
一种基于比幅比相的测向系统设计
2022-05-07 00:32马友科易卫明李慧
计算机与网络 2022年6期
马友科 易卫明 李慧
摘要:针对无人直升机安装平台,需要对2~18 GHz频段内通信、雷达目标信号进行瞬时360°范围测向的问题,设计了一种基于比幅比相的测向系统。介绍了基于比幅比相测向系统的工作原理、设计与实现,对系统的组成、工作流程、软硬件设计进行了详细说明,对系统测向指标在外场进行了飞行测试。结果表明,测向系统测向精度在2°以内,达到了设计要求,在工程应用中具有很高的实用价值和借鉴意义。
关键词:比幅比相;8阵元测向阵;无人直升机
中图分类号:TN911文献标志码:A文章编号:1008-1739(2022)06-51-5
0引言
测向技术是电子侦察的关键技术,目标的方位信息是信号分选及引导干扰的重要参数。通过测向,可以实现对威胁目标辅助定位,从而为引导武器系统辅助攻击或实施有效干扰提供可靠依据。随着电子战技术的不断发展,对测向定位系统的性能要求越来越高,尤其针对中小型无人直升机等机载平台,要求其设备体积小、测向精度高、瞬时工作带宽大及空域瞬时全覆盖。
在目前的实际应用中,最常用的测向方式有比幅、干涉仪和空间谱等方法。比幅法[1]根据接收信号的相对幅度大小来确定信号的来波方向,技术成熟、设备简单,但是精度较低;比相法[2]测向精度高,但存在相位模糊的问题,需要多个基线解模糊,对多个基线通道的幅相一致性要求较高;空间谱测向[3]可以同时对多个信号测向,分辨力高、精度高,但对信号模型失真敏感,运算量较大,一般只用于窄带测向。
比幅測向和干涉仪测向各有其优缺点,但2种方法的结合能有效融合其优势。文献[4]采用曲线拟合及对雷达脉冲采样等技术提高比幅比相测向性能,但在实际工作中,还有虚警、漏警等问题需要解决。文献[5]采用长短基线和幅度信息,提出了划分幅度差门限设置滑动粗相位的方法解决比幅比相测向模糊问题,但有很多前提条件的限制,实际工程应用有一定局限性。文献[6]从理论层面对比幅比相的解模糊算法进行了改进,仿真实验取得了很好的效果,但未给出工程应用的实验结果。文献[7]对比幅比相测向体制接收机的原理、系统设计及解模糊处理做了详细的论述,但未给出接收机内部主要模块的详细设计。
以上几种方法都具有一定的优势,但总体上无法满足中小型无人机测向工程化的要求。本文结合测向系统装载平台的特点,针对2~18 GHz频率范围内的通信、雷达信号,介绍了一种装载于中小型无人直升机平台[8]、采用基于8阵元平螺天线圆阵[9]的复合测向体制———比幅比相测向体制,该设计实现了瞬时全方位、宽频带、高精度的宽带测向系统,在体积、重量、成本和复杂度等方面都有很大优势。
