
基于图像处理下无人机拍摄裂缝辅助装置的设计研发
2022-07-15 08:55谢东辉李登华
工程质量 2022年6期
孙 晨,丁 勇,谢东辉,李登华
(1.南京理工大学理学院,江苏 南京 210094;2.宁波原水有限公司皎口水库分公司,浙江 宁波 315000;3.南京水利科学研究院,江苏 南京 210024)
0 引言
先前对于裂缝监测大多采用人工手段与专业仪器结合的方式,通过实际工程应用发现,该方式具有机动性较低、成本较大等特点。尤其在面对高层建筑与水库水坝等复杂工程时,利用专业仪器与人工观测的传统监测方法已经无法满足当下需求。近年来,随着新一轮产业技术革命——“互联网+”和以 BIM 为代表的信息技术的兴起,BIM 技术、无人机、3D 扫描、3S 等信息技术的应用,结合施工机器人的自动化技术,智慧建造正在从理念成为现实[1]。因此,目前利用无人机拍摄采集裂缝照片后以图像处理方式进行自动化监测的方法逐渐广泛。
1 拍摄裂缝检测现状
1.1 人工检查
人工检查的方式较为灵活,但是检测的精确程度有待商榷。虽然目前人工检查通常配备专业仪器进行观测,但在面对水库大坝、特大桥梁等复杂工程时,具有效率低、劳动强度大的特点[2]。更重要的是人工检查的方式存在很大的危险性,如图 1、图 2 所示。

图1 借助皮划艇拍摄裂缝

图2 人工直接观测
1.2 无人机巡检
由于人工检查的方式存在精度较低、危险较大等特点,因此,利用无人机的飞行特性对所需检查建筑物的裂缝进行拍摄观测的方式成为热点,无人机巡检方式多与计算机视觉结合,大量学者通过无人机采集裂缝照片的反馈,利用图像处理技术设计算法,对裂缝进行识别定位。Magsino等[3]设计了一种基于无人机的裂缝快速扫描和识别算法,用于对桥梁表面裂缝的检测。
然而,据目前市场了解,大多无人机带有安全避障系统,如内嵌超声波传感器等方式。避障系统的可调距离为 1.5~3 m(默认为 3 m),即在距离无人机镜头前 3 m 若有障碍物,无人机为悬停状态,无法前进,超声波传感器避障原理如图 3 所示。此系统在多数应用场景下取得了较好的应用效果,但是在结构健康检测领域,常常由于工程结构的限制,为无人机的拍摄巡检带来诸多问题。
