分数阶Sprott A混沌系统的自适应同步
2022-07-14 06:36颜闽秀接敬锋
扬州大学学报(自然科学版) 2022年2期
颜闽秀, 接敬锋
(沈阳化工大学信息工程学院, 沈阳 110142)
混沌理论被广泛应用于环境污染、图像或通信加密、故障诊断和土壤盐渍化处理等方面[1-2]. 混沌系统对初始条件的强敏感性使得吸引子共存现象及其同步控制成为研究热点[3-4]. 通常, 当混沌系统自身存在对称特性时, 易产生多吸引子共存现象[5]. 具有对称性的非线性动力学系统更能表现出多稳态特性, 系统可根据外部环境在不同的稳态之间进行切换[6-7]. 近年来, 多吸引子共存的实现方法备受关注. Lai等[8]利用非线性反馈控制输入实现了多吸引子共存; Fang等[9]构造的四维分数阶混沌系统能够产生共存隐藏吸引子且存在极端多稳态情况; Bao等[10]使用忆阻器代替耦合电路实现具有1个鞍点和2个稳定焦点的混沌电路, 提出无限多吸引子共存的问题, 探究得出长期动力学行为与忆阻器的初始条件密切相关的结论; Huang等[11]认为混沌系统复变量的实部与虚部之间存在线性相关性, 并采用经典Lorenz系统表示其线性相关关系, 再利用复杂系统验证了简化定律; Rashidnejad等[12]通过研究混沌系统的有限时间同步, 提出分数阶滑动面并进行实例评估; Yu等[13]在蔡氏电路中通过构造复合双曲正切三次非线性函数成功产生多涡卷吸引子; 笔者[14]运用Silnikov定理引入零点分段函数, 通过扩展系统平衡点增加系统不变集, 构建出共存吸引子个数可调的混沌系统. 上述文献主要是针对整数阶混沌系统多吸引子共存现象开展的研究, 而分数阶混沌系统的多吸引子共存鲜见报道. 本文拟应用Caputo定义Sprott A系统, 并在分数阶Sprott A系统的基础上增加含有余弦周期函数的非线性项,得到具有唯一平衡点的新分数阶混沌系统, 以期在不同的初始条件下产生多重吸引子共存现象.进一步地, 设计自适应控制器, 以实现对新分数阶混沌系统在参数未知情况下的同步控制.
1 混沌系统方程
经典Sprott A系统[15]为
(1)
应用Caputo定义系统(1), 得到
(2)
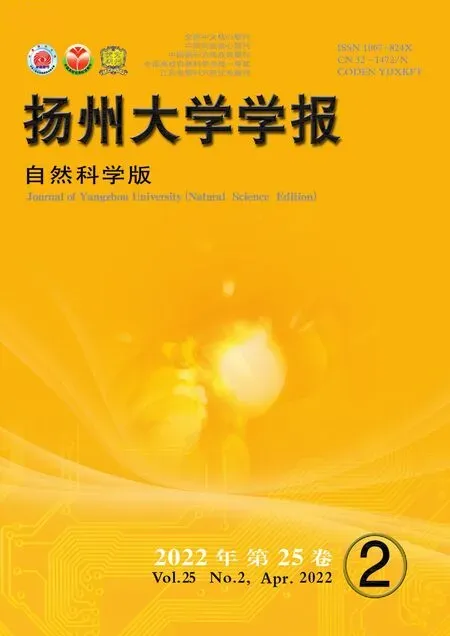
当系统(2)的初始值选取(0.1,0.1,0.1)时, 其动力学特性分析结果如图1所示.
