
纯电动牵引车ESC试验侧翻稳定性研究分析
2022-03-23 18:59张文颜为光
专用汽车 2022年3期
张文 颜为光


摘要:针对某款纯电动牵引车ESC性能试验时轮胎出现离地现象,与该车型燃油版本的试验结果进行了对比分析,建立了力学模型对车辆侧翻和侧滑的发生条件进行分析。结果表明,牵引车在紧急转向时发生侧翻的可能性比发生侧滑的可能性更大,纯电动牵引车相比于燃油版车型发生侧翻的极限车速更低。研究结果为牵引车ESC系统设计提供了參考。
关键词:纯电动牵引车;ESC系统;侧翻;极限车速
中图分类号:U469.51
收稿日期:2021-12-12
DOI:10.19999/j.cnki.1004-0226.2022.03.010
1前言
随着汽车的日益普及,汽车渐渐成为生活中不可缺少的一部分。汽车不仅要满足日常出行的需求,还要能够为出行保障安全。汽车行驶的安全性一直都是汽车生产厂家研究的重点课题。所有车辆事故中,车辆侧翻和侧滑事故导致的车内乘员死亡比例高达39%,为了提升汽车行驶的侧向稳定性,博世公司在1995年发布了新型主动安全系统,即电子稳定性程序(ESP)。根据美国公路交通安全管理局(NHTSA)对美国国内汽车事故的调查报告,发现电子稳定性控制系统(ESC),能够减少28%~36%的侧滑和侧翻事故。因此,如何提升车辆电子稳定性控制系统(ESC)的安全性和可靠性,已经成汽车行业研究的重点。
2ESC控制原理及试验方法介绍
2.1ESC控制原理
