
基于北斗卫星导航的大机关键零部件数据采集及通信系统的研制
2022-08-10 02:22张世红高春雷何国华周佳亮徐济松
科技视界 2022年16期
张世红 高春雷 何国华 周佳亮 徐济松
(中国铁道科学研究院集团有限公司铁道建筑研究所,北京 100081)
0 引言
根据国家铁路局发布的《2020 年铁道统计公报》中指出,截至2020 年12 月底,全国铁路营业里程达到14.63 万公里,其中高铁3.8 万公里,稳居世界第一。目前,我国250km/h 及以下时速主要使用有砟轨道结构,具有铺设简便、造价低廉、易于维修等优点,对有砟铁路线路的养护维修,主要通过大型养路机械进行作业,有效减轻了传统养护工作的负担,基本能满足日常的线路维护需求,使轨道线路满足线路设计标准和线路维修规则的要求,保障线路的运营安全。
随着我国铁路运输规模的提高、列车运行速度的提高、运营密度的增大,使得线路养护维修作业量不断增加, 而允许的养护施工作业时间却越来越紧凑。因此,一方面,需要投入更多数量的大型养路机械按时完成规定的作业量;另一方面,对大机作业效率和可靠性的要求越来越高。 随着大型养路机械的大规模使用,作业区间范围不断扩大,铁路工务段对铁路大型养路机械的监控管理的难度日益增大,尤其是在高原、山区、戈壁滩等人烟稀少的地区,很难通过2G/3G/4G 等基于地面基站的公共网络传输数据,同时,大型养路机械各系统时间不一致和定位精度不高也影响着行车组织、系统安全和故障等数据的分析。 2020 年6 月23 日北斗卫星导航系统已正式完成全球组网,并提供定位、授时及短报文通信等基础服务。 研究北斗卫星定位、授时和短报文通信技术应用于铁路大型养路机械,对实现远程管理,辅助大型养路机械精细化、智能化管理具有十分重要的意义。
