水下升降式准实时通信潜标控制系统研制
2022-06-22 03:05胡贺岗陈永华刘庆奎
海洋科学 2022年5期
胡贺岗 , 陈永华 , 于 非 , , 刘庆奎 王 蓓
(1. 中国科学院海洋研究所, 山东 青岛 266071; 2. 中国科学院大学, 北京 100049; 3. 中国科学院海洋环流与波动重点实验室, 山东 青岛 266071; 4. 中国科学院海洋大科学研究中心, 山东 青岛 266071; 5. 青岛海洋科学与技术试点国家实验室 海洋动力过程与气候功能实验室, 山东 青岛 266237)
潜标是海洋环境监测中最可靠、最准确的手段之一, 在应用海域范围、观测数据质量以及海上军事监测和预警上具有显著优势, 可为深海动力环境预报与海洋军事环境保障提供资料支撑[1]。随着我国国家级海洋战略的实施以及一带一路战略的推进, 海洋环境监测成为海洋研究与开发的重要内容和重要保障措施之一[2], 在海洋科学研究、经济建设及国防安全等领域对实时海洋环境感知能力提出了迫切需求[3]。
目前海洋资料的获取有卫星、浮标、潜标和科考船只、水下滑翔机等观测方式[4-6], 而实现次表层海洋的长期、连续、定点、低成本的观测难度都非常大, 其主要原因是缺乏兼顾实用性、经济性、稳定性和防生物附着的观测手段和设备[7]。目前对次表层海洋剖面要素观测方式中, 链式剖面观测的成本高昂, 无法进行大规模普及, 水下滑翔机定点观测续航性不足, 仍旧无法取代传统潜标, 基于剖面升降的观测设备尚未见到成熟的产品化应用[3,8-13]。综合考虑多种垂直剖面要素观测方式的优劣以及国家对海洋环境监测任务的需求, 本文采取了基于潜标的剖面观测方式, 研制了一套水下升降式准实时通信潜标,并提出了一种可以进行上层海洋垂直剖面要素连续观测和数据的准实时传输的控制系统设计方案。
如图1所示, 该型潜标主要包括垂直升降装置和水下驱动装置两大部分。水下驱动装置悬浮于水面下一定深度或者坐底于海底, 水下驱动装置释放通信缆,垂直升降装置在浮力的作用下缓慢上浮, 在上浮期间利用搭载的传感器连续进行剖面数据的采集与存储,到达海面后通过通信装置将获取的数据以无线通信的方式发送到岸基服务器, 实现垂直剖面要素的连续观测与数据的准实时传输, 通过建立潜标与服务器之间的双向通信协议, 实现对数据的补发和对潜标的远程控制。数据传输完毕后, 垂直升降装置下潜到水面下进行休眠以降低功耗。该方案具有一定的隐蔽性,能够降低潜标受到人为和自然破坏的可能性, 同时由于水面下光强较弱, 且剖面传感器采用了国家海洋技术中心抗污染CTD[14], 能够大幅减小生物附着问题对仪器设备造成的负面影响, 从而实现长期、连续、定点、低成本的上层海洋剖面观测。
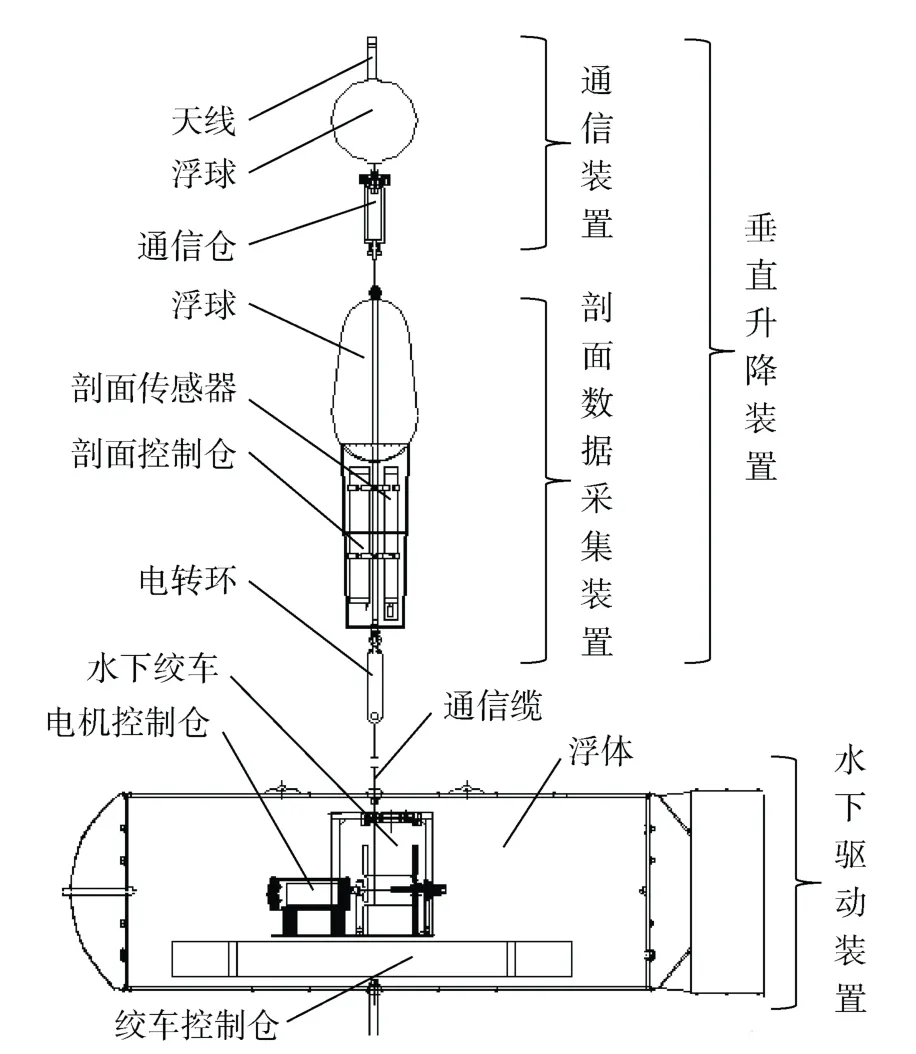
图1 水下升降式准实时通信潜标组成部分示意图Fig. 1 Diagram of quasi-real-time communicating underwater winch buoy’s components
1 硬件设计
潜标控制系统硬件设计采用了自上而下的模块化设计思路, 将潜标各个控制部分归类为特定的功能模块, 简化了各个模块之间的连接和通信方式,使得系统升级换代或模块更换以后仍具有较好的兼容性和扩展性。
1.1 垂直升降装置控制系统硬件设计