ESC由车载控制单元(ECU)、液压执行机构以及车辆状态传感器等部件组成。在车辆转向时,ECU通过传感器采集驾驶员操纵车辆的信息(方向盘转动角度、加速踏板开度以及制动系油压)和车辆运动时的车身姿态信息(横摆角速度和侧向加速度),来分析驾驶员期望的车辆行驶状态和估算转向时实际的车辆行驶状态;对比两种行驶状态之间的偏差,若超过ESC给定的偏差范围,
ESC按照设定的控制策略,对各个车轮的制动力以及发动机功率进行调节,通过差动制动产生的横摆力矩来控制车辆转向时的运动状态,使车辆运动轨迹尽可能与期望轨迹重合),从而保障车辆在超车、避障、转弯等工况下的行驶稳定性和安全性。
2.2ESC试验方法
ESC的主要功能就是保证车辆的路径跟踪性和侧倾稳定性。对ESC功能的测试方法分为两类:a.测试ESC对车辆行驶路径的控制,即车辆行驶路径控制类;b.测试ESC对车辆车身姿态控制,即方向盘转角控制类。
车辆行驶路径控制类试验项目有单移线试验、双移线试验、定圆试验、FMVSS136的J-turn试验、弯道加速试验、高速弯道制动试验、弯道变道试验、转向半径减少试验等。这类试验的测试方法一般是,固定车辆行驶路径,逐次提高试验车速,检验ESC系统能否在车辆高速转向时保证车辆行驶轨迹的稳定性。通过驾驶员操纵车辆的主观感受确定车辆驾驶极限,驾驶员对比ESC开启和关闭模式下车辆行驶状态,来评价ESC的性能。这类试验对场地和设备要求相对较低,但对驾驶员驾驶技术要求高、重复性差。
方向盘转角控制类试验项目包括转向盘脉冲输入、阶跃输入(灯-转向)、“鱼钩”试验、梯形输入、调幅梯形输入、正弦输入、半正弦输入、正弦停滞、正弦调频调幅试验、闭合转向试验、线性停滞试验、慢增量转向、正弦扫描等试验项目。这类试验的测试方法一般是,固定试验车速,逐次提高方向盘转角幅度,检验车辆在行驶时大幅度转动方向盘,ESC系统能否保证车辆的侧倾稳定性。