柔性接入微电网的改进VF 控制策略
2022-03-04 02:19卢红文袁旭峰张腊华
电力科学与工程 2022年2期
卢红文,袁旭峰,张腊华
(贵州大学 电气工程学院,贵州 贵阳 550025)
0 引言
微网是由DG、储能装置、负荷、能量转换装置及监控保护装置等整合成的小型发、配电系统[1-2]。通过微网将各类DG 接入配网,是利用新能源的一种有效手段。由于受到自然条件的影响,微网内以风能、太阳能为代表的DG 电能输出具有较大的波动性和间歇性[3]。当微网与配网之间通过传统硬开关进行连接时,这种波动和间歇再加上微网内各DG 投切的变化与负荷的变化,会造成电网公共连接点(point of common coupling,PCC)电压和频率的波动,这种波动若处理不当,不仅对微网造成危害,也会影响配网稳定[4-5]。
利用BTBC 取代传统PCC 硬开关,将微网柔性接入配网,有助于提升系统稳定性[6]。BTBC 由2 个电压源变流器(voltage source converter,VSC)组成,通常情况下,其中一侧VSC 采用定Udc控制,另一侧VSC 则采用定P 控制。相关文献研究了BTBC 采用定功率控制会对并网系统的稳定产生不良影响。文献[7-8]指出:采用定功率控制时,BTBC 直流侧呈负阻抗特性;且随着功率的增大,负阻抗特性越严重,从而影响系统的稳定裕度和稳定性。文献[5]的应对思路是在采用定Udc控制的变流器中引入虚拟电阻,以增加系统阻尼。文献[6]为抑制因BTBC 直流侧呈负阻抗特性而产生的振荡,提出了一种虚拟阻感性阻抗稳定性控制;但是,虚拟阻抗的引入会造成电压跌落,且其值增加越多,电压跌落越多。文献[9]在传统定功率控制基础上进行了优化,将负阻抗校正为正阻抗,提升了系统稳定性。
经BTBC 将微网柔性接入配网时,BTBC 的配网侧VSC 可以采用定Udc控制,以保证直流侧电压稳定。考虑到微网内部容易出现随机性扰动的问题,微网侧VSC 除了要保证功率传输稳定外,还应起到稳定微网母线电压和频率的作用。文献[10]针对微网并网时出现的各类不稳定现象,利用阻抗分析法、奈奎斯特稳定性方法分析了互联系统的等效阻抗,总结出导致系统不稳定的原因。文献[11]针对微网并网运行时,由于负载接入过多而导致的系统不稳定问题,在文献[8]的基础上提出一种能提升系统稳定性的有源阻尼方法。文献[12]着眼于控制器参数对系统稳定性的影响,提出了衡量控制器参数对振荡影响程度的灵敏度指标。上述文献从理论上对并网系统的不稳定现象进行了分析,并总结了造成该问题的原因。
目前,关于利用BTBC 进行柔性并网时的控制策略方面的研究文献较少。文献[13]将虚拟同步发电机技术用于BTBC 中,在传统控制结构基础上引入纯微分补偿,使系统阻尼与动态性能得到提高;但是,该方法存在控制算法比较复杂的问题,不利于工程实际应用。
本文着力于探究一种能尽量降低微网控制系统的复杂度,同时又能提高其稳定性的方法,具体思路是:在有源阻尼思想的基础上,在传统VF控制环中引入微分控制环节,推导其传递函数表达式,分析其对系统稳定性和动态性能的影响,并给出参数选取原则,最后在PSCAD/EMTDC 平台上搭建相应的仿真模型,从多个工况下验证所提方法在保证原有系统控制参数不做改变的条件下,增加系统阻尼,提升系统抗干扰能力。
1 传统VF 控制
利用BTBC 代替传统PCC 硬开关,将微电网柔性接入配电网,如图1 所示[14]。微网内,各DG经电力电子变流器接入微网,其电压等级为380 V,工作频率为50 Hz。BTBC 由配网侧VSC1、微网侧VSC2 组成。

图1 BTBC 接入的微电网Fig.1 Microgrid based on BTBC access
微网内变流器采用下垂控制策略[15-18]。BTBC配网侧VSC1 要维持BTBC 直流侧的电压稳定,采用定直流电压Udc控制策略;而微网侧VSC2采用VF 控制,保证微网母线的电压和频率稳定。
采用传统VF 控制策略的VSC 控制框图如图2 所示,双环传递函数框图如图3 所示[19]。

图2 传统VF 的控制策略框图Fig.2 Control strategy block diagram of traditional VF

图3 传统VF 的双环传递函数框图Fig.3 Double loop transfer function block diagram of traditional VF
在图3 中,Gvu(s)、Gi(s)分别是比例、积分等效传递函数,有