1 总体设计方案
总体技术设计方案主要分为感知层、网络层和应用层三部分,如图1 所示。 感知层主要包括数据感知传感器、位置定位设备、MCU 单元、北斗发送模块、公网发送模块等; 网络层主要是指北斗RDSS 短报文通信网络和4G 无线网络; 应用层主要是指大型养路机械作业数据管理平台。
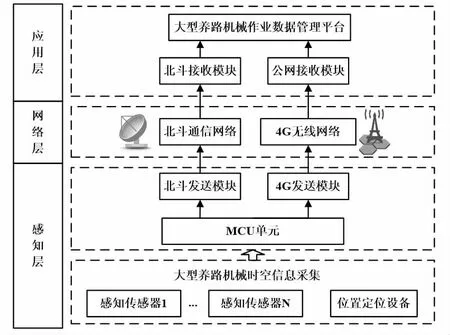
图1 总体设计方案
2 关键技术
2.1 感知层—时空信息采集
2.1.1 时空信息分析
目前广泛使用的大型养路机械设备类别主要包括清筛机、配砟整形车、捣固车、稳定车、打磨车等设备,且每台作业机械拥有唯一的设备编号。 为了提高线路养护维修作业效率,在天窗点作业期间,多种类型大机械设备会同时在铁路线路开展施工作业,对于管理部门而言,需要动态掌握大机作业设备的实时数量、作业位置、作业正常/故障状态、核心零部件运行参数等重要设备信息。
以QS-650 全断面道砟清筛机为例, 目前全路共有120 多台,已经成为道砟清筛主力机型。 工作原理是通过柴油机驱动、全液压传动的方式,利用挖掘链的扒齿切割道床上的道砟,并进行道砟振动筛分。 为了对清筛机的作业状态进行分析, 依据GB 25330—2019《道砟清筛机》国标要求,选择其关键零部件性能参数进行实时监测。 具体监测参数如表1 所示。
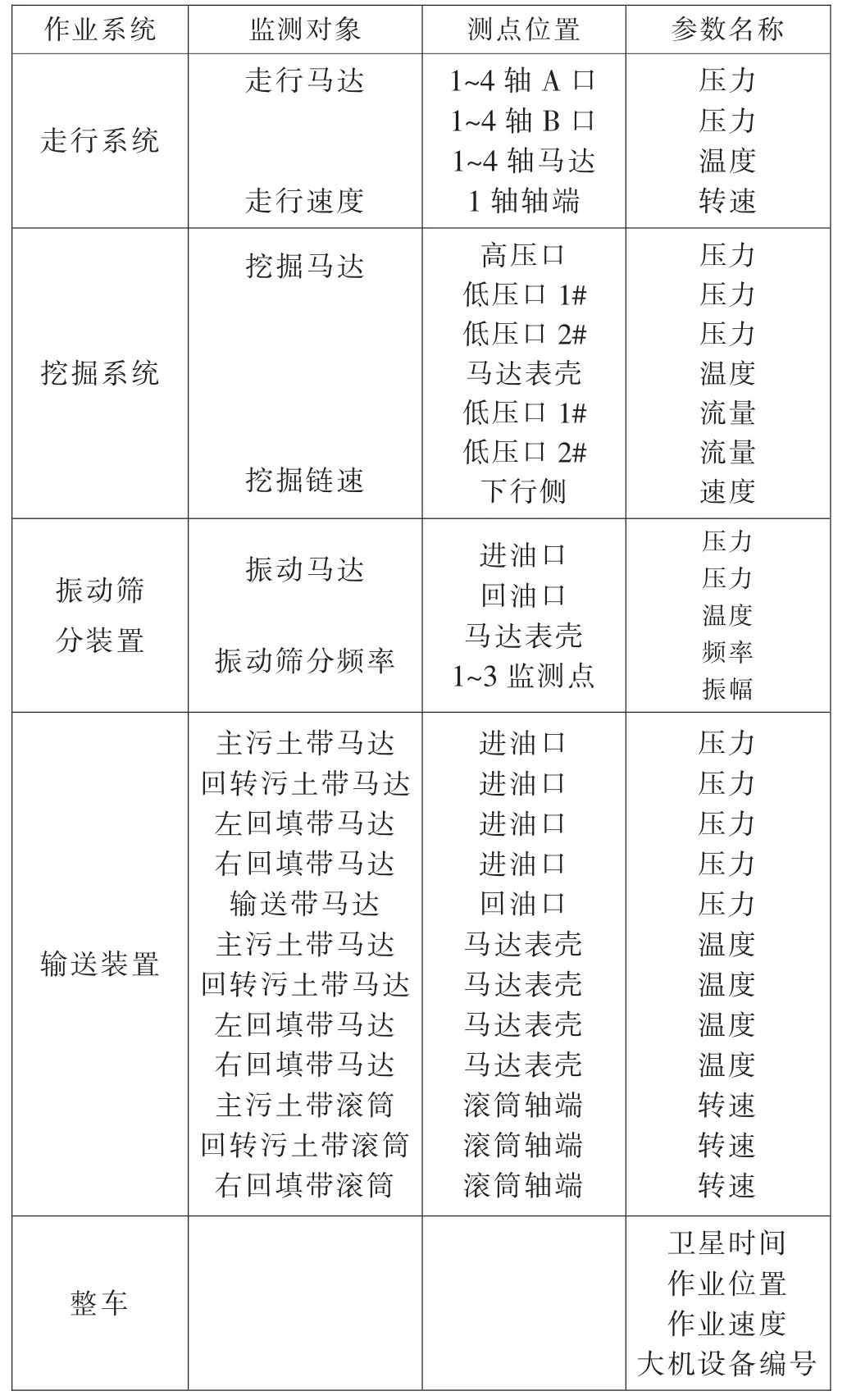
表1 QS-650 全断面道砟清筛机监测参数
2.1.2 时空信息采集