这类试验对方向盘的转角、转速控制精度要求极高,试验时借助高性能的转向机器人转动方向盘,通过试验数据定量评价ESC的性能,试验重复性好,但对场地和设备要求相对较高,试验流程相对复杂。
2.3ESC性能要求
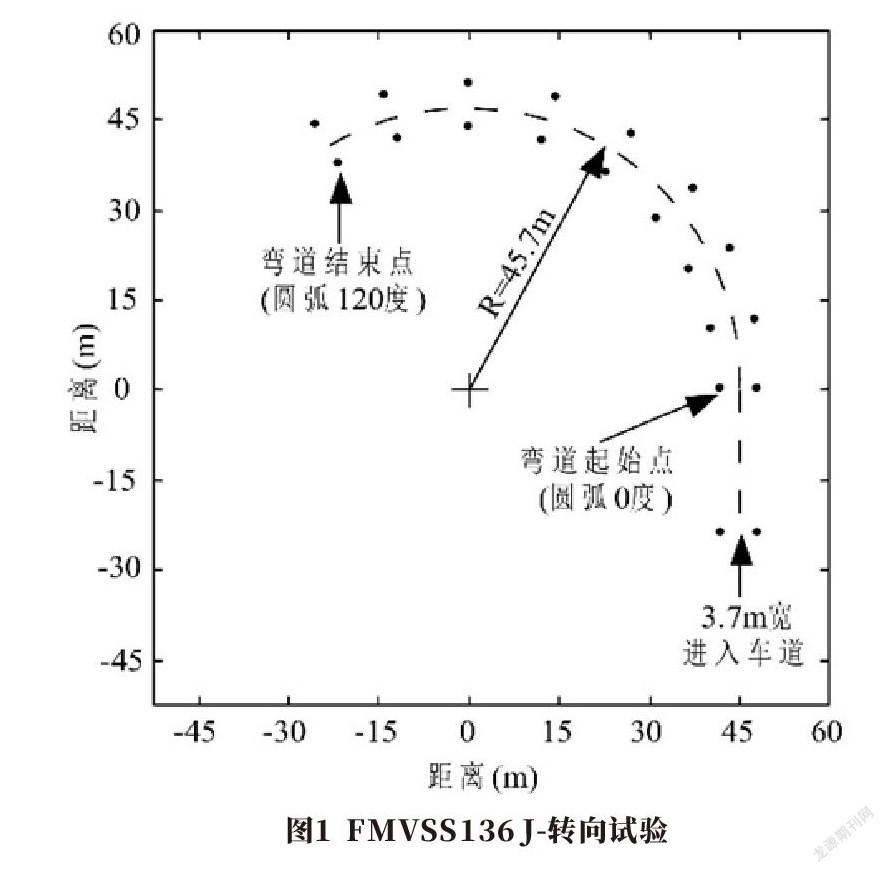
2015年10月FMVSS136《重型车电子稳定控制系统》标准正式发布),采用的试验方法为转向试验,试验路径是一个半径为150ft(45.7m)、角度为120的圆弧,如图1所示。评价ESC性能的指标为发动机扭矩和通过车速。发动机扭矩控制要求为:车辆进入弯道后,至少有连续0.5s的时间,发动机输出扭矩与驾驶员需求扭矩相比至少降低10%,且车辆必须位于车道线内。防侧翻控制要求为:车辆进入弯道后3s时刻,车速不应超过47km/h,车辆进入弯道后4s时刻,车速不应超过45km/h,且车辆必须位于车道线内。
3ESC试验与对比
3.1ESC试验设备及试验条件
ESC主要测试设备有ABDSR150转向机器人、DEWEsoftX3数据采集系统、OxTSRT3000高精度惯性导航和RTbasez基站,如图2所示。
ABDSR150转向机器人用于设定ESC试验路径,并按照设定的路径控制试验车辆方向盘的转动,保证试验的重复性。DEWEsoftX3数据采集系统用于实时采集车辆、高精度惯性导航和制动气室压力等的信息。OxTSRT3000高精度惯性导航用于测量试验车辆的车速、侧向加速度、横摆角速度等参数。RTbase基站用于增加高精度惯性导航的卫星数,提升其测量精度。
