基于GPC 的燃气热泵空调控制技术研究
2022-03-17 00:48李子惟吴森起
天津城建大学学报 2022年1期
李子惟,苏 刚,张 研,吴森起
(天津城建大学 控制与机械工程学院,天津 300384)
燃气发动机的控制在整个热泵控制系统当中发挥着关键的作用[1]. 燃气发动机驱动压缩式热泵系统研究的意义在于热泵子系统是在燃气发动机按照预定控制要求稳定运行时,带动压缩机进行制冷剂循环运行,但是热泵机组的出水温度具有大惯性和强滞后的特性[2],动态响应不是很好,不能使燃气发动机根据室内外环境变化及时调整燃气消耗量,造成能源的浪费[3-5].因此,燃气发动机热泵系统在既能满足客户对热泵机组出水温度要求的同时,又能在无人干预的情况下节省运营维护的成本[6-7].
燃气热泵空调控制系统主要是针对控制过程的被控参数,如末端出水温度和燃气机转速.在实际操作过程中,这些参数条件下的变化反应迟缓和滞后现象非常明显,即外部环境条件的变化需要很长的反应时间[8]. 燃气发动机稳定高效运行的前提是热泵子系统稳定运行,对其有关动态特性的智能控制研究目前很少.本文建立了该系统的广义预测控制模型,并运用此模型进行了仿真.对于燃气机转速对节气门开度的模型,GPC 控制器表现出良好的动态响应特性.对于末端出水温度对燃气机转速的模型和蒸发器出口过热度对电子膨胀阀开度的模型,GPC 控制器均表现出较好的跟随输入性能[9-10].
1 燃气热泵及自动控制系统原理
燃气热泵系统原理及流程如图1 所示.以R134a制冷剂为例,制冷过程工作原理如下所述:低温低压的气态制冷剂在压缩机中等熵压缩成为高温高压的气态制冷剂;之后通过油分离器将高温高压的气态制冷剂和制冷剂中夹带的润滑油分离开,润滑油通过油管回到压缩机中;高温高压的气态制冷剂进入到冷凝器中等压放热,气态制冷剂的热量被冷却水吸收;高温高压的气态制冷剂释放热量变为高压液态制冷剂,这是一个等压放热的过程.
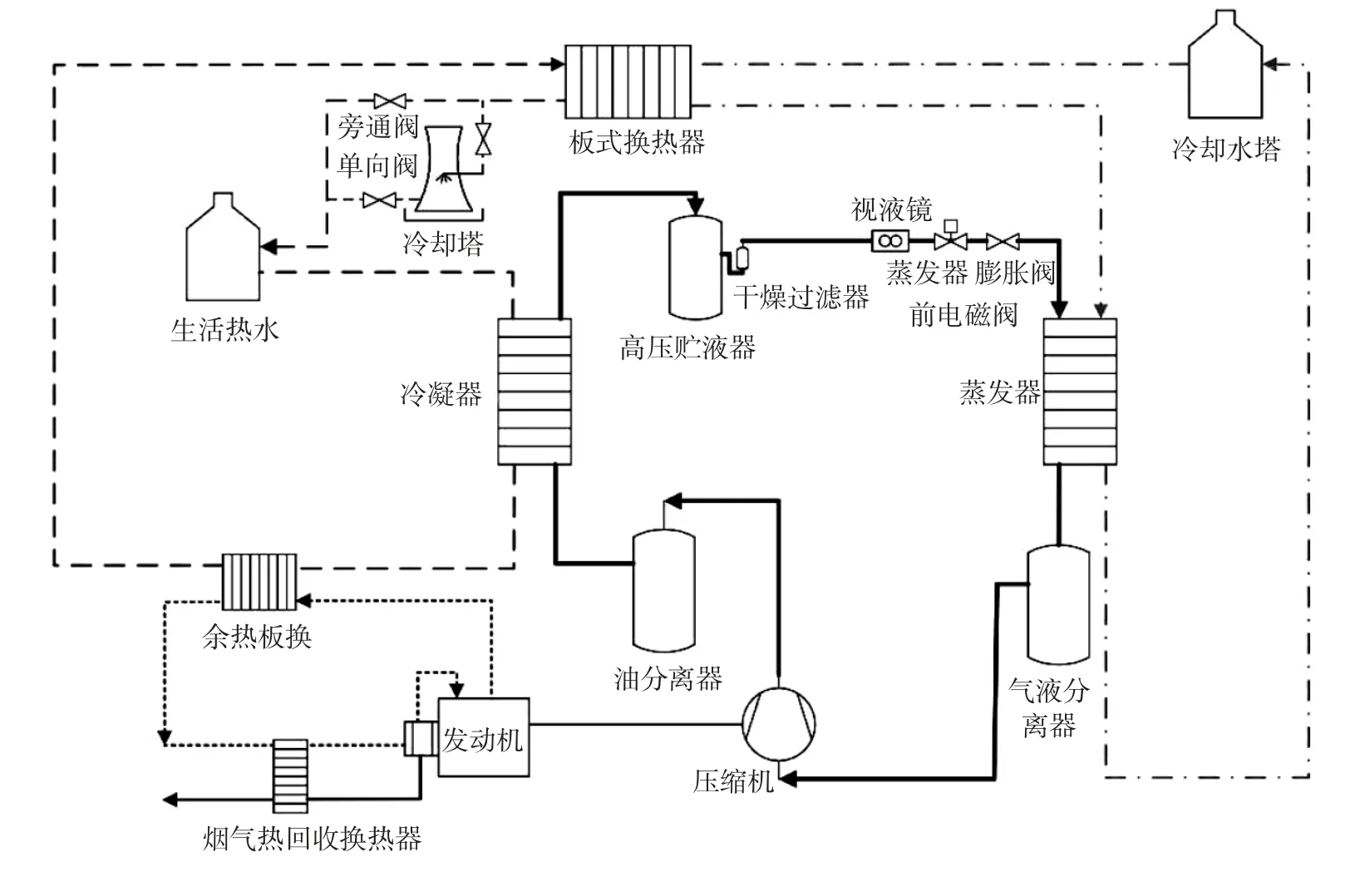
图1 燃气热泵系统制冷循环流程