垂直升降装置分为两个部分, 分别是通信装置和剖面数据采集装置。通信装置硬件设计上主要由GPS模块和无线通信模块和转换电路组成。GPS模块的作用一方面是进行定位, 另一方面是给控制系统进行校时; 无线通信模块可以根据需求进行更换, 在近海区域可以采用CDMA模块或4G通信模块进行数据传输,成本非常低, 在远海则可以使用铱星通信模块, 但是通信费用较高; 转换电路将CDMA模块、4G模块以及铱星通信模块都转换成了具有统一通信标准和输入电压的接口, 方便通信装置的维修与更换。
剖面数据采集装置控制系统硬件设计如图2所示, 主要由电池组、DC-DC电源模块、温度深度(temperature depth, TD)传感器、485通信模块、MCU、SD卡、电源管理部分和外部传感器等组成。电池组选用的34615型一次性锂电池能量密度是常规可充电锂电池的3~5倍, 容量达到42 Ah, 能够满足潜标对电池容量的需求; DC-DC降压模块采用了工业级MP1584降压芯片, 输入电压达到28 V, 输出电压为5 V, 最大输出电流为3 A, 静态电流约100 µA, 满足控制系统功耗需求; TD传感器采用国家海洋技术中心SZC17-TD型号传感器[15], 功耗低、体积小、可直接通过串口获取温度和压力数据, 其技术指标见表1; MCU1与MCU2均采用了意法半导体公司生产的STM32F103RET6单片机, 包含5个串口通信接口,支持SPI、I2C、USB等通信方式, 具有64 KB RAM和512 KB FLASH, 主频最高可达72 MHz, 能够满足潜标计算任务需求; SD卡使用了闪迪Micro SD卡,容量为4 GB; 电源管理部分则是以P沟道金属氧化物半导体场效应晶体管(metal-oxide-semiconductor field-effect transistor, MOSFET)作为固态开关对TD传感器、485模块、SD卡、外部传感器等进行通断电的管理控制的总称。
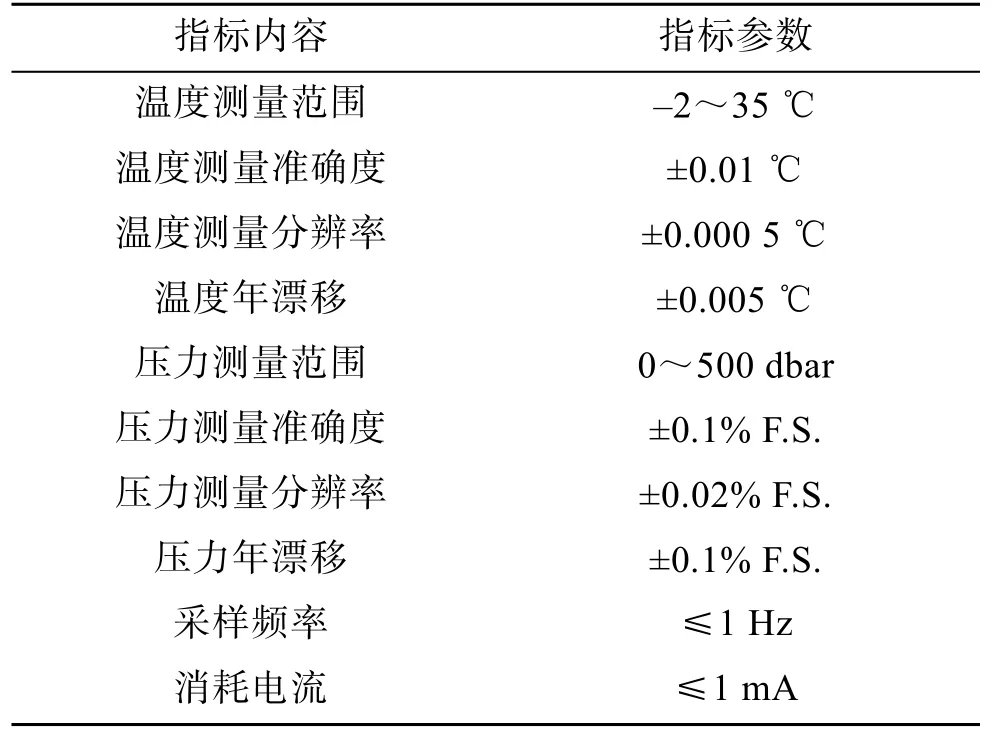
表1 SZC17-TD传感器技术指标Tab. 1 Technical parameters of SZC17-TD sensor
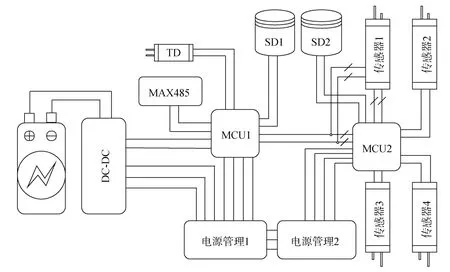
图2 剖面数据采集装置控制系统硬件设计示意图Fig. 2 Schematic of the hardware design of a profile data acquisition device control system
剖面数据采集装置电路上设计有2片MCU、2片SD卡和2处电源管理部分。其中MCU1作为主控制单元, 直接控制SD1、电源管理1和MCU2, MCU2作为副控制单元, 只控制SD2、电源管理2和所搭载的传感器。工作时, MCU2将所有传感器读取到的数据存储到SD2当中作为原始数据的备份, 之后将这些数据通过串口通信的方式发送到MCU1, MCU1将数据存储到SD1中。如果剖面数据采集装置只搭载一台传感器, 那么可以将其连接到传感器1的接口,直接通过跳线连接到MCU1, 就可以忽略掉MCU2、SD2和电源管理2的电路部分, 极大简化了剖面数据采集装置的硬件连接。
1.2 水下驱动装置控制系统硬件设计
