
基于改进Radon变换的微小器件校正方法研究
2022-08-31 03:47何坚强汪志成翁嘉鑫
制造业自动化 2022年7期
何坚强,汪志成,翁嘉鑫
(1.盐城工学院 电气工程学院,盐城 224000;2.江苏大学 电气信息工程学院,镇江 212000)
0 引言
随着自动化生产模式在我国工业生产中的普及,基于机器视觉的产品质量检测系统在工业生产中的地位也变得尤为重要。在一些器件检测流水线中,可能存在器件随机摆放的现象,无法直接检测器件的各项参数,因此有必要对相机采集的原始图片进行校正预处理。
众多的专家学者对图像校正技术进行了研究,目前主要的研究领域包括文档校正、车牌校正、图画校正等。文献[1]提出了一种基于Hough变换的文档校正方法。该方法采用分级变换、限制搜索范围、选取子区域等方法降低了算法运算的复杂度,提高了校正速度。但该方法只适用于倾斜角度较小的图片。文献[2]运用Hough变换与端点信息实现了车牌的水平校正和垂直校正。但该方法存在计算量大的缺点。文献[3]提出了一种改进的Cabor小波变换与Hough变换相结合的图像校正方法。该方法虽然精度高,但是需要标准图像做参照物因此普适性有待提高。
本文在前人研究的基础上结合流水线上器件摆放情况,设计了一种基于Radon变换的图像校正方法。首先对图片进行多次降采样,降低图像的分辨率[4];然后采用最小包围矩法截取器件图像,在截取后的图像中心附近选取两列像素,自上而下逐个扫描,判断相邻像素之间的灰度值检测首个突变点位置,通过比较首个突变点列坐标大小确定图片的倾斜方向进而确定投影范围;接着采用Radon变换检测图像的倾斜角度[5],完成垂直校正;最后采用占空比法检测垂直校正后的图片是否颠倒,完成正反校正[6]。
1 器件校正模型
为实现器件校正,需要建立器件的校正模型。器件校正原理是对器件旋转一定角度,使器件在水平方向保持垂直。首先对器件进行垂直校正,记器件上一点的坐标为,其校正变换后的坐标为(x′,y′),则有:

其中,β为旋转角。
