基于被动红外传感器的室内人行为机器学习模型
2022-03-18 05:36张静思王纪隆张心悦
同济大学学报(自然科学版) 2022年3期
周 翔,赵 婷,张静思,王纪隆,张心悦
(同济大学 机械与能源工程学院,上海 201804)
智能家居系统利用计算机技术和通讯技术将家居中的各类子系统有机结合[1],提供舒适、高效、节能的生活,近年来得到了普遍应用。室内人行为识别,是照明、空调、采暖等设备自动控制的重要依据,对智能家居系统的运行尤为重要。对室内人员定位和动作识别的准确程度,决定了智能家居系统能否正确理解人的行为意图,进而判断各种人员活动场景应该对应的各设备工况组合,以最终完成合理调控和服务决策。
室内人员定位与行为识别的数据采集方法有多种。可以利用摄像头结合图像识别技术对人员进行检测、跟踪及行为识别[2],但易暴露人员隐私;佩戴式无线网络终端配合主机接收器可用于室内人员的精确定位[3],将惯性传感器放置在人体四肢或躯干上,可对人员活动进行监测和分类[4],但这类方法会影响居民正常生活,还可能引起被观察对象的“霍桑效应”[5-6]。被动红外(PIR)传感器是一种典型的非接触式传感器,价格低廉、性能稳定。该仪器能感知监测范围内红外辐射的变化,有人员移动时,仪器输出电压高;无人员或人员静止时,仪器输出电压低。
PIR传感器通常用于判断监测区域内是否存在活动人员,以有人/无人状态作为防盗报警装置[7]与智能照明[8]等系统的触发信号。AI-NAIMI等[9]结合单个PIR传感器与地板压力装置,实现人员识别与活动轨迹跟踪,该系统中PIR传感器单元仅用于增强识别能力;杨丹等[10]则引入PIR传感器阵列,粗略定位人员后,利用惯性传感器测得的加速度信号估计人员移动速度和方向,再以粒子滤波方法融合上述信息,进一步提高定位精度,最终实现人员移动方向估计及基本日常活动识别。以往研究多使用PIR传感器判断室内是否有人员活动,或粗略确定人员位置并配合其他传感器实现跟踪和识别功能,独立使用PIR传感器实现人员定位与行为识别的研究较少。
对于不同的人行为,PIR传感器阵列所测数据的特征规律存在差异,在处理诸如此类的数据量大、变量多且无已知公式的复杂问题时,机器学习方法是一种很好的选择。陈龙[11]建立了人体目标穿过PIR传感器阵列的目标模型,设计出基于红外时域信号特征的前馈(BP)神经网络人体目标识别方法,识别率最高可达92.4%。万柏坤等[12]测量了不同对象、不同速度的人员行走时对应的红外时域电压信号,采用主成分分析(PCA)结合支持向量机(SVM)分类算法进行人员动作识别,准确率在75.31%~85.38%之间。上述研究基于PIR传感器直接采集的模拟量信号,数据在时域上连续,具有模拟信号的一般特性,即其中的真实信号易受噪声干扰且混合之后二者难以分开。相较而言,部分型号的PIR传感器输出离散的二进制码,属于数字信号,抗干扰能力更强。