水下驱动装置控制系统硬件设计如图3所示, 主要分为水下绞车控制系统与BLDCM控制系统两部分,主要由电池组、DC-DC电源模块、TD传感器、485通信模块、MCU、SD卡、电源管理部分、ADCP接口、电流电压监测器、全桥逆变电路、BLDCM等组成。电池组采用了34615型锂电池, 以7串54并方式进行连接, 电压25.2 V, 电量为756 Ah; DC-DC模块采用MP4462降压芯片, 输入电压最高为36 V, 输出5 V,最大输出电流为3.5 A, 静态电流120 µA; ADCP接口可搭载中国科学院声学研究所研制的ADCP[16-18], 可通过串口将ADCP唤醒, 读取最新测得的海流数据;电流监测芯片采用了ACS712-20芯片, 量程为±20 A,它通过霍尔效应将电流信号直接转换为模拟电压信号对外输出, 精确度达到1.5%; 电压监测直接使用分压电阻接入MCU内置的模数转换器(analog to digital converter, ADC)进行转换; 全桥逆变电路采用3片IR2101半桥芯片和6片N沟道IRF1405型MOSFET,MOSFET最大导通电流169 A, 远远超出电机额定电流, 能够有效解决功率芯片在密闭空间散热不足的问题; BLDCM额定电压24 V, 额定功率200 W, 满足潜标剖面运动的功率需求。其余部分与剖面数据采集装置硬件设计基本一致, 这里不再赘述。
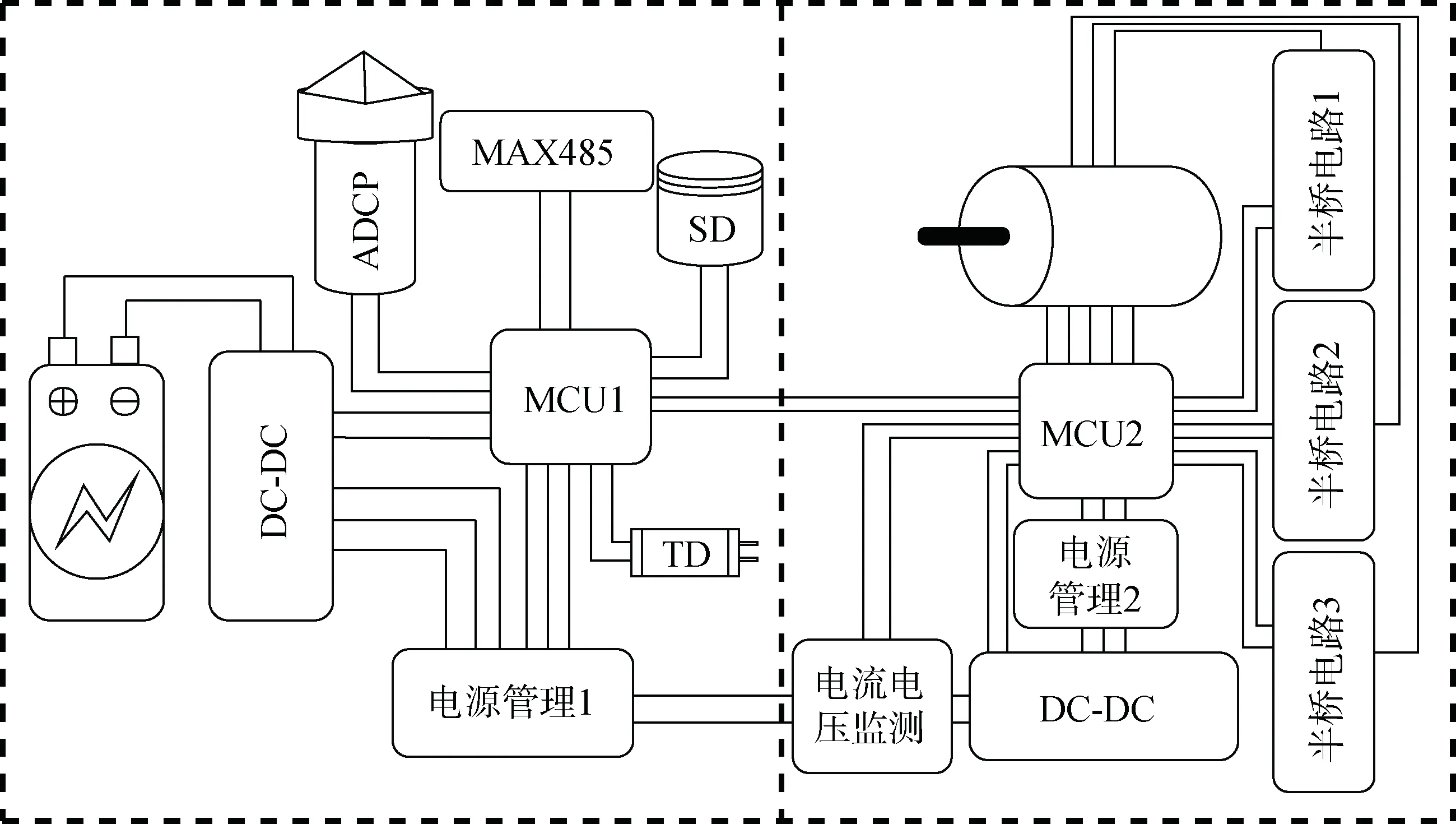
图3 水下驱动装置控制系统(左: 水下绞车控制系统; 右: BLDCM控制系统)硬件设计示意图Fig. 3 Schematic of the hardware design of an underwater driving device control system (left: underwater winch control system;right: BLDCM control system)
2 工作流程
一套可靠完善控制系统是确保潜标进行正常工作的保障, 在实际应用中总会出现各式各样的意料之外的情况, 比如传感器损坏、通信故障、电机堵转等等问题, 因此软件设计上需要充分考虑潜标各个部分所有可能发生故障情况并建立一定的应对措施。
2.1 剖面数据采集装置控制系统工作流程
考虑到潜标在海面受到风、浪、船只以及人为破坏的可能性比较大, 且在水面下光强较弱, 能够在一定程度上减小生物附着问题, 因此设计方案优先考虑将潜标整体均潜伏于海面下一定深度, 只有在通信时才会浮出水面。如图4所示, 剖面数据采集装置控制系统工作流程主要有启动模式、上浮/下潜模式、通信模式和低功耗模式。启动模式下控制系统首先进行初始化, 再进行参数配置, 从SD卡读取并设置潜标的工作周期、剖面运行深度、设备编号、传感器类型、服务器IP地址和端口等参数。随后根据启动方式的不同从而执行不同的任务, 如果是上电重启, 即人为的启动潜标, 则先进行潜标各项功能的检查, 包括存储器测试、水下驱动装置通信测试、水下电机测试, 传感器测试、GPS测试、远程通信测试等等工作, 在潜标布放完毕后, 系统进行重启, 随后进入上浮模式。
上浮模式与下潜模式流程基本相同, 这里仅对上浮模式展开论述。潜标在上浮模式首先通过通信缆唤醒水下驱动装置, 然后开启携带的传感器记录数据, 同时控制水下驱动装置释放通信缆从而缓慢上浮。由于潜标布放后在海上无人值守, 控制系统需要考虑到可能出现的各种故障现象, 如传感器故障或者水下驱动装置故障等等, 当出现故障时控制系统将自动进入下一工作模式, 确保程序不会在一个地方卡死, 必要时将会自动进行系统重启。
