
有色噪声下GNSS空时抗干扰算法的性能分析和改进
2022-04-21 02:08赵辰乾刘益辰
电子与信息学报 2022年4期
赵辰乾 刘益辰 刘 欣
(中国船舶工业系统工程研究院 北京 100094)
1 引言
卫星导航系统可以在全球范围内为用户提供高精度的定位、导航和授时服务,在军用和民用领域发挥着越来越大的作用。但是卫星导航信号非常脆弱,极易受到各种有意和无意信号的干扰而无法正常工作,因此卫星导航抗干扰技术一直是人们研究的热点[1]。
卫星导航抗干扰技术主要包括时域滤波、频域滤波、空域滤波和空时联合滤波等,其中空时联合滤波器[2]将阵列天线与时间延迟结构相结合,可以在不增加天线阵元个数的情况下,极大地提高抗干扰性能,因此得到了广泛的研究与应用。空时滤波器一般采用自适应调零和波束形成两类抗干扰算法。自适应调零算法通过在干扰方向形成零陷来抑制干扰,典型代表是功率反演算法(Power Inversion, PI)[3]。波束形成算法利用了导航卫星的方向信息,不仅在干扰方向形成零陷,还在导航卫星方向保持增益,典型代表有最小方差无失真响应(Minimum Variance Distortionless Response,MVDR)[4]、最大信干噪比(Maximum Signal Interference Noise Ratio, MSINR)[5]和最小均方误差算法(Minimum Mean Square Error, MMSE)[6]。
目前已有大量的文献对阵列信号模型[7,8]和抗干扰算法[9]进行了分析与研究。在理论分析中,各文献普遍将系统噪声视为理想白噪声。然而在实际工程中发现许多因素都会导致非白噪声的产生,例如抗干扰处理器模拟前端的频率响应不理想,系统带宽与采样率不匹配等,且有色噪声会降低空时抗干扰算法的性能。
当前,对这一问题进行研究的文献较少。文献[10]分析了采样率和系统带宽对空时抗干扰滤波器性能的影响,结果表明当采样率与系统带宽不匹配时,空时抗干扰后卫星导航信号相关曲线质量会显著降低。而产生这一问题的根本原因就是有色噪声。当采样率低于系统带宽时,噪声信号的频谱会产生混叠;当采样率高于系统带宽时,噪声信号成为带通形式,这两种情况都会导致有色噪声的产生。
本文以抗干扰后卫星导航信号的相关曲线为评价标准,从理论和实验两方面分析有色噪声对空时抗干扰算法性能的影响。最后采用“对角线加载”与“子空间投影”两种技术来改进抗干扰算法,消除有色噪声的影响。
2 空时抗干扰理论
2.1 空时滤波器结构
空时滤波器结构模型如图1所示。

图1 空时滤波器结构
设空时滤波器中的天线阵元个数为M,时延阶数为N。空时滤波器的处理流程为:
(1) 空时滤波器的M个天线阵元接收到M路射频信号。
(2) 对M路射频信号进行下变频、滤波和采样量化处理得到M路基带数字信号。
(3) 对M路数字基带信号分别进行N–1次时间延迟得到MN路信号,信号矢量可以表示为

2.2 空时抗干扰算法
空时抗干扰算法的核心是求解权向量。空时滤波器有自适应调零和波束形成两类抗干扰算法。本文选用两类算法的典型代表PI和MVDR来进行后续的理论分析与实验仿真。
空时信号的协方差矩阵为

PI算法采用功率最小准则并使第1路信号全通。数学公式可以表示为

2.3 抗干扰性能评价指标
为了进一步分析有色噪声对空时抗干扰算法性能的影响,需要首先确定抗干扰算法的性能评价指标。常用的抗干扰算法评价指标是抗干扰输出端信号的信干噪比(Signal to Interference Plus Noise Ratio,SINR),但是已有研究指出SINR体现的是导航信号解扩前的性能而无法正确反映信号解扩后的性能而且SINR也无法反映导航信号的失真情况[12,13]。因此本文选择抗干扰后卫星导航信号的相关曲线作为性能评价指标。相关曲线的计算公式为[14]

3 有色噪声的影响
本节分析有色噪声对空时抗干扰算法性能的影响。首先假设系统噪声具有以下两点性质:
(1) 各通道噪声互不相关,且与干扰信号和卫星导航信号互不相关。
(2) 各通道噪声功率相同,且具有相同的功率谱密度函数。
空时信号的协方差矩阵可以分解为


