
基于行为构建的城市轨道隧道爬壁钻孔机器人交互界面设计
2022-08-12 13:19中铁八局集团电务工程有限公司胡基冬白林
工业设计 2022年7期
在城市轨道交通隧道施工过程中,需要在隧道壁面上进行大量的钻孔工作,从而敷设通信电缆、紧急疏散平台、信号光缆等部件。目前该工作全都由人工手动完成,在钻孔作业施工过程中,工人需要在较高的隧道壁面上进行支架搭建、高空作业甚至悬挂作业,其作业负荷和安全隐患较为严重。例如,在21km 长的地铁隧道中,就需要进行不同深度、不同大小的钻孔共计620000个
。随着我国城市轨道交通建设的快速发展,地铁隧道占比越来越多,地铁隧道牵引供电接触网、侧壁电缆、管道以及紧急疏散平台等机电安装均需要在隧道壁上钻大量的安装孔,但目前仍主要采用人工划线、作业平台辅助人工手持钻孔作业模式,存在很多问题,如:(1)人工钻孔依靠个人经验,难以保证钻孔洞的位置、方向、深浅等;(2)大部分安装孔都处于较高的位置,作业难度大、作业效率低、且存在安全隐患;(3)隧道壁中预埋了大量钢筋,钻孔作业时只能进行试探性钻孔,大大影响了钻孔效率;(4)钻孔数量庞大,往往需要临时雇用大量技工,成本高且难度大。为了解决以上问题,可以使用城市轨道隧道爬壁钻孔机器人,通过工人在隧道中对机器人实时操控进行钻孔作业,从而提升钻孔效率,消除安全隐患
。然而,这种远程式的操控模式,又形成了新的智能设备人机交互问题,如工人在使用手持操控器或者平板电脑交互界面时需要防止误触行为等,这就需要对交互行为进行设计。基于此,文章将基于行为构建理论进行适应场景需求的交互界面设计研究。
1 行为构建概述
在人与产品交互的过程中,产品需要对用户的行为作出交互反应,首先就要感知用户的行为
。就如同交互的名称interaction 中,inter 是相互的意思,action 是行为和动作的意思,智能交互产品设计最关键的设计因素即为行为设计。其中,产品实体作为行为的触发和实现媒介,行为即为实体和人的链接方式。而行为的设计主要基于用户的情感和体验。就如同辛向阳所说:人、动作、工具或媒介、目的和场景构成交互设计的五要素
。交互设计过程中的决策逻辑也主要采用行为逻辑
。
根据Fogg 提出的FBM(Fogg Behavior Model,福格行为模型,以下简称为FBM)行为模型
,行为包括三个基本要素:激励、实现能力和触发条件。其中激励是行为发生的动机,而动机的本质即为满足用户的本能需求,以及在此基础上满足用户情感和个人实现等方面的更高需求,这就需要通过用户研究发现用户的基本愿景和设计情境
。实现能力意味着行为设计需要遵循一定的人因设计规则,并根据用户愿景设计符合设计情境的行为特征
。触发条件指的是行为的触发点设计需要具有学习成本低,容易接受的特点,这就需要利用行为观察分析等设计方法获取用户习惯,并设计直白自然的行为触发点
。因此,构建良好的行为设计可以更好地改善用户与设计物的交互效果,尤其在目前的实体交互逐渐增多的设计情境中,行为构建能够更好地促进用户与设计物的沟通和感知。
2 交互界面设计概述
交互界面指的是人与世界沟通的媒介,不仅仅限于视觉界面,还包括行为、肢体、听觉等多种通道界面。在交互设计领域,以UI(User Interface,用户界面,以下简称为UI)为交互主体的界面形式逐渐消失,键盘鼠标等传统交互工具渐渐弱化。学习成本更低、交互方式更为自然的非桌面和非屏幕式的实体交互正在逐步完善。国际工业设计协会(ICSID)将工业设计的目的定义为旨在引导创新、面对设计情境重新解构问题,并建立更好的产品、系统、服务、体验机会
。在这种理念的号召下,交互界面设计的范畴和适应性得到了极大地扩展,传统的交互界面设计视角也从“生产”转为更深层地对于人的需求的关注。在这种设计情境中,设计师在设计时首先需要关注的是设计的目的,以及引发的人类行为和合理体验,而不再将设计重点放在简单地满足产品功能上
。相应地,全新的交互方式也从传统的指令—执行的功能满足性交互方式转变为非线性的,能够根据设计情境与人产生互动和交流的智能交互方式。
3 基于行为构建的城市轨道隧道爬壁钻孔机器人交互界面设计意义
