
某电缆敷设机器人底部散热优化分析
2022-07-16 11:49陈果王仓平
甘肃科技纵横 2022年5期
陈果 王仓平




摘要:电缆敷设机器人可以有效节省人力、提高缆线敷设效率。机器人工作时电机输出功率很大,因此在机器人工作时会产生大量的热量,导致局部温度升高。高温会严重影响电子元件的使用寿命和可靠性,增加故障率,因此对机器人进行热分析和热设计就显得必不可少。本论述将某电缆敷设机器人底部进行模型简化,通过数值计算的方法分析三种散热方式的优劣,结果发现将机器人电源侧开设强迫通风孔可有效提高散热,且换热量随着风量的增加而增大。
关键词:电缆敷设;散热;数值计算
中图分类号:TK11文献标志码:A
0 引言
随着城市建设、工业工程以及5G 技术的发展,电缆线被广泛应用于各个领域。缆线敷设是一项费时费力的工作。通常情况下,地下缆线敷设有3 种形式:土壤直埋敷设、管道敷设和隧道敷设[1]。电缆敷设亦长期存在于核技术工程中,一般情况下,缆线敷设往往采用卷扬机带动钢丝绳牵引电缆的方式进行[2],但这种方式并不完全适合所有作业工况。电缆敷设长度的增加和工况的复杂往往会使电缆损坏[3]。与此同时,缆线敷设过程中的穿缆、收缆等多种作业方式同时进行时需要投入大量人工,且人工作业时往往存在敷设效率低、敷设过程不受控、敷设不安全等缺点。电缆敷设机器人是应运自动控制技术,通过机械手对电缆线抓附,机器人拖动电缆在电缆桥架内行走,电缆到达指定位置后放置在电缆桥架内。电缆敷设机器人不受人为因素、环境因素的影响,机器人行走速度基本恒定,可实现电缆连续、稳定地敷设。同时采用电缆机器人进行电缆敷设仅需要几人便可以完成350 m 电缆工程的敷设,而且敷设质量合格,电缆敷设效率相比人工提高了10倍以上。由此可见,使用电缆敷设机器人敷设电缆时有效率高、敷设过程可控、减少人力、提高安全系数、适用范围广等优点。
工程机器人散热问题往往会影响设备的正常运转,根据有关数据统计,电子产品的失效事故中,大约有 55%是由于高温引起的,而且电子元件工作温度每上升10 K,其平均工作寿命就会减少大约一半[4]。因此散熱问题是电缆敷设机器人设计时必须考虑的因素。风冷和水冷作为主要冷却方式广泛应用于各个机械设备中。电缆敷设机器人的散热设计主要考虑对流强化传热,以强迫风冷的形式提高其换热量。强迫风冷技术广泛应用于电子散热等领域,通常以风扇的形式实现散热。孙柯[5]设计了核救灾机器人热防护系统,并对机器人的热防护设计的适用性及经济性进行了评估。
本论述以某电缆敷设机器人的底部散热设计为研究背景,机器人底部为主要发热部位,为此简化出电缆敷设机器人底部散热模型,为其设计3 种强迫风冷方案,采用数值计算的方法进行验证,确定最优方案,为电缆敷设机器人散热系统设计提供理论依据。
1 物理模型与假设
由于电缆敷设机器人发热元件均在底部,故将其底部模型简化,从而进行底部散热优化。为简化计算过程,节约计算资源,对底部模型进行简化,简化时删除小特征零部件、倒角、圆角及螺栓等对流场影响较小的特征,同时保留主要几何特征,使机器人底部内流场基本不改变。电缆敷设机器人底部物理模型如图1 所示,长1 700 mm、宽800 mm、高510 mm,其中在机壳里包含的发热元件主要有1 个锂电池、4个电机和1 个电源。需要指出的是,机器人发热部件远比上述部件多,部分发热原件位于机器人外部如驱动电机等,此模型仅考虑底部流场内的散热问题,忽略外部发热源以及内部微小发热源。