通信模式下, 选用的通信模块不同, 控制系统的具体控制步骤也有不同, 整体上按照图4中所示首先开启通信模块进行配置, 再进行数据的发送,然后接收由岸基服务器发送的指令, 最后再进行GPS定位与校时。受海上应用环境影响, 通信常常出现中断, 为了提高服务器数据获取率, 需要建立双向通信协议和数据补发机制, 并开发相应的服务器接收软件。
当剖面数据采集装置下潜到预定的深度后, 将设定闹钟进入低功耗模式, 在低功耗模式下, 系统将关断图2中除DC-DC模块和MCU1模块外的所有外围设备的电源, MCU1将系统各项参数保存到SD卡以后也进入待机模式, 此时剖面控制系统待机电流为0.76 mA, 年待机消耗电量约为6.66 Ah。考虑到海流增长与消退引起潜标姿态和浮体深度变化等问题, 控制系统会在低功耗模式下多次唤醒, 检查是否出现了上浮迹象, 如果没有异常便会再次进入低功耗模式, 否则便先下潜到预定的深度再进入低功耗模式。
2.2 水下驱动装置控制系统工作流程
2.2.1 水下绞车控制系统工作流程
水下绞车控制系统系统工作流程如图5所示, 系统上电后首先进入一分钟倒计时的睡眠模式, 该模式下既可以降低功耗, 又可以完整接收串口指令。如果在倒计时一分钟内未收到任何指令, 控制系统将关闭图3中除DC-DC模块和MCU1模块外的所有外围设备的电源进入待机模式, 此时待机电流约0.86 mA,年待机消耗电量约7.53 Ah。当潜标开始工作时, 剖面数据采集装置通过通信缆将水下驱动装置进行外部唤醒, 水下绞车控制系统开始启动, 当接收到开始工作的控制指令时便开启BLDCM控制系统。

图5 水下绞车控制系统工作流程Fig. 5 Program flowchart of an underwater winch control system
启动BLDCM控制系统之后, 水下绞车控制系统主要有两项任务, 一项任务是接收剖面数据采集装置发出的控制指令、调整工作时间、发送电机控制指令、解析BLDCM控制系统状态然后对主机进行反馈, 另一项任务是监测电压、电流、工作时间和工作状态。这两项任务以中断函数的方式并行执行,其中任何一个任务当中出现异常状况时都可直接使水下绞车控制系统及时切断BLDCM控制系统电源,实现软件上的对水下驱动装置的保护。控制系统工作完毕后再次进入到睡眠模式并进行倒计时, 最终在计时完毕后进入待机模式。
2.2.2 BLDCM控制系统工作流程
BLDCM控制系统工作流程如图6所示, 系统上电以后, 如果串口接收到开始工作的指令就初始化控制参数然后开始工作, 否则进入睡眠模式进行等待。BLDCM控制系统开始工作以后主要有5个任务, 分别是主控制任务、定时器任务、脉宽调制(pulse width modulation, PWM)任务、串口任务和ADC任务。主控制任务负责监测/计算电压、电流、电机状态、电机最小转速、控制系统工作状态等; 定时器任务负责对电机工作时间进行倒计时; PWM任务实时计算电机转速并调节PWM脉宽输出; 串口任务负责接收和解析水下绞车控制系统发送的指令并向其反馈当前电机状态; ADC任务一方面负责计算电压和电流, 另一方面是当检测到电路突然掉电时,在最短的时间内将电机参数写入到Flash, 避免其掉电丢失。
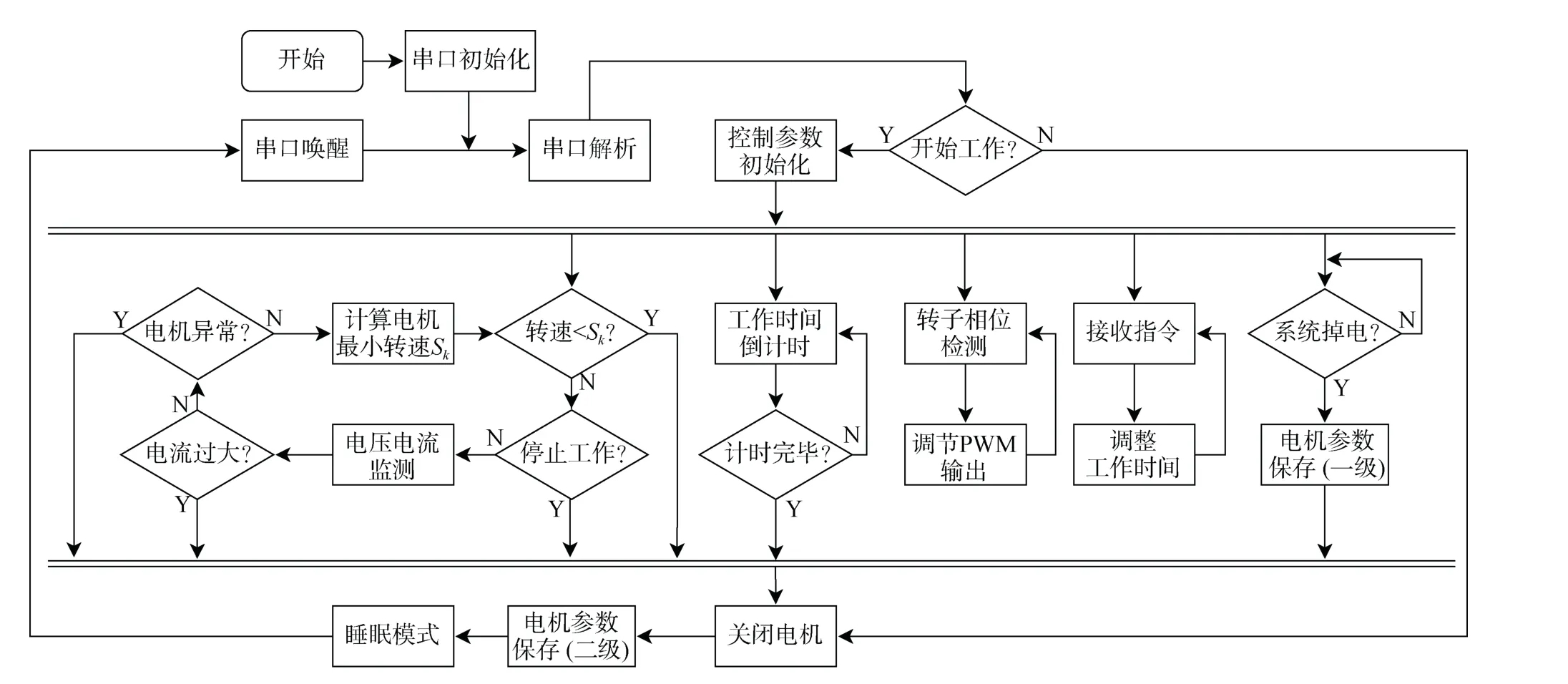
图6 BLDCM控制系统工作流程图Fig. 6 Program flowchart of a BLDCM control system