文章可以有效推动行为构建理论与实践方法研究,在设计过程中利用对于产品相关的行为动机、触发以及实现能力等理论获取能够直接应用于交互产品的典型行为。在基于行为构建的交互界面设计的同时,也从实践角度对基于行为构建的交互界面设计方法进行验证。文章可以丰富交互设计理论体系,并为以行为表现为特征的新型交互模式提供理论和实践参考,并在应用实践上提升隧道交互作业效率,降低特殊环境中的安全隐患。
4 基于行为构建的城市轨道隧道爬壁钻孔机器人交互界面设计流程
基于行为构建设计基础理论,通过激励设计、情境设计探查了真实的用户愿景和产品愿景,而后基于行为观察方法进行了典型行为设计与生成,最终形成了城市轨道隧道钻孔爬壁机器人交互界面原型设计。具体流程如下:
4.1 激励设计
夏季的庐山很热闹。合面街是最繁华的商业街,从合面街到河南路口是单面街。河南路口对面,现在的振豪超市,原是赫赫有名的胡金芳大旅社,门面后背的一大片房屋也属于它。观光客多选择在这里住,临街近,方便。当年的胡金芳大旅社声名远播,生意远胜于仙岩饭店。
情境设计阶段的目的在于基于激励设计阶段得到的产品愿景,通过用户参与式情境挖掘等方式获取对行为设计有影响的设计情境和初步的解决方案,具体内容如下:
用户研究方法中的行为观察法经常被用来统计在操作各种任务功能时频率最高的交互行为
。基于设计愿景和设计情境及其解决方案,以FBS 行为模型内容作为设计准则,参考Vanden等研究中提到的交互行为设计条例
,设计生成了以下典型行为,主要包括:(1)位置操控行为,主要采用上下左右的按键对机器人位置进行调整,并在机器人进入不可钻孔区域时,通过逐渐急促的振动和灯光传递警示信号,由于位置操控行为操作频率较高,为了便于拇指操作,作用区域主要位于控制器的右部;(2)确定行为,主要采用按钮点击来确定在该位置钻孔,基于Alalwan 等的经验
,为了防止误触,按钮部位位于控制器的上部。伴随着确定行为,会有灯光实时反馈;(3)取消行为,主要采用按钮点击来取消钻孔操作,其操作频率比确定行为更低,因此取消按钮位于控制器上部,此外伴随着取消行为,会有实时反馈。
基于以上设计情境,采用行为观察和参与式设计的方式获取在以上情境中能够传递和表达信息的典型交互行为,并要求这些设计行为能够直接对交互设计产生影响。为了让交互行为操作更为简单,每种情境只采用一种最典型的行为。在具体的操作方法上,采用影随(Shadowing)的行为挖掘方法。最终总结得到初步的任务功能即:(1)感受设备状态,涉及定位情境和唤醒情境,研究发现工人们需要能够实时感受到设备状态(如运行正常/故障等),并需要直观地对设备状态和突发状况有所了解和预知;(2)当前位置的可钻孔状态,涉及正面和负面情境,能够实时显示当前位置是否能够进行钻孔;(3)执行和取消状态,涉及正面和负面情境,分别表示对钻孔操作进行确定,以及进行取消操作;(4)位置操控,能够控制爬壁机器人在隧道壁上进行二向移动,从而寻找最佳的钻孔位置。
纵观中外教师形象差异时,可以发现西方更加强调教师智慧,教师不仅仅传授知识,更是对学生进行启迪,对学生思想产生影响;中国则更加强调教师师德,“德高为师”这是这一形象的生动写照。从苏格拉底“产婆术”,夸美纽斯“班级授课制”,第斯多惠“教师终身自我教育以及孔子的“有教无类”,陶行知“生活教育”都折射出教师智慧的运用。执教于西南大学近50年的黄希庭教授,堪称“凝心静气做学问,为人师表带学生”教书育人楷模,半个世纪的潜心耕耘,教书、育人、科研“三位一体”,成为了中国知识分子闪耀的光芒,他在为师、为人、为学方面彰显了师者风范。

4.2 情境设计
将车辆推置于称重轨上,称重轨上有8个载重台,载重台将轮对举升,通过传感器测得各轮重,根据轮重数据指导工人进行调平。调平的方法有两种:一种是在轴箱弹簧处加垫片,一种是调节空气弹簧高度调整阀。由于在轴箱弹簧处加设垫片的操作复杂,因此优先通过调节空气弹簧高度调整阀来调整轮重。工人打开一辆车对角的空气弹簧高度调整阀来调节轮重,轮重数据实时显示在控制室,当轮重差符合要求后,停止调节;若不能调平,则在轴箱弹簧处加设垫片,再调节空气弹簧高度调整阀来调平轮重,如此重复直到调平,若始终不能调平,则该车不合格。
激励设计部分的研究主要目的在于理解用户并获取用户愿景