Yang等[13]和Kim等[14]在基于贝叶斯分类算法构建室内人员位置感知系统时,采用数字信号0-1作为PIR传感器的输出值以构建数据集,前者在测试中准确率在87.4%~92.6%之间,后者在不同的步速下,测试所得准确率约在81.0%~91.0%之间。绝大多数结合PIR传感器数据和机器学习方法进行的室内人行为研究,均以人员位置或动作为主要识别对象,忽略了实际场景中二者的关联性,不能实现PIR传感器同时定位室内人员和识别行为类型。
本研究以住宅客厅作为应用场景,选用数字信号输出型PIR传感器阵列,测试并分析人行为的数据特征,借助机器学习算法实现住宅空间人员定位和动作类型识别的功能。
1 人行为数据采集
1.1 数据采集与测试方案
本研究以某4.8 m(长)×3.0 m(宽)×2.7 m(高)的客厅作为实验场所,记录住户自2020年1月至5月中71 d的日常活动,有效数据时长共计3 429 min,前期采集到的2 285 min作为训练数据集,用于模型构建及十折交叉验证,后期的1 144 min作为测试数据集,用于模型的再次验证。将该客厅靠近墙壁、无大型家具的地板区域记为A区、沙发区域记为B区,并将A、B区分别划分3个等距区间,共6个测试区域,如图1所示。
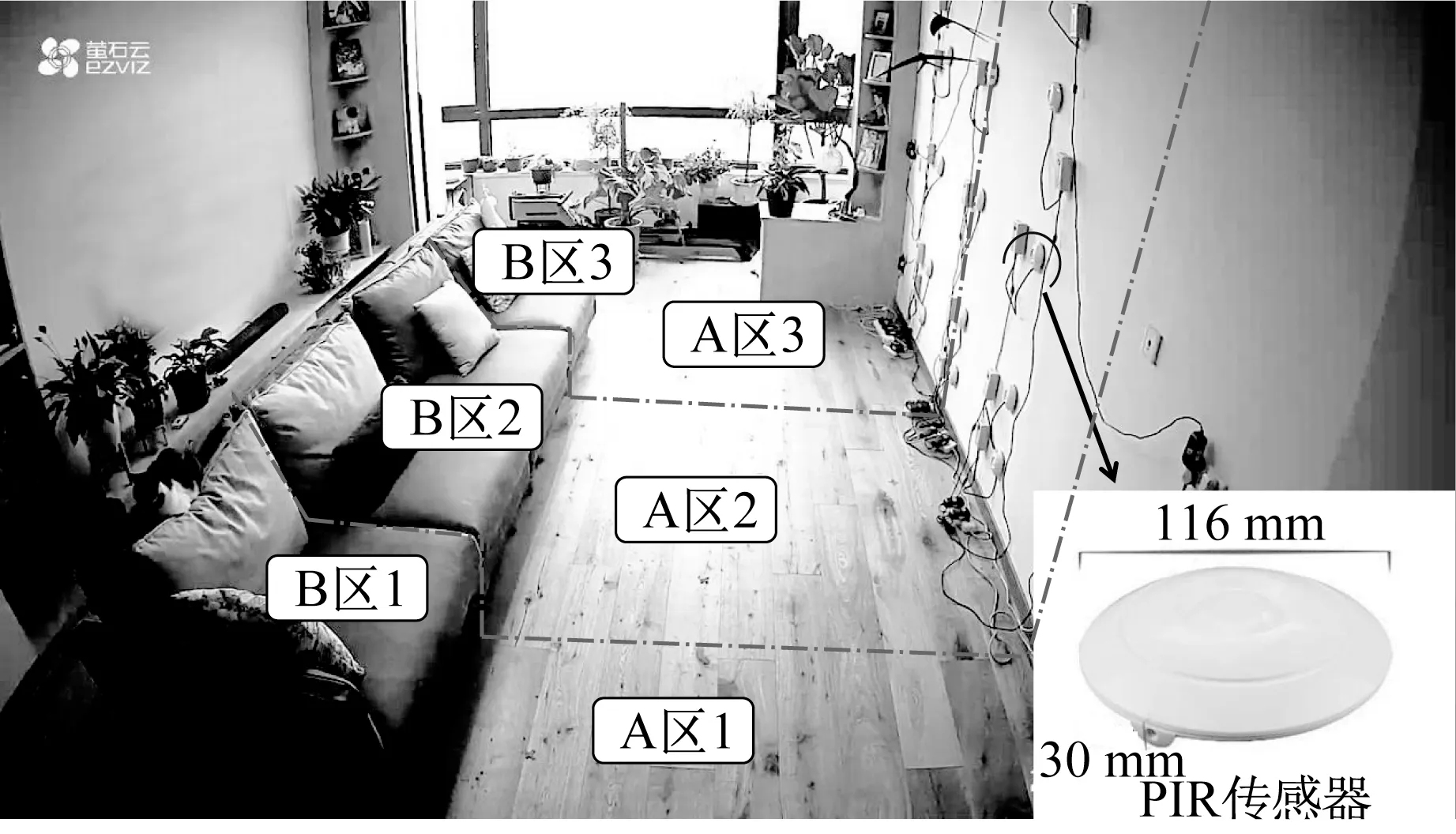
图1 测试区域划分(监控摄像仪视角)Fig.1 Test region partition(view of surveillance camera)
1.2 数据采集设备
选用15台RS-HW-N01型被动红外传感器采集人行为PIR数据集。该仪器每秒记录一次数字信号0/1,自感应到人体活动的瞬时起连续5 s记录高电平“1”。其计数装置可同时实现对每60秒的仪器记录信号进行累加,并输出当前1 min的计数累加值(分钟计数值),如式(1)所示。图2为某分钟内PIR传感器记录的数字信号,期间传感器共检测到4次人员移动,输出的分钟计数值为20。
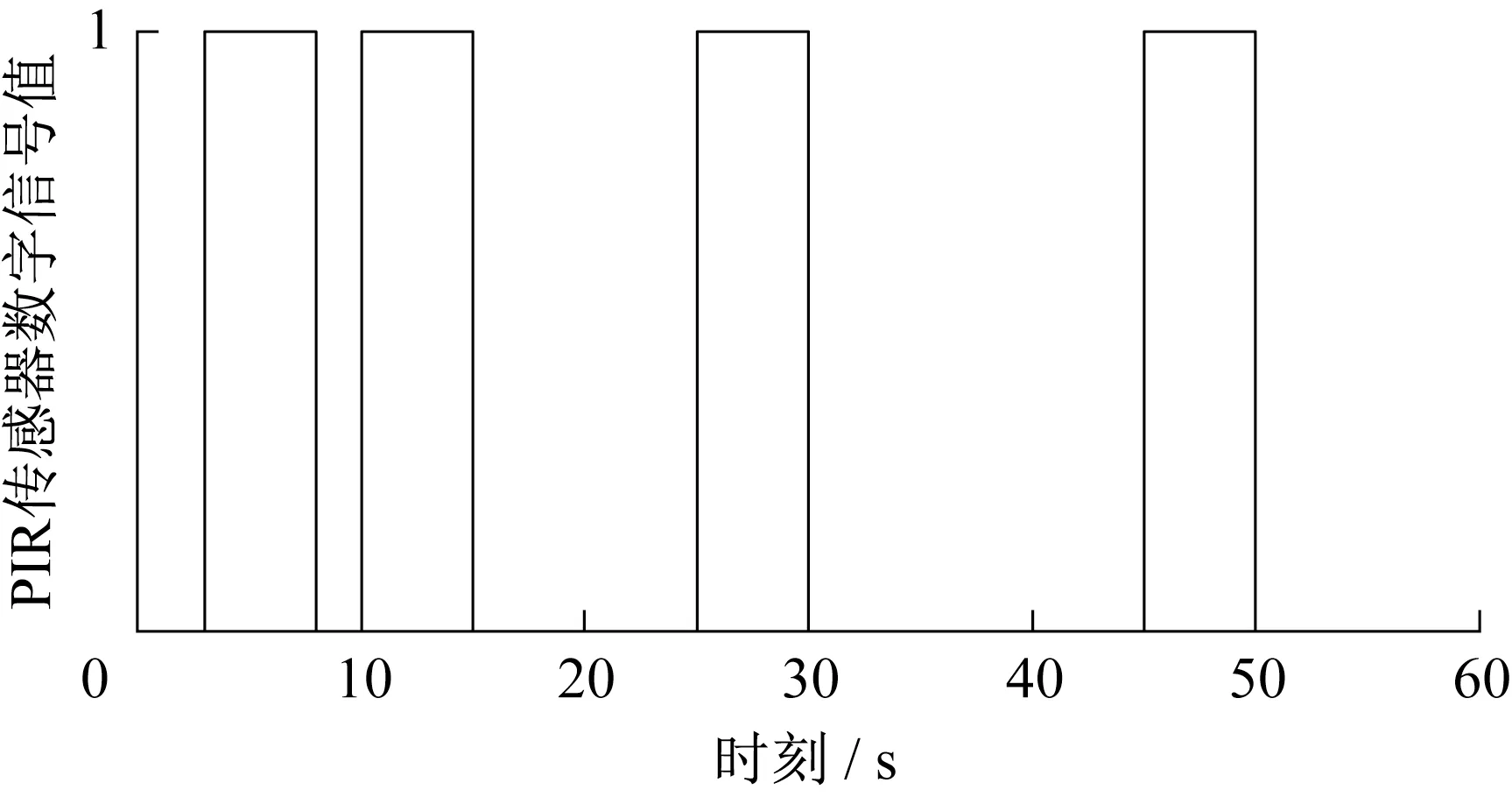
图2 PIR传感器计数示例Fig.2 Example of count of PIR sensor

式中:x i为PIR传感器在第i秒记录的数字信号;X为PIR传感器的分钟计数值。
采用1台监控摄像仪(对角视场角为180°,红外照射距离为7.5 m),记录人员的实际位置与动作。依据测试区域的对称性,在客厅墙壁的左半区域布置由15台PIR传感器组成的阵列,如图3所示,从左到右依次为第Ⅰ列(No.1~No.5)、第Ⅱ列(No.6~No.10)、第Ⅲ列(No.11~No.15),每列相隔0.8 m;在高度上,PIR自下而上分别距地0.3、0.6、1.2、1.8、2.4 m。监控摄像仪的监控范围能覆盖全体测试区域,用于获取准确的人员位置和动作信息。
