一种异步干扰的自适应检测和剔除方法
2022-05-06 04:46廉志凌
舰船电子对抗 2022年2期
廉志凌
(中国电子科技集团公司第三十八研究所,安徽 合肥 230031)
0 引 言
对于机载雷达来说,由于覆盖范围广,导致它不仅面临着来自空中的电磁干扰,地面干扰和地面雷达也会对雷达的回波信号带来调制,进而影响雷达的性能。特别地,当干扰信号来自于同频段雷达时,这种干扰称为同频异步干扰。
对于异步干扰信号,付启众已对其特点进行了分析,指出其有突出性、随机性和高斯性3个特点,并在此基础上提出了一种先将接收信号进行动目标指示(MTI)对消,然后采用恒虚警率(CFAR)结合距离杂波图技术,最后采用门限检测方法检测干扰,使用邻近信号替换干扰信号的处理办法。
本文在对实测数据分析的基础上,提出了先对回波信号正常处理,然后在频域根据频谱特性判定是否存在异步干扰,若不存在干扰,则处理流程不变;若存在干扰信号,则需要先剔除干扰信号再变换到频域,并将原来存在干扰信号的频域数据用剔除干扰之后的频域数据替换。与付启众的方法相比,本文方法不改变正常的处理流程,实现简单,运算量小,对平台是否运动没有要求。
1 异步干扰的特征
通信设备、广电设备、导航设备以及地面雷达或者机载雷达均会产生电磁波。当这些设备发射的频谱和雷达自身频谱存在一定的重合时,干扰信号会进入接收机,对接收信号形成调制。
正常情况下,这些干扰设备或者距离雷达较远,或者不在同一频段,或者干扰从雷达的旁瓣进入,从而对于雷达的正常工作基本没有影响。然而,当干扰从主瓣进入时,干扰信号将会与正常回波信号叠加,从而对信号的幅度和相位产生调制,在时域表现为幅度的突变(变强或者变弱)和相位的跳变。