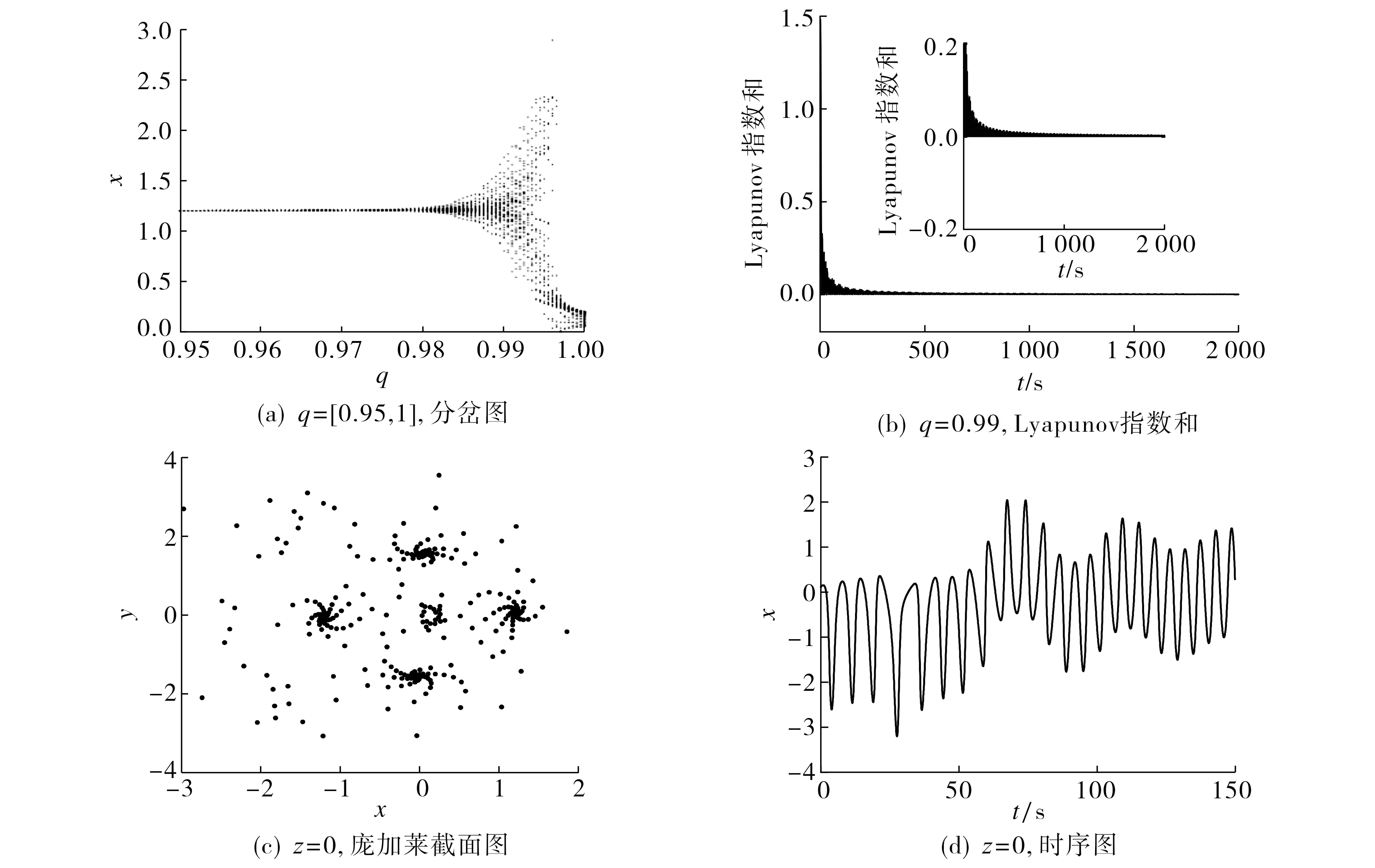
图1 系统(2)的动力学特性分析Fig.1 Analysis of dynamic characteristics of system (2)
由图1可见: 系统(2)在阶次变化时存在从周期向混沌的转化过程; 系统(2)在大范围内的Lyapunov指数之和不为0, 具有混沌吸引子; 庞加莱截面图中的密集成片点和时序图中所展现的连续性都显示出系统的混沌特性.
虽然系统(2)能产生混沌吸引子, 但是由于系统电路结构简单而无法实现多重吸引子共存. 现对系统(2)增加非线性项和不确定参数, 得到新的分数阶混沌系统
(3)
系统(3)相较于系统(2)结构更加复杂,余弦函数以及非线性项的添加使得共存吸引子的出现成为可能.设定初始条件a=6,b=5,q=0.98, 初始值为(1,1,1), 系统(3)产生的混沌吸引子如图2所示.