BDS 具有两种工作模式,卫星无线电导航业务(Radio Navigation Satellite System,RNSS)模式虽只能进行定位,但可实现每秒定位,卫星无线电测定业务(Radio Determination Satellite Service,RDSS) 模式可同时进行定位和双向短报文通信,详见图2。
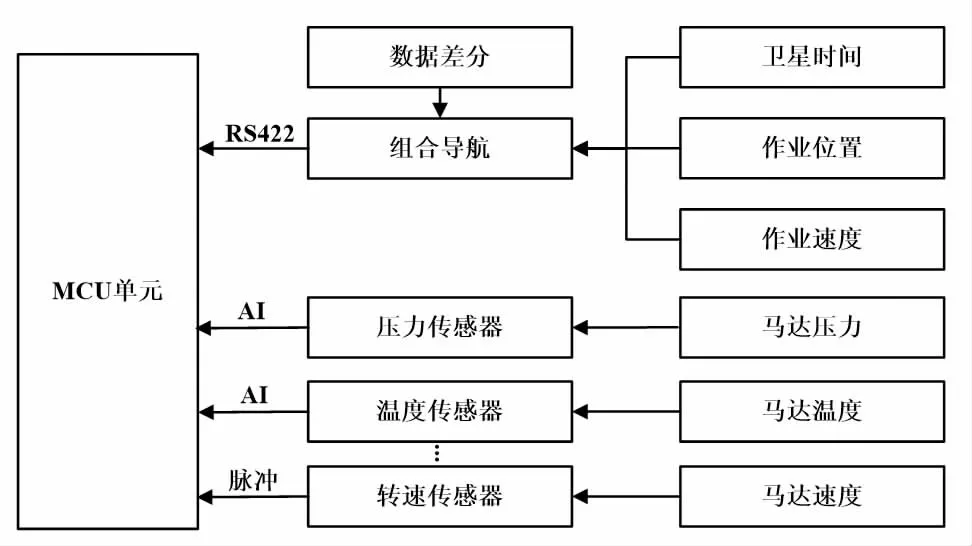
图2 时空信息采集方案
惯性导航系统(Inertial Navigation System,INS),是一种以陀螺仪和加速度计为敏感设备求解导航参数的系统,解算得到运载体的位置、速度等信息,优点是不依赖外部信息,不向外界传递信息,工作时不会被信号或无线电干扰,短时间内精度较高,解算时间快,缺点是误差随时间而累积。
组合导航关键技术是将不同系统的导航数据以最优的滤波算法进行有机融合,卫星导航的高精度可以弥补惯性导航误差迅速发散的问题,惯性导航的自主性也可以填补卫星导航易受干扰、稳定性差等的不足。 尤其在卫星信号被遮挡导致接收机无法定位的情况下,如隧道、峡谷等特殊区域,惯性导航能够继续输出定位结果,直至信号恢复。 在无法接收卫星信号和低信噪比等环境下,组合导航可以提供比单独任何一种系统更精确的导航结果, 再融合数据差分技术,获得更高精度的定位。
2.2 感知层—时空信息处理
运用嵌入式技术和现代滤波技术,对时空信息进行采集和处理, 因北斗短报文通讯传输频率为1 次/min,单次只能传输78 个字节, 因此为了传输所有采集时空信息,需采用分包处理。根据谷军霞进行的北斗短报文丢包试验结果显示,当分包数量为2 个时,实际测试数据传输成功率为88.8%,且分包数量越多,传输成功率越低。 为了提高数据传输成功率,减少分包数量,采用数据压缩的方法。 数据压缩技术的原理本质上是利用数据的冗余性。将数据的冗余压缩到最小的同时,尽可能地减少数据的失真程度,从而达到节约存储空间、提高传输效率的目的。 按照压缩后的数据是否存在信息损失, 数据压缩技术根据压缩后的数据是否存在信息损失, 分为有损压缩和无损压缩两种。