通过式(2)得图2 的闭环传递函数、等效阻抗分别为式(3)(4),其中包含的相关参数如表1 所示。

表1 主要控制参数Tab.1 Main control parameters
系数矩阵为:

通过对式(4)分析可以发现,传统VF 控制系统的阻尼较小,频率的变化对等效阻抗有一定的影响;但Kv_up和Kv_ip对等效阻抗的影响很小,几乎可以忽略。可见通过改变控制参数的方式来提高VF 控制系统的阻尼,其效果不理想。具体分析过程可以参考文献[20]。
因此,若将传统VF 控制策略用于微网并网,当发生DG 投切和负荷变化时,由于其控制系统阻尼较小,系统抗干扰性能较差,可能会引起系统振荡,不利于系统稳定[21-22]。
2 改进VF 控制
2.1 传递函数模型
遵循既能降低控制系统的复杂度,又能达到增加系统阻尼的原则,本节基于有源阻尼思想,在传统VF 控制的基础上,在不改变原有系统控制参数条件下,对其控制环进行改进,如图4 中虚线所示。

图4 改进VF 的双环传递函数框图Fig.4 Double loop transfer function block diagram of improved VF control
比例控制的优点是可以一定程度上提高控制系统的响应速度;缺点是在提高响应速度的同时,无法达到消除稳态误差的目的[23]。因此,在比例控制的基础上加入如图4 所示的Mu(s)、Mi(s)微分控制环节,二者互相配合,可以使控制系统阻尼、系统的稳定性得到提高。
推导图4 所示的系统闭环传递函数、等效阻抗、开环传递函数:

系数矩阵为

2.2 参数确定
由公式(6)—(8)可知,系统的稳定性及动态性能与Ku、Ki的取值联系紧密。按照闭环系统带宽的定义先确定Ku的取值[20]。

令上式等于0.707,得:

式中:t=0.293Kv_uP–0.414。
为保证式(6)的成立,Ku需满足式(11):

由式(7)计算得,阻尼比在Ku=0.4,Ki=0.8时取得最大值。控制参数Ku和Ki变化对等效阻抗的影响:当Ku增大时,Z(s)幅值呈减小趋势;当Ki增大时,Z(s)幅值呈先增大后减小趋势。取Ku=0.4,计算得对应的阻尼比和相位裕度如表2 所示。当Ku的值确定后,Ki的取值将受到阻尼比和相位裕度的限制。阻尼比的大小会影响到系统的调节时间,其值并不是越大越好,通常在0.4~0.8[20];相位裕度与系统的稳定性、动态性能有关,本文取Ku=0.4,Ki=0.6。
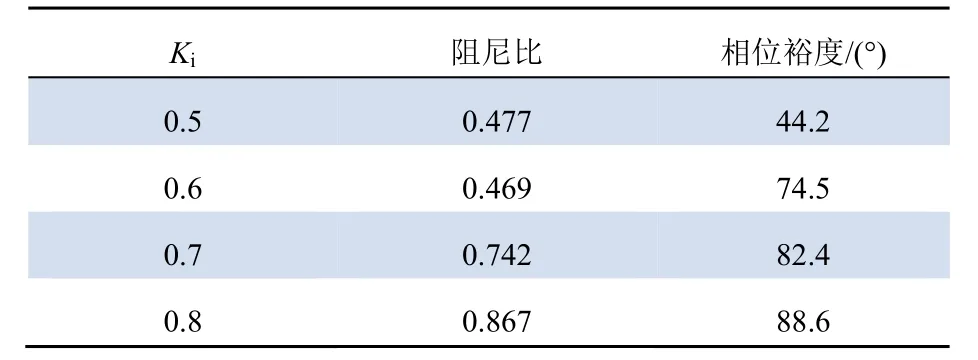
表2 阻尼比和相位裕度Tab.2 Damping ratio and phase margin
3 仿真验证
搭建如图5 所示的基于BTBC 接入的微电网仿真模型,系统主要参数如表3 所示。从DG 的投切、负荷变化2 个工况下对比分析,验证改进控制策略的有效性与正确性。

图5 基于BTBC 接入的微电网仿真模型Fig.5 Microgrid simulation model based on BTBC access

表3 系统主要参数Tab.3 Main parameters of the system
3.1 DG 的投切
设置3 台容量为25 kW 的DG1、DG2、DG3,其中DG1、DG2 始终并网运行。设置1 s 时DG1离网,经0.05 s 后重新并网;2 s 时DG3 并网运行。仿真结果如图6、图7 所示。图7 中:P1 表示改进前微网的输出功率;P2 表示改进后微网的输出功率。