垂直校正完毕后,需要对上下颠倒的器件进行正反矫正,保证器件管脚向下。其变换公式如式(2)所示,点(x′,y′)为点(x′,y′)对应的变换点。

2 倾斜图像校正过程
2.1 流水线器件倾斜情况分析及校正方案设计
2.1.1 倾斜情况分析
器件在传送带运送过程中,摆放位置是随机的,经过分析大致可以分为以下四种情况,如图1所示。按倾斜方向可以分为左偏、右偏,如图1(a)、图1(b)所示,按管脚方向可以分为管脚朝上(颠倒)、管脚朝下(正向),如图1(c)、图1(d)所示。对这四种情况,本文将分两步进行校正:垂直校正和正反校正。

图1 倾斜情况分类图
2.1.2 校正方案设计
本文首先进行图像预处理,方便进行校正,然后采用Radon变换进行垂直校正。一般Radon变换的的投影角度范围是(0,180),结合实际情况来看,左偏时,投影角度范围应限制在(0,90),右偏时投影角度范围应限制在(90,180)。考虑限制投影角度可以提高算法的运行效率,所以将图像二值化后,用逐行扫描法检测突变点的坐标,通过比较突变点的列坐标大小,判断器件倾斜方向,以此将投影角度限制在90°范围内。这种方法操作简单,且减少了一半的投影范围,可以减少计算量。
管脚向下的图片便于图像识别,因此垂直校正后,还需要判断管脚方向,进行正反校正。从图1中可以发现器件近似矩形,且两根管脚间有大片的空白区域,因此可以对二值化后的图片运用占空比法判断正反。
通过以上分析可以得到具体的流水线器件校正流程图,如图2所示。
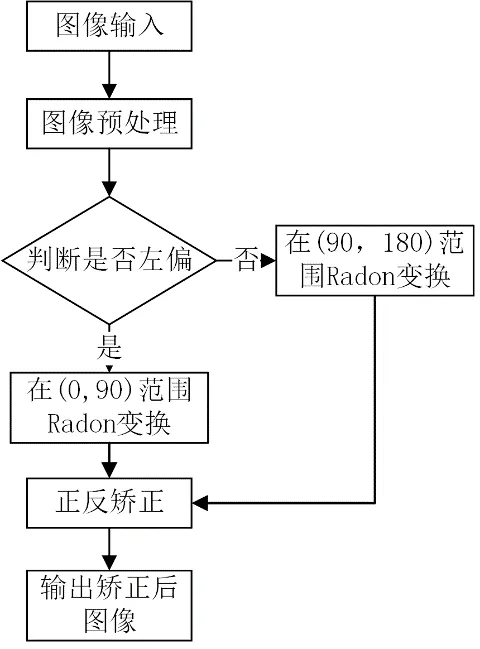
图2 倾斜校正流程图
2.2 图像预处理
图像预处理的目的是分别提取原始图像中所有的器件,且对图像进行降采样,方便后续的校正工作。
器件定位。工业相机采集的原始图片包含多个器件且存在干扰区域,影响校正效果[7]。因此本文采用最小包围矩法,分割干扰区域,对单个器件进行提取。