1主要工作原理
1.1比幅测向原理
比幅测向技术属于空域变换测向法中的空域方位—幅度变换法测向,这种技术可对单个脉冲进行测向,因此是一种瞬时测向技术,又可称为比幅单脉冲测向技术,对通信信号和雷达信号都可适用。
以2个天线为例,说明比幅测向原理。假定采用2个天线并列放置,相邻天线的振幅方向如图1所示,满足对称性。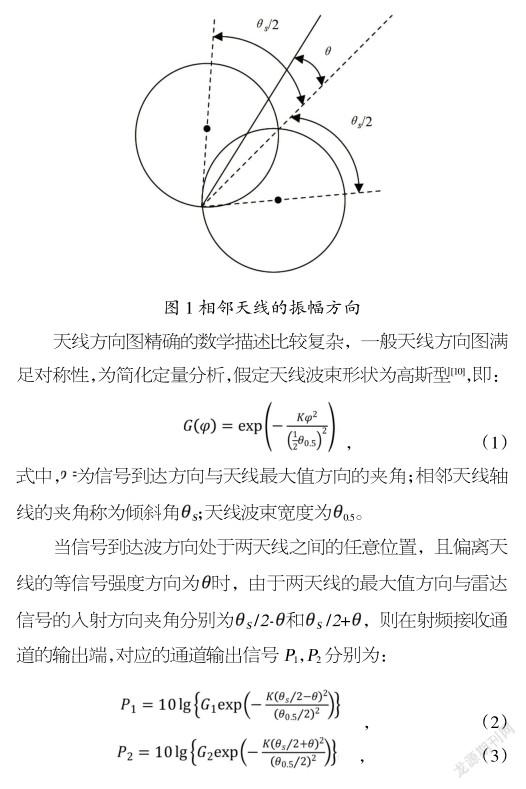
显而易见,采用比幅测向法时,天线数目越多,波束宽度越窄,测角精度和分辨力越高,在天线物理尺寸能完成组阵的情况下,高精度的多波束测向设备往往用几十个天线瞬时覆盖全方位。但是,由于每个天线都有独立的接收机,这样—来,测向精度要求越高,系统就愈加复杂。因此,本文采用波束比幅法[11]作为比幅比相中的比幅算法。
1.2比相测向原理
比相法主要有干涉仪和相关干涉仪2种方法。以单基线相位干涉仪为例,说明干涉仪测向原理[12],干涉仪测向如图2所示。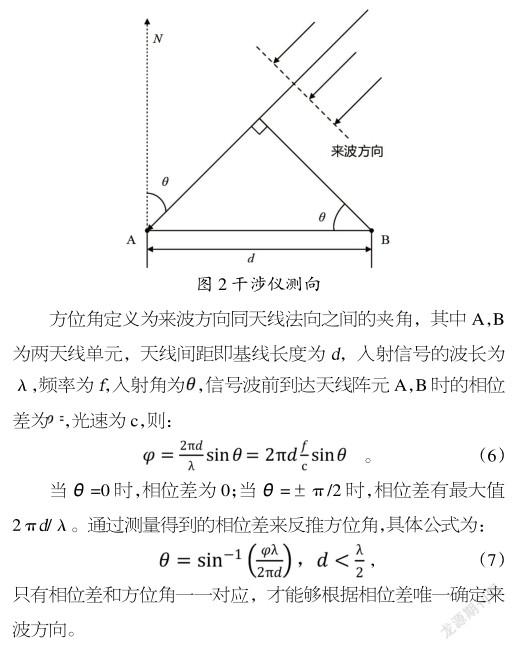
相关干涉仪是干涉仪的一种改进方法,通过比较获取的入射波相位分布与事先已存的各方位、各频率来波相位分布的相似性来得到入射波方向。由于采用了相关处理技术,相关干涉仪弱化了传统干涉仪中互耦、载体等对测向精度的不利影响。这些影响虽然还造成波阵面畸变和相位分布的失真,但这些影响是稳定的,由于这些失真已经存入样本数据中,通过相关处理,相关干涉仪实际上弱化了它们对测向精度的影响。
相关干涉仪测向原理[13]:给定频率,从某一方位角入射的信号,通过天线响应后会产生一组较为稳定的相位差数据,与方位角一一对应。对于任意频率,都有一张由相位差数据构成的二维表格,表格的每一行对应一个方位。在误差范围内,外界入射信号产生的相位差会真实地再现表内某一方位对应的相位差数据。对于一个实际目标信号,系统测量出一组相位差,将这一组值和系统原始相位样本进行相关处理,计算出它们的相关系数,相关系数的最大值对应的方位角就是目标信号的方位值。本文采用相关干涉仪作为比幅比相中的比相算法。
1.3比幅比相测向工作原理
比幅比相测向原理的实质是利用比幅测向得到的目标信号的粗方位,解决比相法测向的模糊问题[14],然后选取接收目标信号幅度最大的4个天线对应的处理通道,利用相关干涉仪测向以保证测向精度,实现目标信号的高精度测向。
采用比幅比相的测向体制,可以综合比幅测向体制和相关干涉仪测向体制各自的优点,既能保证获得高精度的测向性能指标,又能大幅度降低设备量和成本,降低研制难度。
2系统设计与实现3FEEDAA8-1D6A-4998-90E7-C874607A3D30
2.1系统设计