正常情况下BLDCM控制系统会在电机完全关闭后, 将电机参数写入到内部Flash中进行保存, 这一过程约占时500 ms, 而当控制系统意外掉电时,通过示波器观察到电路电压从24 V降低到5 V有约10 ms的掉电时长, 因此无法通过正常的方式及时保存电机参数。为了解决这一问题, 本文提出了两级参数保存制, 即赋予ADC线程最高优先级, 当监测到控制系统意外掉电时立即将电机参数进行保存, 耗时仅约1 ms, 然后将正常的参数保存过程优先级设为最低, 在控制系统重新启动时, 就可以根据优先级顺序恢复电机参数。
3 堵转检测方案
海上环境复杂, 当因卡入异物出现电机堵转时,对水下绞车的保护是极其关键的。传统针对电机的堵转检测基本上都是基于监测电流大小的方案, 如利用保险丝、硬件或软件电流监测等方法[8-9,11,13,19],这些方法简单实用, 能够充分保护电机不会烧毁,但是应用在水下驱动装置时存在两个问题, 一个问题是电机经过行星减速齿轮后输出的力矩非常大,基于监测电流的方案在实际应用中发现并不灵敏,很多情况下电流阈值是出于经验选定的, 虽然保护了电机但是并不能充分保护水下驱动装置的机械结构不被破坏。另一个问题是由于电机低频换相过程以及高频脉宽调制的影响, 电流信号的噪声非常大,其起伏幅度已经超过了平均电流的大小, 即使对电流信号进行滤波, 效果仍不明显, 且存在时间上的滞后性。
本文提出了一种基于监测电机转速的堵转检测方案: 假设电机转速S=f(U,D,M), 其中U是系统电压,D是PWM脉宽占空比,M是作用在电机转轴上的转矩。可以理解,S应当与U、D呈正相关, 与M呈负相关, 对电机的堵转保护实质上是当电机的转矩大小超过一定阈值时便可认为发生了堵转。考虑到水下驱动装置通过通信缆来拉动剖面数据采集装置, 那么完全可以假设当通信缆上的拉力超过两倍正常拉力大小时即认为是堵转, 可以在实验室测定两倍拉力大小下的电机转速Sk, 然后再将电机转速S与Sk进行比较来判断是否出现拉力过大的情况。两倍拉力大小下, 可认为M为定值, 则只需确定Sk与V、D的函数关系Sk=fM(V,D), 下面利用经验公式对该函数关系进行拟合。
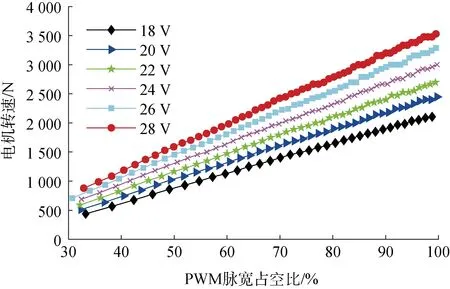
图7 不同电压下电机转速随PWM脉宽占空比的变化Fig. 7 Rotate speed of motor changes with PWM output duty at different voltages
首先测定剖面数据采集装置净浮力, 然后在实验室将水下驱动装置加以净浮力两倍的恒定拉力,接着调整供电电压启动电机, 将PWM脉宽占空比与电机的转速记录下来并进行二次函数拟合, 然后调整供电电压并记录数据再次拟合, 最终得到了在不同电压下电机转速与PWM脉宽占空比的函数关系模型:
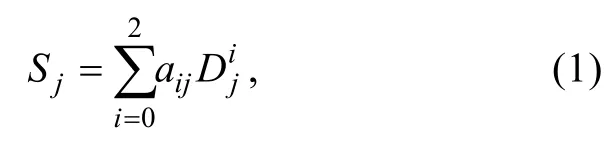
其中Sj表示第j次测试得到的电机转速,aij是拟合系数矩阵a中第i行、第j列的元素,i表示拟合幂次。按照同样的方式将系数矩阵a对系统电压再次进行拟合:
其中aij是矩阵a中第i行、第j列的元素,bik是拟合系数矩阵b中第i行、第k列的元素,k表示拟合幂次,Uj表示第j次测试得到的系统电压, 经拟合可得到3×3系数矩阵b。在实际工作时, 根据当前系统电压和PWM脉宽占空比作为输入参数, 利用拟合系数矩阵b计算电机转速阈值Sk, 如果当前电机转速小于Sk, 则可以判定此时属于堵转情况, 立即停止电机以保护水下驱动装置。