图片降采样。现代工业图像采集设备的精度越来越高,以本文实验所使用的型号为MER-500-14GM的大恒工业相机为例,采集的每张图片大小约4.8MB,而在倾斜校正阶段,图片不需要包含太多信息且图片过大会极大的增加算法运行时间,所以本文采用降采样的方法降低图片的分辨率。具体操作步骤如下:
对原始图像进行高斯平滑处理,减少图片噪声;
在水平方向、竖直方向上,步长为2,进行降采样。对二维图像而言,这意味着长、宽都缩短为原始尺寸的一半,即图像像素减少四分之三。
实验发现,对原始图片进行4次降采样后,算法仍能完成校正工作,因此对所有的原始图片进行4次降采样。
2.3 确定图片倾斜方向
本文采用的是逐列扫描法判断图片的倾斜方向。示意图如图3所示。图中实线代表器件,图片二值化后,沿图中虚线所示方向逐列扫描,检测首个突变点位置。A,B两点是扫描发现的首个突变点,当时,器件左偏;反之,器件右偏。确定器件倾斜方向后,便可限制Radon变换的投影范围。器件左偏时,投影角度为[0,90];器件右偏时,投影角度为[90,180]。
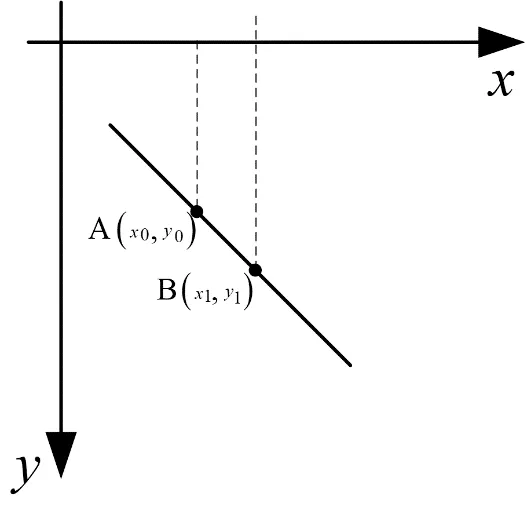
图3 逐列扫描示意图
2.4 垂直校正
如图4所示Radon变换将直角坐标系的直线投影为Radon空间上的一点,通过累加求和,极值即对应了直角坐标系中最明显的直线。投影角度结合三角形角度之和,通过一系列数学运算求得校正角度。
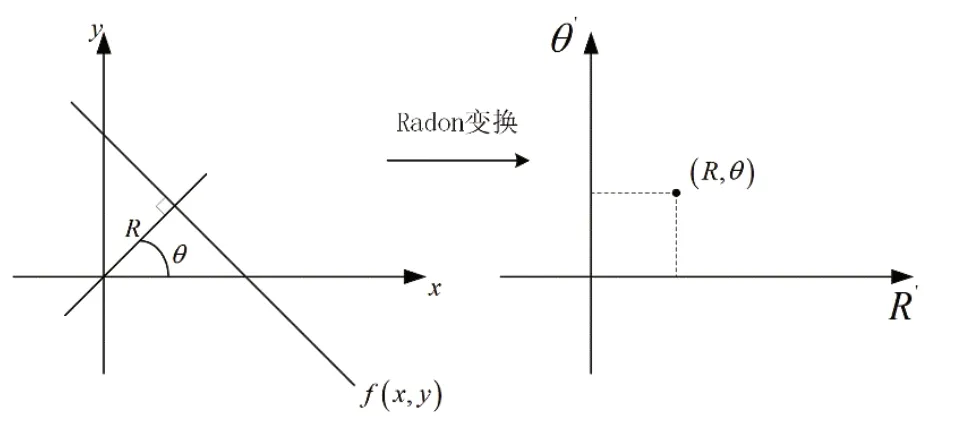
图4 Radon变换原理图
其中Radon变换数学表达式如(3)所示:

本文采用Radon变换确定倾斜角度,具体操作步骤如下:
1)运用Canny算子对图片进行边缘检测,同时进行形态学操作在目标外部加厚目标像素,增加连通域面积,使直线更加明显。图5(a)为处理后的边缘检测图。
2)根据本文3.3节确定器件的倾斜方向,以图5(a)为例,可将投影角度限制在[0,90],对边缘检测图进行投影,得到投影结果可视化图5(b)。图中颜色值越大,表示系数越大,该点对应的直线越明显。从图5(b)中可以发现,颜色值最大的点对应的横坐标为27,因此可以发现从27°方向投影可以得到器件中最明显的直线。
