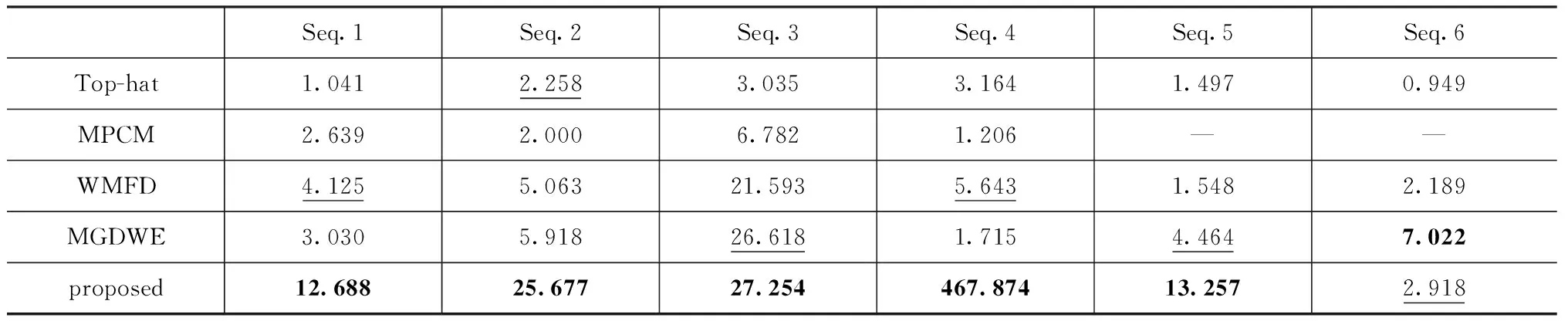
表3 不同算法背景抑制因子
由于MPCM方法未能检测到序列5与6中的目标,因此只统计各方法在序列1、2、3、4中检测到的目标个数与误检数,计算检测率与虚警率。序列1至4共有542帧图像,共包含542个弱小目标,不同方法的检测率与虚警率见表4。
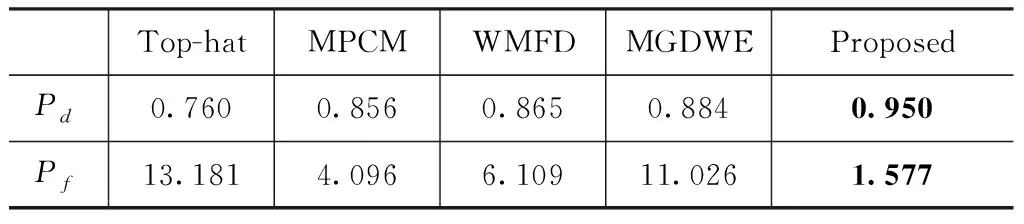
表4 检测率与虚警率
运行时间的对比实验在计算机CPUi5,1.8GHz、RAM4GB上进行,所有方法均在Matlab平台实现,结果见表5。序列4图像分辨率较高,本算法及各对比算法在该序列上耗时较长。本文所提方法通过滤波方式提取梯度特征,运行时间仅次于MGDWE算法,对不同场景检测所需时间均为毫秒级,可以满足实际应用中的实时性要求。
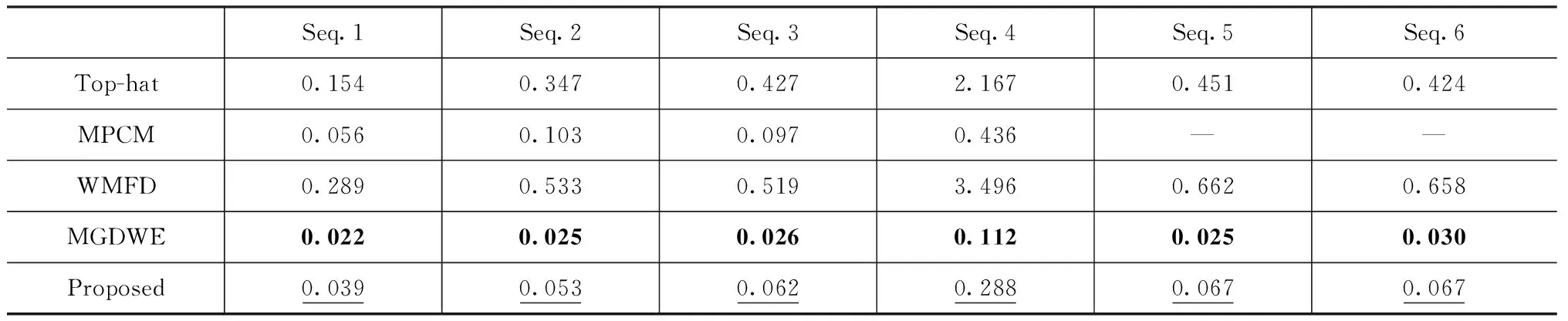
表5 运行时间对比结果 (单位:s)
5 结 论
本文通过分析弱小目标结构特征,针对低对比度图像提出一种基于梯度特征提取的单帧弱小目标检测方法,并对得到的方向梯度特征抑制相似度,从而消除方向梯度特征中的连续边缘背景,通过融合两个方向梯度特征,进一步抑制背景,增强目标,得到最终的检测结果。实验表明,本文所提方法能够有效检测含有云层等复杂背景的弱小目标图像,且对低对比度场景的红外与可见光图像检测效果显著优于其他算法。通过采用模板对方向梯度滤波获得梯度特征的方法,简化了算法结构,节省运行时间,满足实时性要求。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
雪豆月读·高年级(2020年2期)2020-09-10
奥秘(创新大赛)(2020年7期)2020-07-27
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
飞天(2018年8期)2018-10-29
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年12期)2017-04-23
红领巾·萌芽(2015年1期)2015-04-10