基于特征点匹配的无人机遥感图像快速拼接系统
2022-06-29 06:08卢征
电子设计工程 2022年12期
卢征
(河南省有色测绘有限公司,河南安阳 455000)
遥感图像应用十分广泛,目前针对遥感图像研究的热点主要集中在多角度航空影像的三维建模、目标检测和跟踪等方面[1-2]。有学者提出利用AKAZE算法来解决无人机遥感影像的匹配拼接问题,AKAZE 算法能够保存遥感影像的纹理结构和局部信息,具有很好的拼接效果,因此传统系统提出利用AKAZE 算法进行无人机遥感图像快速拼接。虽然该系统能够快速有效地提取特征,并能显著减少特征点,提高效率,但耗时较长,算法有待改进。基于光线特性,相关学者提出了一种改进的快速图像拼接系统,该系统能在保持配准速度的前提下,达到亚像素级配准精度,并具有良好的场景适应性,但是拼接速度较慢[3]。
目前,提出的拼接系统在拼接速度上都难以达到人们的要求。因此该文利用特征点匹配提出了一种新的无人机遥感图像快速拼接系统,利用AKAZE 算法提取图像的特征点,对特征向量进行描述,得到图像的主方向,实现图像的精确匹配。采用特征点提取时间、匹配精度等指标对该方法进行分析验证,并与其他系统进行了对比,从而验证文中系统的可行性。
1 系统硬件设计
设计的无人机遥感图像快速拼接系统硬件主要由采集器、处理器、拼接控制器3 部分组成,系统硬件结构如图1 所示。
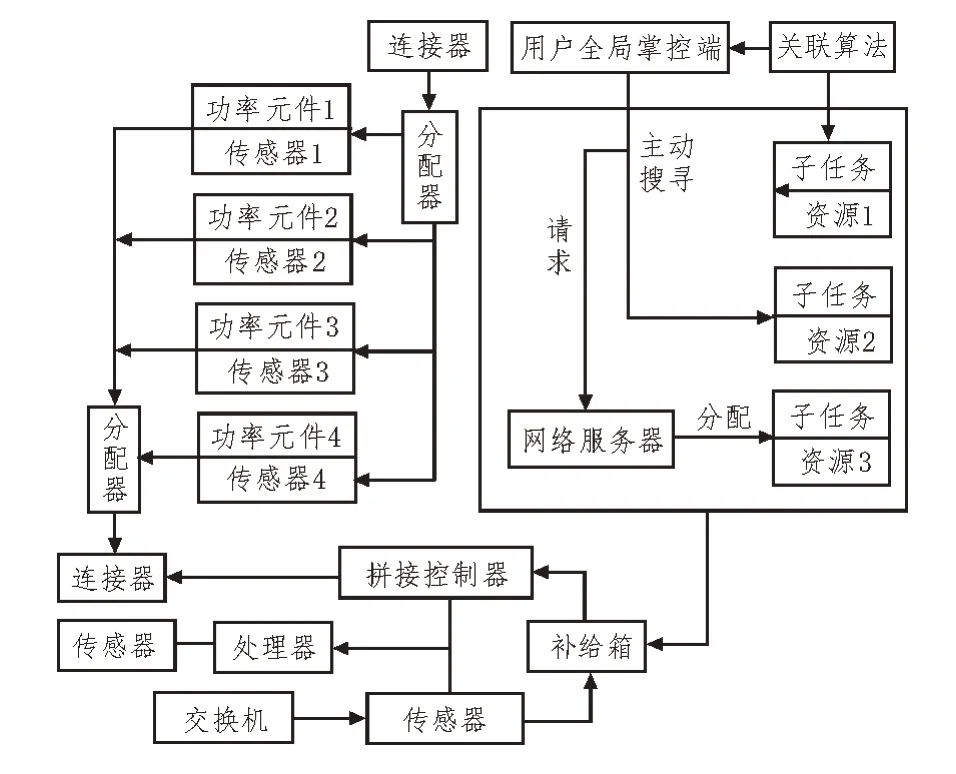
图1 无人机遥感图像拼接系统硬件结构
1.1 采集器设计
采集器是提出的遥感图像快速拼接系统的基本设备[4],其作用是执行各项操作指令,采集器主要包括数据采集单元、中央处理单元和载波调制解调单元,采集器结构如图2 所示。
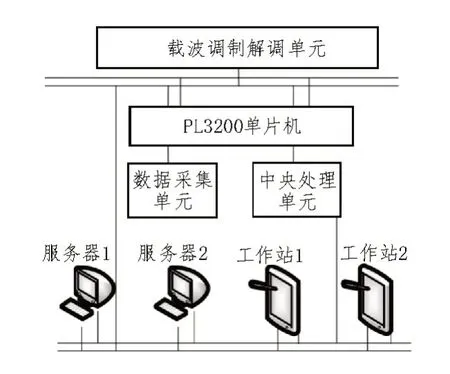
图2 采集器结构
采集器内部引入PL3200 芯片,该芯片同时具备采集、计算能力,利用RS485 串行通信口实现系统初始化。PL3200 芯片能够提高系统的开发速度,内部的8/16 位双模式能够很好地提高运行速度,增强数据处理能力[5-6]。同时,PL3200 芯片外部设计了两个全双工结构,通信模式分别采用了红外通信模式和RS485 通信模式,可为不同的数据实现信息传输。采集器电路图如图3 所示。引入的PL3200 芯片采用双通道电流实现采样,能够很好地防止窃电。