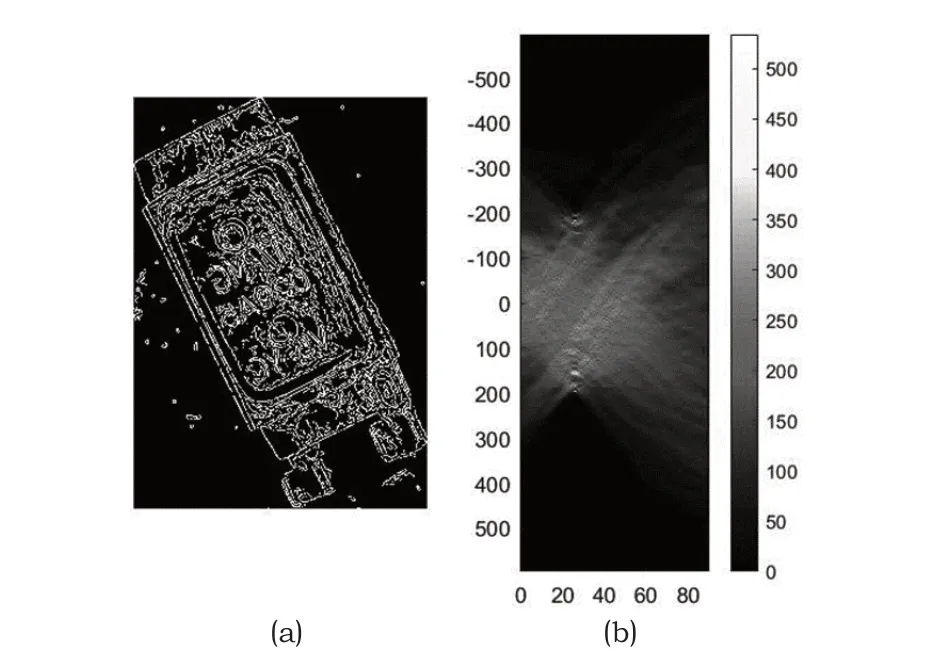
图5 投影可视化图
3)如图6所示,水平方向,由左而右是0°投影线;垂直方向,由下而上是90°投影线。从图中可以发现,27°投影线与器件的长边垂直,这表示投影线也就是长边的法线,由此可以确定校正角度为27°。对器件顺时针旋转27°,完成垂直校正。
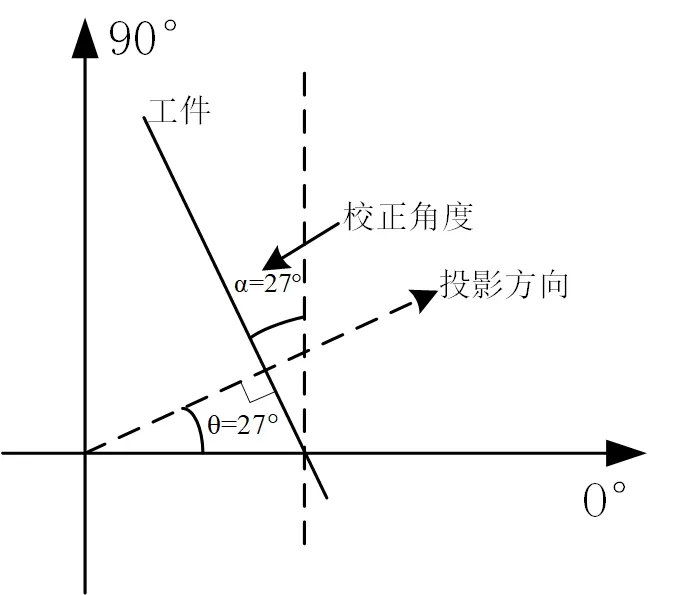
图6 校正角度图
2.5 正反校正
图7(a)是经过垂直校正的器件,从图中发现器件管脚向上,表面字符颠倒,此时器件的状态不便于后续的编码识别,因此对器件进行正反校正。图7(b)是图7(a)的二值化图像,将图7(b)以虚线为界分为三个区域,区域1包含区域3。从图中可以看出区域3包含了两个管脚,中间有大片的黑色像素,因此区域1的白色像素数量比区域2少,所以本文采用占空比法即通过计算比较上下两部分白色像素分别占各区域像素总数的比值,对颠倒器件进行校正。
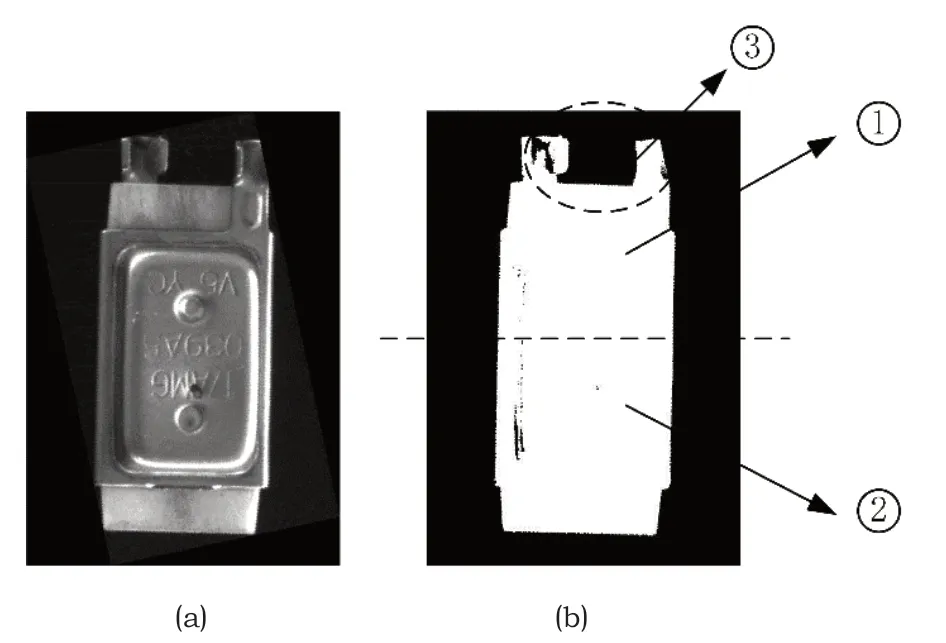
图7 占空比原理图
假设图7(b)的尺寸是,其占空比计算公式如式(4)所示。
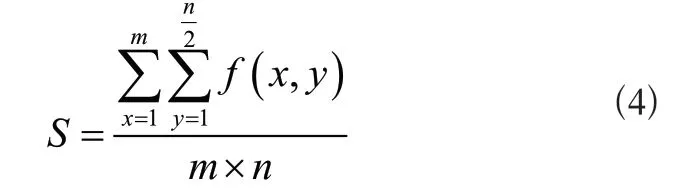
其中,是像素点集合,S是占空比比值。
3 实验结果分析
本文实验基Matlab R2016b平台,图像采集设备是大恒工业相机,型号为MER-500-14GM。
3.1 运行时间比较
以图5为例,比较Hough变换[8]、Radon变换[9]、本文算法对单个器件的校正速度。表1记录了三种算法的三次运行时间。
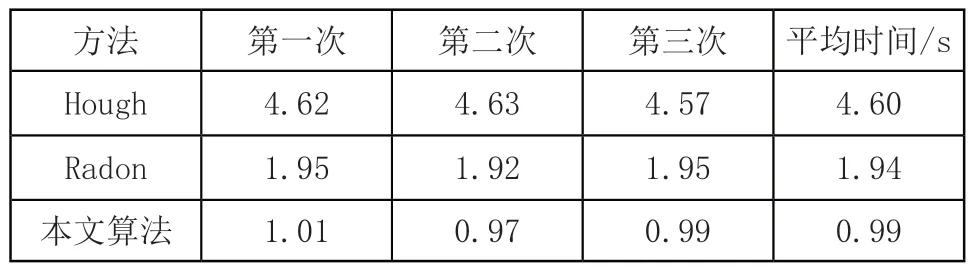
表1 三种算法运行时间比较
由表1可以看出本文算法与Hough变换、Radon变换比较,平均运行时间分别提高了3.61秒、0.95秒。分析原因是,Hough变换空间复杂度和时间复杂度较高,因此计算量较大;本文算法在Radon变换的基础上,采用降采样和限制投影角度的方法加快了运行速度。