图8所示是电机转速实测数据与模型计算的数据之间的相对误差, 占空比小于30%时误差较大不予考虑, 当脉宽占空比在30%~40%时, 模型计算出的Sk与实际测量得到的数据相对误差约在4%以内,当占空比超过40%, 两者相对误差在2%以内。为实现电机动力输出效率最大化, 正常情况下PWM脉宽占空比最大值一般选在70%~75%左右, 因此能够很好的检测电机堵转的情况。
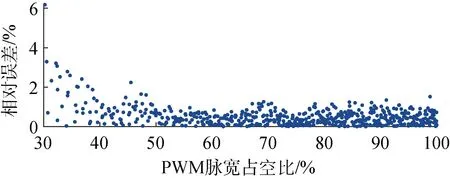
图8 电机转速实测数据与模型计算数据相对误差Fig. 8 Relative error between measured and calculated data of motor rotation speed
基于监测电机转速的堵转检测方案具有如下优点: (1) 准确度高: 电压信号比电流信号的信噪比更小; (2) 反应速度快: 模型的输入参数是可以直接获取的, 无需繁琐的步骤便可直接计算电机最小转速Sk。在实际应用中, 可将基于监测电流的方案和基于监测电机转速的方案共同使用, 提高对水下驱动装置的保护能力。
4 服务器远程接收软件设计
海上通信常常发生中断, 为了提高服务器数据获取率, 需要建立数据补发机制, 这就要求必须建立双向通信协议, 开发服务器接收软件。如图9所示,本文以Visual Studio 2019为开发平台, 开发出了一套服务器接收软件。软件兼容CDMA模块、铱星通信模块和4G通信模块的通信协议, 并自动过滤协议相关内容, 保留原始格式的数据信息, 将数据完整存储到本地文本文档和数据库当中。
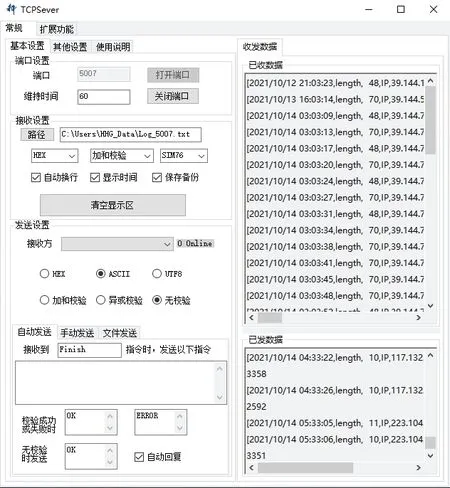
图9 服务器接收软件界面Fig. 9 Interface of the server’s data receiving software
与服务器建立通信必须按照一定的协议进行握手, 铱星模块自带通信协议, 潜标和服务器接收软件只需按照协议通信即可; 对于CDMA通信模块或4G通信模块, 模块进行连接时, 潜标首先发送握手消息,握手成功后再进行通信, 其通信协议如表2所示。

表2 服务器接收软件通信协议Tab. 2 Communication protocol of the server’s data receiving software
潜标发送的数据包包含设备编号、文件号、数据包号、数据和校验位信息, 其含义如下: 设备号即每台设备单独的编号, 最大不超过255; 与文件号对应的是潜标的运行次数, 由于通信模块一次性最大发送数据量有长度限制, 因此潜标每次唤醒都会新生成一个数据文件, 避免数据文件过于庞大; 数据包号的高4位指的是当前数据文件的总数据包的数量, 低4位是当前数据包的编号, 当数据文件长度超出通信模块最大发送长度时, 就把数据文件截断成多个数据包,后期根据文件号和数据包号来进行拼接; 数据包从第5字节一直到第n–2字节(n是数据包总字节数)是潜标获取的数据, 其长度和内容并不固定; 数据包最后两字节是加和校验位, 高位在前低位在后。
服务器接收软件会根据数据包校验位自动向潜标回复校验结果, 若潜标接收到校验失败的消息或者没接收到任何消息, 都会再次发送该数据包, 重复发送数据的次数不超过3次, 否则认为通信失败,并在下个潜标周期进行通信时把此前未能发送成功的数据文件进行补发。