。其中最关键的步骤就在于如何发现目标用户在实际生活中遇到的关键痛点,并在后续的设计中对设计痛点进行解决。采用的主要手段就在于通过对用户真实工作场景的深入,在自然的工作环境中让研究人员移情式地沉浸在真实情境中,从而发现用户的关键需求和关键问题。如用户在操控机器时最喜欢什么样的交流方式;以及不同工作情境下的用户是否存在相似的需求等等。
电气、数字化与自动化-汽车行业正在面临颠覆性变革,先进的电池与电子电气技术正在重塑汽车设计与制造。汉高下定决心要在本次转型中发挥决定性作用,以帮助客户推动电动交通的未来,并从公司的全面产品和服务组合中获益,在整个组件价值链中提供高效、可靠、安全且可持续的解决方案。
首先,进行概念生成的用户参与式情境挖掘,在用户参与式挖掘过程中,设计师、主试与目标用户组成设计小组;其次,由主试引导目标用户进行头脑风暴,设计师在参与头脑风暴的同时,需要将用户提出的可能解决的方案和情境用设计草图的方式表达出来,并在第一时间提交给用户确认,并根据用户的意见进行实时修改。在参与式设计完成后,由主试和设计师对设计情境和方案进行整理,最终得到了四个主要的设计情境(图2)。其中包括:(1)定位情境,用户需要控制机器在两轴坐标中的位置,并能控制其进行选址,而且表达存在的行为方式是动态的(即不是有或无这种简单的状态切换);(2)正面情境,在作出肯定处理的时候,需要有一种交互行为模式将自己表达肯定的动态传递给设备,交互模式应该是具有肯定含义的;(3)负面情境,当认为并未达到预期目标时,需要有一种交互行为模式将自己表达否定的动态传递给设备,交互模式应该是具有肯定含义的,并且负面情境具有转为积极情境的能力;(4)唤醒情境,可以随时启动或者停止,并通过交互行为媒介向设备传递信号。

而后采用进阶式访谈获取进一步的用户信息(图1)。进阶式访谈是用户体验领域的一个重要的信息获取方法
,通过不断地对被试进行“为什么”式的发问,逐步深入地挖掘被试真正的目的与期望。该方法能够提供清晰的信息获取脉络,并且能够构建体验和功能之间的显性联系。而后通过语义信息收集和分析,就可以总结并得到产品愿景,后续的行为构建需要将产品愿景作为设计的终极目标和标杆进行设计。研究得到的产品愿景为:(1)用户(工人)需要一个能够实时传递机器状态的媒介,传递方式是不需要低头操作的;(2)能够实现双方除语音视频通道之外的交流;(3)具有较低的学习成本和自然的触发机制。
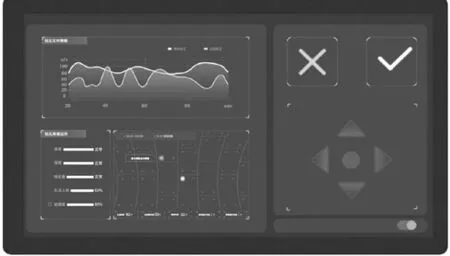
基于以上研究获取的典型行为和用户愿景与设计情境,将行为构建的结果作为智能交互产品原型的设计目标,将智能平板作为交互产品的承载平台,通过交互界面设计完成隧道钻孔爬壁机器人的交互原型设计。最终完成的原型交互界面如图3 所示。该界面位于平板控制器上,通过该界面操控爬壁机器人进行钻孔操作。主要分为位置调整、确认钻孔、取消操作、钻孔数据监测等界面模块。这些模块的设计特征为:(1)位置调整模块,位置调整模块的交互频率和强度较高,为了适应用户的右手行为习惯,位置调整模块位于交互界面右侧,保证用户可以单手交互。此外,此模块尺寸较大,这是为了满足用户在佩戴手套时导致的“胖手指(fat finger)”需求;(2)确认钻孔和取消操作模块,确认钻孔和取消操作模块交互频率较低,其中确认钻孔的交互频率要高于取消操作,因此将确认钻孔的交互按钮设置在屏幕右侧,从而便于用户操作;(3)钻孔数据监测模块,由于数据展示不需要交互操作,因此将其设置在界面的左侧位置,主要用于实时展示当前的钻孔数据、机器人定位数据以及任务数据等信息。
4.3 典型行为设计与生成
为了更好地移情于目标用户,首先采用用户访谈的方法让研究人员更好地了解用户
。在正式访谈之前,给目标用户发放了情况调查表和一天生活日志调查表,需要目标用户在一周内完成对典型的一天以及基本信息的描述,并将其返回到实验者的邮箱中。基于事先对用户的基本生活流程和状态的了解,研究人员可以在访谈中更深入地了解用户。
4.4 轨道隧道钻孔爬壁机器人交互界面原型设计
On this special day, I’d like to talk to youa special way.