测向系统总体设计原理如图3所示。为保证8路侦收信号幅相特性一致,从天线阵元一直到侦察测向处理机中的模数转换,8路射频通道的各通道射频信号经过的射频线缆长度、放大器、分路器等电路设计都保持严格一致。
测向天线阵是由8个方向图基本一致的2~18 GHz平螺天线[15]组成的均匀圆阵,相邻两天线的法线夹角为45°,天线阵实现方位360°空域覆盖。一个全向天线用于频谱监测。
开关阵[16]完成实际接收信号和自校信号的切换选择,以及在不同工作模式下對实际接收信号的直通、放大或衰减等处理。开关阵中的放大器选用低噪声放大器,用以补偿线路衰减和获得较低的系统噪声系数。
8路射频经滤波、分路、放大等处理后分为2组射频信号,1组8路2~6 GHz的通信测向射频信号,1组8路2~18 GHz的雷达测向射频信号。
侦察测向处理机采用17槽的LRM机箱,包含PPC主板模块、本振模块、通信变频模块、雷达变频模块、信号采集模块、信号处理模块、单比特接收机模块、大容量存储模块和电源模块等。
侦察测向处理机主要完成2~18 GHz频段内雷达和通信信号的检测、分析、校准信号产生,8路雷达测向射频信号和8路通信测向射频信号主要完成下变频、滤波放大、中频信号同步模数转换、幅相校准、计算并输出信号的方位及其他参数信息等。其中,雷达信号测向最大瞬时工作带宽1 GHz,通信信号测向最大瞬时工作带宽300 MHz。比幅比相测向系统的工作流程如图4所示。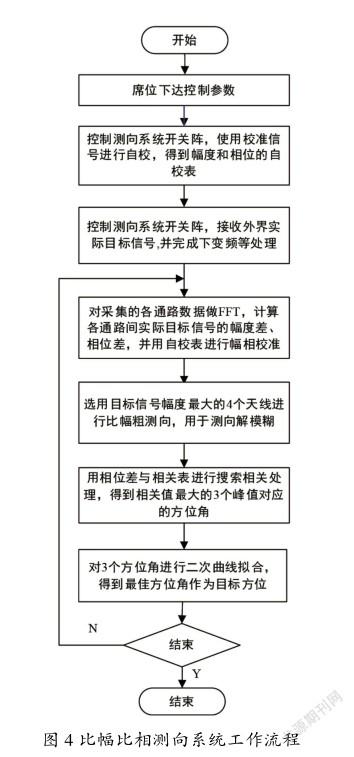
2.2处理机软硬件设计
侦察测向处理机内各硬件模块采用标准LRM结构,其中最核心的模块是信号采集模块和信号处理模块,侦察测向处理机核心模块如图5所示。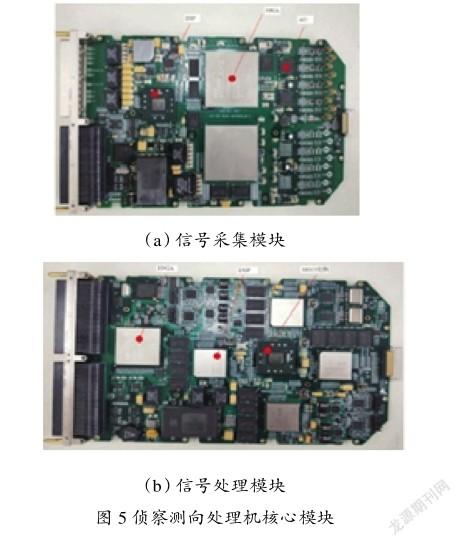
信号采集模块板卡主要包括4片高速采样AD9208芯片、2片大规模可编程的FPGA芯片、一片高性能多核DSP芯片、一片SRIO数据交换芯片、还有一片MCU芯片完成采样器配置和健康管理等,FPGA和DSP程序可实现动态加载和在线烧写。信号采集模块主要完成8路通信中频信号和8路雷达中频信号的幅相校准、同步采集和数字下变频、FFT等处理,并将过门限信号的幅度和相位差、单信号窄带时域数据送至信号处理模块。
信号处理模块主要由一片MCU芯片、一片大规模可编程的FPGA芯片、3片高性能的多核DSP芯片和一片SRIO总线交换芯片等组成。信号处理模块完成一路宽带搜索多信号测向和5路窄带单信号测向等处理,测量出信号的来波方向,并实时输出各信号的示向度、场强值。
