
军用电子元器件筛选智能化分选设计
2022-03-17 08:33荆晓莹石蕊
电子测试 2022年4期
荆晓莹,石蕊
(陕西省电子技术研究所,陕西西安,712000)
0 引言
军用电子元器件筛选是军用电子元器件质量测控中的重要环节,为提高军用电子元器件质量检测效率提供方法支持[1]。在筛选军用电子元器件过程中,需要进行分选,根据军用电子元器件的质量等级进行分类包装,进而为军用电子元器件的质量管理提供真实、可靠的数据。由于军用电子元器件机械自动化程度不断加深,其流水线作业对于智能化分选提出了更高的要求[2]。
传统针对军用电子元器件筛选的智能化分选设计主要通过元件参数分选仪的检测功能实现,通过该设备,得到其智能化分选结果。但传统军用电子元器件分选过程中由于智能化程度不足,在很多环节依然需要人工操作,无法实现真正意义上的智能化。在实际分选时,对于以往设计对军用电子元器件筛选数据采集速率较慢,对其的处理需要耗费一定的时间,导致军用电子元器件筛选智能化分选频率低。由此可见,传统军用电子元器件筛选智能化分选设计中存在的不足已经逐渐显露出来,需要对其进行优化设计。基于此,本文重新提出军用电子元器件筛选智能化分选设计,致力于提高军用电子元器件筛选智能化分选频率,提升军用电子元器件筛选效率。
1 军用电子元器件筛选智能化分选设计
在军用电子元器件筛选智能化分选设计中,其最主要的功能为通过机械手智能抓取军用电子元器件,送至检测口进行检测,处理检测结果,根据军用电子元器件等级分级存放,并上传数据,记录关键质量等级数据,存档保存[3]。军用电子元器件筛选智能化分选设计流程图,如图1所示。
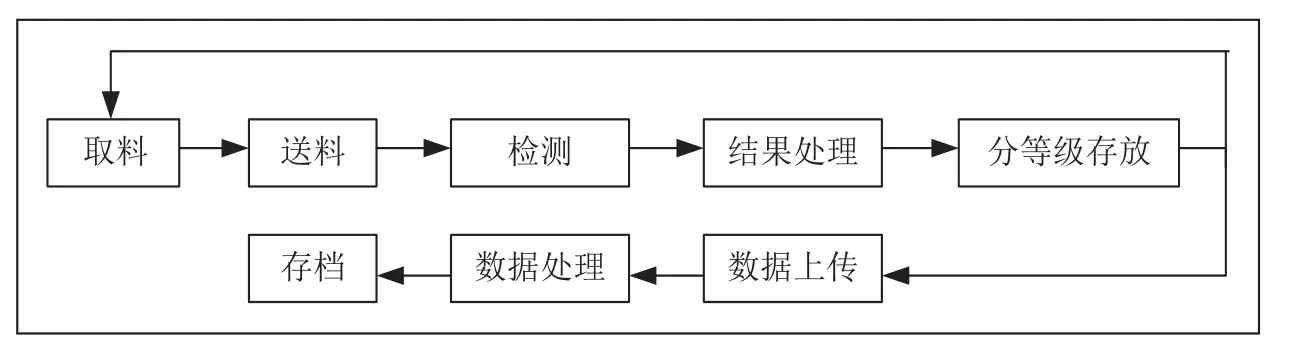
图1 军用电子元器件筛选智能化分选设计流程
结合图1所示,为军用电子元器件筛选智能化分选设计流程。本文针对图中4步主要流程的内容加以阐述,如下文所述。
1.1 机械手智能抓取军用电子元器件
在军用电子元器件筛选智能化分选设计中,为满足其智能化要求,减少人工操作,本文采用机械手智能抓取军用电子元器件。首先,根据机械手位置信号调用内部算法;而后,通过控制电机向机械手发送军用电子元器件抓取信号,设机械手智能抓取到的军用电子元器件信号表达式为E(t),则有公式(1)。