图3 采集器电路图
1.2 处理器设计
文中选用的处理器为Power7处理器,该款处理器经过多年的研发,相比于Power1 处理器,Power7 处理器取得了巨大的进步[7-8]。处理器示意图如图4所示。

图4 Power7处理器示意图
图4 中的Power7 处理器具有很好的运算速度,工作性能更加优异,Power7 处理器的内部节点能够支持两个以上3.8 GHz 的8 核模块运作[9],系统工作能力强,Power7 处理器的逻辑结构内部的核心为Power PC 核心,核心机构的执行条令位数为64 位,每个处理器都能执行多个指令,最高可达到200 条指令,处理器工作频率为1.5 GHz,引入缓存可以更好地完成信息交互,使采集器采集到的数据流更加顺利地流通和传递。
1.3 拼接控制器设计
在设计的遥感图像快速拼接系统中,拼接控制器为核心设备,该控制器有利于图像在大屏幕上显示,从而带来更好的视觉体验[10]。设计的拼接控制器内部采用分布式处理器,通过数字网络将采集的数据和传输的数据连接起来,更好地在大屏幕上展示。拼接控制器分散结构能够使输入节点和输出节点更好地分开,提高了系统的灵活性,使系统能够进行图像信号多点共享,使网络图像具备输入功能和移动终端控制功能[11-12]。拼接控制器的工作原理如图5 所示。
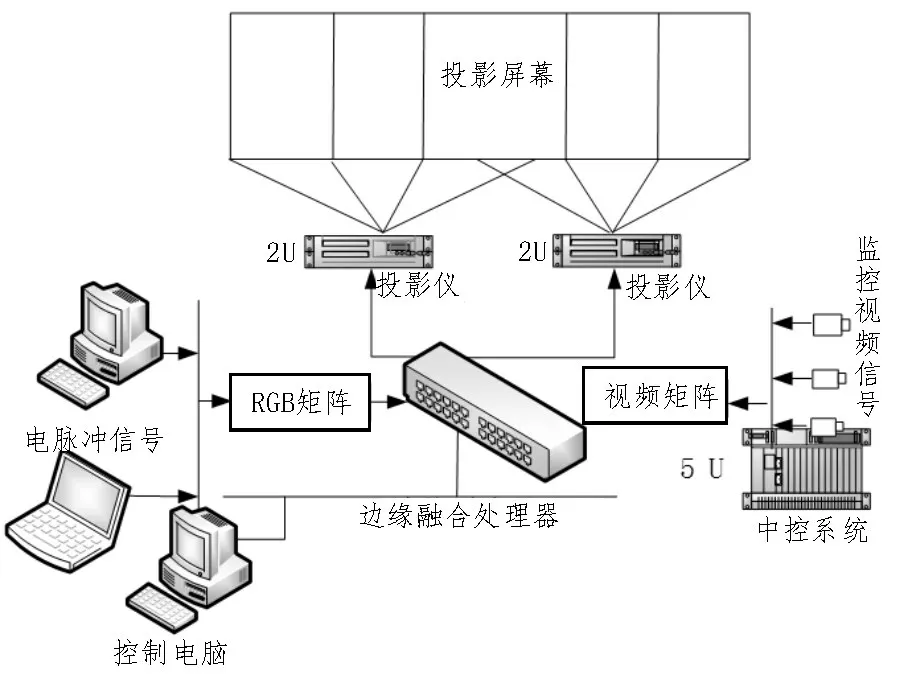
图5 拼接控制器的工作原理
设计的拼接控制器引入了WT-20 边缘控制器,该控制器采用嵌入式结构,使用了目前国内比较先进的边缘融合技术,控制器内部设置了一个超高分辨率的单一逻辑屏幕,屏幕之间不存在拼接缝隙,这样在大屏幕上显示的数据就是所有显示单元的拼接总和。设计的拼接控制器能够同时显示视频信号、RGB 信号以及图文信号,具备窗口漫游功能,能够实时显示各种信息。
2 系统软件设计
利用AKAZE 算法提取特征点,利用可变传导函数建立尺度空间,从而检测非线性扩散滤波,设定得到的无人机遥感图像亮度为L,得到的流动函数散度的计算公式如下:

式中,t表示尺度参数;c(x,y,t)为模糊识别参数,ΔL表示传导函数。如果传导函数为正常值,则得到的扩散自适应图像局部结构也为正常值[13]。根据式(1)可知,随着t值的增加,图像表达复杂程度越来越小。
构造非线性尺度空间,分析尺度级别的改变,利用尺度参数判断每一层的图像分辨率是否和最初分辨率相同。尺度参数的计算公式如下:

式中,σ0表示在图像拼接过程得到的初始值;M表示拼接图像尺度空间的影像总数;σi(m,s)表示尺度参数的匹配关系。
进化的时间ti为:

在处理无人机遥感图像的过程中,引入高斯滤波函数,得到数据特征,在大屏幕上显示梯度直方图,从而确定对比度参数[14]。构建非线性尺度空间,利用归一化处理,得到无人机遥感局部的极大值点,设定采集矩阵为:

式中,σ为尺度参数σi的平均值。通过获取极值点,得到更加确切的像素点,将得到的像素点与无人机遥感周围其他的像素点对比,从而得到特征点的位置,利用亚像素实现精准定位,得到特征点的准确位置。
在确定特征点位置后,确定特征点所在的范围,从而获得邻域,将邻域以均分的方式分成36 个方向直方图,在直方图中确定最大值特征点的主方向[15]。寻找计算结果直方图的峰值,将得到的直方图峰值与最大直方图峰值进行比较,如果得到的峰值结果超过80%,则该方向的峰值方向为辅助方向,在辅助方向中可以寻找1/5 特征点的数据。在无人机遥感图像拼接中,特征点发挥着非常重要的作用,辅助方向的特征点能够很好地提高数据匹配拼接过程的稳定性[16]。
在拼接过程中,需要对主方向的特征点进行校正,校正后的特征点可以生成描述点,从而进化成特征向量,该特征向量维度为128 维,确定特征向量后,进行归一化处理,改善由于光照而导致的匹配率降低的情况。
3 实验研究
为了验证提出的基于特征点匹配的无人机遥感图像快速拼接系统的有效性,与传统的拼接系统进行实验对比,选用的传统系统分别是基于AKAZE 算法的无人机遥感图像快速拼接系统、基于光纤特性的无人机遥感图像快速拼接系统,分析系统拼接过程的耗时情况和拼接结果精准度。
设定运行过程的实验参数如表1 所示。
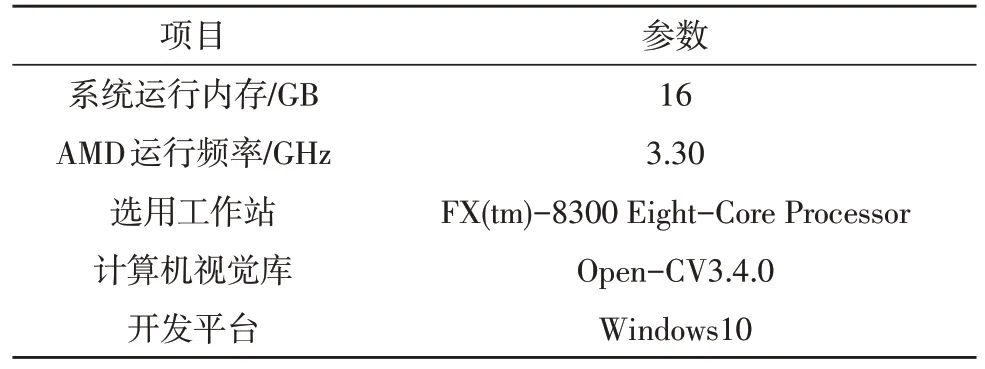
表1 实验参数
根据表1 中参数对图6 中的不同无人机遥感图像进行拼接。