在建立了双向通信的基础上, 本文提出了远程修改潜标工作参数的方案。依照此通信协议, 服务器接收软件实现了对潜标工作周期、唤醒周期、升降深度、升降速度、采样深度间隔等数十项潜标工作参数的远程修改, 具有很强的应用扩展性。
5 系统测试
为验证本文所述潜标的各项性能与控制系统稳定性, 经过对潜标的结构以及搭载的仪器设备进行调整, 在近海和远海进行了多次海上试验。
图10所示为2019年8月在山东威海褚岛海域进行的海上试验中获取的剖面CTD部分数据。潜标结构为半潜式结构, 在浮力材料的作用下悬浮在距水底10 m左右距离。潜标累计运行76 h, 高频次累计进行了163次剖面观测, 获取了43 005条CTD数据, 数据接收的完整率达到98.16%, 初步验证了潜标控制系统的可行性与稳定性。
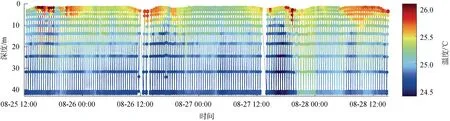
图10 2019年威海海试潜标剖面CTD部分数据Fig. 10 Partial CTD data of underwater winch buoy of Weihai investigation in 2019
搭乘“向阳红19”号科考船, 该型潜标于2020年5月21日成功布放于西太平洋海域进行试验, 并于5月28日成功进行了回收, 布放点水深约5 500 m左右。潜标搭载剖面CTD 1台, 国家海洋技术中心研制的感应耦合式传感器10台[20-21]、中国科学院声学研究所研制的75 kHz ADCP 1台。图11所示为海上测试期间获取的剖面CTD的部分数据。经统计,服务器共接收到339组数据, 其中有15组重复数据,潜标共运行333个完整观测周期, 服务器数据获取率达到97.3%。数据中可以看到, 受到海流的影响,水下驱动装置和垂直升降装置的深度会上下起伏,起伏深度超过了100 m。当强流出现时, 两者均出现下压现象, 水下驱动装置释放通信缆也无法使垂直升降装置上浮到海面, 而当海流减弱时, 通信缆发生松弛, 仍旧无法正常进行剖面升降运动。
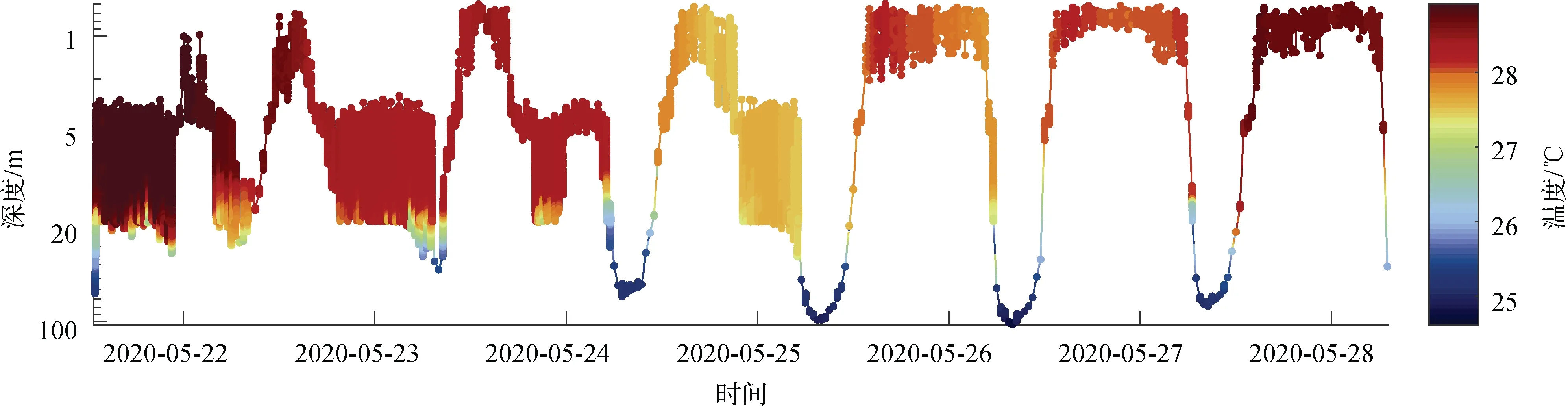
图11 2020年西太平洋海试潜标剖面CTD部分数据Fig. 11 Partial CTD data of underwater winch buoy of West Pacific Ocean investigation in 2020
2020年11月20日, 搭乘“向阳红14”号科考船, 再次将该型潜标布放于南海西北部, 布放点水深2 366 m,并于2021年5月27日搭乘海洋地质4号科考船对该潜标进行了回收, 此次布放的潜标与2020年5月在西太布放的潜标对比如表3所示。经统计, 潜标系统共计在位运行187 d, 剖面测量实际工作周期为753次, 共计获得6 524条水下驱动装置数据、23 227条抗污染CTD数据、13 0391条感应耦合传感器数据、18 036组ADCP数据和2 823组ACM数据。受海流影响, 水下驱动装置深度在40 m至180 m深度之间, 剖面平台CTD最深位置到达到了165 m。
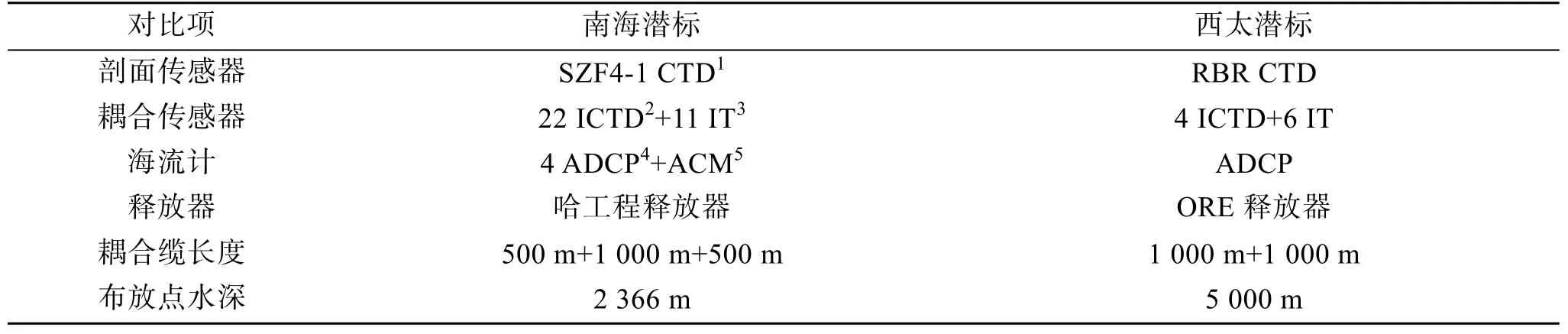
