
基于用户体验的智能驾驶辅助系统应用研究
2022-03-29 09:51刘小娜熊松林张昌博李青昊张健姜凌坤
汽车零部件 2022年3期
刘小娜,熊松林,张昌博,李青昊,张健,姜凌坤
(1.陕西万方汽车零部件有限公司,陕西西安 710600;2.陕西汉德车桥有限公司,陕西西安 710201)
0 引言
随着全球汽车行业保有量的快速增长,能源短缺、环境污染、交通拥堵、事故频发等日益突出,成为汽车产业可持续发展的限制因素,汽车产业中长期发展规划明确提出以智能网联汽车为突破口,实现汽车产业转型升级。目前,我国是世界汽车生产大国和销售大国,到2025年,预计汽车保有量达到3亿辆,千人保有量高达210辆。根据英国交通部门统计研究得出超过40%的车祸原因是用户看不清障碍物和人及注意力不集中导致的车道偏离,目前中国汽车市场有很大的空间,人们对于汽车的功能安全越来越关注,智能驾驶辅助系统在驾驶员遇到紧急情况时,通过控制系统的技术干预,并提供主动支持。
面对城市的复杂路况,以用户操作行为和体验为中心,对智能驾驶辅助系统进行了设计研究,提高驾驶员的操作舒适性,文中的研究对降低驾驶事故概率及缓解驾驶员驾驶疲劳等有着重要的意义。
1 智能驾驶辅助系统
智能驾驶辅助系统是通过传感器对路、车、人、交通标志等进行采集,并通过控制器局域网通信完成信号的传递,协助驾驶员安全驾驶,其中包括车道保持辅助系统、自主换道系统及前向碰撞预警系统等。当车辆偏离车道时,车道保持辅助系统会发出警报,通过用户对车辆的行驶方向进行调整;对于自主换道系统,通过控制算法,判断是否满足换道条件,选择跟驰或自主换道模式,可有效避免人为因素造车的不合理换道,提高安全性和交通效率;前后碰撞预警系统语音或视觉提醒驾驶员注意减速并保持安全距离。
智能驾驶辅助系统为用户的操作方式做减法,对安全多一层保障,通过该系统,使得用户—车—行驶环境之间的联系更加快速和紧密,并减少人在整个系统中的误操作。用户的复杂性和不确定性是系统设计中最易忽略的因素,且与汽车的交互体验是汽车人机关系的重要衡量指标。
2 用户体验介绍
从汽车交互设计谈起,汽车经历了机械时期、电气化时期、半导体电子化时期以及现在的智能网联化时期。电子时期机械按键与操控杆被电子按键和旋钮所代替,提高操作精度;智能网联化时代的到来,以智能触屏、语音及手势等实现便捷化精准操控,交互方式发生了很大的变化,给用户带来了全新的交互体验。
用户体验的定义是人们对于使用或参与产品、服务或系统所产生的感知和回应。每一位产品设计师都是产品的第一用户,提取用户体验需求信息的设计要素对产品设计而言有着重要的作用。闫淑德搭建了实车驾驶数据采集平台,并基于粒子群算法优化BP神经网络建立驾驶习性的辨识模型,实现个性化换道轨迹规划。对驾驶辅助系统的设计要素主要包括用户的操作行为、驾驶习性及交互方式等,应用于产品设计当中。