这些模块都以上节研究得到的交互行为作为交互动作,并按照相应的操作频率和防误触需求设立各按钮的位置。由于隧道内光环境较暗,因此背景色和交互ICON 的颜色都以暗色调为主。
5 结语
文章在行为构建和交互界面的理论基础上,综合利用用户体验设计的理论方法,结合FBM 行为模型等理论模型,对城市隧道爬壁钻孔机器人用户群体的行为特征进行了挖掘和设计,同时基于行为构建进行了城市轨道隧道爬壁钻孔机器人交互界面设计,从结果来看具有一定的理论和现实意义。然而研究还存在着一些不足之处,如行为逻辑理论还需要进一步梳理,行为构建理论和用户体验理论的结合深度还存在不足等等,这些将会在后续的研究中继续深入。
[1]刘桓龙,李茂,于兰英,等.地铁隧道多方位高精度钻孔设备的方案设计[J].城市轨道交通研究,2017,20(4):39-42+47.
[2]程磊,程志楷,连少朋,等.时空效应下不同孔径超前钻孔有效排放半径研究[J].中国安全生产科学技术,2021,17(9):72-76.
[3]Stephanidis C.Design for All in Digital Technologies[J].Handbook of Human Factors and Ergonomics,2021:1187-1215.
[4]辛向阳.交互设计:从物理逻辑到行为逻辑[J].装饰,2015(1):58-62.
[5]Kurtmollaiev S,Fjuk A,Pedersen P E,et al.Organizational transformation through service design:The institutional logics perspective[J].Journal of Service Research,2018,21(1):59-74.
[6]Fogg B.A behavior model for persuasive design[C]// Persuasive Technology,Fourth International Conference,PERSUASIVE 2009,Claremont,California,USA,April 26-29,2009.Proceedings.2009:1-7.
[7]Oh C,Song J,Choi J,et al.I lead,you help but only with enough details:Understanding user experience of co-creation with artificial intelligence[C]//Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems.2018:1-13.
[8]Cai C J,Winter S,Steiner D,et al."Hello AI":Uncovering the Onboarding Needs of Medical Practitioners for Human-AI Collaborative Decision-Making[J].Proceedings of the ACM on Human-computer Interaction,2019,3(CSCW):1-24.
[9]欧静,赵江洪.多维情感—动作与产品形态的交互设计研究[J].包装工程,2015(18):49-53.
[10]Fogg B.A behavior model for persuasive design[C]// Persuasive Technology,Fourth International Conference,PERSUASIVE 2009,Claremont,California,USA,April 26-29,2009.Proceedings.2009:1-7.
[11]Wastling T,Charnley F,Moreno M.Design for circular behaviour:Considering users in a circular economy[J].Sustainability,2018,10(6):1743.
[12]Silpasuwanchai C,Ren X.Designing concurrent full-body gestures for intense gameplay[J].International Journal of Human-Computer Studies,2015,80:1-13.
[13]Vanden Abeele V,Zaman B,De Grooff D.User eXperience Laddering with preschoolers:Unveiling attributes and benefits of cuddly toy interfaces[J].Personal &Ubiquitous Computing,2011,16(4):451-465.
[14]Alalwan A A.Mobile food ordering apps:An empirical study of the factors affecting customer e-satisfaction and continued intention to reuse[J].International Journal of Information Management,2020,50:28-44.
猜你喜欢
大众文艺(2023年22期)2023-12-10
大众文艺(2022年19期)2022-10-19
包装工程(2022年14期)2022-07-28
力学学报(2022年6期)2022-07-10
壹读(2022年12期)2022-03-24
金桥(2021年11期)2021-11-20
中国特种设备安全(2021年12期)2021-04-26
湖北农机化(2020年4期)2020-07-24
生态文明新时代(2018年2期)2018-03-21
广东石油化工学院学报(2016年6期)2016-05-17