本仿真根据广义预测控制手段,解决调整过程中时滞的问题,降低扰动量对热泵系统的热泵机组出水温度稳定性的干扰,使调整时间和相对稳定性达到最佳状态.同时,提高热泵系统控制的稳定性和工作效率,起到节能作用[11].
2 广义预测控制算法及参数的选择
广义预测控制算法扩大了反应系统动态行为的有用信息,提高了系统运行的稳定性和鲁棒性.预测函数控制基于预测控制原理发展起来,具有一般预测控制的3 个特点:建模预测、滚动优化、反馈校正[12-13].而它与其他预测控制算法的最大区别是注重控制量的结构形式,认为控制量与一组相应于过程特性和跟踪设定值的函数有关.因此,每一时刻计算的控制量由一组事先选定的函数线性组合而成,这些函数称为基函数[14].被控对象的数学模型采用下列离散差分方程(CARIMA 模型)描述.
目标函数为

CARIMA 模型为

引入丢番图方程后,该模型为

左右两边同乘Ej(z-1)Δ 得

其中:A(z-1)、B(z-1)和C(z-1)分别表示算子z-1的多项式;y(t)和u(t)表示被控对象的输出和输入;ω(t)表示随机扰动;Δ = 1 - z-1为差分算子;N1 为最小输出长度;N2 为最大输出长度;Nu 表示控制长度.
预测控制中的优化与通常的最优控制算法不同,这主要表现在预测控制中的优化目标不是采用一成不变的全局最优化目标,而是采用滚动式的有限时域优化策略.因此可以获得鲁棒性较好的结果,保持实际上的最优.
多步预测增加了预测时域长度P 和控制时域长度M 两个参数的选择[15].最小输出长度N1 的选择是当对象纯延时时间d 已知时,可选N1 等于d,此时矩阵的维数将降低,从而可以减少计算量.但在自适应控制的情况下,d 常常是时变或未知的,此时只能取N1=1.N1 可以在相当大的范围内选择而不会影响系统的稳定性[2].最大输出长度N2 的选择是由于性能指标函数中含有未来的控制,因此,输出长度N2 应考虑包括受当前控制影响较大的所有响应段,所以N2 应至少大于多项式B(z-1)的阶次.理论上N2 应选择更大一些,例如接近过程的上升时间.