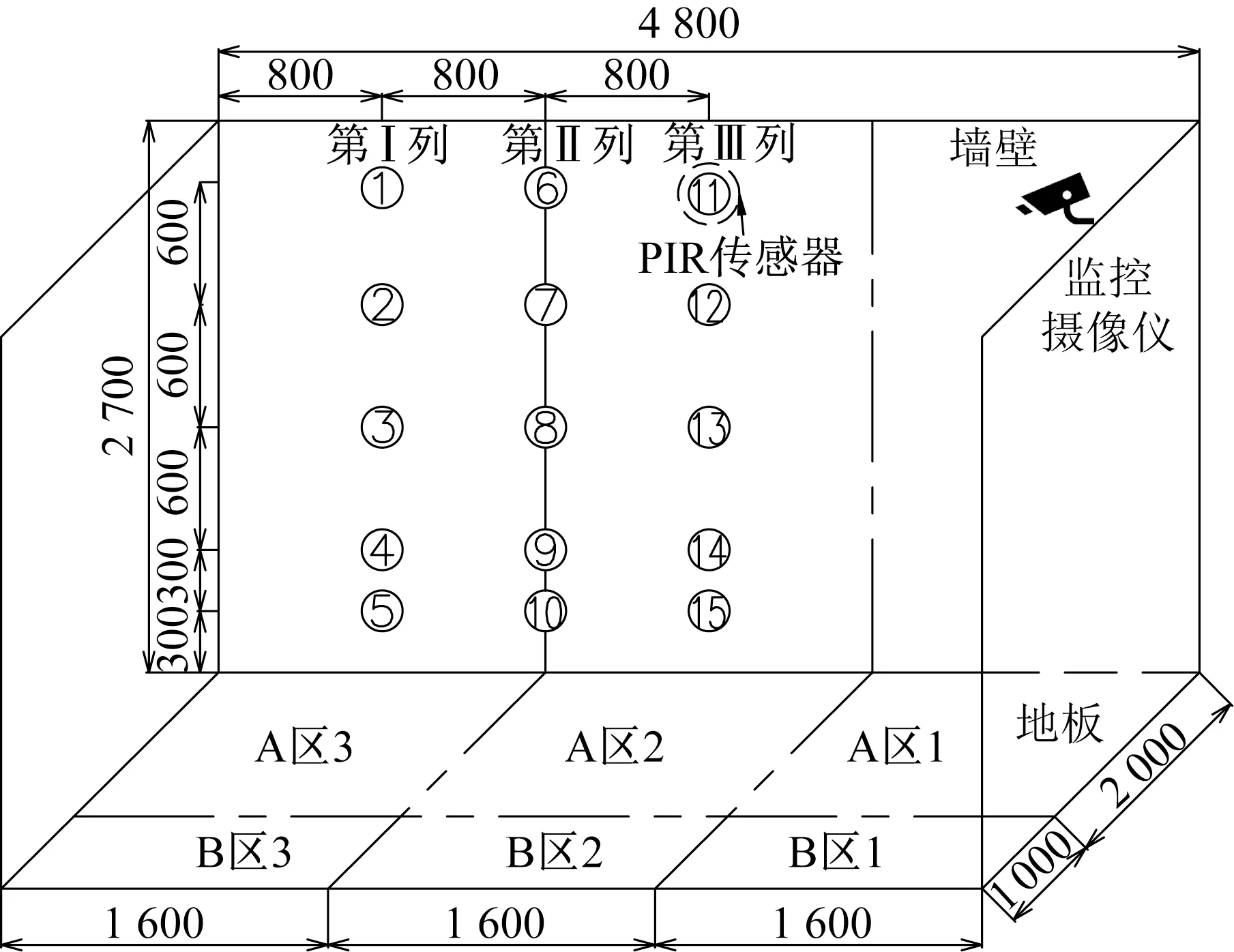
图3 PIR传感器布置阵列(单位:mm)Fig.3 PIR sensor array(unit:mm)
2 人员不同位置及动作的PIR数据特征
2.1 人员不同位置下的PIR数据特征
以每30分钟人员在某个区域做特定动作的PIR传感器分钟计数值波形图为例,列举6种典型活动,共计180 min。为便于观察,选取6台仪器(No.1、No.3、No.6、No.8、No.11、No.13)的测试结果,如图4所示。对比图4中A区1、A区2和A区3的“走动”动作,PIR传感器波形图随人员位置变化呈现出不一样的特征,对单台PIR传感器表现为“距离越近,计数越多”。此外,距地2.4 m的No.1、No.6、No.11传感器分钟计数值,比距地1.2 m的No.3、No.8、No.13传感器的少,说明高于人体高度的传感器对动作的敏感程度不及人员高度处的仪器。
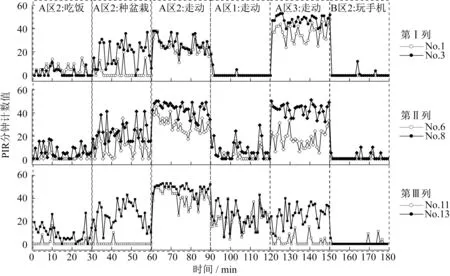
图4 典型活动PIR传感器分钟计数值波形图Fig.4 Oscillogram of PIR sensors’cumulative count value of each minute of typical activities
对于不同列的PIR传感器而言,“走动”动作发生于A区1时,由于距PIR传感器阵列较远,引起阵列总体的响应较微弱,又以距离动作发生位置最远的第Ⅰ列为最弱,第Ⅱ列次之,第Ⅲ列稍强,当“走动”动作发生区域为A区2、A区3时,计数特征同样表现为与“走动”动作发生的区域相对距离最近、角度最小的PIR仪器列响应最强,随相对距离和相对角度的增大,PIR仪器列响应变弱,计数均值和峰值有所下降。
图5为在A区1、A区2、A区3发生“走动”动作时No.3仪器的计数值箱型图,3种位置下,分钟计数值均值分别为0.47、27.20、47.53,经K-W检验,数据样本服从的概率分布具有统计学差异,PIR传感器能明显反映出人员位置差异。
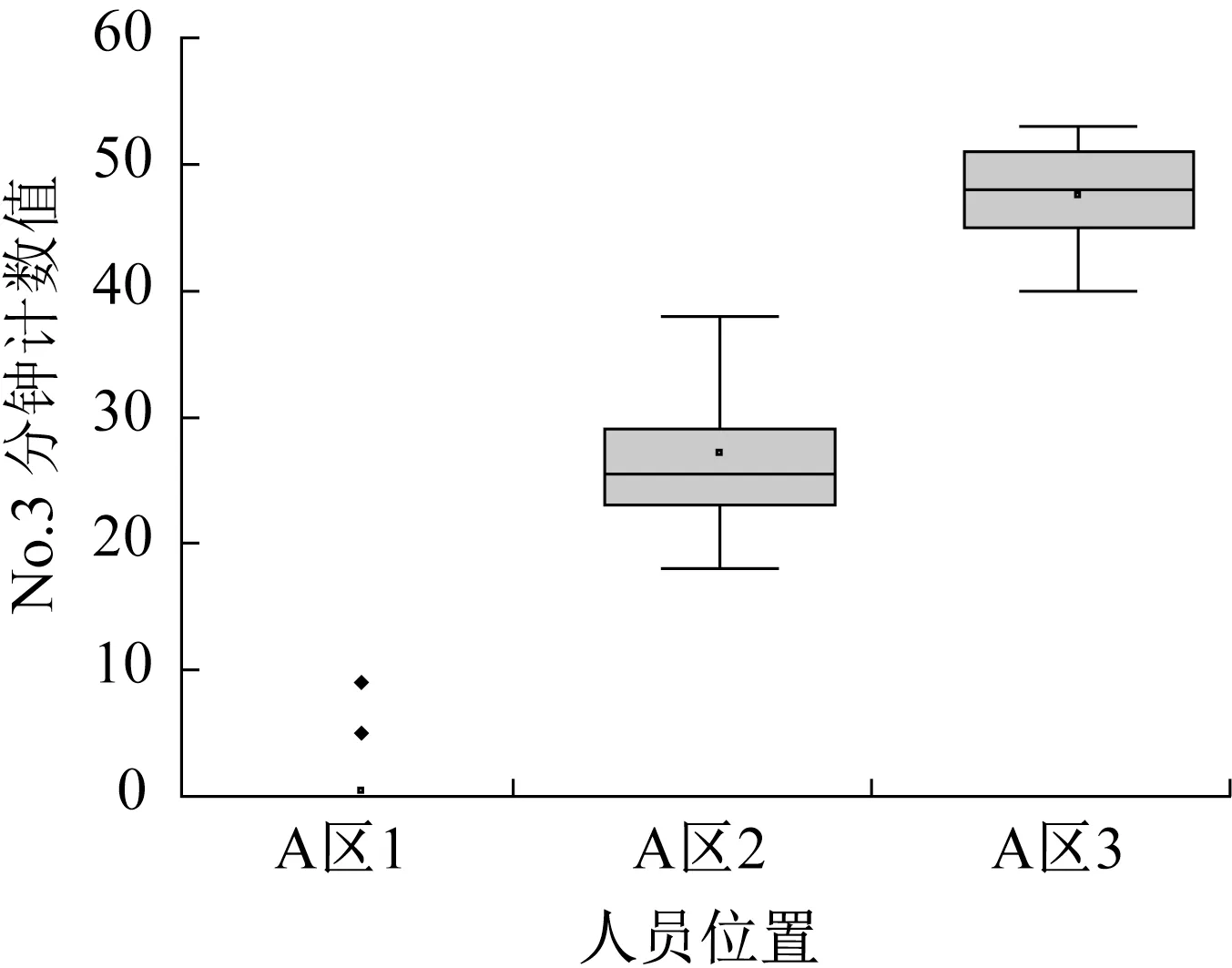
图5 人在不同区域走动时No.3仪器计数特征箱型图Fig.5 Box chart of counting characteristics of PIR No.3 when occupant walking in different regions
2.2 人员不同动作强度下的PIR数据特征