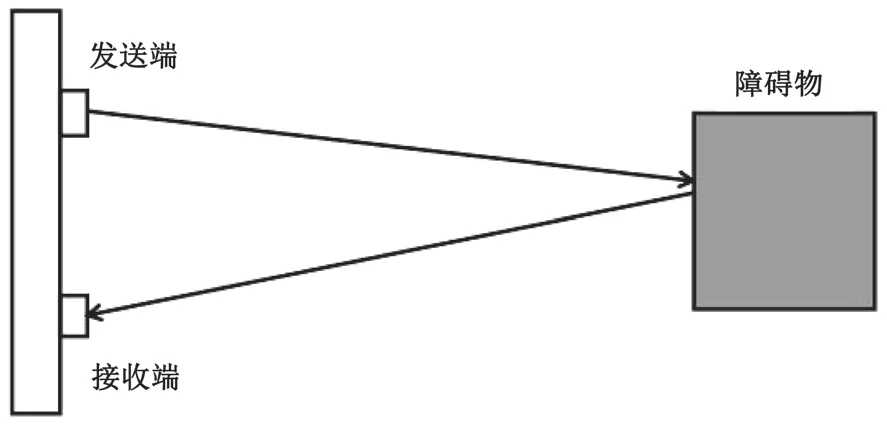
图3 无人机超声波传感器避障原理
由于图像记录的内容大多具有不可重复性,一旦图像质量有了问题,不仅降低观察效果,更关键的是影响信息的获得与提取。采集图像与图像处理相比,重要性丝毫不逊色,有时甚至要求更严格[4]。一方面,在拍摄以裂缝为主要背景的情况下,1.5~3 m 的安全距离无法实现对裂缝的准确拍摄,导致照片精度不高,如图 4、图 5 所示,不利于后续分析图像信息工作的开展,可能会出现裂缝特征提取不完全、提取不准确等问题;另一方面,在不同时刻拍摄的过程中,无法保证每次镜头与裂缝的间距相同,为计算机图像处理带来不便。即使无人机飞行过程中关闭避障系统,虽然实现了近距离贴近建筑结构立面上的裂缝并进行拍照,但在很大程度上会因操作失误而导致坠机意外。

图4 采集照片清晰度较低
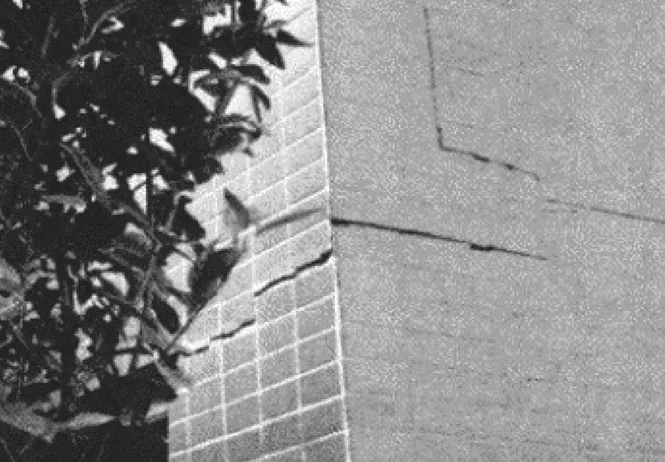
图5 采集照片清晰度较低示意
综上所述,采用无人机与计算机视觉结合监测裂缝的研究路径是具有新颖性与前瞻性的,但是考虑到后期图像处理涉及的图像质量问题,有必要、也亟需研发一种能够实现近距离、高质量采集裂缝照片的装置与方法,以解决上述工程难题。
2 拍摄裂缝辅助装置的设计分析
鉴于目前无人机拍摄裂缝的方式存在一定缺陷,为有效解决该技术问题,经实地调研和深入研究相关规范,设计研发了一种利用无人机实现近距离拍摄裂缝的装置。该装置结构设计巧妙,使用便捷,在保证过程安全可靠的同时,有效提高了采集照片的效率和清晰度。
山东省先后印发了《关于加强海水利用工作的意见》《关于加强污水处理回用工作的意见》等,加大污水处理回用、海水淡化等非常规水源的开发利用,纳入区域水资源统一调度配置。在水资源论证与取水许可审批工作中,对污水处理再生水等非常规水的水量和水质能够满足建设项目用水需求的,优先配置使用非常规水,严格控制取用新水特别是地下水。
2.1 总体设计思路
基于对复杂工程中所出现的裂缝近距离拍摄且保证间距相同,本设计采用无人机加装辅助装置的方式,可以实现在关闭无人机避障系统下,通过装置的保护与压顶作用,将无人机最大近距离地紧贴墙壁裂缝,实现近距离拍摄的问题;同时,通过装置上支架本身距离的恒定,起到距离标尺作用,保证间距相同,相较于软件测距方式,该方法实现成本较低。