完善了水资源配置体系。锦凌水库、青山水库、三湾水利枢纽分别完成总进度的89%、85%和88%,其中三湾水利枢纽已下闸蓄水。输水应急入连、长海县引水工程具备通水条件。观音阁水库输水工程开工建设。全年完成供水143亿m3,其中省直水利工程调放河道生态水6.58亿m3。
3 仿真结果分析
3.1 节气门开度输入与燃气机转速输出的研究
通过分析节气门开度输入与燃气机转速输出之间的特性,得到燃气机转速对节气门开度[3]的模型为

经z 变换得到

转换为CARIMA 模型为

3.1.1 对最大输出长度N2 的分析
图2 是GPC 在N1=2 且N2 为不同参数时的响应速度仿真曲线.此时是白噪声的方差为0.05 时,参数变化对系统的燃气机转速的影响.随着N2 增大,系统的稳定性也逐渐上升;当N2 接近过程的上升时间,此时仿真效果最佳,基本没有出现超调;继续增大N2,系统响应速度变快,但出现较大超调.由此可见,N1=2,N2=5 是一个临界参数点.
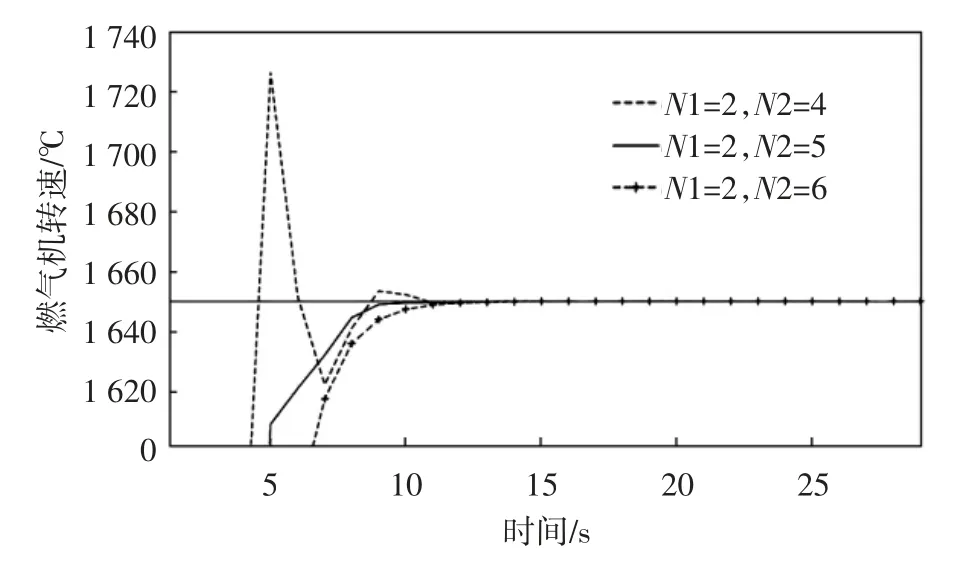
图2 GPC 在N1=2 且N2 为不同参数时的响应速度仿真曲线
图3 是GPC 在N2=5 且N1 为不同参数时的跟随输入仿真曲线.从图3 可以看出:N1=2、N2=4 的超调比较大,但响应速度是最快的;N1=2、N2=6 没有出现超调,但响应速度是最慢的;综合看来N1=2、N2=5 没有超调,且达到稳态的时间较短,综合性能较好.
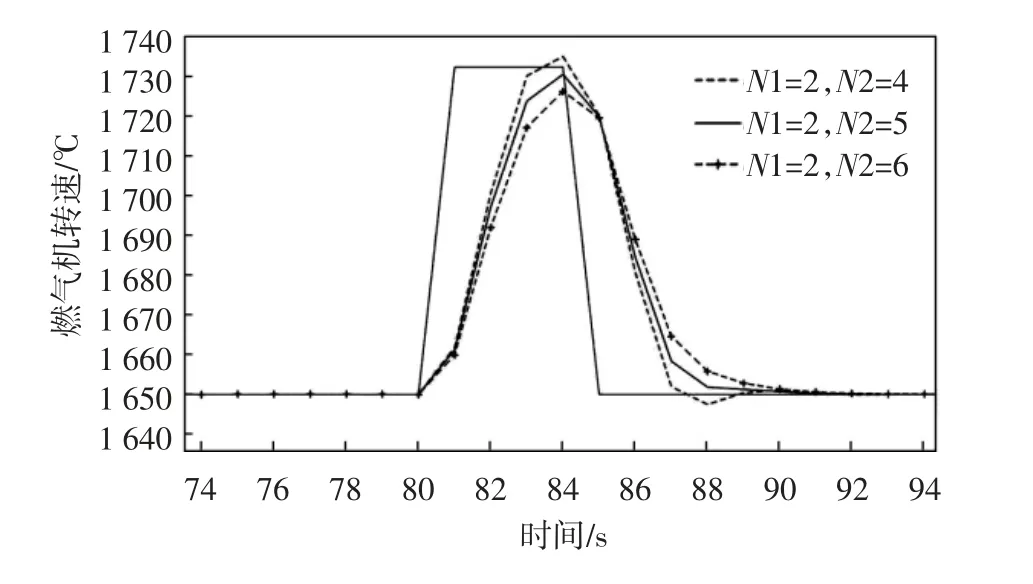
图3 GPC 在N1=2且N2 为不同参数时的跟随输入仿真曲线
3.1.2 对最小输出长度N1 的分析
图4 是GPC 在N2=5 且N1 为不同参数时的响应速度仿真曲线.由图4 可知,随着N1 增大,系统的稳定性也逐渐上升;当N1 接近d,此时仿真效果最佳,基本没有出现超调;继续增大N2,系统出现较大超调.由此可见,N1=2,N2=5 是一个临界参数点.