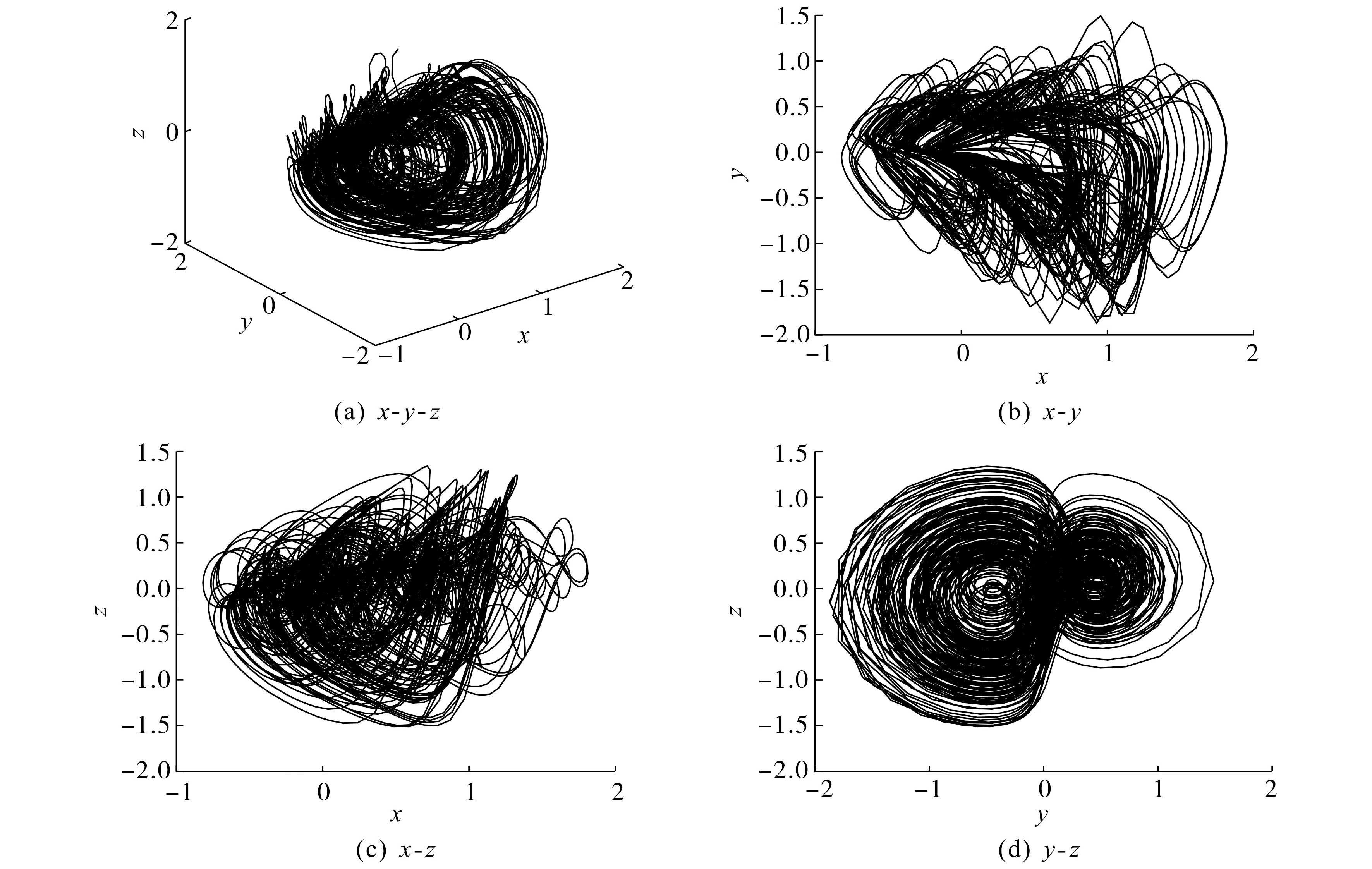
图2 系统(3)的混沌吸引子图Fig.2 Chaotic attractor diagram of system (3)
2 系统的动力学特性分析
将系统(3)左端赋值为0,得到
(4)
选取参数a=6,b=5, 得到式(4)的唯一平衡点(133.5,0.447 2,49.76).据分析, Jacobian矩阵
(5)
的特征值为298.5, 0.040 2, -49.76, 故可判定其平衡点为一个不稳定的鞍点.
当初始值为(1,1,1)时, 系统(3)的Lyapunov指数图如图3(a)所示, 其中Lyapunov指数L1=0.212 5,L2=0,L3=-0.379 9, 对应的Lyapunov维数
(6)

由图3(a)可见系统(3)的Lyapunov指数存在正数、0和负数共存的情况.选取z=0, 得到x-y平面的庞加莱截面图如图3(b)所示. 由图3(b)可知, 大量无规则密集点的存在表明系统(3)为混沌系统.