对比图4中发生于A区2的3类动作——“吃饭”“种盆栽”和“走动”,人员位置相同时,不同的动作所引起的PIR传感器波形图也有明显的差异,随动作强度提高,仪器分钟计数值上升,计数波形图中峰值、均值增大。此外,对均发生于A区2的3类动作,大多数情况下位于2.4 m的仪器No.1、No.6、No.11的计数值小于位于1.2 m的No.3、No.8、No.13,证明在不同动作强度下,仍具有2.1中所述“高于人体高度的传感器对动作的敏感程度不及人员高度处的仪器”这一特征。
图6为No.3仪器在A区2的“吃饭”“种盆栽”“走动”动作下的计数值箱型图,3种动作下,分钟计数值均值分别为2.67、13.67、27.20,经K-W检验,数据样本服从的概率分布具有统计学差异。
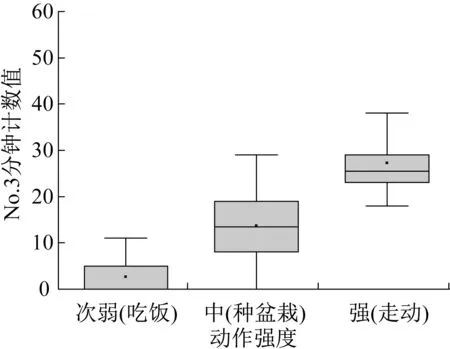
图6 人在A区2不同动作下No.3仪器计数特征箱型图Fig.6 Box chart of counting characteristics of PIR No.3 of different activities in Region A2
2.3 基于人员位置和动作强度的活动划分
完成各类动作所需人体四肢的参与程度、动作幅度不同,按照动作特性和波形图特征,本研究将动作强度划分为由强及弱的4类——A区包含以“走动”动作为代表的强动作,以“种盆栽”为代表的中动作,以“吃饭”为代表的次弱动作;B区以“玩手机”为代表的动作,较A区的“吃饭”动作具有肢体参与程度低、幅度小的特点,引起PIR传感器响应微弱,输出信号多为低电平,相应形成的波形图中数据以“0”为主,峰值、均值更低,将其归为弱动作。
如表1所示,本研究结合人员位置和动作强度,将人员在客厅的日常行为归纳为12种活动:以“A/B 1/2/3-1/2/3/4”的形式对每种活动编号,其中字母和第一个数字表征活动中的人员位置,第二个数字表征活动中的动作强度,由强及弱分别为1、2、3、4,例如编号“A1-1”表示“发生在A区1的强活动”。

表1 活动类别及编号Tab.1 Activity types and codes
3 基于机器学习的人员位置及动作识别模型建立
3.1 建模方法
本研究建立人员位置及动作识别模型的流程如图7所示。以时长2 285 min的训练数据集经十折交叉验证(测试1)构建人员位置及动作识别模型,时长1 144 min的测试数据集中同样包含2.3中所述12种活动,用于对基于训练集建立的模型进行验证(测试2)。
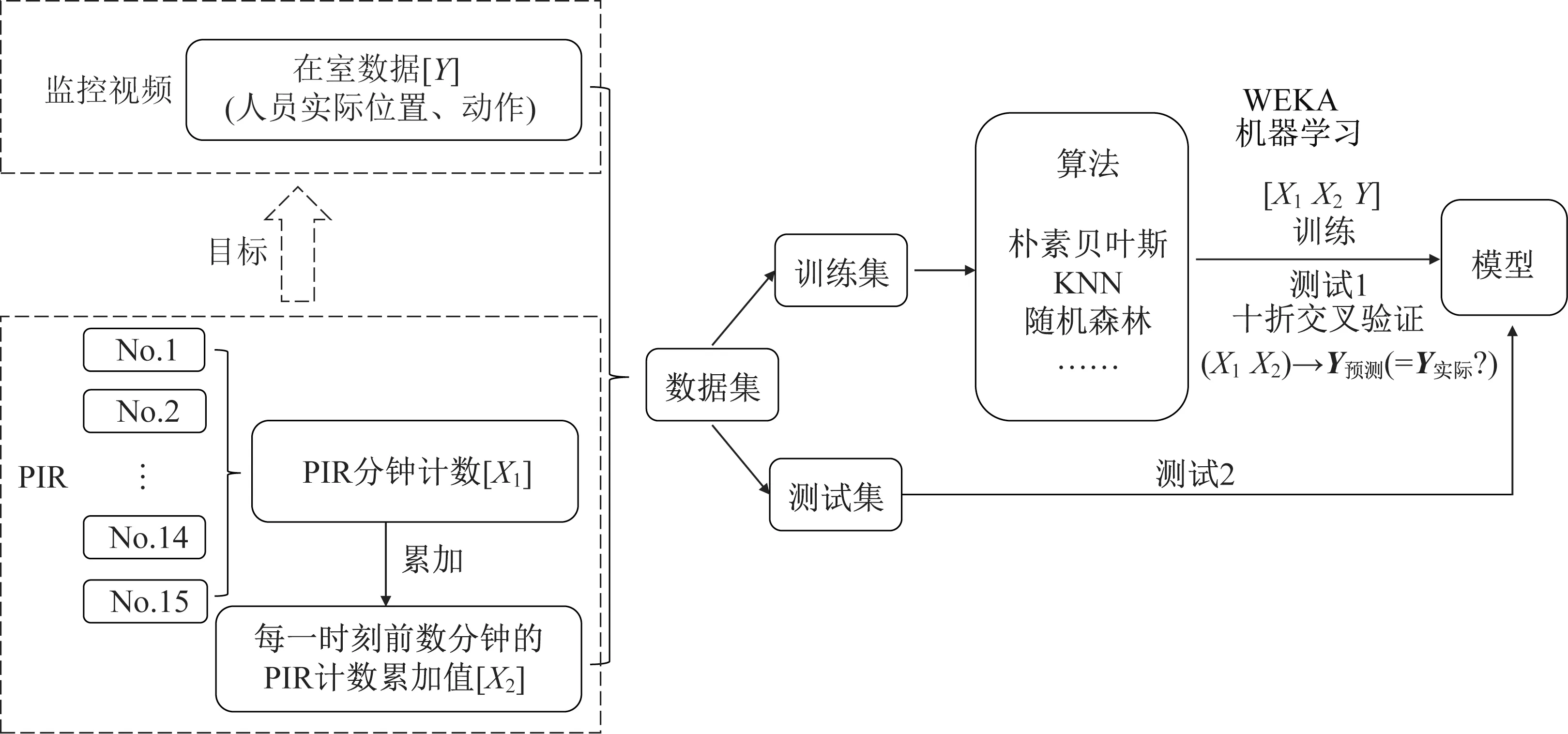
图7 基于PIR数据机器学习的人行为识别模型构建流程Fig.7 Construction process of machine learning and PIR-based occupant behavior recognition model
使 用WEKA 3.8.4(Waikato environment for knowledge analysis)构建人员位置及动作识别模型,该平台集合了大量机器学习算法,可实现数据预处理、分类、回归、聚类、关联规则以及在交互式界面上的可视化。