大型养路机械时空信息包含时间特性, 属于工业过程数据的范畴, 需要结合自身数据特点选择压缩算法。 目前常用无损压缩算法分为基于统计的压缩算法(Huffman 编码、动态哈夫曼编码)和基于字典的压缩算法(LZ77 算法、LZ78 算法、LZSS 算法、LZW 算法)。
2.2.1 Bool 类型状态量无损压缩
Bool 类型状态量的无损压缩是通过将多个状态量移位到一个字节中,可以达到1:8 的高压缩比。 如图3 所示。

图3 Bool 类型状态量无损压缩过程
2.2.2 Int 类型数据无损压缩
Int 类型数据无损压缩过程如图4 所示。
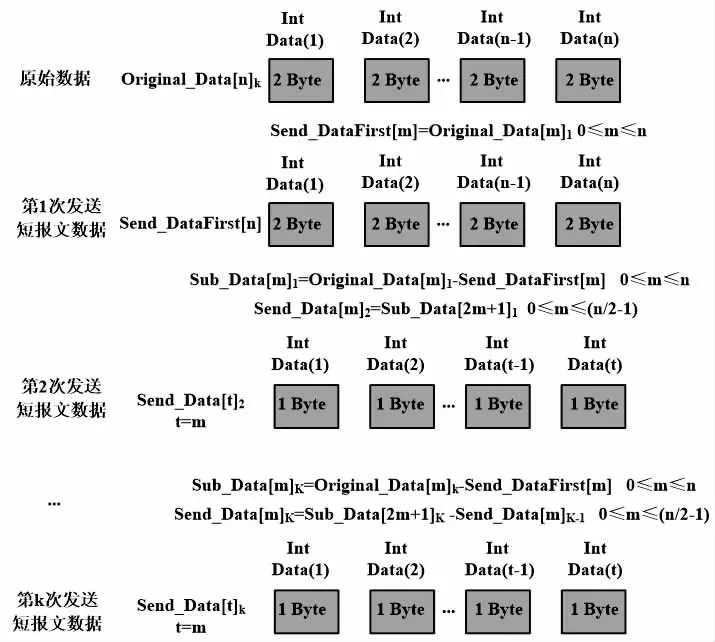
图4 Int 类型数据无损压缩过程
无损压缩和解压缩过程互逆,实现Bool 类型状态量数据和Int 类型数据的无损传输,传输数据不失真。
2.3 网络层—数据传输技术
采用北斗RDSS 短报文通信+4G 无线公网双通道进行数据传输,RSDD 数传终端内部集成短报文通信模块、4G 透传模块和BDS/GPS 双模定位模块。 在4G网络信号较弱时,可以通过短报文进行数据传输。数据传输技术方案如图5 所示。
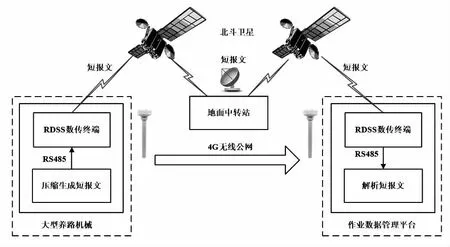
图5 数据传输技术方案
北斗RDSS 短报文通信中, 每个数传终端中都内置一张北斗通信卡,拥有唯一的ID 编号。 数传终端性能指标如表2 所示。
