
多功能农业移动平台机器人设计与应用
2022-09-11 04:59陈光明吴子鉴
农机使用与维修 2022年9期
0 引言
我国是一个农业大国,许多农活都是通过修剪、嫁接等方式完成的,喷洒、采收等工作也多是人工完成,既费时又费力,成本又高。随着信息技术与人工智能技术的不断发展,新型农业技术,如设施农业,已经大量应用了农业机器人技术。农业智能机器人是21世纪农机发展的一个重要趋势
。农业机器人是农业生产中的一种新型生产方式,在提高农业生产力、改变农业生产模式、解决劳动力短缺等方面具有重要作用。农业机器人将会在农业领域掀起一场科技革命,有效促进农业发展。农业机器人作为一种新的农业机械,在农业生产中应用将会推动农业机械化发展,使农业的信息化、智能化水平得到全面提高,是农业持续健康发展的必然选择
。
1 概念及研究现状
农业机器人是传感器技术、信息技术、通信技术、精密制造技术等各种先进科学技术的综合体,由于其工作特性,移动平台成为了农业机械人在整个运动过程中的基础。根据作业环境,农业机器人分为户外作业机器人和温室作业机器人。目前,农业机器人的移动平台主要有轮式、履带式、轮履式等
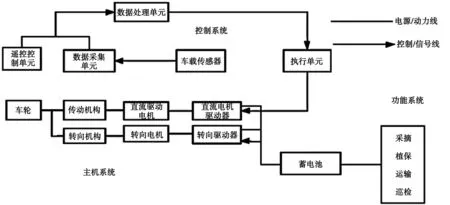
。农业移动平台机器人由主机系统、控制系统及功能系统3部分组成,如图1所示。
目前,国内外已经研究设计并制造了一些实用的农业机器人。Q.C.Feng等
设计了一种基于声纳摄像传感器的自动拣选机器人(图2),移动平台沿着植物槽进行智能导航,根据果实的饱和度、色调阈值和形状特征检测出成熟果实,通过双眼视觉单元定位采摘点。卡塔尼亚大学设计出一种柑橘采摘机器人(图3),采摘臂由双眼视觉反馈控制,每个手臂都配备有一个摄像头和一个辅助灯来实现识别和定位水果的功能。杨世胜等
研制了一种由控制装置、四轮驱动装置、传感器调整装置、雾化器等构成的喷雾机器人装置(图4)。Utstumo T等
开发了一种基于机器视觉的 Adigo除草机器人(图5),该机器人主要用于对行种胡萝卜进行精确除草,并根据需要进行滴灌。农业机器人种类繁多,按照所述行走系列和所述机械手系列组织分类,如表1所示
。





2 设计与关键技术
2.1 设计
多功能农业移动平台机器人以可重构理论作为其设计理念。该方案采用模块化结构,把一个复杂的系统分解为若干个简单模块,既方便了系统的设计与分析,又使其具备了即插即用、易用的特点
。多功能农用作业移动平台机器人的设计分为两大部分,即机械及控制模块。由主机模块设计和子功能模块设计组成,主机模块包括驱动车车架、行走机构、转向机构、减震机构等,子功能通过机械臂及机械臂的移动机构等设计实现。控制模块包括驱动模块、机械臂水平和垂直移动模块、单片机模块及各种功能机械臂具体需要实现的功能相关的模块等。
相信我,我真的不是充气娃娃。艾莉说,我来,最初只因一句玩笑,后来因为好奇,因为恶作剧,或许还因为,我曾经爱上秦川。现在我后悔了,我想离开。我离开,不仅因为你让我没有尊严,还因为,我不想继续破坏你和秦川的感情。假如我继续留在这里,最终变成充气娃娃的会是你。我指的是,你早晚会变成一件可有可无的工具,早晚会被秦川当成一个不能再用的抽水马桶扔掉。你同意我的话吗?
2.2.1 复杂三维空间机器人连续运动控制技术
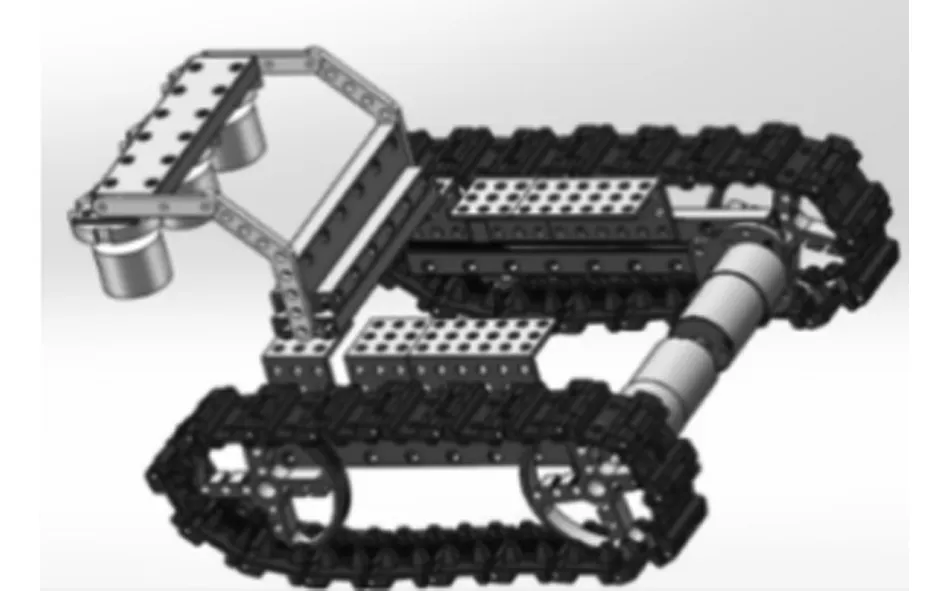
选取合适的发动机保证足够的功率使移动平台移动。电动机体积小、可正反转,易于布置其他装置、实现移动平台的前进、后退功能。履带式行走机构通过性能好,爬坡能力强,转弯半径小,灵活性好,稳定性高,适用于田间复杂路面情况。主要设计其车架、履带和轮系,并对车架进行有限元分析,保证设计的合理性。电源系统主要由电源向动力装置、子功能模块和控制模块供电,保证各系统正常运行。该设计采用的电机为12 V直流电动机,其中主机实物模型如图6所示,履带底盘三维模型如图7所示。
SF的收派业务在收件环节,客户满意度最高的是收件服务中收派员的服务态度,主动积极。而在收件服务中发现收派员业务熟练度、专业度这方面满意度较低,说明SF员工在专业知识方面还是比较欠缺。在收件环节,满意度最低的是价格价值中的价格是否透明,这说明收派员在上门收件的过程中,并没有明确地告诉顾客各项服务的价格标准,只是随性给顾客办理服务手续。