2.1 用户操作行为
实际路况中司机的车速、驾龄、性格、行驶时间及驾驶操作习惯与安全驾驶息息相关。驾驶员的操作行为是通过信息获取及判断、分析、操作执行等一系列复杂的决策过程,主要包括刹车、油门等纵向运动的操作、转向横向运动的操作。
2.2 驾驶习性
驾驶习性反映出不同驾驶员的驾驶习惯和驾驶规律等,不同的驾驶员对于同一工况时的习惯性反映方式及操作方法,有一定的相似及稳定性,文中根据用户的操作行为分为激进型、适度型和谨慎型3种类型。此外,受外界因素(雨天、拥堵、心情糟糕)的影响,也同样导致驾驶行为产生随机性变化。
2.3 交互方式
交互智能是将大数据和人工智能结合起来,使汽车更“懂”用户。以威马W6为例进行分析,其配置多样化交互技术,包括人脸识别、主动疲劳监测,支持自然唤醒、关键词唤醒、快捷指令唤醒等多种交互方式,实现超过120余项常用功能语音控制并支持15 s连续自然语音对话。
3 联合仿真分析验证
3.1 换道预警策略模型
换道预警系统辅助驾驶员分析当前复杂路况,判断车辆纵向及横向位置,选择合适时机进行换道,可有效避免驾驶员对换道行为做出错误判断,减少车辆追尾、剐蹭及侧向碰撞等事故。目前国内外已经研究出许多独具特色的换道系统模型,最早是1986年Gipps建立道路换道决策结构框架,在合理驾驶行为条件下模型,以换道过程中的潜在冲突为研究条件,分析交通信号及重型车等对换道过程的影响,后来的研究者根据这个方向,发散出其他换道模型,最典型的案例包括MRS(Multi-Regime Simulation)、MITSIM模型、NETSIM模型、SITRAS模型和南加州大学最小安全距离模型等。
换道的动机主要由驾驶员的特性和外部驾驶环境的刺激两方面决定,驾驶员的特性包括驾驶习性、最大加减速和忍耐度等;外部驾驶环境的刺激主要是准备换道车辆所在车道和相邻车道的共同刺激,包括主车以及前车的间距、速度差和前车是否准备换道等因素。
文中主要以驾驶员的特性为主要研究对象,驾驶人的驾驶习性一般分为激进型、适度型和谨慎型,如图1所示,对于直路换道工况,不同驾驶习性相关参数输入至Matlab/Simulink-CarSim 联合仿真平台搭建个性化换道预警策略模型,匹配个性化换道预警策略,输出为车辆行驶的相对位移的轨迹。
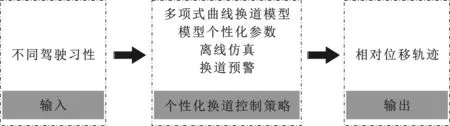
图1 换道预警策略模型
3.2 模型分析验证
换道场景路段与车辆相关参数的设定,车道标准宽度=3.5 m,直线段长度30 m,车宽=1.75 m,车长=4.7 m,主车(图2左侧车)与前车(图2右侧车)的相对距离为25 m。以主车车辆的前端为换道起始时刻,基于车辆的行驶和垂直两个方向上,针对3种驾驶习性以水平和垂直两个方向分别选用5次多项式来规划换道轨迹。