图1为存在异步干扰时采集的实测数据,其中图1(a)、(b)为干扰所在距离单元的幅度特性和相位特性。可以看出无论是信号的幅度还是相位,相对于相邻脉冲,均发生了跳变。
图1(c)、(d)则为存在异步干扰时,一个相干积累时间内雷达收到的回波数据的特性。其中图1(c)为回波数据的时域特征,图1(d)为回波数据的频域特征。可以看到,异步干扰信号在时域表现为某些脉冲的部分距离单元的信号幅度异常(增加或减小),在频域则表现为频谱展宽。通常情况下,我们都是在频域检测目标的,干扰频谱的扩展将会使得一些目标很难被检测到。
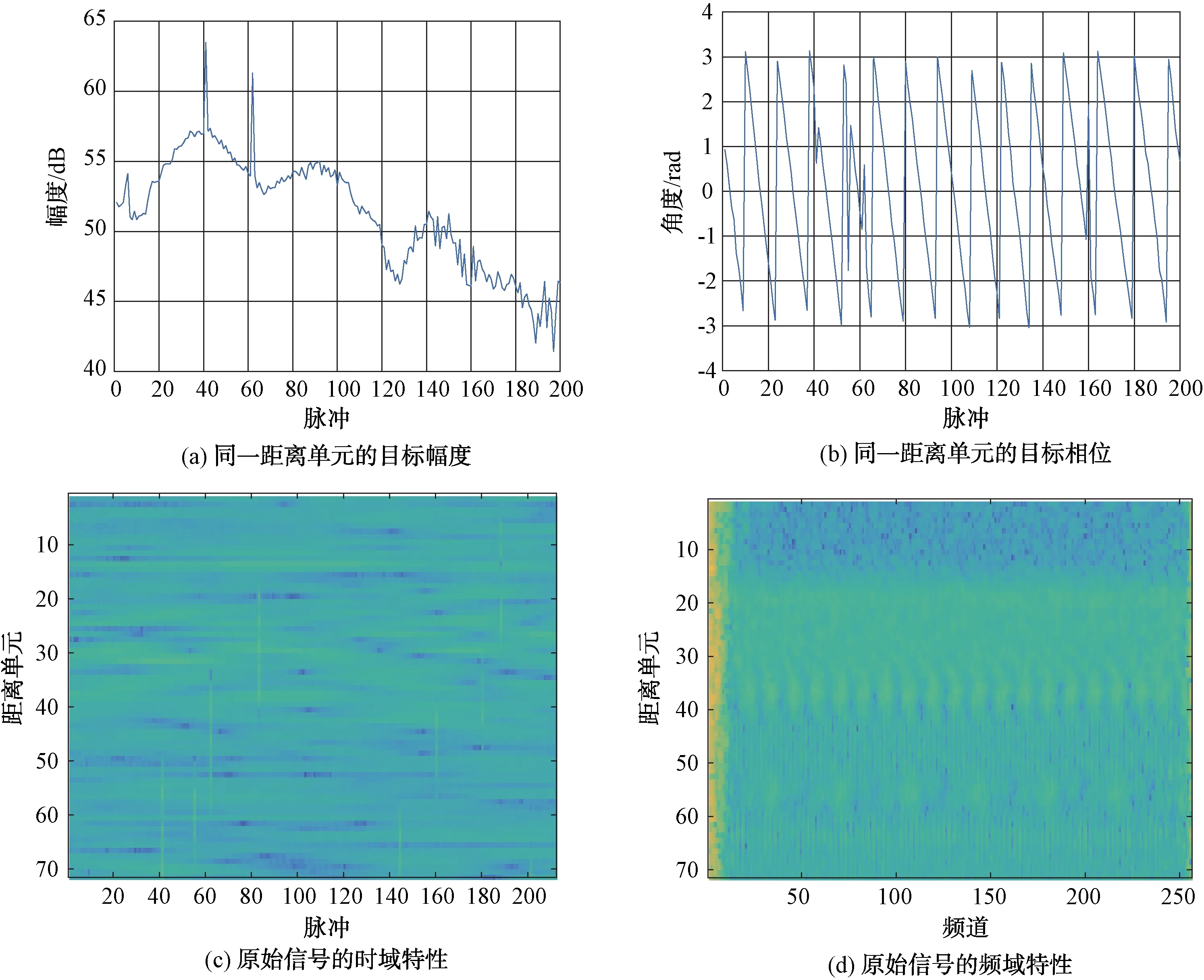
图1 存在干扰时的信号特征
2 异步干扰的检测和剔除
显然,异步干扰的存在会引起杂波谱展宽,可以据此检测在频域回波中是否存在异步干扰。当不存在干扰,或者干扰的影响不大时,依然按照正常处理流程处理;当系统检测到异步信号时,启用插值处理,剔除干扰,检测目标,算法流程如图2所示。
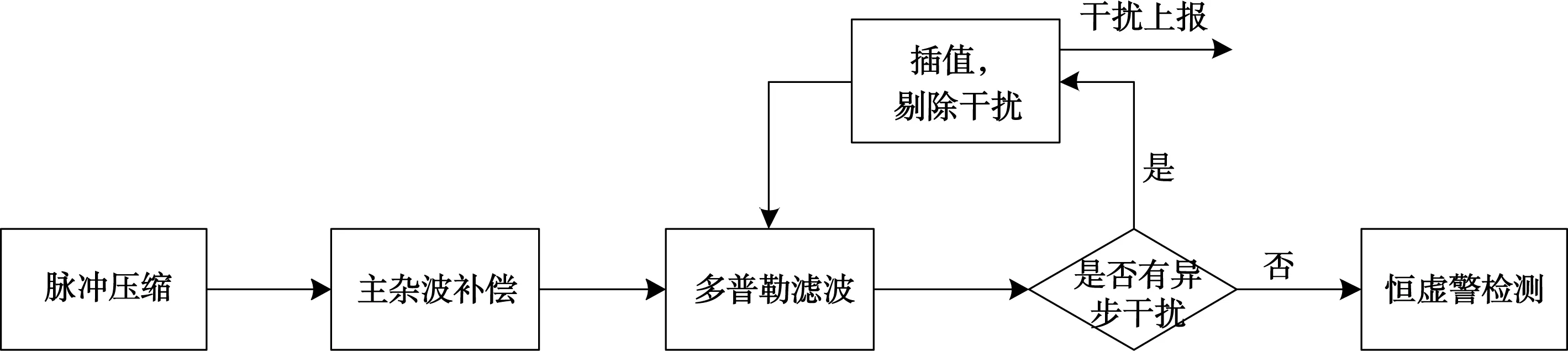
图2 异步干扰抑制流程
2.1 异步干扰的检测
异步干扰检测的原理是,异步干扰的存在会造成杂波谱展宽,抬高系统的噪底。因此,只要检测系统的噪声水平,即可确定是否存在异步干扰信号,系统流程图如图3所示。算法步骤如下:
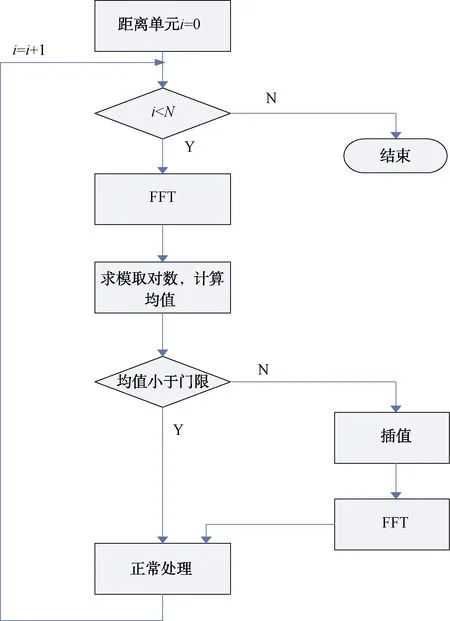
图3 干扰检测的流程图
(1) 首先对分距离单元对杂波补偿后的回波信号进行快速傅里叶变换(FFT),变换到频域;
(2) 对频域信号进行求模取对数;
(3) 对对数数据剔除主杂波之后,求取均值;