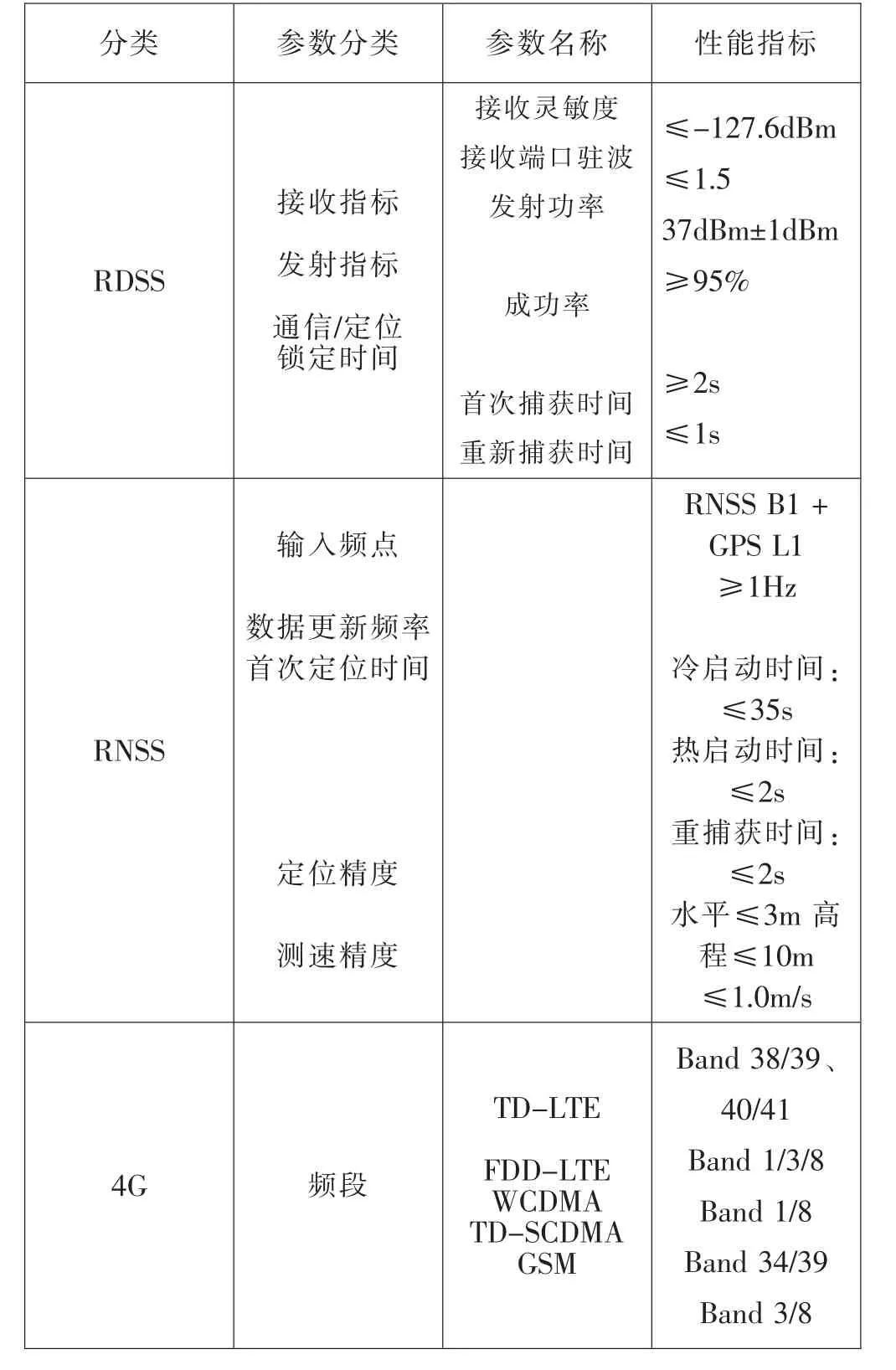
表2 RDSS 数传终端性能指标
2.4 应用层—作业数据管理平台
大型养路机械作业数据管理平台结构如图6 所示。
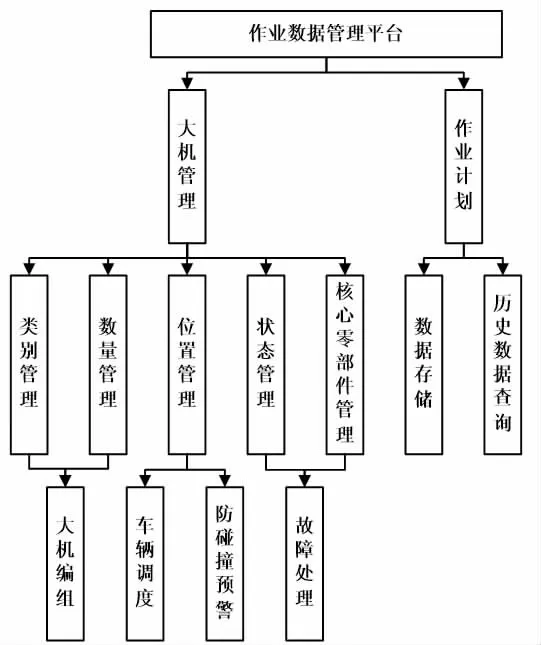
图6 作业数据管理平台结构
通过作业数据管理平台, 可以实时查看大机作业位置、核心零部件关键性能参数、作业计划等重要数据。
3 结语
本系统基于QS-650 全断面道砟清筛机, 完成了对影响清筛效果的核心机构零部件的性能分析、数据采集、数据传输、数据解析、数据显示等内容的研究,利用北斗/GPS 双模定位技术融合惯性导航技术,在数据差分模式下,实现大机作业位置的准确定位。 采用北斗RDSS 短报文通信和4G 无线网络双通道方式完成公网信号未覆盖区域或信号较弱区域的大机作业定位和关键数据的传输。 通过大型养路机械作业数据管理中心平台实现大机的状态监测、数据存储、历史数据查询等功能,为将来进一步运用大数据、云计算、5G 等先进技术平台,实现智能大机编组、车辆调度、防碰撞预警、故障处理、核心零部件寿命预测等提供强有力的数据保障。
猜你喜欢
铁道建筑(2019年11期)2019-12-05
布达拉(2019年6期)2019-07-18
减速顶与调速技术(2018年4期)2018-08-27
铁道通信信号(2018年1期)2018-06-06
选煤技术(2018年6期)2018-03-04
北方人(2017年10期)2017-07-03
中国公路(2017年12期)2017-02-06
大陆桥视野·下(2016年1期)2016-03-15
大陆桥视野(2016年2期)2016-03-11
现代机械(2015年5期)2016-01-16