模型构建方法经比选后以随机森林(random forest)算法为主,对几种常用的算法,如朴素贝叶斯(naïve Bayes)、逻辑回归(logistic)、支持向量机(SVM)、k近邻(KNN)、决策树等,WEKA3.8.4进行了优化及重命名,本研究对应采用朴素贝叶斯、逻辑回归、序列最小优化SMO、IBk、J48分类器,利用同一训练集构建模型,并综合使用准确率、F测度、Kappa系数、AUC值衡量模型性能[15-16],其中Kappa系数取值范围为-1~1,其余为0~1,上述评价指标越接近1,模型性能越好。
3.2 输入特征优化及模型建立
用于机器学习的数据集包含人员活动编号和PIR分钟计数值,针对训练数据集,采用3.1中所述的多种机器学习算法构建分类器模型,识别准确率结果如表2所示,各类算法下模型整体准确率均较差,彼此之间差别不大,但不同强度动作的识别准确率均存在显著差异。各算法均呈现出强动作识别准确度较高,识别率随动作强度减弱而降低,弱动作识别准确率较差的问题。
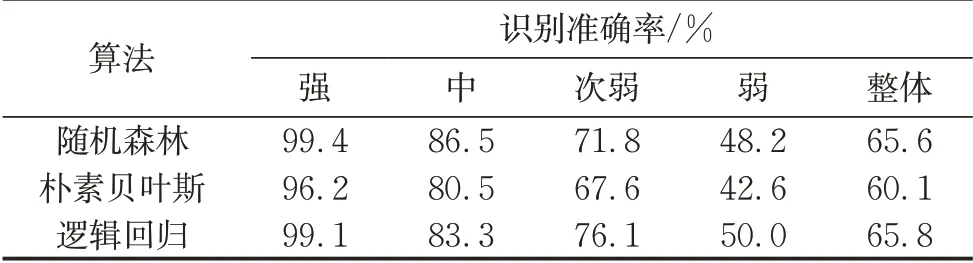
表2 不同机器学习算法对各强度动作的识别准确率Tab.2 Recognition accuracy of various action intensities of several machine learning algorithms
对于人员位置的识别,模型也存在失误,如表3所示,仅存在弱动作的B区识别准确率最低。B区(尤其是B区1)与传感器阵列之间较远的距离,以及弱动作的强度,二者共同导致了PIR传感器的微弱响应。于是,在PIR传感器数据特征中,长时间输出低电平信号,即连续为“0”,成为B区弱动作的重要标识。但机器学习分类算法只离散处理PIR传感器分钟计数值,不考虑时间序列前后的信息关联,对其辨别尤为不利,甚至出现以下问题:①对非“0”值产生误判,认为其属于A区的中度动作;②分区界定模糊,由于B区1最远,记录的“0”值最多,因此当计数同样为“0”时,分类器更倾向于将该时刻的人员活动归类为“B1-4”,而非实际的“B2-4”或“B3-4”。
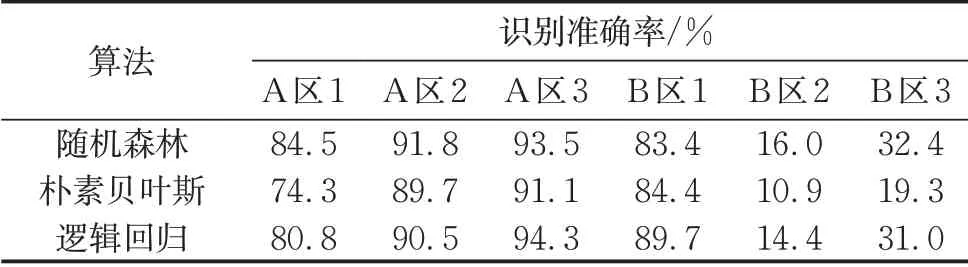
表3 不同机器学习算法对人员位置的识别准确率Tab.3 Recognition accuracy of various regions of several machine learning algorithms