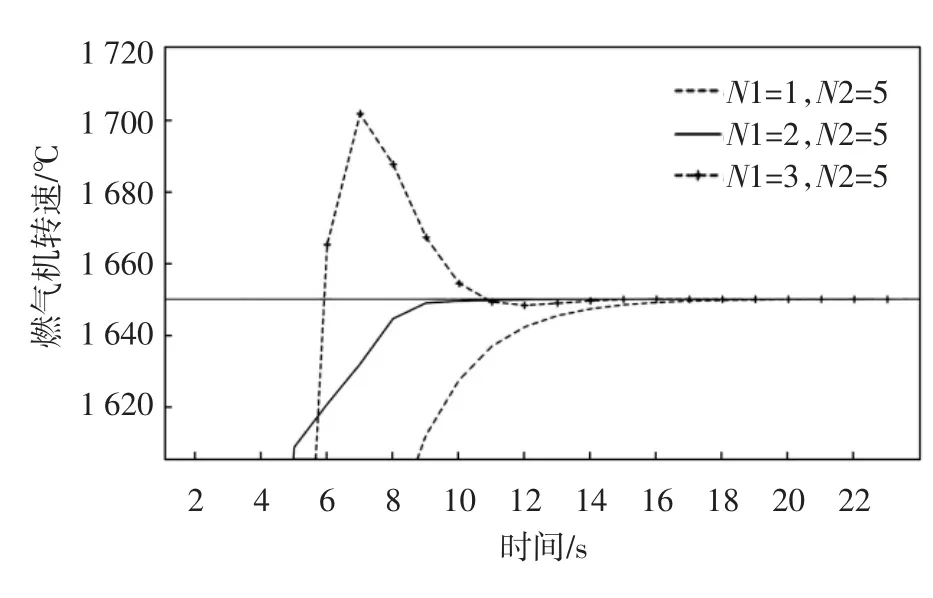
图4 GPC 在N2=5且N1 为不同参数时的响应速度仿真曲线
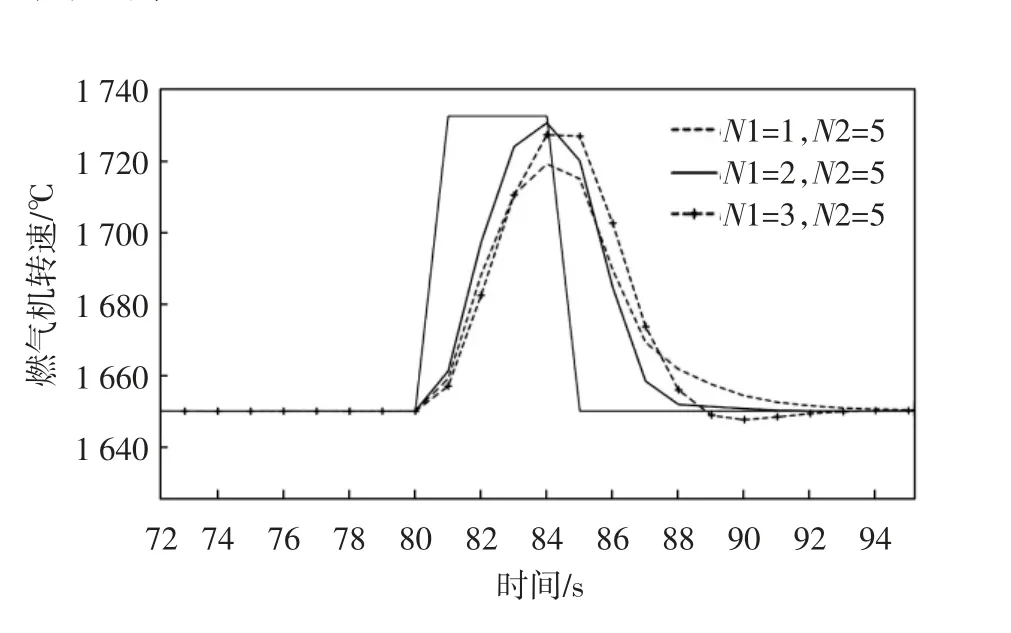
图5 GPC 在N2=5且N1 为不同参数时的跟随输入仿真曲线
3.2 末端出水温度输入对燃气机转速输出的研究
通过分析末端出水温度输入对燃气机转速输出之间的特性,建立了燃气机转速对末端出水温度[3]的模型,即

经最小二乘法辨识得到末端出水温度输入对燃气机转速为

转换为CARIMA 模型为

3.2.1 对最大输出长度N2 的分析
图6 是GPC 在N1=2 且N2 为不同参数时的响应速度仿真曲线,研究在方差为0.01 的白噪声干扰下,参数变化对系统的燃气机转速的影响.N1=2、N2=4 