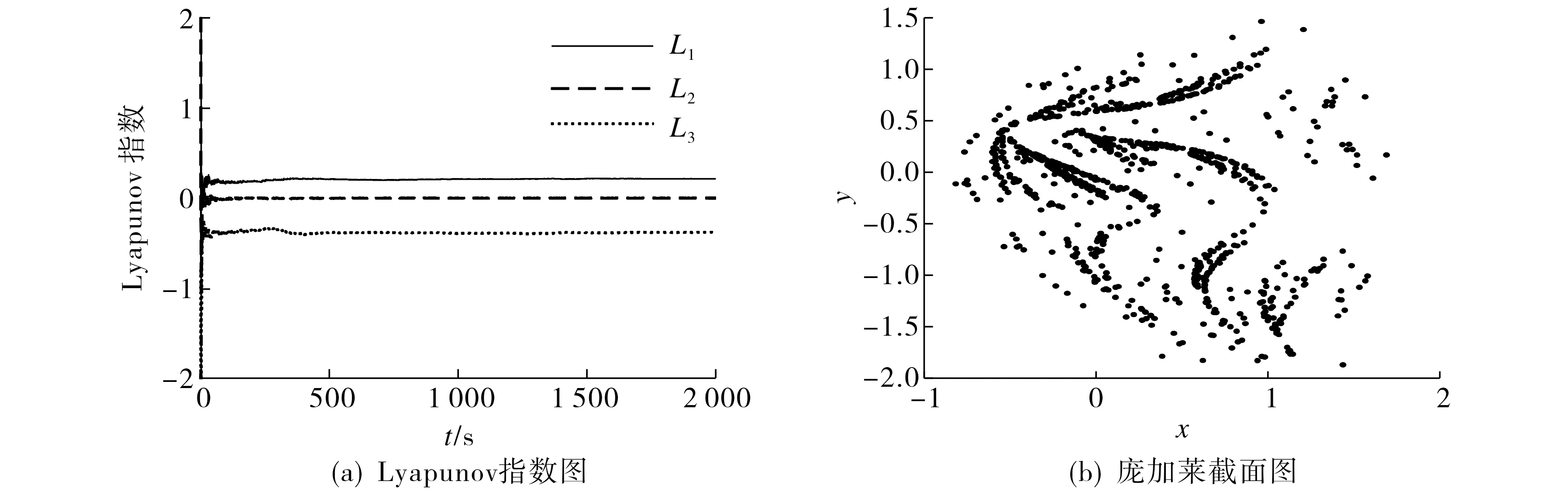
图3 系统(3)的动力学特性分析Fig.3 Analysis of the dynamic characteristics of system (3)
3 系统的吸引子共存现象
设定参数b=5, 初始值为(1,1,1), 阶数q=0.98, 得到a∈[3,10]时系统(3)的最大Lyapunov指数和分岔图, 如图4所示.由图4可见, 系统(3)在a∈[3,4.2)时处于周期状态;a∈[4.2,4.5)时处于倍周期状态;a∈[4.5,10]时处于混沌状态.进一步地, 选取a=3,4.3,5,10, 系统(3)的吸引子图如图5所示.
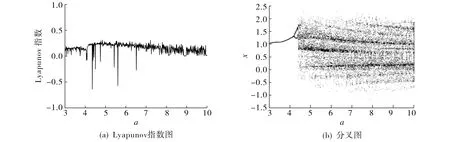
图4 a[3,10]时, 系统(3)的最大Lyapunov指数和分岔图Fig.4 The maximum Lyapunov exponent diagram and bifurcation diagram of system (3) when a[3,10]