此外,在无人机本体上该装置可以有效承受小型碰撞的冲击以提升室内飞行的容错性,保护无人机飞行期间的旋翼安全而不至于发生坠机事故。
2.2 结构组成设计
本装置由两个主要部分构成,即四旋翼无人机、支撑框架。其中,支撑框架由三个方向(竖向、横向、顶端)的轻质杆件构成。装置整体结构正、侧视图如图 6所示。
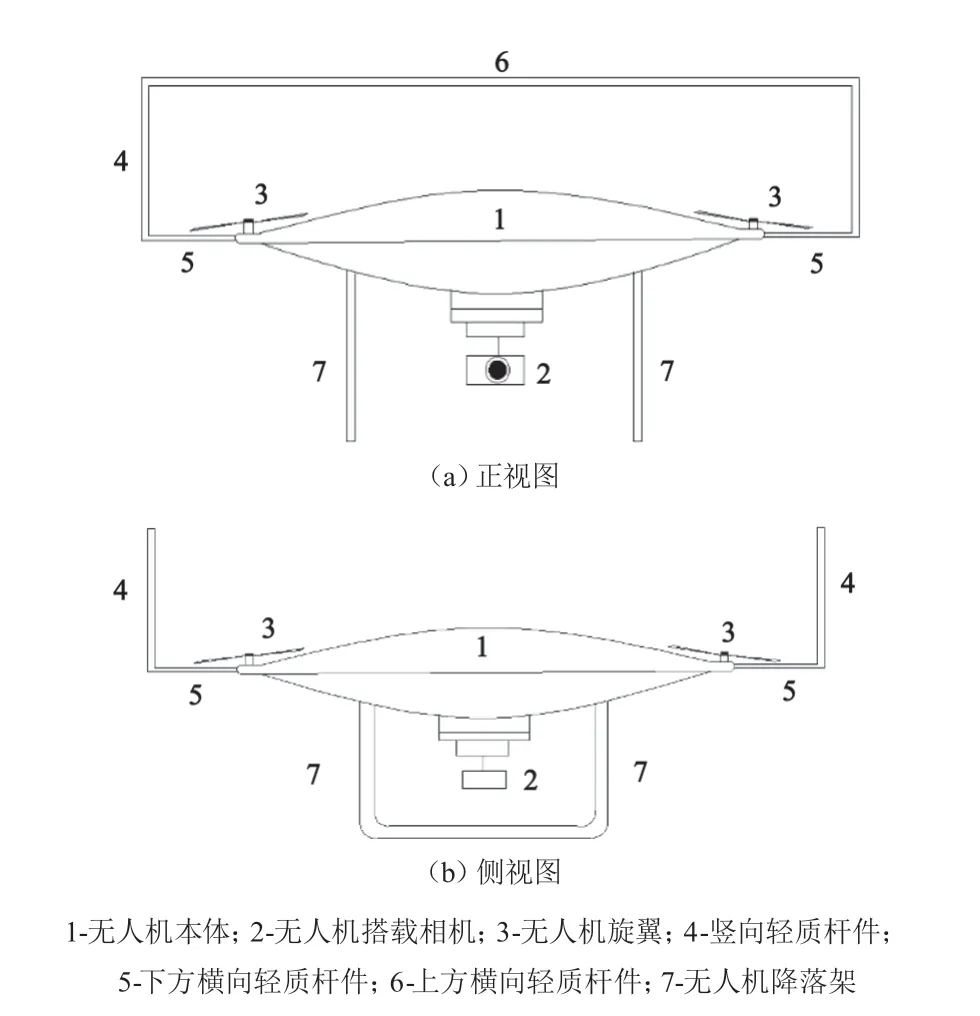
图6 装置总体结构图
2.2.1 四旋翼无人机
对于四旋翼无人机本体而言,首要考虑的是飞行时无人机的载重问题。本装置采用的无人机载重(不含自重)约为 4 kg。主要是基于:支撑框架结构重量为 1.4 kg,数量一对,以此保证无人机的各方向受力平衡,共计 2.8 kg。因此,本装置的搭载总重量约为 2.8 kg,<4 kg,能够满足无人机的载重要求,不会对其升力产生影响,可以保证无人机的正常稳定飞行[5]。
2.2.2 支撑框架
横向、竖向轻质杆件(4~6 号)相互焊接构成一对支撑框架。其中,杆件采用具有轻量化、强度大等特点的材料,使支撑框架具有足够稳定性与柔韧性,避免与建筑结构立面发生碰撞后损坏。无人机在关闭 1.5~3 m 内的安全避障系统后,依靠下方横向轻质杆件(5)、竖向轻质杆件(4)与上方横向轻质杆件(6)构成的支撑框架,让无人机机身在支撑框架的保护下,将无人机紧压在墙壁上,减小了原先墙壁与无人机的间隔。
在结构设计时,为了保证无人机旋翼安全,设计时已经注意了下方横向杆件的延伸距离,即安全距离。在加装此杆件后,不会影响旋翼的转动。
2.3 装置操作方法
为方便工程技术人员更清晰地了解该技术并实施应用,本文总结了该无人机拍摄裂缝装置的操作方法,步骤如下。其中,模拟示意如图 7 所示。
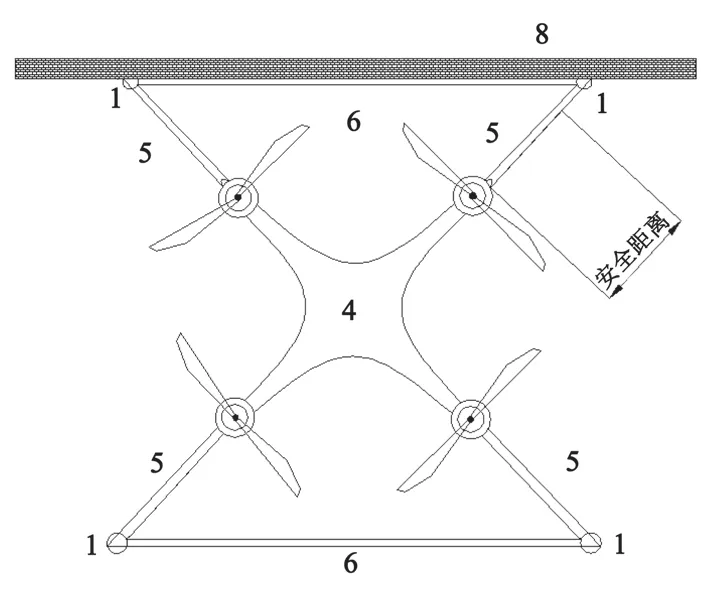
图7 装置使用模拟示意
2.3.1 前期准备
1)装置检查。检查装置的运行状态,确认装置是否运行正常;
2)安装装置。确认无误后,将一对辅助装置分别卡扣在四个无人机旋翼支点,以用来前后保持整体平衡。
2.3.2 拍摄过程
