非合作目标动态RCS特性的实时估计方法
2022-05-06 04:56吴元伟刘广君
舰船电子对抗 2022年2期
吴元伟,刘广君,2
(1.中国空空导弹研究院,河南 洛阳 471009;2.航空制导武器航空科技重点实验室,河南 洛阳 471009)
0 引 言
雷达截面(RCS)是与测量雷达波段、极化、目标运动姿态相关的物理量,RCS测量与评估是雷达目标特性研究的主要内容。动态RCS特性的描述包含目标运动的俯仰、方位、横滚姿态信息,在计算目标的极化矩阵、探测和识别目标类型、判断目标攻击态势方面有十分重要的应用。
在现代空战中,敌方目标的气动、散射特性未知,是典型的非合作目标。交战双方在预警机或机载雷达的指引下发现目标,锁定目标。根据敌机的动态目标RCS的信息可以优化作战方案,提前占位,以更好地发挥我方武器装备的作战性能,提高对敌方目标拦截的成功率。但在交战前,很难得到非合作目标的准确RCS特性信息,严重地限制了武器装备性能的发挥。因此,研究非合作目标的动态RCS特性测量方法是很有必要的。
目标的RCS特性主要通过实测和建模仿真两种方法获得,传统的测量方法对于非合作目标无法实现。近年来,对于中段弹道、飞机、卫星等飞行器,通过建模和电磁计算的方法,对目标的动态RCS分布特性进行了仿真和统计分析。文献[6]提出了基于航迹的飞机姿态角估计方法,但缺乏从战场态势感知方面对非合作目标的动态RCS特性进行实时评估的方法。
本文以空战三维动态仿真为场景,提出了一种以雷达测量信息为基准,估计非合作目标的实时飞行态势,评估其动态RCS的方法。
1 动态RCS估计方法
目标的动态RCS特性的描述包含目标运动的俯仰、方位、横滚姿态以及对应的RCS数据。对于非合作目标的雷达量测信息,以测量雷达所在的惯性坐标系为基准,目标的相对位置为:
()=((),(),())
(1)
目标的速度为:
()=((),(),())
(2)
据此估算目标动态RCS特性的方法如下。
1.1 目标RCS估计原理
估算目标RCS的原理是雷达方程,需要提前对测量雷达不同模式、不同工作状态下的信号回波进行校正,以脉冲多普勒雷达为例,在距离处的RCS为的目标,其信噪比为:

(3)
式中:为天线峰值功率;为雷达发射波形占空比;为天线增益;为工作波长;为天线罩单程透过率;为波尔兹曼常数1.38e;为常温290 K;为信号处理带宽;为雷达噪声系数;为系统损失;为波段电磁波在大气中的单程衰减系数;为雷达的热噪声本底。
对于非合作目标,测量其在距离处的目标,假设在工作过程中,雷达辐射功率、收发增益、信号处理损失等条件的变化可以忽略,则根据雷达方程,可以计算出对应距离=1 m处目标的信噪比S/N。据此得到非合作目标RCS的序列为:
=·S/N
(4)
1.2 目标姿态估计方法
由于非合作目标的结构、气动特性未知,因此假设目标为六自由度刚体,目标轴向与速度方向一致,依据飞行器的动力学模型和雷达测量得到的轨迹信息,可以计算目标的近似姿态角。
目标俯仰角计算公式为:

(5)
当()+()≠0时,目标方位角为:
()=arctan2((),()),-π≤≤π
(6)
根据目标的动力学模型,目标的横滚角满足以下公式:
(7)
式中:()、()分别为目标在方位和俯仰向运动的角速度,可以得到:

(8)

与公式(6)类似,由此可得目标的横滚角()。
假若在=时刻,()+()=0,目标在水平面上的速度为0,该状态是瞬时的,定义:

(9)
根据公式(5)、(6)、(7)可以求得目标的姿态序列,但由于目标的航迹是雷达量测结果根据航迹通过差分方式计算得到的,姿态角序列起伏较大,可以通过卡尔曼滤波实现对目标姿态的平滑和实时预测。
1.3 目标动态RCS特性估计
由于目标姿态是在测量雷达所在的惯性坐标系进行计算的,为了将目标运动姿态与RCS进行关联,需要将目标相对雷达的位置转换到目标机体坐标系,从而得到雷达视线在目标机体内的入射角度。
根据估计得到的目标机体的姿态,可得惯性坐标系至机体坐标系的转换矩阵分别为:
(10)

(11)