测试场地要求为直径300的动态广场,路面峰值附着系数0.92,单一坡度且坡度不大于1%。
试验车辆要求配置防翻架,制动气室安装气压传感器,并在满载状态下进行试验。
3.2ESC试验对比
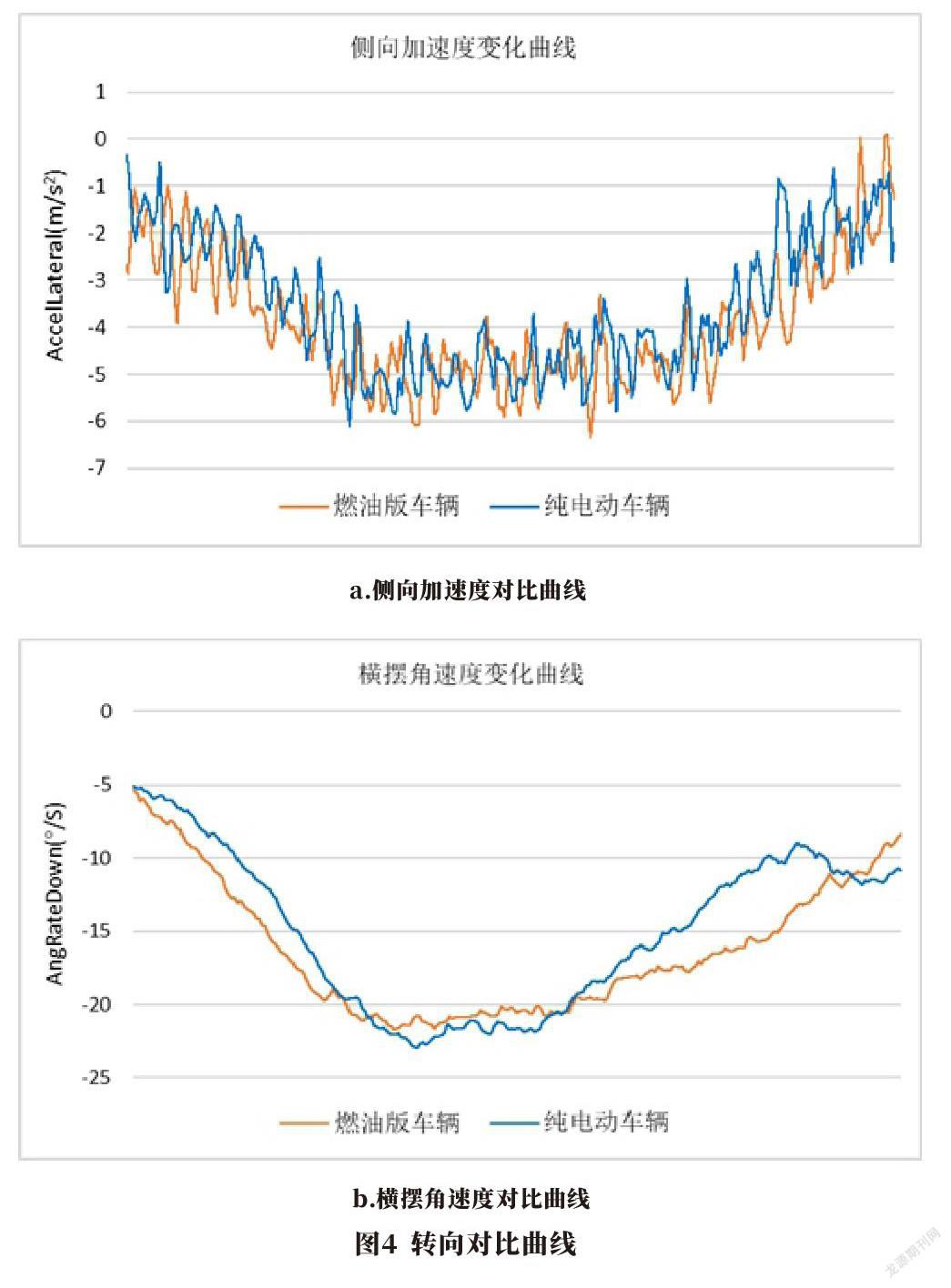
按照FMVSS136标准,对纯电动牵引汽车进行防侧翻控制能力测试(图3)。试验车辆以56km/h的速度进入左转弯道后(逆时针方向),左后轮组离开地面,车辆侧倾明显。而燃油版车型在相同的试验条件下未出现这种情况。
对比该车型燃油版本的试验,两车在试验中的行驶路径和转向速度均一致。选择两车入弯速度相同的试验数据进行对比(图4),在试验过程中,两车的侧向加速度和横摆角速度变化趋势一致,从入弯后开始增大,到ESC系统起作用后减小,且两车的侧向加速度在数值上基本相等,而纯电动车型相比于燃油版车型,横摆角速度变化幅度更大,变化速率更快。
3.3车辆结构对比
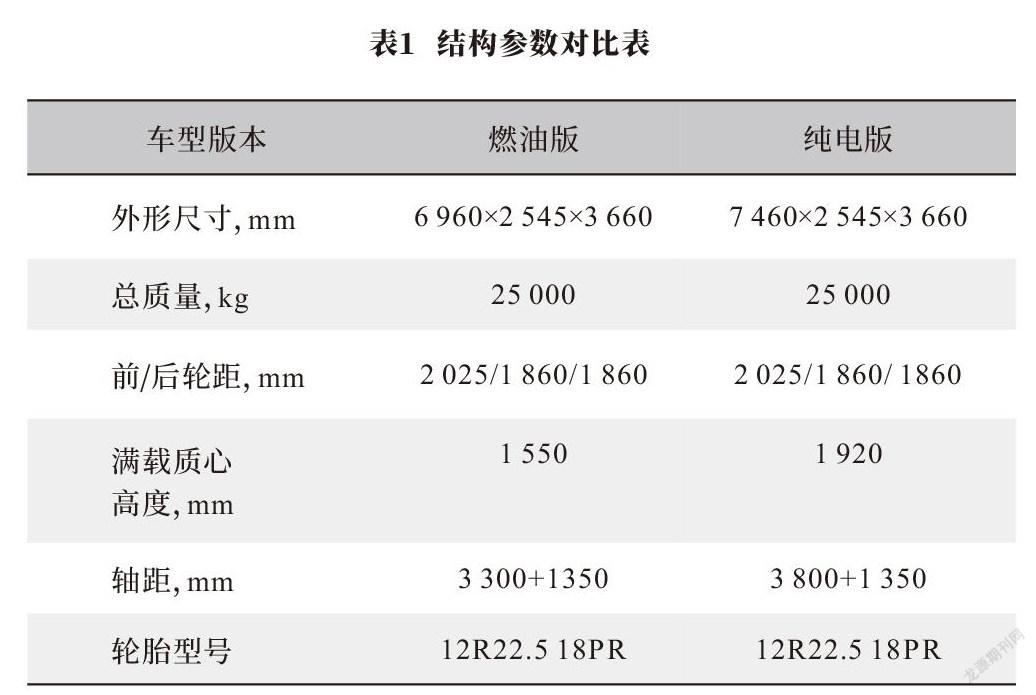
对比该车型纯电动版本和燃油版本的车身结构参数(表1)。纯电动车型车身长度和轴距相对更长,满载质心高度更高。
在对两车的实车结构测量和对比时发现,纯电动车型增加了第一二轴的轴距,这部分空间用于安装动力电池模组。动力电池模组安装在驾驶室后部的车架上,导致车辆质心增高。
4试验车辆侧翻与侧滑分析
本节对纯电动车型试验时,车身出现的明显侧倾的原因和试验过程中存在的风险进行分析。
4.1侧翻分析
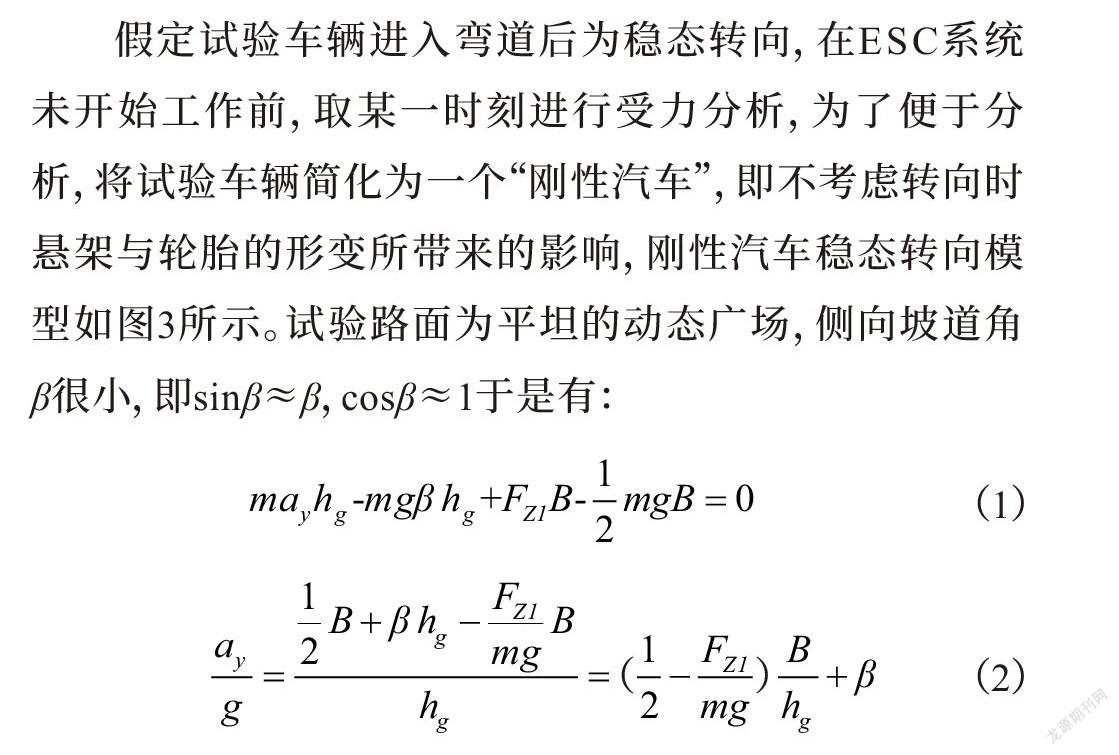
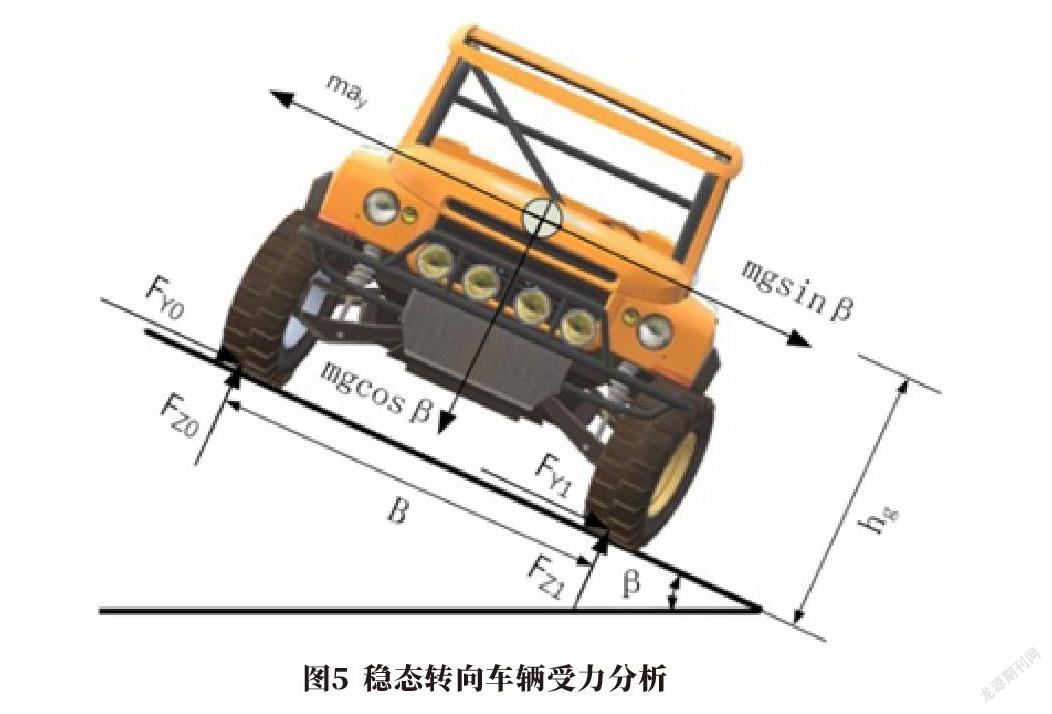