1)裂缝定位。启动无人机,通过无人机的飞行,找到建筑物墙体上存在裂缝的区域,确认裂缝区域所在位置。
2)图像采集。关闭无人机自身的安全避障系统后,加以观察,然后缓慢飞行,在飞行过程中需要注意的是,由于无人机飞行的特性,机身会有微小角度的前倾。通过竖向轻质杆件与上方横向轻质杆件逐步贴近裂缝所在结构立面,同时无人机镜头垂直于裂缝墙面对准裂缝所在区域,使得相机画面尽可能覆盖墙面上的裂缝信息。待机身稳定后,按下无人机自带拍照键,获取裂缝图片。
3)当一个裂缝照片采集完毕后,将四悬翼无人机直线下降,远离建筑结构立面,再小心水平飞行至下一个裂缝附近位置,然后,参照上述步骤完成其余所有裂缝的采集即可。
2.3.3 图片分析
对采集的照片进行整理排布,通过计算机图像处理软件,如利用 Python 编程依次分析图片中裂缝宽度方向上的像素个数与长度方向上的像素个数,根据像素尺寸进而推断出裂缝的宽度与长度。
3 结论
针对复杂建筑结构立面,现有无人机拍摄裂缝的方式不能满足后期精确的图像分析要求而存在准确性和效率较低等工程难题,本文设计研发了基于图像处理下的无人机拍摄裂缝的装置,能够克服现有方法的不足,具有以下优势:
1)该装置巧妙采用由轻质杆件组成的框架结构方式,减小了无人机镜头与立面上裂缝之间的距离,实现了无人机的近距离拍摄,大大增加所拍摄图片的清晰度;
2)该装置的支架中横向轻质杆件充当标尺作用,可以保证不同时刻拍摄时,镜头与对象间距相同,可以确定图片中像素的尺寸大小,进而推算出裂缝的宽度与长度;
3)该装置相较于软件测距方式,该方法实现成本较低、实现便捷,只需要将辅助装置卡扣在无人机上即可实现。Q
猜你喜欢
上海建材(2022年3期)2022-11-04
北京航空航天大学学报(2021年9期)2021-11-02
陶瓷学报(2021年4期)2021-10-14
科学家(2021年24期)2021-04-25
军民两用技术与产品(2021年9期)2021-03-09
建材发展导向(2020年16期)2020-09-25
建材发展导向(2020年4期)2020-03-25
煤(2019年12期)2019-12-12
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