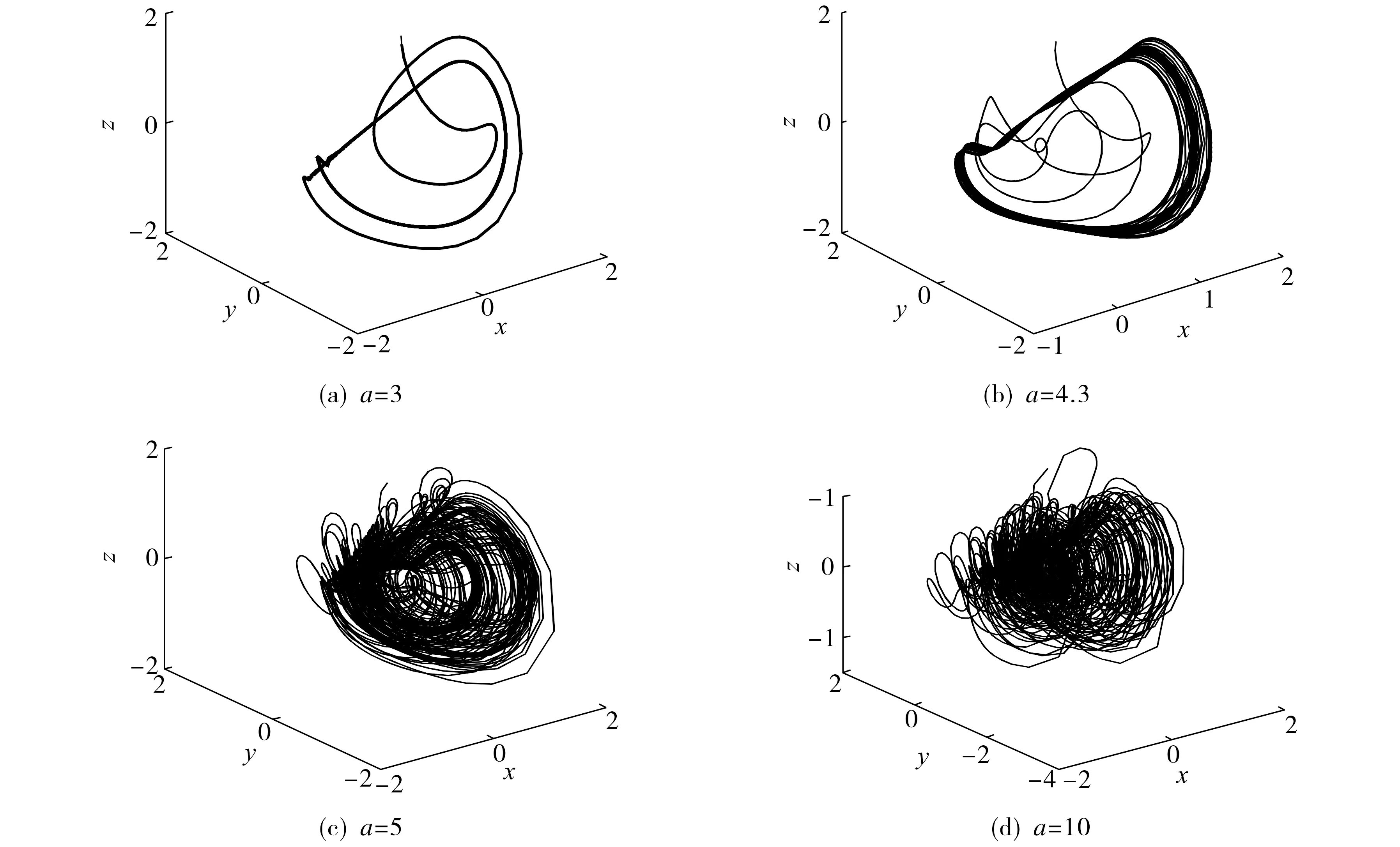
图5 b=5时, 系统(3)的吸引子图Fig.5 Attractor diagram of system (3) when b=5
设定参数b=3.8,a∈[3,6],q=0.98, 初始值分别选取x01=(-2.5, -2.5, -2.5),x02=(0.5, 0.5, 0.1).系统(3)在不同初始值时的分岔图及共存吸引子图如图6~7所示.
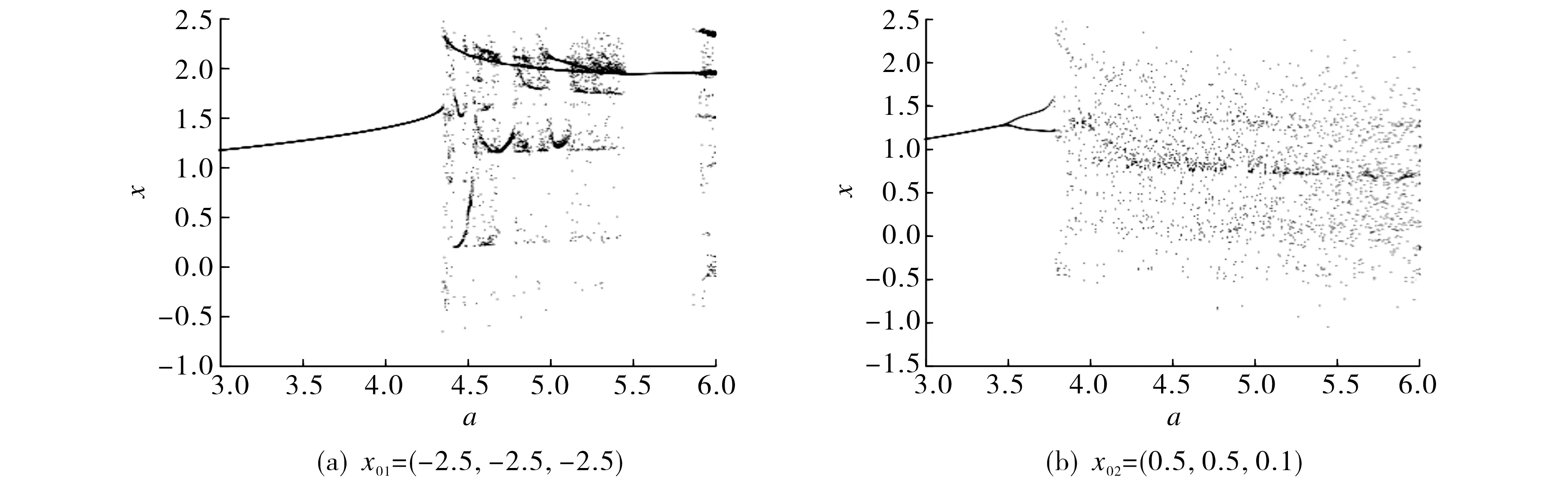
图6 b=3.8, 不同初始值下系统(3)的分岔图Fig.6 b=3.8, bifurcation diagram of system (3) with different initial values
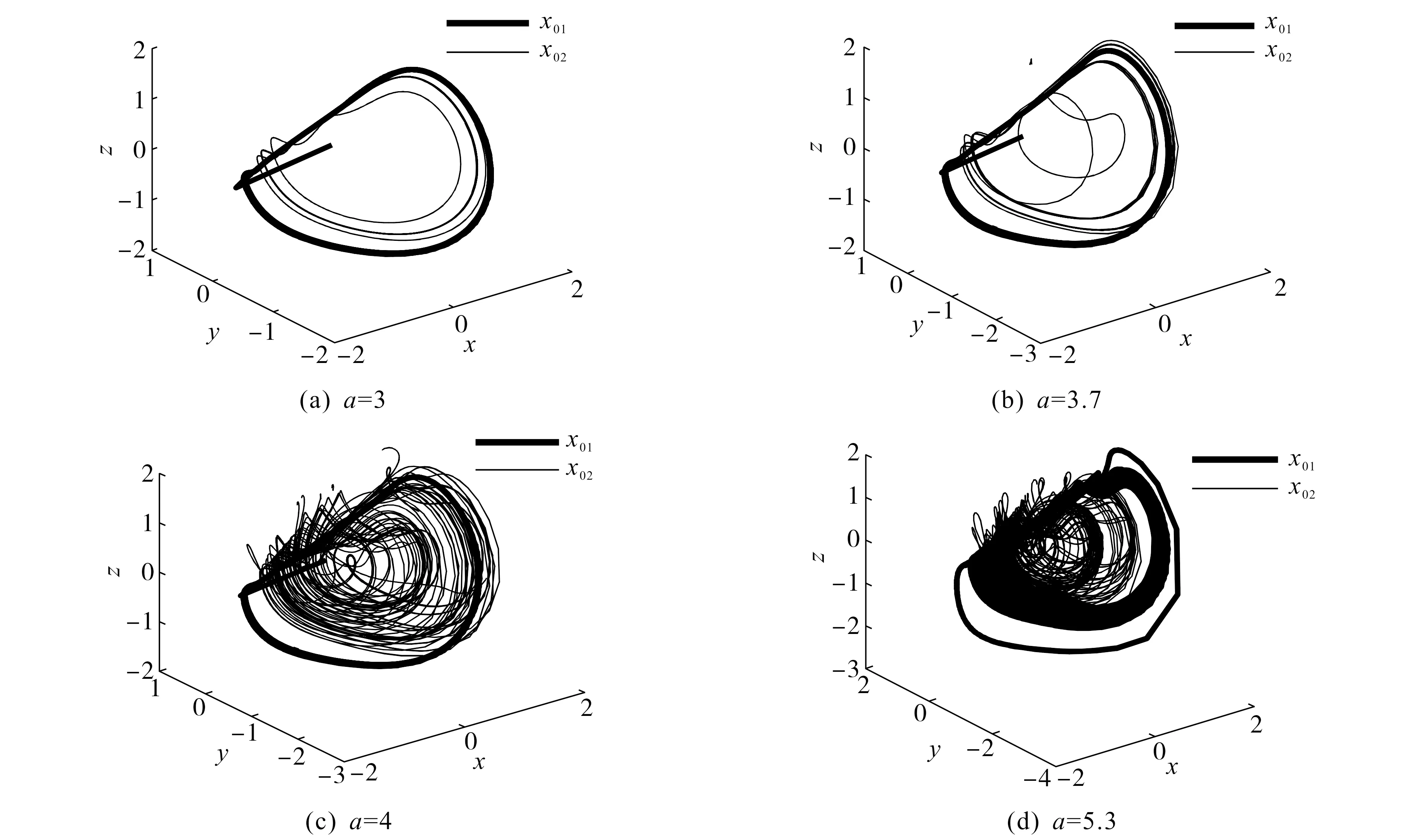
图7 b=3.8, 不同初始值下系统(3)的共存吸引子图Fig.7 b=3.8, coexistence attractor diagram of system (3) with different initial values
由图6~7可见: 系统(3)在不同初始值作用下的动力学轨迹存在差异;a=3时, 存在周期吸引子共存现象;a=3.7时, 存在周期吸引子和倍周期吸引子共存现象;a=4时, 存在混沌吸引子与周期吸引子共存现象;a=5.3时, 存在混沌吸引子共存现象.
上述研究表明, 系统(3)存在大量来自不同区域的共存吸引子.当参数a=0.5,b=0.9, 阶次q=0.98, 初始值选择(-0.1k,-0.1,-0.1),k=π,1.5π,2π,2.5π时, 系统(3)的吸引子共存图如图8(a)所示. 图8(a)显示系统(3)存在4个周期吸引子.当参数选取a=5,b=10, 初始值选择(0.1k,0.5,0.5),k=π, 1.5π,2π, 2.5π时, 系统(3)的吸引子共存图如图8(b)所示. 图8(b)显示系统(3)存在周期吸引子、倍周期吸引子和混沌吸引子共存的现象.仿真结果表明, 系统(3)可以通过选择不同的初始条件产生不同的吸引子. 由于系统(3)中存在余弦周期函数, 这为无穷多混沌吸引子的产生奠定了条件, 当k趋近于无穷时能够产生无穷多的共存吸引子.