假定试验车辆进入弯道后为稳态转向,在ESC系统未开始工作前,取某一时刻进行受力分析,为了便于分析,将试验车辆简化为一个“刚性汽车”,即不考虑转向时悬架与轮胎的形变所带来的影响,刚性汽车稳态转向模型如图3所示。试验路面为平坦的动态广场,侧向坡道角很小,即sinB≈B,cos3≈1于是有:
式中,m为总质量,kg;a,为侧向加速度,m/s2;B为侧向坡道角;g为重力加速度,m/s2;B为轮距,mm;h为质心高度,mm;F为地面对车轮的垂直力,N;F为地面对车轮的侧向力,N。
由式(2)可知,随着侧向加速度a的增大,F,逐渐减小。当F,减小到零时,试验车辆不能保持平衡,从而开始侧翻,由此可以得到侧翻时刻的加速度阈值:
因此可以通过试验车辆的轮距B和质心高度h来初步预估其转向时的抗侧翻能力,但由于没有考虑轮胎和悬架的弹性,所以预估侧翻时刻的加速度阈值比实际值大。
纯电动车型的质心高度远高于燃油版车型,所以在相同的侧向加速度下,纯电动车型更容易侧翻。
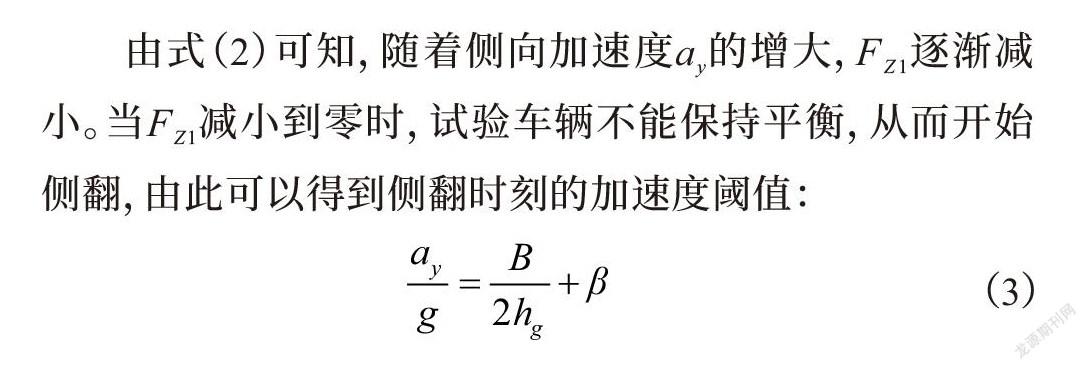
侧翻时刻的加速度阈值α,由入弯时不发生侧翻的极限车速v和试验弯道半径决定:
由于试验时路面水平,坡度角可以忽略不计,可以得到发生侧翻的车速阈值:
式中,vmax为不发生侧翻的极限车速,m/s;umax为不发生侧翻的极限车速,km/h;R为弯道的曲率半径,m。
4.2侧滑分析
试验车辆在入弯后,车辆的侧向力由地面上产生的侧向反作用力F提供,则有:
由式(4)和式(5),可以得到发生侧滑的车速阈值:
式中,p为附着系数。