(1)
式中:和都是待定参数。
其中=[],=[],分别对()、()求一阶导和二阶导,可得出车辆在换道过程中的横纵向速度及加速度,与车辆的水平和垂直的位移关系相结合,可得出车辆目前的状态函数。
通过 Matlab软件创建控制策略模型,输出3种驾驶习性的相对位移轨迹曲线,如图2所示。在检测符合安全换道的条件时,将按照符合驾驶习性的相关参数进行换道轨迹规划,相关参数生成的相对横向速度和相对纵向速度与时间的关系如图3所示。在避免碰撞和跟车行驶相关要求的前提下,匹配个性化换道预警策略,提高换道轨迹适应性。
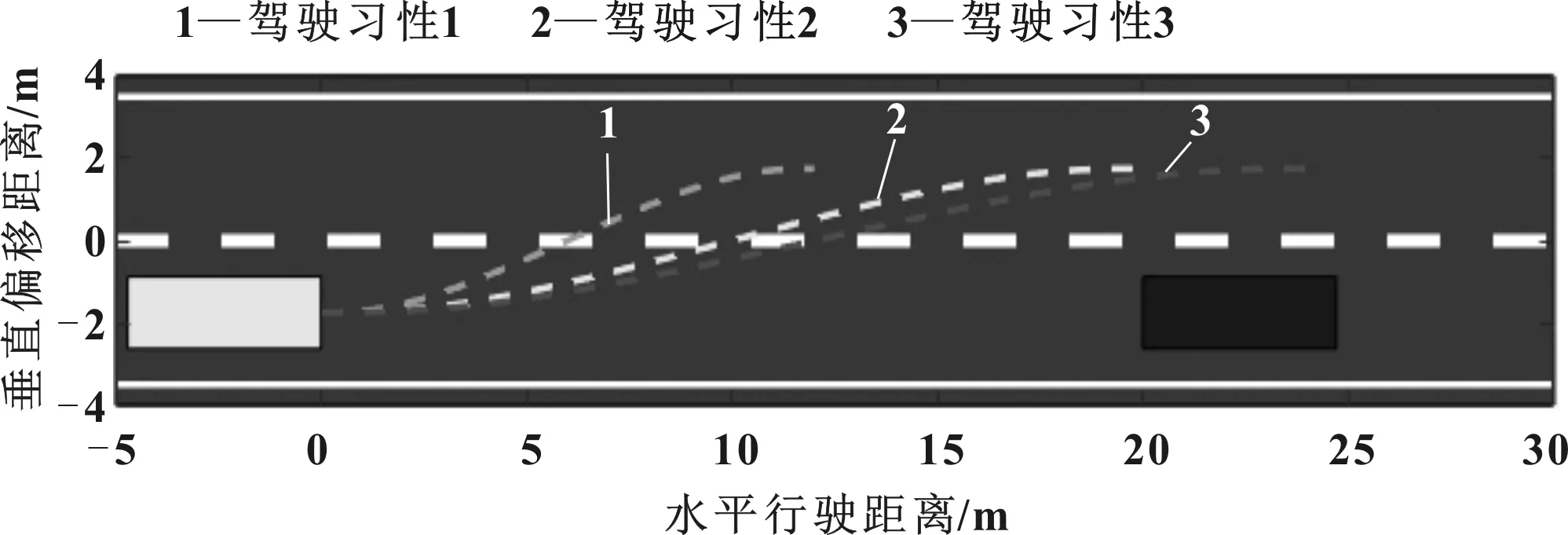
图2 3种驾驶习性轨迹曲线
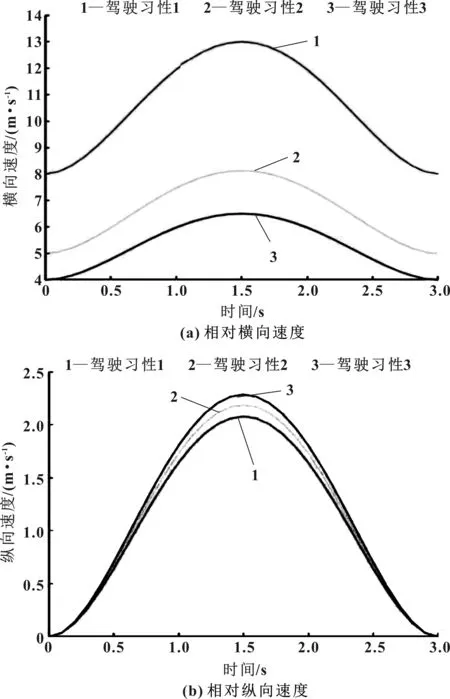
图3 换道过程中生成参数的变化
3.3 仿真结果分析
综上分析可得,激进型驾驶员换道时,个性化匹配的相对横向速度最高且变化幅度最大,在转向指令发出后1.5 s左右,达到最大速度;适度型驾驶员换道时,个性化匹配的相对速度居中,操作稳定适中;谨慎型驾驶员换道时,个性化匹配的相对速度稍缓,速度变化幅度相对较低。相对纵向速度变化趋势相近且整体变化值在2 m/s的范围内浮动,在转向换道过程中影响不大。
4 结语
以不同驾驶习性的驾驶员在自主换道中的个性化控制策略匹配分析为案例。用户根据自己的驾驶习性操作习惯及驾驶风格等确定驾驶类型,系统通过对用户的个性化分析,确定用户类型并在辅助系统中匹配相关驾驶参数,使得智能驾驶辅助系统符合用户自身的驾驶习惯,提高驾驶人的操作舒适性。智能驾驶辅助系统也可根据环境因素、路况等对相关驾驶参数做一些调整,保证驾驶的安全性。个性化的用户体验在智能驾驶辅助系统中的应用,一方面可以保证安全驾驶,另一方面提高驾驶人与车辆之间的交互默契性和驾乘舒适性。
安全、智能、舒适的汽车驾驶体验是汽车未来的发展方向,对于自主品牌汽车研发而言,为用户提前识别并预警潜在的安全问题,降低事故发生的概率,对于智能化的驾驶辅助系统开发仍极具挑战。
猜你喜欢
工业设计(2022年9期)2022-10-13
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
小猕猴学习画刊(2019年10期)2019-11-21
奥秘(2019年1期)2019-03-28
作文·初中版(2017年7期)2017-09-04
中学数学杂志(初中版)(2017年4期)2017-08-28
中学科技(2015年11期)2015-11-25
时尚北京(2015年7期)2015-07-31