表3 2020年南海海试潜标与2020年西太海试潜标对比Tab. 3 Differences in underwater winch buoys between the West Pacific Ocean investigation in 2020 and the South China Sea investigation in 2020
由于投放点位于南海西北部陆坡上, 卫星高度计观测资料显示: 该地点受到中尺度过程的影响长期存在较大的海流, 导致垂直升降装置难以正常进行的剖面要素观测, 长时间的非正常运动导致水下驱动装置通信缆长期暴露在外, 逐渐被海洋生物附着, 最后致使水下驱动装置彻底无法进行工作, 而通信装置也因生物附着的问题导致无法正常通信。图12所示为潜标回收以后获取的传感器部分数据。
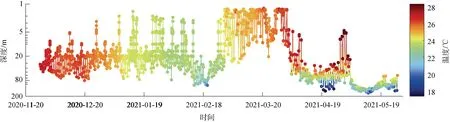
图12 2020年11月南海海试潜标剖面CTD部分数据Fig. 12 Partial CTD data of underwater winch buoy of South China Sea investigation in 2020
6 结语
本文提出了一种以水下绞车为基础的潜标控制系统设计方案, 该型潜标能够实现海洋垂直剖面要素长期、连续、定点、低成本的观测, 提高了水下观测数据的时效性, 对我国海洋环境监测和预报具有重要意义。潜标搭载了大量国产化仪器设备, 对推动国产海上仪器设备的发展起到了积极和示范作用。通过建立服务器与潜标之间的双向通信, 实现了潜标数据发送的补发机制和服务器对潜标的远程控制,极大地提高了服务器数据获取率, 对潜标的推广具有重要的意义。根据BLDCM的固有特性, 针对性地提出了基于监测电机转速的堵转保护方案, 兼顾堵转监测准确度与反应速度。经过多次海上试验, 验证了潜标控制系统设计方案的可行性与稳定性。
经过多次海上试验, 对水下升降式潜标的未来研究方向有如下几点展望: (1) 在深海布放潜标时,剖面运动容易受到海流的影响, 因此剖面数据采集装置净浮力需进一步提高, 同时为避免功耗进一步增加, 未来可将潜标结构设计为浮心深度不变式,以抵消通信缆上的拉力; (2) 在近海测试时, 潜标体积过于庞大, 在小型船只上布放与回收过程较为繁琐, 因此应当展开对潜标的小型化设计的研究;(3) 剖面观测消耗电量非常大, 因此降低水下电机的功耗或进行能量回收能在很大程度上推动基于水下绞车的潜标的发展; (4) 近海测试容易受到外部破坏, 尤其是渔网等海洋垃圾会对设备造成极大的损害, 潜标的电机堵转检测方案应当继续改进,提高设备的生存率; (5) 铱星通信费用高昂, 数据链路安全性较弱, 未来应当逐步使用国产卫星通信装置, 同时提高控制系统国产化率, 为我国海洋监测技术的发展起到积极建设作用。
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
汽车实用技术(2022年7期)2022-04-20
网络安全和信息化(2020年9期)2020-12-31
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年9期)2019-11-25
铁道通信信号(2019年4期)2019-10-10
网络安全和信息化(2019年8期)2019-08-28
制造技术与机床(2019年7期)2019-07-22
北京航空航天大学学报(2016年6期)2016-11-16
网络空间安全(2016年3期)2016-06-15