测向软件的通信信号测向包括普通宽带测向、宽带突发/跳频测向及窄带测向。普通宽带测向时仅对带内幅度谱过门限峰值点测向,宽带突发/跳频测向时需根据门限对突发/跳频信号测向,窄带测向时只测带内幅度最大点。测向实现方式包含累积和非累积2种模式,对定频连续信号做累积可以提高信噪比,即可以提高测向灵敏度;在测向结果用于对高速跳频引导干扰时,不用累积模式。
测向软件的雷达信号测向主要是脉冲信号的测向,在脉冲信号持续时间内进行累积。侦察测向处理机测向处理由信号采集模块、信号处理模块上的FPGA和DSP配合完成,FPGA主要实现AD芯片的高速接口、数字信道化、多路FFT或各路间脉冲数据的相关处理,得到频谱幅度及各通道相位差;DSP主要实现指令交互、流程控制、比幅比相测向算法。测向软件实现原理如图6所示。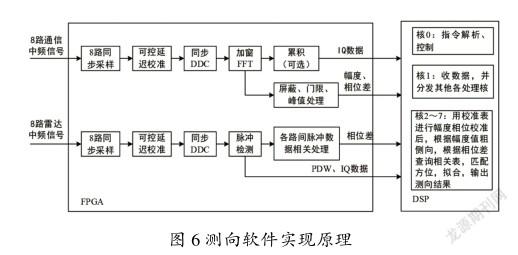
2.3系统试验
本文将系统在微波暗室环境下进行了大量测向性能测试后,集成安装在无人直升机平台上,在外场授权飞行空域内,对测向系统进行了测向性能的飞行测试[17]。
预先布设精确位置已知的3个信号源,无人直升机升空后,分别在指定位置对3个信号源进行方位测量,上报测向结果信息(真北方位),并与通过GPS位置信息计算出的方位真值进行比较和数据处理,计算方位误差。飞行测试的通信信号测向误差和雷达信号测向误差,在剔除一个误差最大值后,记录分别如表1和表2所示,可得通信信号(2~6 GHz)测向误差为1.92°,雷达信号(2~18 GHz)测向误差为1.61°,测向误差满足测向精度<2°的系统指标要求。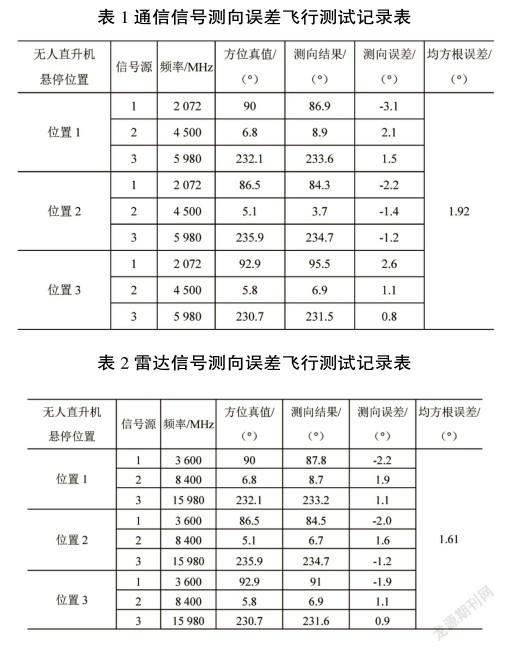
3结束语
受无人直升机平台的设备安装空间限制[18],8阵元测向天线阵与其他频段的测向天线阵层叠安装在一个天线罩内,层间距较小,在微波暗室及外场的飞行试验中都发现其他频段天线阵对8阵元测向天线阵形成了多径干扰[19],导致某些频点的测向结果出现畸变、精度差。后续将从两方面入手解决,一是需要深入研究先多径抑制再测向的算法,解决多径干扰造成的测向精度降低的问题;二是将2~18 GHz的平螺天线阵分成2~6 GHz平螺天线阵和6~18 GHz喇叭天线阵,提升6~18 GHz频段天线的增益,降低其他频段天线的影响[20],提升系统的测向能力。
基于比幅比相测向体制设计的测向系统具有测向精度高、灵敏度高、结构合理、体积小等优点,在工作中稳定可靠,其性能指标能够满足无人直升机等多种平台的使用要求,在工程应用中具有很高的实用价值,可以推广到诸如车载、舰载等平台上使用。3FEEDAA8-1D6A-4998-90E7-C874607A3D30
参考文献
[1]吴帅君.基于机载平台的无线电测向技术研究与应用[D].兰州:兰州交通大学,2017.