3.2 正反校正结果比较
分别采用逐行扫描法和占空比法对一百张垂直校正后的图片进行正反校正,比较两种方法的准确率。逐行扫描法原理是由上至下横向扫描突变点的个数,判断管脚位置,从而确定器件是否颠倒;占空比法原理是计算图片上下两部分白色像素的占比,确定器件是否颠倒。表2为两种方法成功率比较。

表2 两种方法成功率比较
从表2可以发现,占空比法比逐行扫描法成功率高7个百分点。分析原因,如图8所示,器件表面凹凸不平,采集的图像亮度分布不均匀,在使用最大类间方差法二值化图像时,会在内部形成阴影,从而造成了突变点数量发生较大变化,影响实验结果。而使用占空比法时,两根管脚之间有大片的黑色像素,因此抗干扰性更强。
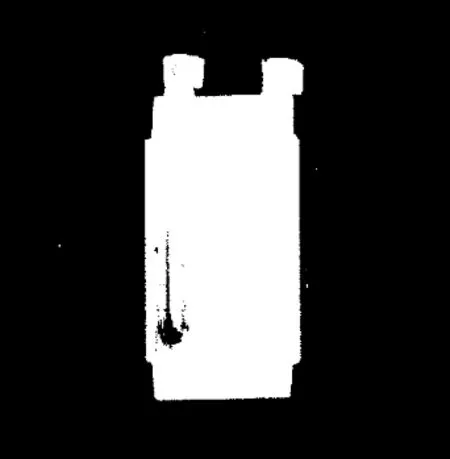
图8
4 结语
本文针对流水线器件摆放不规则的问题,设计了一套校正方法。将逐列扫描法、降采样与Radon变换结合,限制投影角度、降低计算复杂度,有效缩短了算法运行时间;引入占空比法,解决了Radon变换无法判断器件正反的问题。实验结果表明本文方法校正效率高、普适性强,适用于流水线随机摆放器件的校正。
猜你喜欢
电子制作(2021年21期)2021-11-10
科技创新与应用(2021年10期)2021-03-15
国学(2020年1期)2020-06-29
计算机与数字工程(2019年4期)2019-05-07
家庭影院技术(2018年11期)2019-01-21
摄影之友(影像视觉)(2017年10期)2017-11-07
现代职业教育·中职中专(2017年2期)2017-08-13
摄影之友(影像视觉)(2017年1期)2017-07-18
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
中国舰船研究(2015年2期)2015-02-10