考虑动作在时序上的关联,引入之前一段时间内的PIR计数对当前时刻产生的反馈,将每一时刻前数分钟的PIR计数进行累加,在模型的输入参数中对每一台传感器均新增一列特征值。图8为No.3仪器“B2-4”(B区2,弱动作)的计数值按某时刻向前1、10和30 min累加作为新增特征值的计数波形图,图形显示,累加时长不同,人员动作对数据集产生影响的时效相应具有差别,以前30 min计数累加值波形图为例,某时刻数值与之前的30组数据相关,可以和长时间无人状态相区分,同时由于该量值显著小于中、强动作的新增特征值,理论上对于动作的分类也几乎不会产生混淆,因而通过引入计数累加值的变量有可能可以增加算法的识别准确率。
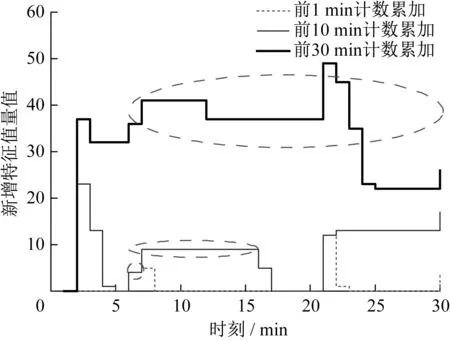
图8 活动“B2-4”下PIR No.3新增特征值波形图Fig.8 Oscillogram of the additional feature of PIR NO.3 of Activity B2-4
在多种机器学习算法下,选取向前1 min至60 min内的8个累加时间分别进行建模,以探究最优累加时长和机器学习算法的组合,各模型性能指标如图9所示,由于包含了前序时刻的PIR计数信息,作为新增特征的累加值对模型准确率体现出明显的提升作用,累加时间从1 min至30 min,各算法的准确率单调上升,累加时间超过30 min时,对部分模型准确率的提高效果不明显。随机森林算法始终比其他算法具有更高的准确率,F测度、Kappa值与模型准确率的结果一致。累加时长在5 min及以上时,随机森林分类模型的AUC值高于其他模型,其值≥0.98,模型识别效果好。
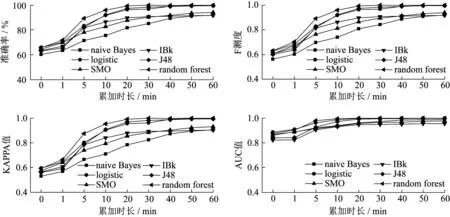
图9 增加不同累加时长特征值输入项对机器学习预测性能的影响Fig.9 Effect of additional features with different cumulative times on machine learning performance(Test 1)
选取随机森林算法构建的人员位置与动作识别模型,该算法自累加时长取30 min起,模型准确率趋于稳定,考虑到数据处理的复杂程度及模型由输入至输出的时效需求,最终将30 min作为累加时长。使用训练集数据按十折交叉验证进行机器学习模型训练(测试1),对表1中所述人员位置及动作强度的12种状态进行识别,准确率列于表4,除B1-4活动在辨别时由于细微的位置失误,准确率为99.6%外,其余均为100%。相较表2无累加情况下建立的随机森林分类模型,各位置、动作强度的识别准确率均有提升。

表4 基于随机森林算法的模型分类准确率(测试1)Tab.4 Recognition accuracy of the model based on Random Forest algorithm(Test 1)
在随机森林分类模型中,以每个特征对最终预测做出贡献的样本比例衡量该特征的重要性。如图10所示,阵列中各PIR传感器对于模型构建的贡献程度接近,且对大多数仪器而言,前30 min累加计数值的特征重要性超过动作发生时刻计数值,该结果同时验证了通过累加提高模型准确率的合理性。