[2]赵小华,梁广真.干涉仪测向技术研究[J].舰船电子对抗, 2016,39(3):7-10.
[3]陈旗,黄高明,宋士琼,等.基于空间谱估计的测向技术[J].火力與指挥控制,2010,35(8):41-44.
[4]刘洪艳,郜丽鹏,司锡才.比幅比相测角系统信号处理技术研究[J].应用科技,2003,30(10):7-9.
[5]张文旭,郜丽鹏,张春杰,等.一种基于比幅比相测角解模糊方法[J].应用科技,2006,33(4):21-23.
[6]姚志成,吴智慧,杨剑,等.基于相关比幅测向的圆阵干涉仪解模糊算法[J].电讯技术,2020,60(1):33-39.
[7]张学成,居易.基于比幅比相测向法的宽带接收机的设计与实现[J].船舶电子对抗,2018,41(4):86-89.
[8]温德宏.无人直升机任务能力及使用方式分析[J].直升机技术,2020,1:57-61.
[9]杨洪亮.基于均匀圆阵的测向算法研究[D].西安:西安电子科技大学,2014.
[10]翟庆伟,王玉,宫兵.波束比幅法测向技术研究[J].无线电通信技术,2007,33(6):55-56.
[11]陈旭,糜坤年.多波束比幅测向系统测向误差分析[J].舰船电子对抗,2019,42(2):35-38.
[12]李东虎.干涉仪测向系统中的基线配置技术[J].无线电工程, 2014, 44(4):17-19.
[13]王济.基于多核DSP的短波宽带测向算法及实现技术研究[D].成都:电子科技大学, 2017.
[14]焦玉龙,王玉林,焦小炜,等.Ku频段的一种高精度测向模型[J].无线电工程,2012,42(7):23-24.
[15]刘爱军,毛兴鹏,吴华明,等.平面螺旋天线圆形阵列及其测向性能研究[J].科学技术与工程,2010,10(9):2088-2093.
[16]温明艳.一种高性能多路射频交换矩阵的设计与实现[J].无线电工程,2019,49(8):720-723.
[17]胡满玲.机载电子侦察设备测向性能评估[J].电子测量技术,2010,33(8):25-27.
[18]张鸿喜,韩伟.安装环境对电子侦察比幅测向精度的影响分析[J].海军工程大学学报,2020,32(1): 89-94.
[19]史鉴,钟文.多路径效应对侦察测向的影响[J].舰船电子对抗,2019,42(3):26-29.
[20]白春惠.测向天线阵互耦效应分析[J].无线电工程,2011,41(10):40-43.3FEEDAA8-1D6A-4998-90E7-C874607A3D30
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国计算机报(2019年19期)2019-06-25
移动通信(2019年2期)2019-03-27
发明与创新·大科技(2018年2期)2018-03-17
CHIP新电脑(2016年7期)2016-07-18
科技视界(2016年10期)2016-04-26
小学生时代·大嘴英语(2015年7期)2015-11-23
智慧与创想(2013年5期)2013-06-25
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16
