基于WIN7 的图像采集和质量分析系统设计
2022-06-29 06:08吴立强温景超支钰崧王宇杨明
电子设计工程 2022年12期
吴立强,温景超,支钰崧,王宇,杨明
(中国运载火箭技术研究院,北京 100076)
随着我国航天事业的飞速发展,对电子元器件的应用需求不断增大,而航天装备中部分元器件只能通过中间商渠道获取,会带来停产断档、伪劣翻新等质量方面的问题[1-2]。由于伪劣翻新元器件的质量存在诸多的不确定性和不可控性,在不加以控制的情况下,如果应用到航天装备中势必会给型号任务带来重大影响。通过对元器件进行特征分析和图像比对分析[3-6],开展真伪识别工作,能够比较有效地控制元器件的质量,在已开展的检测工作中,使用普通显微镜或数码照相机都不能实现元器件图像的快速采集和保证图像效果一致,在图像存在较大差异时会增加比对分析工作的难度,降低试验的效率。
在元器件图像采集过程中,需要解决由于元器件体积不一带来的视场不同,由于元器件壳体材料差异带来的清晰度不同,及如何准确对焦表征元器件主要特征等问题,归纳分类分析后,提出图像采集应具备的特点:适应3 mm×3 mm~65 mm×65 mm 不同大小的元器件,快速获得多角度、清晰、效果一致的图像。通过自主设计研发图像采集和质量分析软硬件系统,由暗室中的固定相机、电机控制镜头变倍、四自由度的载物平台、基于WIN7 系统编译的控制软件、以太网络数据传输等[7-8],实现了上述所有需求,解决了元器件真伪识别试验的实际需要,控制了元器件的质量。
1 系统整体设计
整个系统设计的核心在于快速实现不同尺寸元器件在不同角度下获取清晰、效果一致的图像,并实现图像比对功能。在系统中选用3 套acA2500-14gc相机和MLH-10X镜头,拍摄视场涵盖了3 mm×3 mm~65 mm×65 mm 不同尺寸的元器件,顶视、侧视、45°侧视相对位置固定的3 套相机实现了多角度拍摄[9];在还原实物真实物理特征方面,采用不同颜色光源和亮度的线性调节,并在暗室的条件下排除自然光的干扰,实现在陶瓷、金属、塑料元器件上都能够取得清晰图像的效果;为实现成像质量的一致,元器件的放置和镜头的调整全部由机械系统自动完成,采用电机带动载物平台移动和旋转,保证平台与镜头间的位置固定,通过软件控制电机的定位转动来控制镜头的变倍,保证每次获取图像的质量和放大倍数一致;在软件规划中设计了同屏4 幅图像比对,4 幅图像能够同步或异步移动、放大及缩小,实现图像快捷比对功能[10]。
2 硬件设计
系统的硬件主要包括acA2500-14gc相机、MLH-10X 镜头、LED 光源、电机、可编程逻辑控制器、以太网模块、计算机等。
2.1 相机的选择
系统相机作为核心部件之一,应具有较高分辨率,能够通过程序控制曝光功能,并且具有传输速率高的特点,Basler 公司的acA2500-14gc 相机正好符合这一特点。它是一款彩色CMOS 工业相机,应用较广易获得,其最大分辨率为2 592 像素×1944 像素,且具有通过应用程序接口控制曝光功能,与镜头的接口为C 口。在网络通信方面,自带Gigabit Ethernet千兆网,传输速率可达1 000 Mbit/s。这几个特征能够保证元器件图像采集的清晰、快速及曝光可程序控制。
2.2 镜头的选择和控制
系统的镜头作为另一核心部件,应具有较大的视场、与相机匹配的接口和能够程序控制变倍功能,但通过市场调研,并未找到完全符合要求的镜头,只找到与要求最贴近的MLH-10X 镜头。该镜头是1/2寸百万像素工业放大镜头,放大倍率为0.084~0.84 倍,接口为C 口,最小物距为152 mm,在200 mm 的工作距离下,视场范围可达到11.8 mm×8.9 mm~114 mm×85.6 mm,需要手动变倍。