公式(1)中,S指的是机械手智能抓取军用电子元器件的目标位置;R指的是机械手智能抓取军用电子元器件的实际位置。通过公式(1),计算得到机械手智能抓取到的军用电子元器件信号,一旦发现E(t)>15%时,则证明机械手接收到的智能抓取军用电子元器件信号中存在较多冗余,必须保证E(t)<15%时,才能够确保机械手智能抓取军用电子元器件的精度。
1.2 检测军用电子元器件筛选等级
通过机械手智能抓取军用电子元器件将其送至检测口,检测军用电子元器件筛选等级[4]。在此过程中,本文采用流水线故障检测电路,经过微处理器,接收流水线故障检测电路检测到的军用电子元器件等级信号,并利用串口发送军用电子元器件筛选结果信号,以此得到军用电子元器件筛选等级结果。在此基础上,将军用电子元器件筛选等级结果数据作为智能化分选依据,采集一次检测军用电子元器件筛选等级信号,将其设定为采集成功标志,进行多次采集。通过将军用电子元器件筛选智能化分选数据上传,得到军用电子元器件筛选等级检测真实结果,为军用电子元器件筛选智能化分选提供核心数据。
1.3 模糊控制军用电子元器件筛选智能化分选数据
在检测军用电子元器件筛选等级的基础上,为保证军用电子元器件筛选智能化分选效率,本文采用模糊控制的方式,设军用电子元器件筛选智能化分选误差为e,其输入变量的变化结果为ec,模糊控制量为u。针对上述变量的模糊集控制量U,如公式(2)所示。

公式(2)中,NN指的是负大模糊集;NO指的是负中模糊集;NY指的是负小模糊集;PC指的是正小模糊集;PL指的是正中模糊集;PT指的是正大模糊集。根据对公式(2)的推导可得出军用电子元器件筛选智能化分选数据的模糊控制规则,如表1所示。

表1 智能化分选数据模糊控制规则
结合表1所示,为智能化分选数据模糊控制规则。将其用方程式的形式加以表现,可设其目标函数为E(nt),则有公式(3)。

公式(3)中,nt指的是军用电子元器件筛选智能化分选数据集;F指的是比例因子;e指的是输出控制量;k指的是量化因子[5]。通过公式(3),得到模糊控制处理后的军用电子元器件筛选智能化分选数据。
1.4 实现军用电子元器件筛选智能化分选
通过上述研究,利用伺服电机、分料机构以及分料平台作为实现军用电子元器件筛选智能化分选的核心设备[6]。与此同时,采用卧式分料结构,最大限度上缩短下料头半径,提高军用电子元器件筛选智能化分选速率。在此过程中,可以使用MATALB软件仿真的方式,模拟军用电子元器件筛选智能化分选的位置,其仿真曲线图,如图2所示。

图2 军用电子元器件筛选智能化分选仿真曲线图
结合图2所示,军用电子元器件通过位置的移动能够通过分料管精准进入指定的料盒,以此实现军用电子元器件筛选智能化分选。
2 实验
2.1 前期准备
构建实验,选取某军用电子元器件作为实验对象,实验目的为测试军用电子元器件筛选智能化分选设计在现实应用中的可行性。首先,使用本文设计方法进行军用电子元器件筛选智能化分选,通过Tchart控件记录分选频率,设置为实验组;再使用传统方法进行军用电子元器件筛选智能化分选,同样通过Tchart控件记录分选频率,设置为对照组。本文实验中,选取的对比指标为两种分选方法下测得的分选频率,测得的分选频率越高,证明该方法针对军用电子元器件筛选智能化分选效率越高。设定实验次数为10次,记录实验结果。
2.2 实验结果与分析
分选频率实验结果对比表,如表2所示:

表2 分选频率实验结果对比表
由表2中实验结果可以看出,本文设计方法与传统方法在波特率相同的情况下,其分选频率明显高于传统方法,证明本文提出军用电子元器件筛选智能化分选设计在现实应用中的可行性。因此,通过实验证明,本文设计内容能够实现对传统军用电子元器件筛选智能化分选的优化。
3 结束语
通过军用电子元器件筛选智能化分选设计,明确了军用电子元器件筛选智能化分选频率对于保证军用电子元器件筛选智能化分选流水线工作效率的重要影响。因此,能够证明本次设计是具有现实价值的,可以为军用电子元器件筛选工作的优化提供充足的理论依据。但本文仍然存在有待补充之处,主要表现为缺少对军用电子元器件筛选智能化分选管理方面的深入研究,这一点在后续的研究中希望可以成为其他同领域学者的重点研究方向。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
军民两用技术与产品(2022年7期)2022-08-06
农机使用与维修(2022年7期)2022-07-14
航天工业管理(2022年4期)2022-05-21
汽车实用技术(2022年3期)2022-02-23
机电工程技术(2021年3期)2021-09-10
航天工业管理(2021年4期)2021-05-19
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