通过上述推导可得噪声功率谱密度函数会影响空时抗干扰后卫星导航信号的相关峰。下面通过仿真实验验证上述结论,同时分析噪声功率谱的等效带宽和谱峰偏移两个特征对相关峰的影响。
实验条件:空时滤波器采用4阵元平面圆阵,阵元间距为B3频点的半波长,中频采样率与系统带宽均为24 MHz。卫星导航信号采用北斗B3I信号,调制方式为BPSK,码速率为10.23 MHz,信噪比为–20 dB,到达方向为俯仰角60°,方位角0°;干扰信号为连续波信号,干信比为100 dB,到达方向为俯仰角70°,方位角200°。
实验1:噪声等效带宽对抗干扰后卫星导航信号相关峰的影响。
等效带宽可以反映有色噪声功率谱能量集中程度,其计算公式为

有色噪声的等效带宽越小,噪声的功率谱能量越集中;等效带宽越大,噪声的功率谱能量越均匀;当等效带宽为1时,噪声功率谱为常数,噪声信号为白噪声,如图2所示。
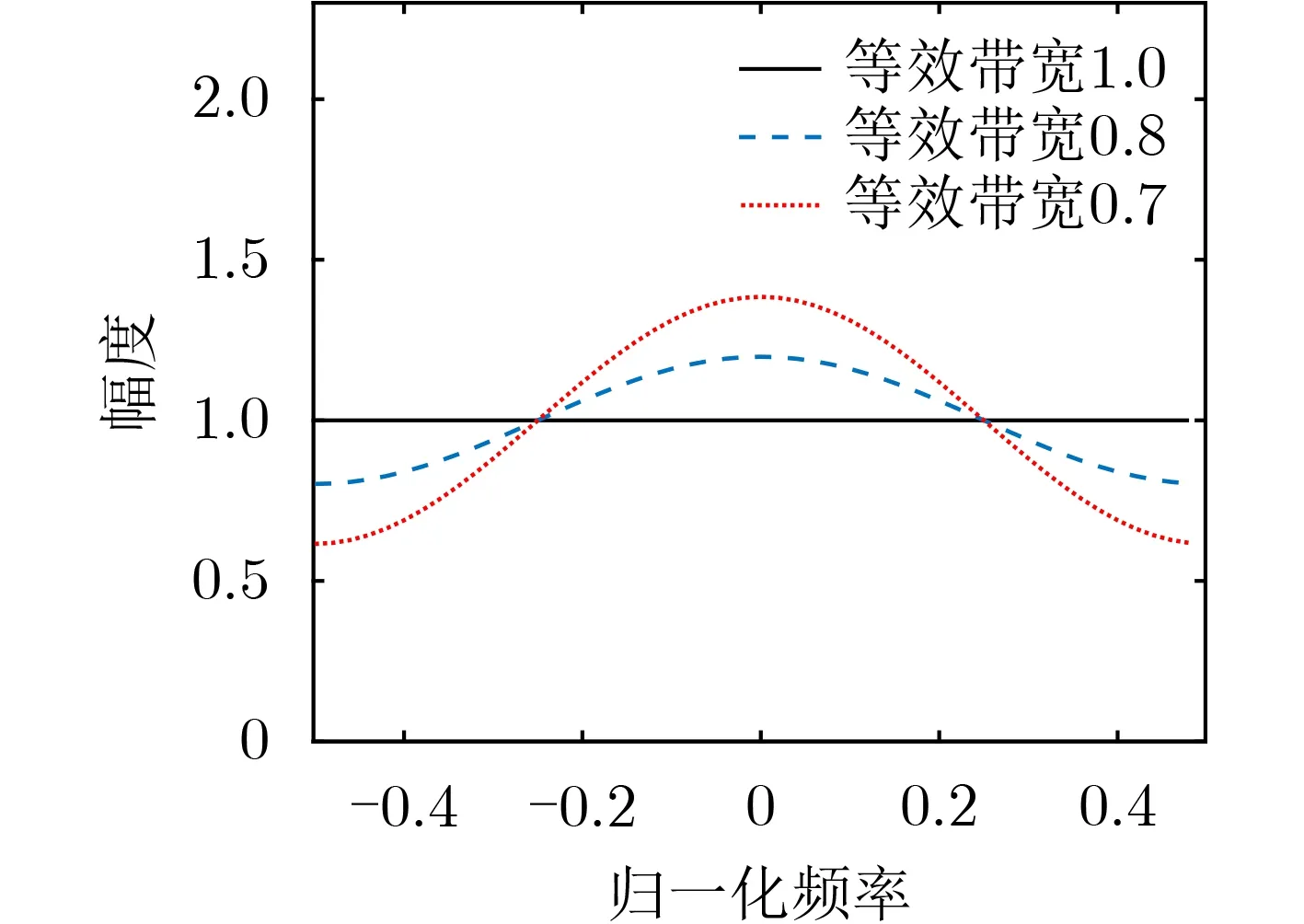
图2 不同等效带宽下噪声信号的功率谱
实验中,保持噪声功率不变,只改变噪声等效带宽。噪声信号功率谱的谱峰位于系统中心频率且左右对称。分别选取PI和MVDR算法进行仿真,同时改变空时滤波器的时延阶数(包括1, 3, 5, 7阶时延),最后将结果与理论公式进行比较。实验结果如图3、图4所示。
图3和图4分别采用了PI和MVDR算法,仿真了在不同时延阶数的空时滤波器下,噪声等效带宽与抗干扰后卫星导航信号相关峰的关系。