为解决镜头程序控制变倍功能,提出一种基于MLH-10X 镜头改装的电动变倍方案,在镜头倍数调节圈上固定大齿轮,齿数为120,在电机轴上固定小齿轮,齿数为40,大小齿轮互相咬合,当电机转动时会带动镜头倍数调节圈转动实现变倍;计算机通过可编程逻辑控制器控制电机的转动。工作过程如下:计算机通过网络向可编程逻辑控制器发送指令,可编程逻辑控制器按照指令向电机驱动器发出控制脉冲,驱动器驱动电机转动,电机转动带动齿轮旋转,实现对镜头的电动变倍[11],采用绝对值编码器记录电机的位置,将当前位置反馈给可编程逻辑控制器[12],实现闭环控制。电动变倍闭环控制逻辑如图1 所示。

图1 电动变倍闭环控制逻辑
2.3 光源的设计
系统需要采集元器件的彩色图像,通常情况下,相比其他颜色光源,白色光源能够最为鲜明地呈现元器件的彩色图像信息,为配合相机的使用,光源位置与相机同侧高角度打光,并与相机数量相同,配置3 套光源。经实际验证,俯视高角度打光容易产生反光的现象,所以俯视成像光路不配备白色光源,而是在斜视成像光路配备白色光源。当俯视成像相机采集元器件正面图像和背面图像时,斜视成像光路的白色光源打光,其发出的白色光线斜向照射在元器件表面,经过漫反射到俯视成像光路的镜头中,不会出现反光现象[13]。而为了更直观地记录元器件表面的打磨等痕迹,俯视成像配备蓝色光源,采集正面图像和背面图像时,除了采集白色光源下的图像,也同时采集蓝色光源下的图像。系统设计的“俯视蓝光+斜视白光+侧视白光”组合光源方案示意图如图2所示。
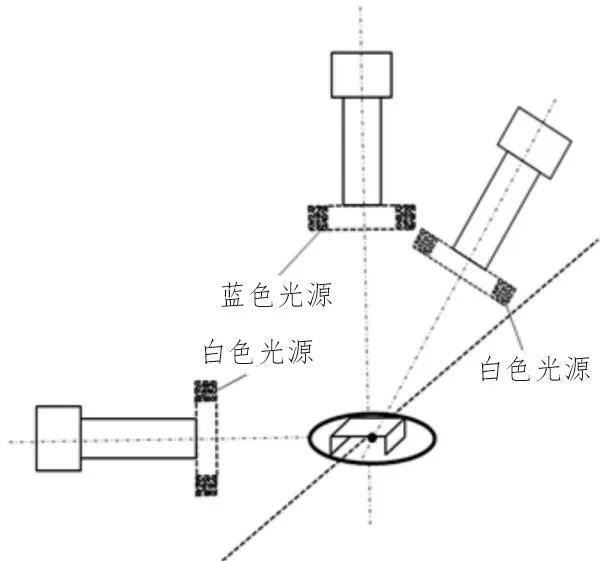
图2 组合光源方案示意图
2.4 载物平台的设计
为避免自然光的干扰,系统壳体设计为封闭暗室结构,与外部环境的接口仅用于传送元器件,将元器件放置在载物平台上,载物平台通过系统与外部环境接口,从放置点移动到采集点进行图像采集。该项设计不能采用手动控制,手动控制无法保证每次放置位置的一致性,文中设计了如下电动运动结构来满足系统的需要:
1)将放置点到采集点的方向定义为X方向,载物平台需要具有X方向的自由度,可以将元器件从放置点运送到采集点,从采集点运回到放置点;
2)从侧视角度采集侧面图像,由于元器件的长度范围为3~65 mm,而侧视成像光路的相机、镜头、光源的位置均已固定,当元器件长度发生变化时,镜头与元器件目标的拍摄距离也发生变化,为了实现清晰的图像采集,需要载物平台适当的移动以调整镜头同目标的距离,完成清晰的聚焦。将侧视成像光路中心线的方向定义为Y方向,载物平台需要具有Y方向的自由度;
3)从俯视角度采集元器件的正面图像和背面图像,由于元器件的高度范围为2~30 mm,而俯视成像光路的相机、镜头、光源的位置均已固定,当元器件高度发生变化时,镜头与元器件目标的拍摄距离也发生变化,因此载物平台需要具备在竖直方向位移的功能。将竖直方向定义为Z方向,载物平台需要具有Z方向的自由度;
4)元器件通常包含4 个侧面,需要从侧视方向采集4 个侧面的图像,为了实现4 个侧面图像的采集,载物平台需要具备绕竖直方向即Z方向旋转的功能。将绕竖直方向的旋转方向定义为R方向,载物平台需要具备R方向的自由度。
载物平台[14]需要具有X、Y、Z、R4 个方向的自由度,在4 个方向有位移和并能够旋转,配合光源、镜头、相机等光学部件实现对元器件多角度、全方位、清晰的图像采集功能,载物平台四自由度运动结构设计载物平台示意图[15]如图3 所示。

图3 四自由度运动结构载物平台示意图