的超调比较大,但响应速度是最快的;N1=2、N2=6 没有出现超调,但响应速度是最慢的;综合看来N1=2、N2=5 达到稳态的时间较短,综合性能较好.
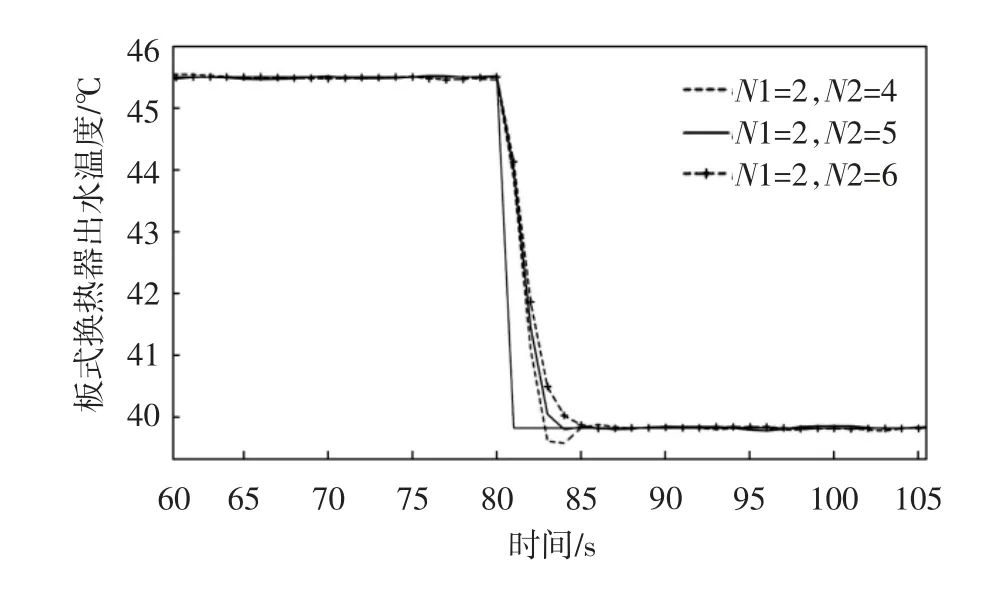
图6 GPC 在N1=2且N2 为不同参数时的响应速度仿真曲线
图7 是GPC 在N1=2 且N2 为不同参数时的跟随输入仿真曲线.在图7 中,随着N2 增大,系统跟随输入变化的能力也逐渐上升;当N1=2,N2=4 时,出现了明显超调;当N2 接近过程的上升时间,此时仿真效果最佳,基本没有出现超调,即N1=2,N2=5;继续增大N2 至N2=6,此时跟随输入变化的能力有所下降.由此可见,N1=2,N2=5 是一个临界参数点.