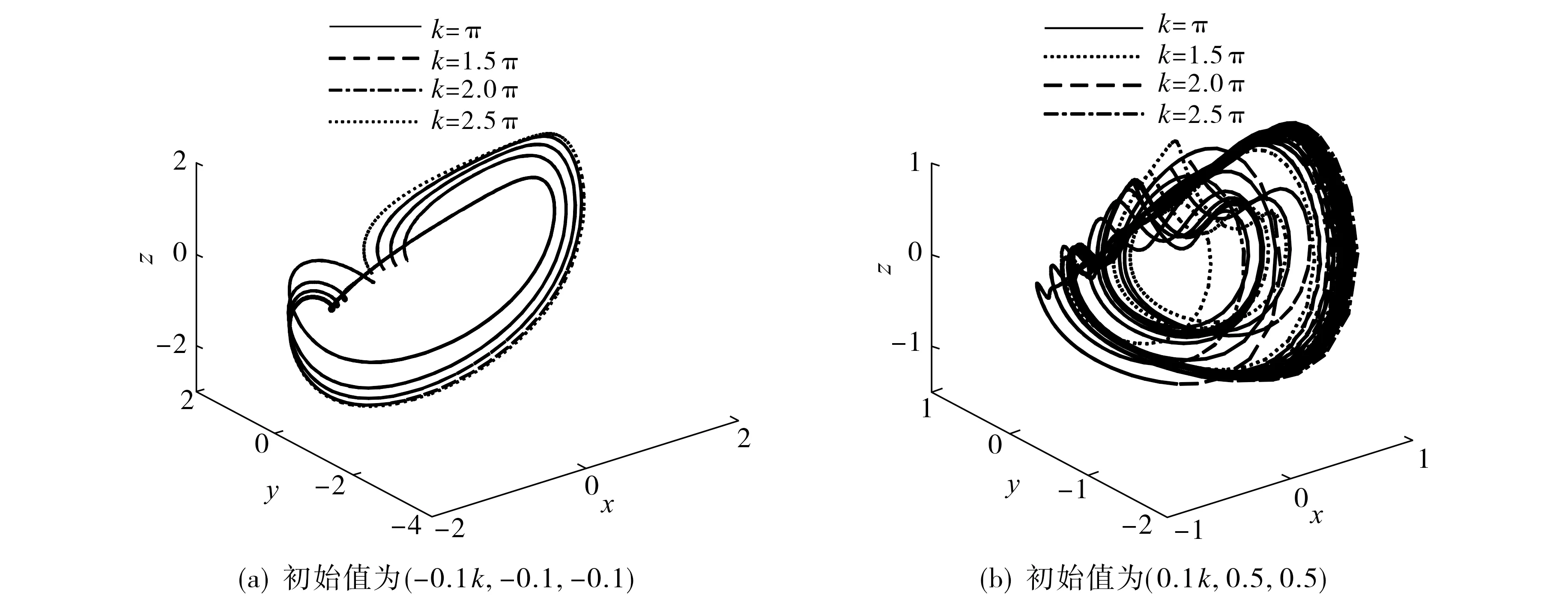
图8 系统(3)的多重吸引子共存图Fig.8 Coexistence diagrams of multiple attractors in system (3)
4 自适应同步控制器的设计
选取系统(3)作为驱动系统, 并改写形式为
(7)
其中xi为状态变量,i=1,2,3;a,b为未知参数.
响应系统为
(8)

定义同步误差ei=yi-xi.根据式(7)(8)得到误差动态方程
(9)

(10)
选取控制参数k, 得到自适应控制器
(11)
设计参数自适应律
(12)
DqV≤e1Dqe1+e2Dqe2+e3Dqe3+eaDqea+ebDqeb.
(13)
将式(9)(10)(12)代入式(13), 得
根据Lyapunov稳定性理论可知误差系统处于渐近稳定状态, 驱动系统(7)与响应系统(8)趋于同步.
5 仿真分析
为了验证控制器的有效性, 应用MATLAB软件进行仿真实验. 设置驱动系统初始值为(1.5, 0.2, 2.5), 响应系统初始值为(1,2,-2), 误差系统初始值为(-0.5,1.8,-4.5), 估计参数a=6,b=5, 阶次q=0.98, 控制参数k=10.基于上述数据进行仿真, 得到同步仿真结果如图9所示.由图9可见, 驱动系统与响应系统可在短时间内实现同步, 误差系统能快速趋近于0.进一步验证了自适应控制器的可行性与有效性.