图3 噪声等效带宽与PI抗干扰后卫星导航信号相关峰的关系

图4 噪声等效带宽与MVDR抗干扰后卫星导航信号相关峰的关系
通过实验1可得到下述两个结论:
(1) 采用1阶时延结构时,即纯空域滤波器,PI和MVDR算法都不会受到有色噪声等效带宽的影响,抗干扰后卫星导航信号的相关峰值不会衰减。
(2) 采用多阶时延结构时,即空时滤波器,PI算法和MVDR算法都会受到有色噪声等效带宽的影响。有色噪声等效带宽越小,其功率谱能量越集中在中心频点处,抗干扰后卫星导航信号的相关峰衰减越大,且随着时延阶数的增大,实验结果趋近于理论值。
实验2:谱峰偏移对相关峰的影响
实验分析有色噪声功率谱的谱峰偏移对空时抗干扰后导航信号相关峰的影响。噪声功率谱的谱峰偏移如图5所示。

图5 不同谱峰偏移的噪声信号功率谱
实验中,保持噪声功率和功率谱形式不变,只改变功率谱的谱峰偏移。分别选取PI和MVDR算法进行仿真,同时改变空时滤波器的时延阶数(包括1, 3, 5, 7阶时延)。实验结果如图6、图7所示。
图6和图7分别采用了PI和MVDR算法,仿真了在不同时延阶数的空时滤波器下,噪声功率谱的谱峰偏移与抗干扰后卫星导航信号相关峰的关系。

图6 噪声谱峰偏移与PI算法抗干扰后卫星导航信号相关峰的关系
通过实验2可得到两个结论:
(1) 采用1阶时延结构时,即纯空域滤波器,PI和MVDR算法都不会受到有色噪声谱峰偏移的影响,抗干扰后卫星导航信号的相关峰值不会衰减。
(2) 采用多阶时延结构时,即空时滤波器,PI算法和MVDR算法都会受到有色噪声谱峰偏移的影响。有色噪声的谱峰离中心频点越远,卫星导航信号的相关峰值衰减越小,且随着时延阶数的增大,实验结果趋近于理论值。
综合实验1和实验2可得以下3个结论。
结论1:空域滤波器性能基本不受噪声功率谱形式影响。
结论2:空时滤波器性能受噪声功率谱形式影响较大,噪声功率谱能量越集中于卫星导航功率谱谱峰处,空时滤波器处理后的卫星导航信号相关峰值越小。
结论3:时延阶数越高,实验结果越趋近于理论值,因此可以验证理论的正确性。
4 抗干扰算法改进
通过第3节的分析可知,空时抗干扰后卫星导航信号的相关峰与噪声功率谱形式有关。这是因为噪声功率谱会影响噪声协方差矩阵,然后通过矩阵求逆方式影响抗干扰算法的权向量,进而影响噪声信号与卫星导航信号的频率响应函数,最后影响卫星导航信号的相关峰。本节提出对角加载和子空间投影两种方法,通过对协方差矩阵进行处理来消除有色噪声对空时滤波器的影响。
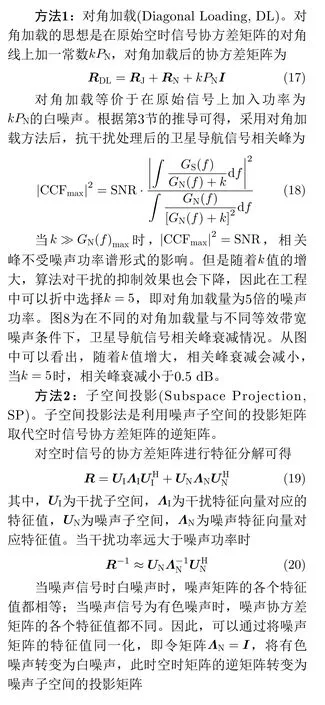