图6 DG 投切工况下2 种VF 控制策略的仿真波形Fig.6 Simulation waveforms of two VF control strategies under DG switching condition
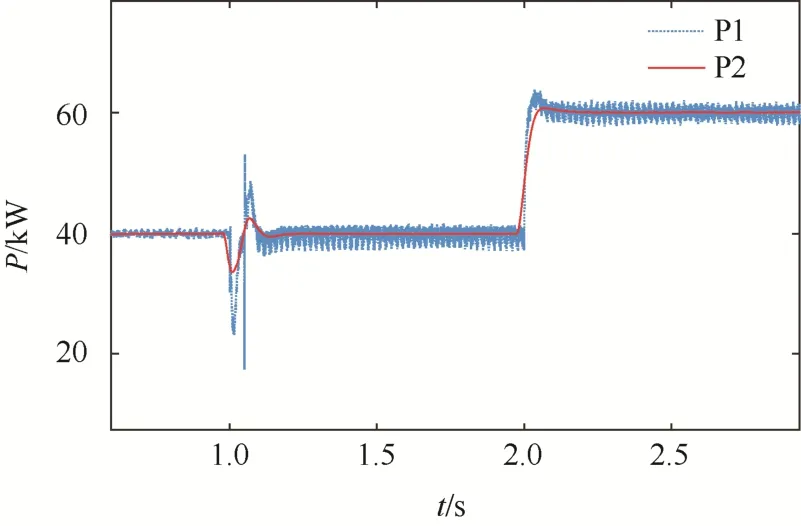
图7 DG 投切工况下微网输出功率改进前后对比Fig.7 Comparison of microgrid output power before and after improvement under DG switching condition
通过图6(a)(b)可以看出,未改进前,PCC点的电流、电压响应曲线波形质量较差,并且在DG 投切时,PCC 点电压、电流会出现较大振荡,危害系统稳定性。
改进后,如图6(c)(d)以及图7 所示,PCC点处的电压、电流波形明显变好,且输出功率曲线也平稳很多。
3.2 负荷变化
设置负荷:Load1(10 kW),Load2(10 kW)。1 s 前微网输出功率为40 kW;Load1 在1 s 时接入微网,持续1 s 后断开;Load2 在1.5 s 时接入微网,同样持续1 s 后断开。图8、图9 给出了改进前后PCC 点的电流、电压及微电网输出功率的仿真响应曲线。

图8 负荷变化工况下2 种VF 控制策略的仿真波形Fig.8 Simulation waveforms of two VF control strategies under load changing conditions

图9 负荷变化工况下微网输出功率改进前后对比Fig.9 Comparison of microgrid output power before and after improvement under load changing conditions
由图9 可以看出,1 s 之前,微网输出功率为40 kW。1 s 时投入Load1,微网输出功率升为50 kW。1.5 s 时投入Load2,微网输出功率升为60 kW。2 s 时Load1 断开,微网输出功率降为50 kW。2.5 s 时Load2 断开,微网功率降为40 kW。整个运行过程中,在负荷投切时,未改进前PCC点的电压、电流以及微电网输出功率响应曲线较为粗糙,改进后能明显看出各波形曲线质量提升较大。
从以上2 个工况下的仿真结果可以看出:改进前,控制系统的阻尼较小,系统抗干扰能力弱,在发生DG 投切或负荷变化时,PCC 点的电压、电流以及微网的输出功率响应曲线较为粗糙,波形质量较差。利用改进控制策略后,面对扰动时,PCC 点电压、电流波形质量得到提升,微网的输出功率响应曲线变光滑,达到了增加控制系统阻尼,提升系统抗干扰能力的目的,验证了本文所提改进控制策略的有效性与正确性。
4 结论
本文利用BTBC 代替传统PCC 硬开关,实现配网与微网的柔性互联,并针对BTBC 采用传统VF 控制时存在的稳定性问题,在有源阻尼的基础上提出一种改进VF 控制策略,并搭建基于BTBC接入的微电网仿真模型,从DG 的投切、负荷变化2 个工况下对比分析,得出以下结论。
(1)改进后的控制策略在保证原有系统控制参数不做较大改变的条件下,能够达到增加控制系统阻尼的目的,提升系统的抗干扰能力,降低DG 投切及负荷变化时引起的振荡。
(2)调节改进控制环的参数Ku、Ki,可以改变BTBC 的等效输出阻抗,其中,Ku的取值按闭环系统带宽定义得Ku>0.18,而Ki的取值受阻尼比和相位裕度的限制,Ki∊[0.5,0.8]。
猜你喜欢
航空发动机(2022年4期)2022-10-13
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
振动工程学报(2019年2期)2019-05-13
演艺科技(2017年1期)2017-03-09
科技视界(2016年18期)2016-11-03
现代商贸工业(2016年4期)2016-10-14
建筑工程技术与设计(2015年29期)2015-10-21
现代电子技术(2015年17期)2015-09-23