由式(6)和式(8)可知,在分析转向时侧滑和侧翻发生的先后顺序,只需要比较0和B/2h的大小。
在良好道路情况下,牵引车轮胎的附著系数0一般为0.78~0.88,牵引车常见的轮距B为1.78~2.08m,满载质心高度h为1.54~2.16m,牵引车发生侧翻的车速阈值更小,在车速未达到侧滑阈值时,已开始侧翻。
4.3试验分析
试验车辆在进行ESC试验时,首先需要不断提高进入弯道的试验车速,以确定ESC系统起作用时的初始车速,然后以1.3倍的该车速进行防侧翻控制能力测试。由于试验车辆发生侧翻比发生侧滑的车速阈值更小,车辆紧急转向时更易发生侧翻。在对比燃油版车型和纯电动版车型ESC试验结果时可以发现,两车在试验过程中侧向加速度基本相同,这是由于两车入弯时车速相等,行驶路径一致,因此两车在转向过程中侧向加速度数值和变化相同。EC系统工作后,侧向加速度变化也相同,说明两车ESC系统的控制策略基本一致,即通过监测车辆侧向加速度是否达到设定阈值,来控制ESC系统是否开始工作。试验结果表明,两车设定的侧向加速度阈值相同,但由于纯电动车型质心更高,发生侧翻时的侧向加速阈值更小,所以在转向时,出现了明显侧倾和左后轮组离开地面的情况,而燃油车型未出现上述情况,因此该设定更符合燃油车型的实际情况。
5结语
本文主要针对牵引车纯电动车型在ESC试验过程中出现的异常侧倾情况并从力学的角度展开研究。对比分析了纯电动车型和燃油车型的试验数据和车辆结构,对转向时刻的试验车辆建立了转向力学模型,研究结果表明:a.牵引车在紧急转向时发生侧翻的可能性相比于发生侧滑的可能性更大;b.纯电动车型相比于燃油版车型发生侧翻的极限车速更低。