图8 对角加载量与相关峰衰减的关系

下面通过实验来验证对角加载、子空间投影算法的性能。仿真实验的条件与第3节相同,空时滤波器的时延阶数是3阶,实验中只改变抗干扰算法。
实验结果如图9和图10所示,图9为原始PI算法与经过对角加载和子空间投影后算法性能的比较,图10为原始MVDR与经过对角加载和子空间投影后算法性能的比较。

图9 原始PI算法和对角加载、子空间投影后算法性能的比较

图10 原始MVDR算法和对角加载、子空间投影后算法性能的比较
通过实验可得,采用对角加载和子空间投影算法后,空时抗干扰后卫星导航信号的相关峰基本不受噪声等效带宽的影响。采用子空间投影法抗干扰后,卫星导航信号的相关峰值比采用对角加载法抗干扰后的信号相关峰值高零点几分贝,且有色噪声等效带宽越小,子空间投影法的性能越优于对角加载法。
对角加载法和子空间投影法都是通过对噪声协方差矩阵的特征值进行一致化处理实现有色噪声的白化。当噪声信号为白噪声时,噪声协方差矩阵为单位矩阵,它的所有特征值均相等;当噪声信号为有色噪声时,噪声协方差矩阵特征值不相等,且有色噪声功率谱能量越集中(等效带宽越小),其特征值的最大最小值的差异越大,即λmax/λmin值越大。对角加载法通过引入固定的加载量k,使(λmax+k)/(λmin+k)趋近于1,从而实现有色噪声的白化。对于固定的加载量k,有色噪声的等效带宽越小,(λmax+k)/(λmin+k)值会越大,噪声白化效果降低,因此性能会下降。为解决此问题,需要增大对角加载量,但是对角加载值太大会影响算法的干扰抑制效果。子空间投影通过特征分解求得信号的干扰子空间和噪声子空间,并将噪声子空间中的所有特征值都置为1,因此噪声白化更彻底且不会受到有色噪声功率谱形式的影响,但是子空间投影法需要进行矩阵特征分解,计算复杂度更高,而且需要确定门限值来划分噪声子空间和干扰子空间。
5 结束语
空时滤波器对噪声形式非常敏感,传统的抗干扰算法如自适应调零和波束形成算法的性能都会受到有色噪声功率谱形式的影响,有色噪声功率谱的能量越集中于卫星导航功率谱谱峰处,抗干扰后的卫星导航信号相关峰值越小,算法性能越差。
对角加载和子空间投影方法通过对噪声协方差矩阵特征值的一致化处理实现有色噪的白化,从而消除有色噪声对空时抗干扰算法的影响。对角加载方法性能略低于子空间投影法且会随着有色噪声等效带宽变小而下降,但计算和实现复杂度低;空间投影法性能更优且不受有色噪声功率谱形式影响,但需要进行特征分解和门限选择,计算和实现复杂度更高。
猜你喜欢
中老年保健(2022年6期)2022-08-19
通信电源技术(2020年8期)2020-07-21
电子制作(2019年23期)2019-02-23
数学大王·低年级(2018年4期)2018-05-07
Coco薇(2017年11期)2018-01-03
Coco薇(2017年8期)2017-08-03
现代防御技术(2016年1期)2016-06-01
现代企业(2015年8期)2015-02-28
科技视界(2014年26期)2014-12-25
全球定位系统(2011年6期)2011-07-18