(4) 将该均值与检测门限比较,若大于检测门限,则说明信号中存在干扰,则需要先插值,然后重新进行FFT变换;
(5) 返回第一步,直至所有距离单元处理完成。
2.2 噪声背景估计
上述干扰检测中的门限是由系统的噪声门限加上手动门限组成的。手动门限的设置不能太高,过高会造成干扰检测的漏警;也不能设置过低,过低会将正常信号当成干扰信号,增加不必要的运算,甚至造成正常信号的频谱变差。
而噪声门限的计算方法与上述方法类似,不同之处在于采用迭代方法估计系统噪声,方法步骤如下:
(1) 首先对分距离单元对杂波补偿后的回波信号进行FFT,变换到频域;
(2) 对频域信号进行求模取对数;
(3) 对对数数据剔除主杂波之后,求取均值;
(4) 对整个回波信号每个距离单元的均值求和,然后求取二次均值。
噪声背景更新的公式为:

(1)
式中:为更新后的噪声门限;-1为更新前的噪声门限;为当前波位的噪声均值;为需要滑窗的波位个数。
2.3 插值处理
雷达在某个脉冲接收到的回波信号可表示如下:
=·exp(j2π(-1)+j2π)+
(2)
式中:为系统的幅度响应;为多普勒频移;为线性调频信号的调频率;为距离上的快时间;为方位向的慢时间;为系统噪声;为脉冲号。
假定某个距离单元的第个脉冲存在异步干扰,则第-1、、+1脉冲的信号可分别表示如下:
-1=-1·exp(j2π(-1)+j2π)+-1
(3)
=·exp(j2π+j2π)++
(4)
+1=+1·exp(j2π(+1)+j2π)++1
(5)
一般来说,信号或者杂波的强度远大于噪声的强度,在这里可以将其忽略,则上述信号可分别表示如下:
-1=-1exp(j-1)=-1·exp(-j2π)·
exp(j2π+j2π)
(6)
=exp(j)=·