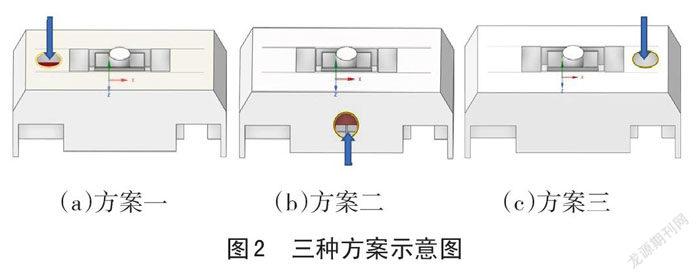
底部冷却设置采用强迫风冷技术进行散热,为提高冷却效率。现提出三种强迫风冷方案。方案一:锂电池上方进口进风;方案二:安装电源侧进风;方案三,机器人尾部正上方机壳开进风孔。三种方案对应进风口的示意图如图2 所示。三种方案进风口的面积相等,均为0.0314 m2。将底部上表面的开口进行密封处理,单独研究机器人底部内流场结构。
2 控制方程及边界条件
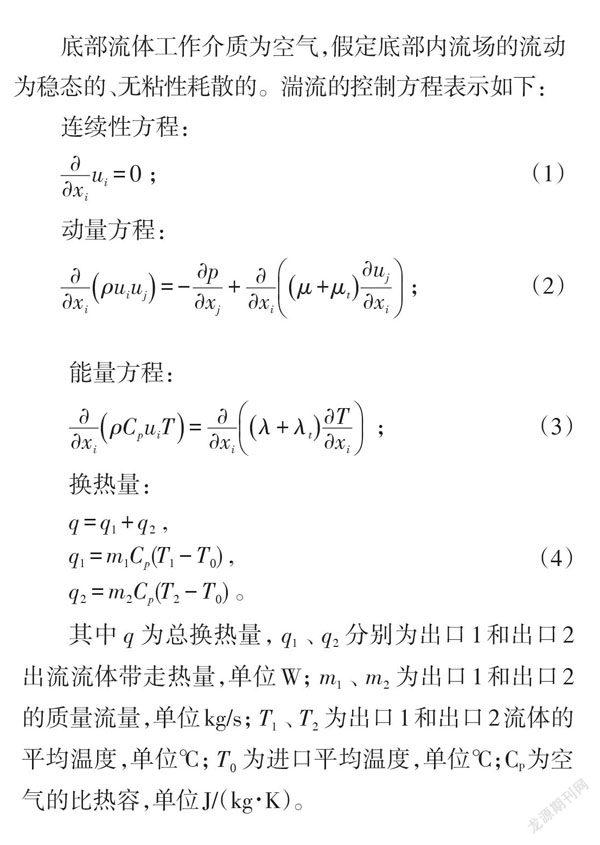
底部流体工作介质为空气,假定底部内流场的流动为稳态的、无粘性耗散的。湍流的控制方程表示如下:
其中 q 为总换热量,q1 、q2 分别为出口1 和出口2 出流流体带走热量,单位 W;m1 、m2 为出口1 和出口2 的质量流量,单位 kg/s;T1 、T2 为出口1 和出口2 流体的平均温度,单位℃;T0 为进口平均温度,单位℃;Cp 为空气的比热容,单位 J/(kg∙K)。
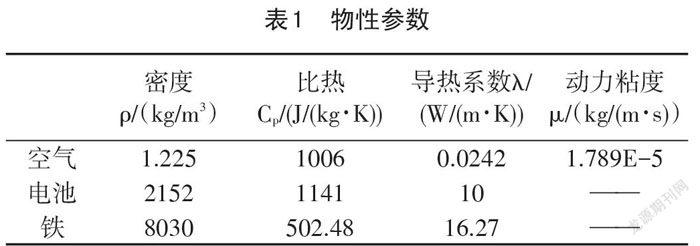
边界条件:进口为速度进口(velocity-inlet),将质量流量根据进口面积和密度换算为速度;进口的空气温度为25℃;出口为压力出口(pressure outlet)边界,锂电池、电源、发热电机为机器人底部主要热源,假设其表面温度恒定为75℃,各部件材料的物性参数见表1 所列。
3 数值计算
3.1 数值计算方法与网格独立性考核
缆线机器人底部散热模型在进行 CFD 仿真时采用 SIMPLE 算法作为压力速度耦合求解器,动量项、湍动能项、湍流耗散项、压力及能量项均采用二阶迎风格式以保证计算精度,梯度项采用最小二乘单元法,能量方程和其他方程的残差值设置为10-6。湍流模型选取 k-ω SST 模型。网格划分采用四面体网格,网格结构如图 3所示,网格数量对于计算结果的影响即网格独立性仍需考核,当风量为0.231 kg/s 时,对于方案一的散热模型,不同网格数量下总换热量的变化及算数平均误差见表2 所列,可以发现随着网格数量的增加,算数平均误差不超过6%,因此网格对于计算结果的影响较小,为平衡计算机资源,选择网格数量为100万左右进行数值计算。
3.2 结果讨论
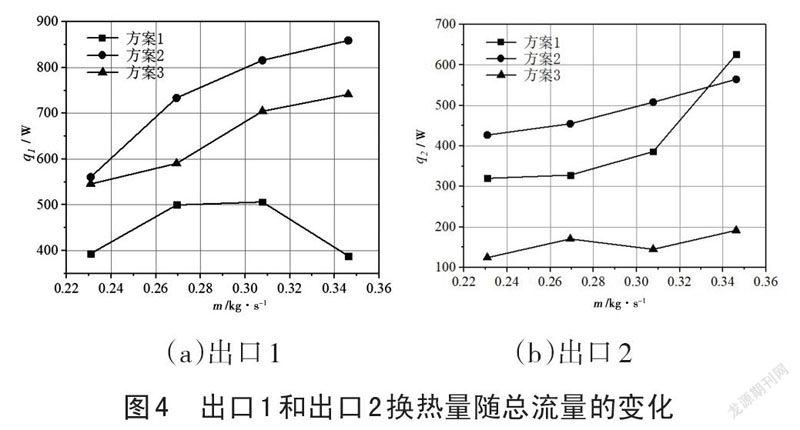
对上述3 种散热方案进行数值计算,以评价3 种方案的优劣。图4 (a)为出口1 换热量随着总质量流量的变化过程,发现方案二对应的出口1 的换热量优于方案三,且优于方案一;图4(b)为出口2换热量随着总质量流量的变化过程,可以发现方案二对应出口2 的换热量在流量较低时优于方案一,而在流量为0.348 kg/s 时,方案一优于方案二,出现这种情况的主要原因在于随着流量的增大,方案一对应的出口2 的流量增大,这与内部气流涡旋有关。综上可见,对于两个出口,方案二均优于方案三和方案一;就方案一和方案三对比而言,方案一使更多热量从出口2 流出,方案三使更多热量从出口 1流出。