(12)
据此计算雷达视线在目标坐标系的矢量为:
()=()
(13)
进而得到雷达视线在目标坐标系的极坐标位置为:
()=((),(),())
(14)
式中:()、()为雷达视线入射的俯仰、方位角序列。
根据得到的RCS序列,整理得到雷达入射角度-RCS关系,从而得到目标的动态RCS特性,用于对目标进行识别,对作战方案进行规划决策。
2 仿真验证
以下利用某型雷达产品在挂飞试验中测量得到的目标信息,结合试验获得的目标的真实GPS位置与姿态信息,对本文目标动态RCS特性估算方法的有效性进行验证。试验中目标相对于雷达运动的航迹如图1所示,目标在雷达前方约25 km、下方约1.5 km、左方1.8 km处向雷达飞行,在距离接近的过程中同时做S机动,S机动的角度约为±30°。

图1 目标运动航迹
利用雷达测量的目标位置和速度信息,计算得到其俯仰、方位和横滚角如图2、图3和图4所示。由图中可以发现,俯仰角的估算值与真值的差异较明显,这是由于目标运动过程中垂直方向的速度分量较低,使测量形成的误差消除较慢。目标机动时三维姿态估值的变化都滞后于真实信息,这是因为物理上目标机动时是姿态先作出调整,后续才反映在目标速度的变化上,而目标姿态的估算方法利用的是位置和速度的差分信息,由果推因,需要目标运动产生一定的变化量后才能显现出来。该滞后效应在横滚角的估值中更加明显,因为横滚角的估值用到了位置的二阶差分,其估值的离散性也更大。
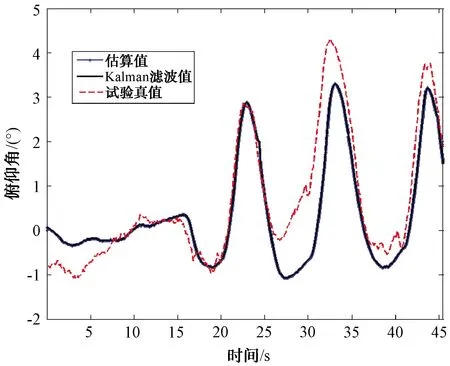
图2 目标运动俯仰角估值与真值对比

图3 目标运动方位角估值与真值对比
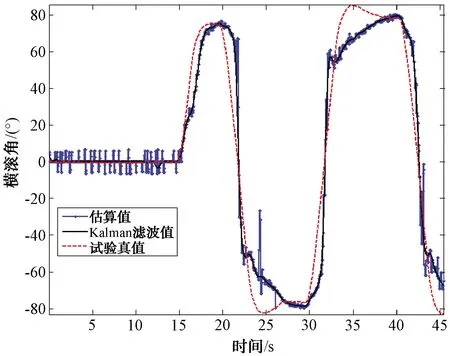
图4 目标运动横滚角估值与真值对比
另外,对非合作目标姿态估算时,假设目标的速度方向与其轴向一致,而实际飞行器机动时的气动过程决定了其速度方向与轴向必然存在一定的攻角,也将导致该滞后现象的产生。总体上,目标姿态的估计值与真实值吻合得较好,算法的有效性得到了验证。由图中也可以发现,Kalman滤波能够很好地实现对目标姿态信息的平滑和预测。
根据雷达对目标测量的信噪比以及标定后的雷达状态参数,估计得到该目标的RCS序列如图5所示,目标机动过程中姿态变化引起RCS的起伏大于10 dB。

图5 估计得到的目标RCS-时间序列
估计得到目标的姿态数据后,根据雷达测量得到的目标位置坐标,通过坐标转换至目标机体坐标系内,计算得到雷达入射的俯仰和方位角,如图6所示。结合目标RCS的时间序列,得到目标的动态RCS特性。

图6 估计得到的目标RCS-时间序列
改变雷达的波形可以获得目标不同维度的特征信息,通过长时的观测积累可构建非合作目标的运动特征模型、RCS特征库,用于对非合作目标的识别,对目标态势的评估,对作战方案的决策。对于合作目标,该方法也可应用于对目标RCS建模仿真结果的验证。
3 结束语
战场环境中非合作目标的飞行姿态以及其动态RCS的实时估计对于战场态势的综合感知十分重要。本文基于雷达对非合作目标的测量信息,提出了对目标的姿态进行实时估算和预测的方法,进一步得到目标的动态RCS。通过飞行试验结果的分析,验证了算法的有效性。
本文提出的算法对于雷达的平台、雷达波形无使用限制,可应用于战斗机、预警机、岸基或舰载雷达对目标的跟踪与数据分析,构建目标的多维RCS特征样本库,用于战场目标识别和态势评估。但由于算法依赖目标测量信息的准确性,干扰环境下有效信息的筛选以及算法的适用性有待进一步研究。
猜你喜欢
茶道(2022年3期)2022-04-27
中学生数理化·高一版(2021年11期)2021-09-05
语数外学习·高中版中旬(2021年11期)2021-02-14
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
CHIP新电脑(2017年6期)2017-06-19
商界评论(2016年11期)2016-12-01
中学生数理化·高二版(2016年5期)2016-05-14
Coco薇(2016年2期)2016-03-22
阅读(中年级)(2009年11期)2009-04-14