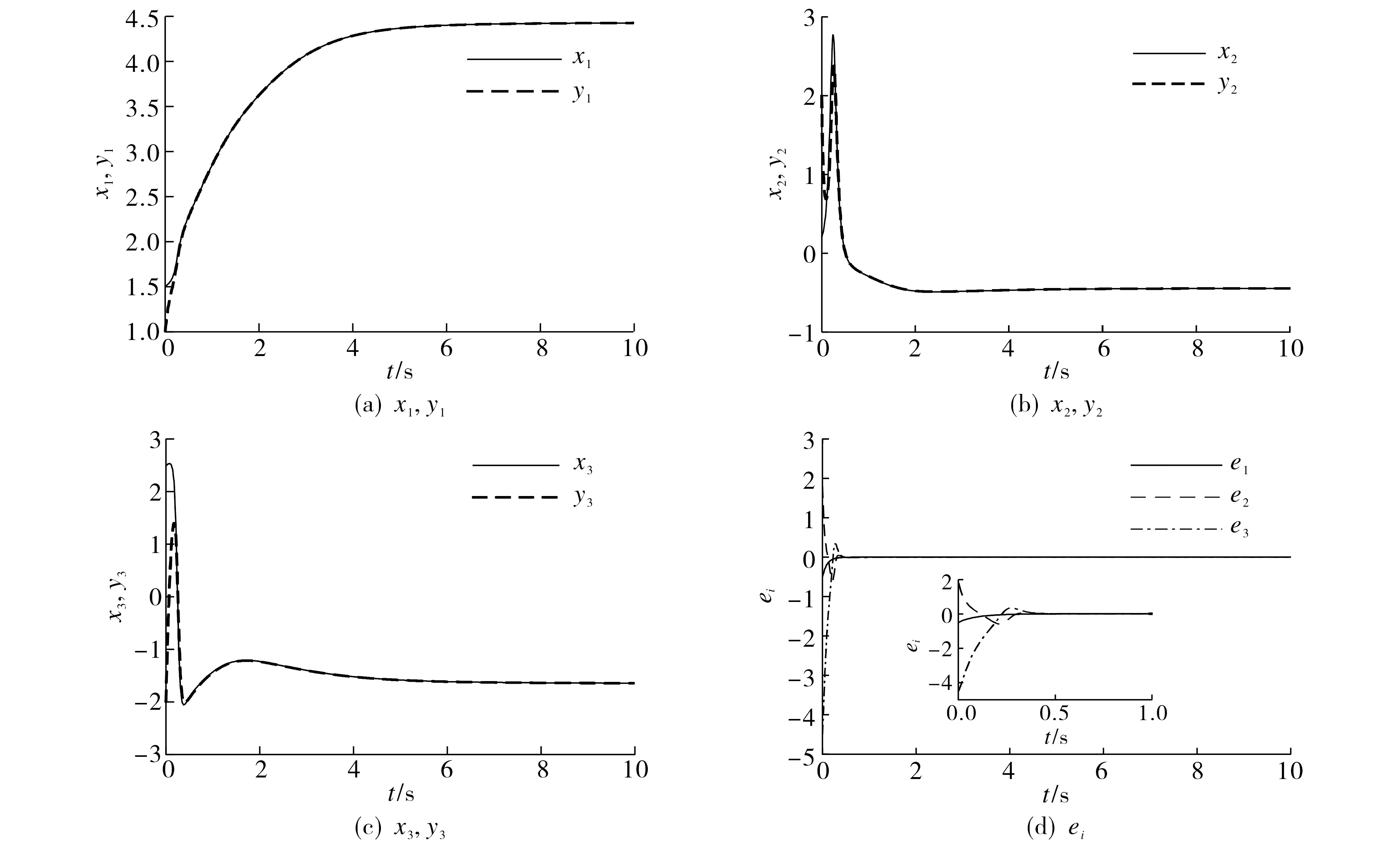
图9 同步误差Fig.9 Synchronization error
6 结论
本文对Sprott A系统进行分数阶处理, 并在分数阶Sprott A系统的基础上增加非线性项, 得到能够产生多重吸引子共存的分数阶混沌系统.通过探讨新分数阶混沌系统的动力学特性和设计自适应控制器,实现了含未知参数情况下分数阶系统的自适应同步.结果表明,新分数阶混沌系统的混沌特性极其丰富,具有对初始条件强烈的敏感性, 能够在不同参数和初始值的作用下产生多重吸引子共存乃至无穷多吸引子共存的情况. 本文设计的自适应控制器可在参数未知的条件下实现系统同步,具有一定的实际意义.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
茶道(2022年3期)2022-04-27
黑龙江大学自然科学学报(2022年1期)2022-03-29
中学生数理化·高一版(2021年11期)2021-09-05
网络空间安全(2019年8期)2019-03-18
CHIP新电脑(2017年6期)2017-06-19
中学物理·高中(2016年8期)2016-08-08