exp(j2π+j2π)+
(7)
+1=+1exp(j+1)=+1·
exp(j2π)·exp(j2π+j2π)
(8)
显然,如果没有干扰信号的话,-1,和+1近似满足线性相位关系,同时,在这么短的时间内,幅度-1、、+1也可以认为近似满足线性关系,这是通过插值估算的理论依据。

(9)

(10)
2.4 实测数据的处理
将本文方法应用于上述实测数据,处理结果如图4所示。从图4可以看出,信号的幅度和相位更加平滑,脉间跳变基本消失,反映到频谱上,就是杂波区和噪声区更加明显,提高了目标的检测能力。
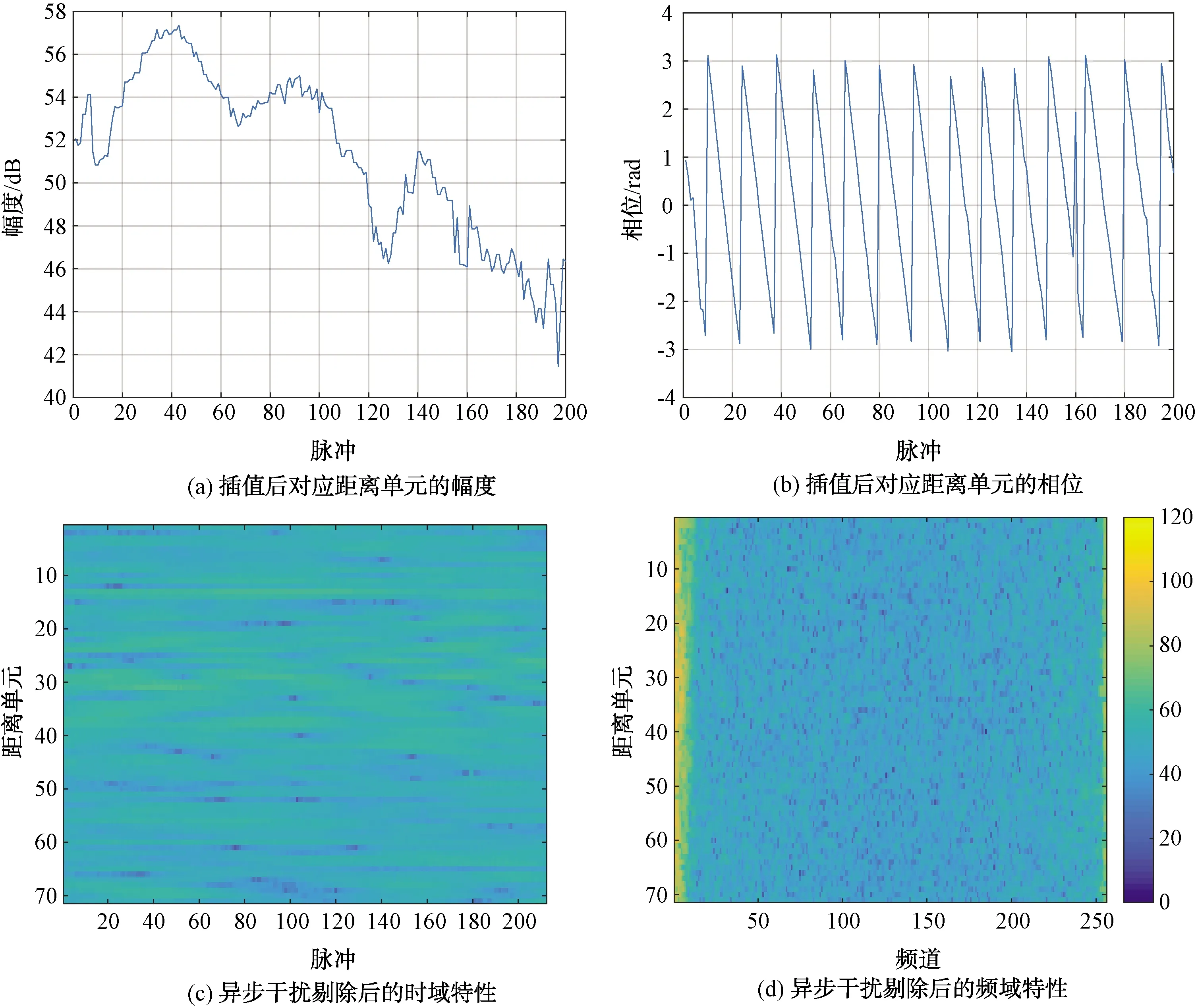
图4 干扰抑制之后的信号
3 结束语
本文提出了一种在频域自适应检测异步干扰,并进行干扰剔除的方法。由于在系统不存在干扰的波位或者距离单元,不需要插值运算,可大大降低系统运算量。同时,由于本文所提方法基本不依赖于雷达的应用场景,可应用于包括但不限于机载雷达的异步干扰抑制,而实测数据的处理结果则验证了本文所提方法的有效性。
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
振动工程学报(2019年2期)2019-05-13
通信产业报(2018年29期)2018-11-24
通信产业报(2018年40期)2018-01-22
移动通信(2017年3期)2017-03-13
物联网技术(2016年11期)2017-01-12
科学与财富(2016年18期)2016-12-22
科技与创新(2016年5期)2016-03-17
能源研究与信息(2015年3期)2015-11-18
科技与创新(2014年7期)2014-07-03