本文为企业在进行牵引车ESC系统设计时,提高车辆稳定性提供了一定参考。在设计ESC系统时,应重点考虑防止车辆发生侧翻的风险,同时设计不同动力版本的同一车型时,可以针对车辆结构变化,合理制定不同的侧向加速度阈值,从而有效降低ESC系统工作时发生侧翻的可能性。
参考文献:
[1]裴锦华,李以农汽车电子稳定程序控制系统的研究现状及发展趋势[J].天津汽车.2005(2):14-17
[2]杨军基于轮胎力估计的汽车电动助力转向(EP$)与电子稳定性程序(ESP)协调控制研究[D].合肥:合肥工业大学,2018,
[3]Her H,Koh Y,Joa E,et al.An integrated control of differentialbraking,front/rear traction,and active roll moment for limithandling performance[J].IEEE Transactions on VehicularTechnology,.2016,65(6):4288-4300.
[4]朱红岩,游国平.商用车电子稳定控制系统测试技术[J].客车技术与研究,2012(6):48-52.
[5]FMVSS 136.Electronic Stability Control Systems for HeavyVehicles,Final Rule.Federal Motor Vehicle SafetyStandard,Docket No.MHTSA-2015-0056,2015[S].
作者简介:
张文,男,1995年生,助理工程师,研究方向为事整车检测认证和试验评价。