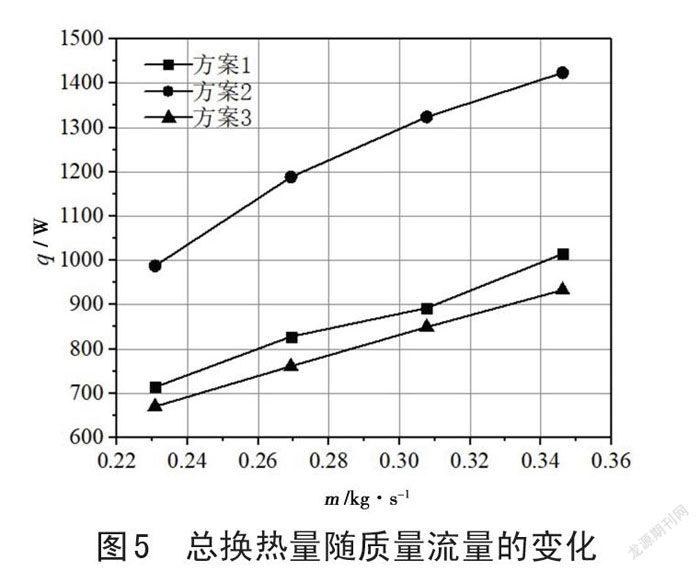
图5 为总换热量随质量流量的变化,可以发现随着流量的增大,总换热量在逐渐增大;方案二的总换热量大于方案一且大于方案三,由此可见在进口风量相同的前提下,对比三种方案只改变通风口位置时,将开口位置设在电源侧时,其换热量最高,因此方案二为最优方案。
为了进一步研究方案二对于机器人底部散热的强化传热过程,图6 展示了流量为0.308 kg/s 时方案二对应的流线图。由于电源与底部的两个电机均为热源且距离相近,强迫通风进口垂直流向电源及两个电机可有效增强对流换热,流速减小的同时流体沿着两侧流出并将热量带走。同时部分风量流经背面另外两个电机,以达到强化传热的效果。由此可见,将进风口布置于发热元较多的一侧完全合理可行。
图7 为方案二的模型在 x=-590 mm、x=-400 mm、 x=-200 mm、x=0 mm、x=200 mm、x=400 mm、x=600 mm、 x=800 mm 截面处的温度云图分布,此时对应的进口质量流量为0.308 kg/s 。从温度云图可以看出,将进风口设置在电源侧时,空气从进风侧流入两侧及背面之前与发热电源及电机产生热交换使得空气被加热,因此进风侧空气的温度低,流至背侧的空气被加热,温度相对较高。为了清楚地显示温度分布,将温度云图的标尺定为 300 K 至320 K,实际标尺为298.15 K 至348.15 K 。被加热的空气均匀地从两侧出口流出,由此可见,方案二使空气尽可能均匀地被加热后从两侧排出,其换热量大大增强。
4 结论
本论述对于某电缆敷设机器人底部散热提出三种强迫冷却方案,通过数值计算的方法进行分析,得出以下结论:将强迫通风进口位置定于电源侧(方案二)为最优方案,此时机器人底部出口风量带走的热量最多,方案一次之,方案三的總换热量最小。但无论何种方案,总换热量随着进口风量的增加而增大。
参考文献:
[1] 王雅妮,张洪亮,吴建东,等.不同敷设方式下高压直流电缆温度场与电场仿真计算研究[J]. 绝缘材料,2017(7):71-78.
[2] 张岩. 超高层建筑电缆垂直敷设综合施工技术[J]. 建筑技术,2012(2):136-138.
[3] 张华.海淀500 kV 电缆工程的技术研究与应用[D]. 北京:华北电力大学,2014.
[4] 戴宗宝. 仿人机器人用多路集成伺服驱动系统散热建模及优化[D]. 哈尔滨:哈尔滨工业大学,2018.
[5] 孙柯. 核救灾机器人电子器件热防护系统研究[D].上海:华东理工大学,2017.
猜你喜欢
卷宗(2016年10期)2017-01-21
商情(2016年43期)2016-12-26
电子技术与软件工程(2016年20期)2016-12-21
企业导报(2016年13期)2016-07-19
科技视界(2015年25期)2015-09-01
科技视界(2015年25期)2015-09-01