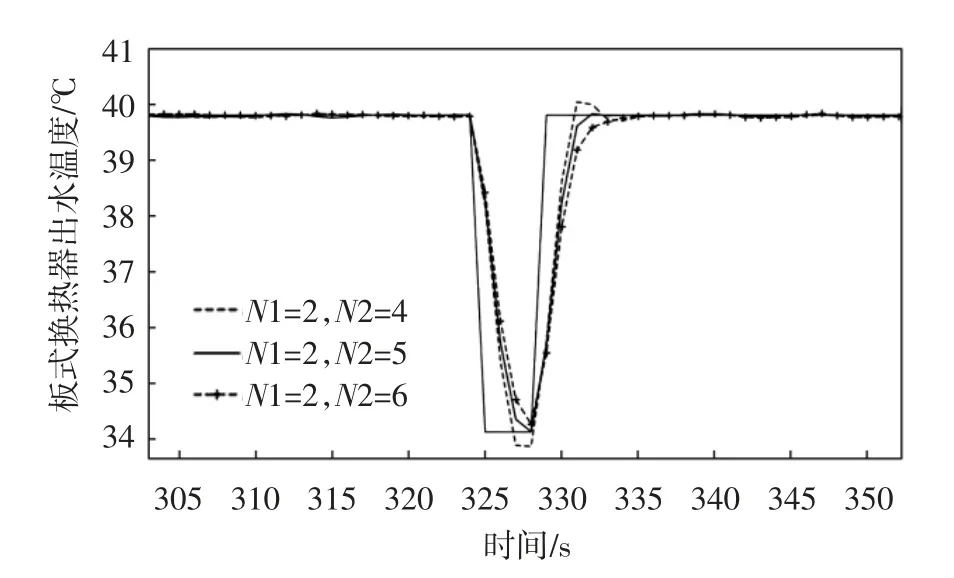
图7 GPC 在N1=2且N2 为不同参数时的跟随输入仿真曲线
3.2.2 对最小输出长度N1 的分析
图8 是GPC 在N2=5 且N1 为不同参数时的响应速度仿真曲线,研究在方差为0.01 的白噪声干扰下,参数变化对系统的燃气机转速的影响.当N1 接近d,此时仿真效果最佳,基本没有出现超调,且达到稳态时间最短;继续增大N1 至N1=3,此时系统出现超调.由此可见,N1=2,N2=5 是一个临界参数点.
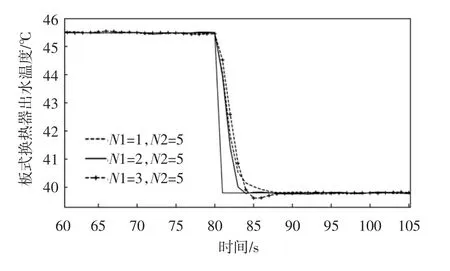
图8 GPC 在N2=5且N1 为不同参数时的响应速度仿真曲线
图9 是GPC 在N2=5 且N1 为不同参数时的跟随输入仿真曲线.相较于图7 来说,在图9 中N1=2、N2=5 的系统跟随输入优势体现的较为明显,它达到稳态的时间是最短的,而且超调是最小的;综合以上情况来看,N1=2、N2=5 是一个临界位置.
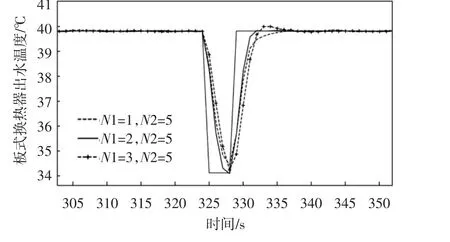
图9 GPC 在N2=5且N1 为不同参数时的跟随输入仿真曲线
4 结论
本文研究了燃气机转速对节气门开度的模型和末端出水温度对燃气机转速的模型.在仿真中,广义预测控制器有较快的响应速度,以及良好的跟随输入性能.
(1)广义预测控制可以减少参数之间的相互影响,也可以增加热泵系统的稳定性.在GPC 的控制参数的选择中,存在临界点;临界位置表现出良好的控制效果.
(2)对于燃气机转速对节气门开度的模型,广义预测控制器表现出良好的动态响应特性.当最大输出长度N2 接近过程的上升时间,此时仿真效果较好,基本没有出现超调.
(3)对于末端出水温度对燃气机转速的模型,广义预测控制器表现出较好的跟随输入的性能.当最小输出长度N1 接近纯延时时间,此时达到稳态的时间较短,控制效果较佳.
猜你喜欢
农业工程学报(2022年8期)2022-08-08
水上消防(2022年2期)2022-07-22
煤气与热力(2022年4期)2022-05-23
煤气与热力(2022年4期)2022-05-23
煤气与热力(2022年4期)2022-05-23
节能与环保(2022年3期)2022-04-26
大众投资指南(2021年23期)2021-12-06
商品与质量(2021年32期)2021-11-24
载人航天(2021年5期)2021-11-20
船舶(2021年4期)2021-09-07