图6 实验影像
选用文中系统和传统系统对图6 中的实验影像进行拼接,得到的拼接过程耗时实验结果如表2所示。
根据表2 可知,在对图6(a)的图像进行拼接时,基于AKAZE 算法的无人机遥感图像快速拼接系统与提出的基于特征点匹配的无人机遥感图像拼接耗时相差较小,提取的特征点数也相对较少;而基于光纤特性的无人机遥感图像快速拼接系统耗时最长,性能最差。在对图6(b)的图像进行拼接时,提出的基于特征点匹配的无人机遥感图像快速拼接系统的耗时要远远小于传统系统,主要是因为提出的特征点匹配算法能够很好地缩减非线性尺度空间的构造时间。匹配精准度实验结果如图7 所示[17]。
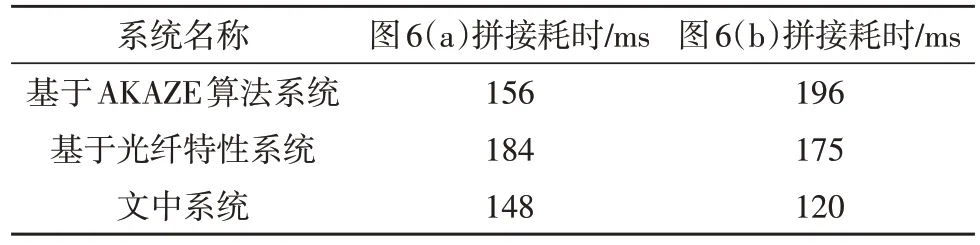
表2 拼接耗时实验结果

图7 匹配精准度实验结果
根据图7 可知,提出的拼接系统拼接精度高,在拼接过程中,提出的系统能够更好地确定特征组合的正确匹配点,因此拼接速度快,精准度高。
综上所述,文中提出的基于特征点匹配的无人机遥感图像快速拼接系统具有很好的拼接效果,能够有效缩短拼接时间,更加适合无人机遥感影像匹配工作。
4 结束语
文中设计的基于特征点匹配的无人机遥感图像快速拼接系统将拼接技术和三维重建技术有效结合在一起。实验结果表明,特征组合算法能够很好地提高匹配速度,减少冗余计算量。与传统系统相比,文中提出的拼接系统拼接速度更快,更适合应用到无人机遥感影像匹配工作中。
无人机遥感图像拼接还在不断发展中,未来对于图像拼接的清晰度要求更加严格,可以对此进行更加深入的研究。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
现代仪器与医疗(2021年1期)2021-06-09
振动工程学报(2019年2期)2019-05-13
网络空间安全(2019年8期)2019-03-18
影像视觉(2018年12期)2018-11-29
农家科技下旬刊(2017年5期)2017-06-20
中学生数理化·高一版(2017年2期)2017-04-25
初中生世界·八年级(2017年3期)2017-03-24
科技传播(2012年10期)2012-06-06