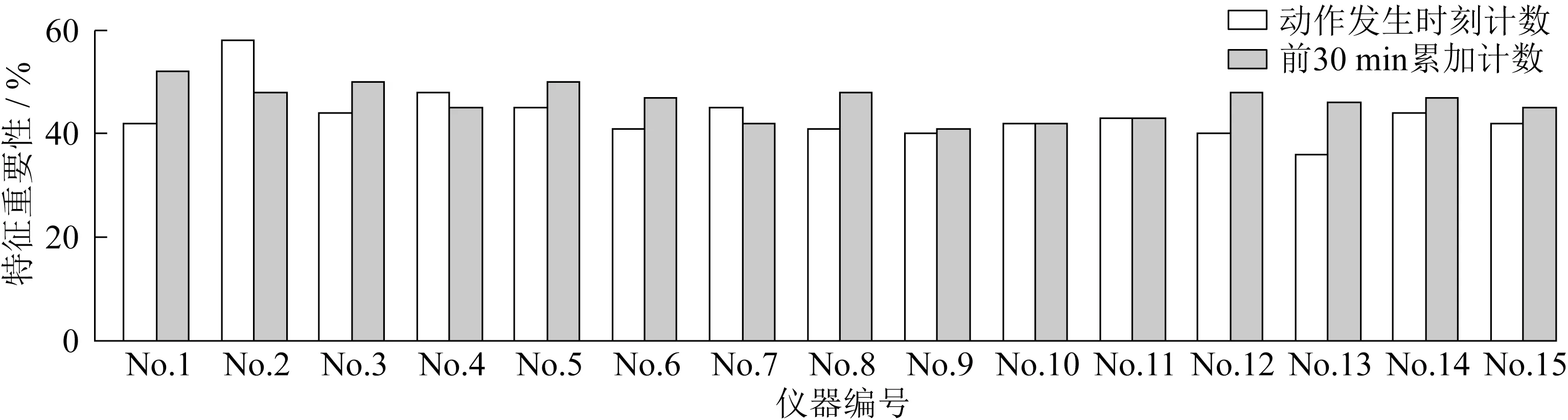
图10 模型中各PIR传感器计数值的特征重要性Fig.10 Importance of features of each PIR sensor in the model
3.3 模型验证
利用3.1中所述测试数据集对建立的随机森林分类模型进行验证(测试2),识别效果示例如图11所示,模型性能指标参数列于表5,针对12种活动的分类准确率列于表6。由于人行为的随机性,后期采集的测试数据集可能还存在部分训练数据集未观测到的数据特征,导致相较于对训练数据集进行的测试1,测试2验证的分类准确率略有下降,但其准确率仍维持在88.3%,综合F测度、AUC值,可以认为模型具有较高的分类准确性,同时Kappa系数也显示出预测结果与实际情况之间的高度一致性,证明了本文所建立的人员位置和动作识别模型具备一定的通用性。

表5 基于随机森林算法的分类器模型性能指标(测试2)Tab.5 Performance indices of the model based on random forest algorithm(Test 2)
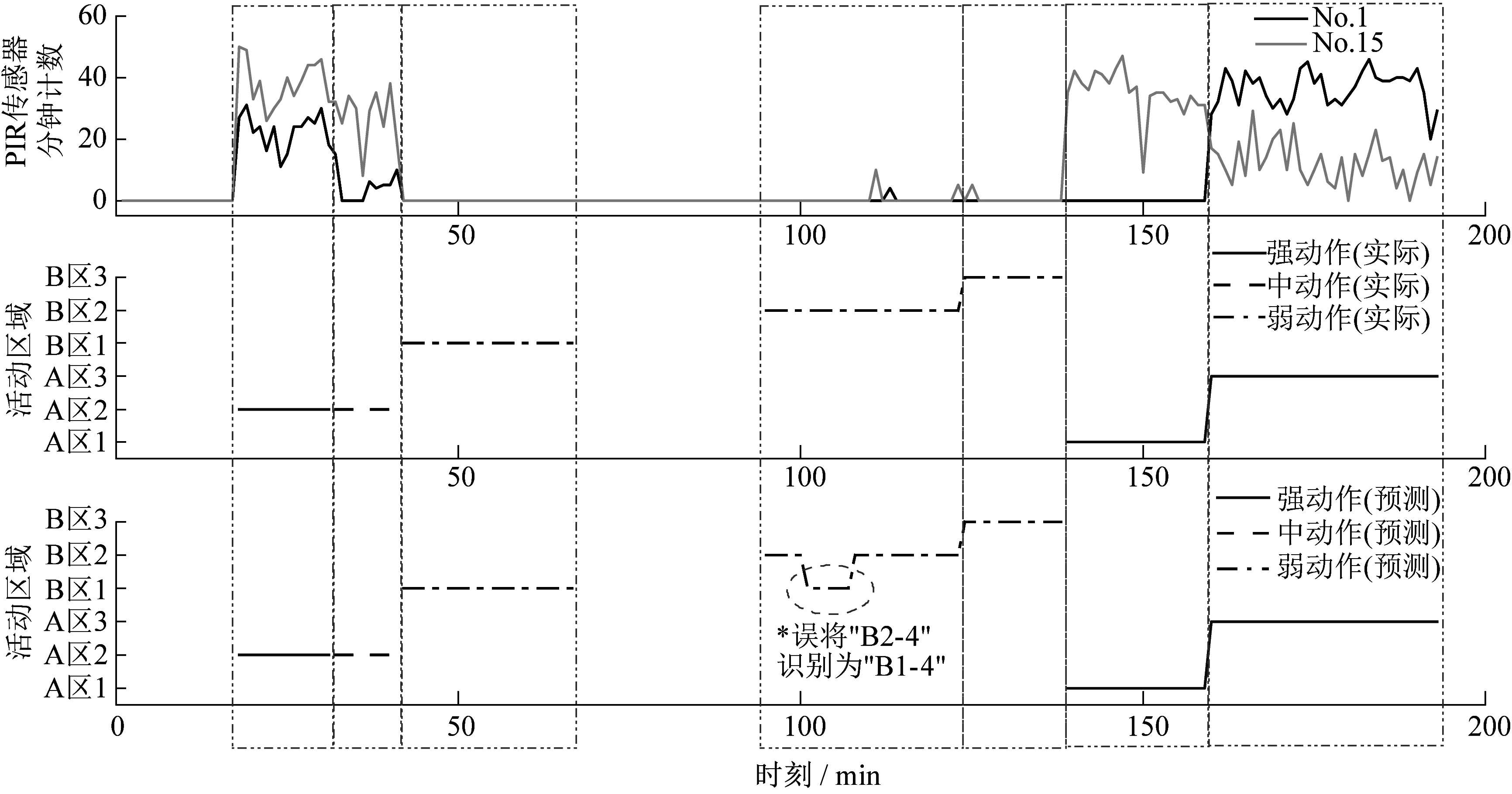
图11 基于随机森林算法的分类器模型识别效果示例Fig.11 Example of the recognition result of the model based on random forest algorithm

表6 测试集验证基于随机森林算法的模型分类准确率(测试2)Tab.6 Recognition accuracy validated by the test set of the model based on random forest algorithm(Test 2)
对测试数据集中各类活动的分类准确率表明,该模型对发生在A区的强、中、次弱动作的辨别比较精准,对发生在B区的弱动作辨别能力稍弱。针对测试数据集,模型的预测准确率不及3.2中所述利用训练数据集十折交叉验证的结果,分类误差的来源主要是人员位置,具体而言,对A区1、A区2内活动的识别准确率为100%,优于A区3;对B区1内活动的识别准确率为93.4%,优于B区2、B区3。若忽略家居布置情况,沿纵向不区分地板和沙发区域,即合并A区与B区,仅沿横向划分3个等距区间,即A/B区1、A/B区2和A/B区3(后文简称区1、区2、区3),可以看出,区1内活动的识别,相较于区2、区3,准确率更高,鲁棒性更好。其原因在于,区1距仪器阵列更远,该位置状态下人员活动对应的PIR传感器计数特征,与其他两种位置状态相对比,差异更为显著,从而使得模型建立时更能提取该区域内的活动对应的数据特征,对其识别更加准确。同时说明,在利用PIR传感器阵列进行人员位置与动作识别的研究中,与人员活动区域距离差异明显的PIR传感器的存在,能形成更具特征的响应信号,利于模型准确率的提高,对于PIR传感器阵列的高效布置形式的深化研究,也应从该角度予以考虑。