综上所述,将相机、镜头、光源、载物平台由以太网络相连接,它们之间的指令收发、数据接收和存储由计算机控制,形成了一套完整的元器件图像采集系统。利用系统开展一次完整的图像采集流程,如图4 所示,其中除了在放置点取放器件外,其他所有操作都在计算机上由软件操作完成。

图4 一次完整的图像采集流程
3 软件设计
3.1 软件结构
为实现该系统的整体设计和未来系统的应用扩展,系统软件采用了C/S 结构[16-17],其中,C 表示客户端(Client),S 表示服务器(Server),即“客户端/服务器”结构。系统用户通过客户端的计算机应用程序向服务器发出数据服务请求,服务器接收请求后进行数据处理,将处理结果回传给客户端。C/S 结构的优点是充分利用客户端的硬件,降低系统运行的时间。C/S 结构软件数据传输示意图如图5 所示。

图5 C/S结构软件数据传输示意图
为有效提高工作效率,利于多人并行方式开展质量分析工作,软件包括采集软件和管理软件,两个软件可以独立运行,采集软件在硬件平台控制计算机中运行,功能集成了相机曝光、镜头变倍控制、光源选择控制、载物平台移动旋转控制和参数设置等功能。管理软件可以在已连接局域网的符合最低配置要求的任何一台WIN7 系统计算机上运行,功能集成了试验任务建立和管理,元器件任务和图像的关联,建立元器件标准库及标准比对规则,对元器件图文数据库的显示、编辑、检索、排序等。
3.2 软件开发环境
系统软件是在Visual Studio 2012 集成开发环境下编译的,使用C#编程语言,采用SQL Server 2008数据库进行图文数据的存储和调用,通过“套接字”来实现对网络的请求和应答,系统中计算机软件对工业相机、光源、可编程逻辑控制器的控制、客户端与服务器的数据通信都是基于Socket 通信的方式。文中主要介绍了系统硬件结构的设计思路和组成,软件的设计思路和编译过程这里不进行一一赘述。
4 系统测试及应用
系统经连机测试,能够获取和存储各类封装、不同尺寸元器件的清晰图像,通过蓝色或白色光源的控制,能够获得元器件细节方面的准确信息,通过载物平台四自由度的设计能够很容易地获取元器件任意角度的图像。某进口集成电路自身不同方向、不同光源下采集的图像如图6 所示,该界面也是元器件比对分析的功能界面。
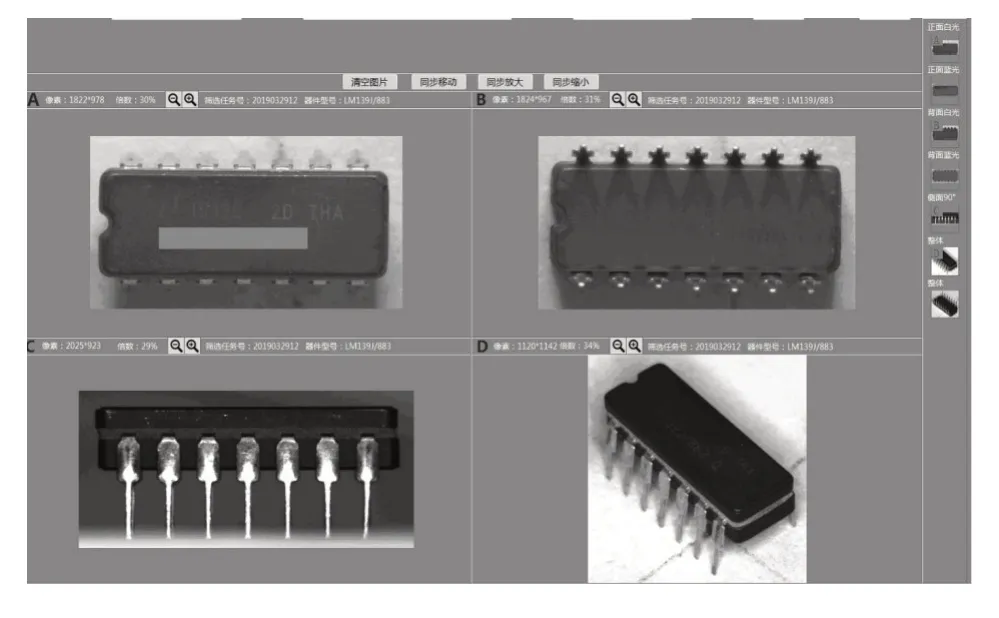
图6 软件比对分析界面
系统的应用有效提高了试验的工作效率和准确性,在系统投入使用后,已积累了大量国内外公司的各类元器件6万批次40多万张图文资料信息,为航天型号任务的顺利研究起到数据支撑和把关作用[18]。
5 结论
采用工业相机、镜头、光源、计算机等硬件,基于网络通信和暗室屏蔽自然光干扰的设计思路,设计并制造了一套元器件图像采集和质量分析系统,解决了元器件真伪识别试验的瓶颈问题。实际应用表明,该系统适应范围广,能够对各类元器件进行图像采集和分析,图像清晰、效果一致,试验工作的并行开展,提高了工作效率和工作质量。
猜你喜欢
猪业科学(2022年8期)2022-09-09
军民两用技术与产品(2022年7期)2022-08-06
防爆电机(2022年3期)2022-06-17
航天工业管理(2022年4期)2022-05-21
防爆电机(2022年2期)2022-04-26
家庭影院技术(2021年9期)2021-11-05
航天工业管理(2021年4期)2021-05-19
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
扬子江(2016年1期)2016-05-19