综上,在本研究的PIR阵列布置下,以仪器分钟计数值及其前30 min计数累加值作为输入,基于随机森林算法构建的位置及动作识别模型,可以实现良好的人员位置与动作识别效果。该研究结果为PIR传感器在智能家居系统中的深化利用提供了可能性,如作为室内空调装置的风向、风量调节依据等,同时,其有助于构建室内人员位移模型,提升建筑能耗模拟的准确性。
4 结论
本文基于PIR传感器阵列采集的住宅建筑人行为数据,引入前序时刻仪器计数累加值作为新的输入参数以增强预测准确度,选取随机森林算法建立了人员位置及动作识别模型,通过对不同区域和不同强度的12种活动进行分类,验证了模型的有效性和通用性,并形成以下结论:
(1)住宅建筑中,数字信号输出型PIR传感器阵列所采集到的信号能够反映不同位置以及不同强度动作的人行为的差异。不同位置的相同动作可引起同一台PIR传感器计数特征的显著性差异,人员位置与仪器列的相对距离越远、角度越大,响应越微弱;同一位置的不同动作引起的PIR传感器响应程度,随动作强度增大而加强。
(2)机器学习算法对人员位置及动作的识别能力随动作强度增强而提高,对弱动作的识别准确性欠佳;与PIR传感器阵列具有明显距离差异的活动区域,形成的响应信号数据特征更显著,识别准确率更高。
(3)对前序时刻的PIR计数信息进行累加,作为新增特征变量,对模型准确率有明显的提升作用,累加时间从1 min至30 min,准确率单调上升,超过30 min时,对部分模型准确率的提高效果不明显。以随机森林算法为例,当引入前30 min累加值时,模型整体准确率由65.6%提高至99.9%,各位置、动作强度的识别准确率均有提升。
(4)随机森林分类算法对本研究中的人员位置及动作数据集能实现较为准确的分类,且优于其他分类算法。训练数据十折交叉验证下模型准确率达99.9%;测试数据验证下的准确率为88.3%。
作者贡献声明:
周 翔:论文撰写,整体指导。
赵 婷:论文撰写,模型构建。
张静思:思路设计,数据采集,论文撰写,整体指导。
王纪隆:数据采集,模型构建。
张心悦:数据采集,模型构建。
猜你喜欢
煤气与热力(2022年2期)2022-03-09
中学生数理化·高一版(2021年11期)2021-09-05
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
小学生学习指导(低年级)(2020年4期)2020-06-02
数学大王·低年级(2019年8期)2019-08-27