羟考酮静脉自控镇痛对腹腔镜下宫颈癌根治术后患者相关指标的影响 …………………………………… 卢建华等(12):1689
作物转入外源基因使作物生长势、越冬性和抗性得到明显提升,转基因作物发生基因漂流,对逆境有极强适应性,其后代发挥外源基因的优势与原有种成竞争关系[17]。此外,若近缘种是杂草,基因漂流的结果可能产生携带抗性基因的杂草,由于失去天敌克制,沦为恶性杂草,从而占据生存空间。1998年加拿大发现部分油菜可以抗1~3种除草剂,只能用毒性更大的除草剂才能杀灭[18]。转基因作物向非转基因作物进行基因漂流时,携带外源基因的后代可能产生抗性积累,致使除草剂使用增加、土壤污染、生物多样性遭到破坏[19]。由此可见,转基因作物大规模种植可能会给植物群落造成极大的负面影响,导致生物入侵。
子功能模块结构设计和功能互换——机械臂及移动机构设计部分应满足多功能农业作业的需要,其实现主要依赖于机械臂的设计及与驱动车前置机械臂移动机构的合理连接。其中主机模块为各功能共用,与其实现采摘、植保、运输等功能的机械臂机构安装不存在干涉问题。选取功能模块并通过SoildWorks进行建模,给出其功能模块示意图。其功能模块设计分为:采摘、植保、运输、巡检4类。
1)采摘。主要采摘苹果、桃子等水果,以通用性强、承载力强、易操作、机构简单为设计要求,使用柔软的材料接触被采摘物,以防止被抓伤。而夹紧力的最佳值是保证靶板不会被夹断的最大值。在同样的驱动力下,机器人的大小决定了夹紧力,而控制物体能否完美摘取的关键是机器人的铰链大小
。国内苹果的果实直径一般为80~120 mm,机械手在摘下苹果时,最小的指径应该超过120 mm
。根据整体作业空间要求,该方案使用两根单关节手指,手指内侧弯曲,模拟人手抓住一个苹果,指尖和指跟的长度超过140 mm,确保在拿到苹果时,手指可以容纳整个苹果;苹果采摘械手的最大高度为3.0 m,根据人工操作时的平均高度1.6 m,该设计的采摘机械臂的长度超过1.4 m
,如图8所示。

采摘型机械手臂为二自由度机械手臂,如图9所示,包括伺服电机、机械臂、皮带轮、机械爪、连接杆、滑块、控制转动杆、连接丝杠、连接块、步进电机、底座。伺服电机经皮带向机械臂传递动力,控制其上下移动;机械手爪部分底座刚性连接在机械臂上,机械爪与连接杆固连在一起,步进电机控制连接丝杠旋转,通过滑块与连接丝杠的配合控制机械爪的开合;通过控制机械臂关节处的伺服电机实现机械手臂的采摘行为。

3)运输。运输功能在移动平台上很容易实现。工作时设置有运输支架用于固定运输货物。由电机驱动移动平台运动,驱动器采用 PWM模式来控制驱动力和转向力,如图11所示。
对于桃子、蘑菇和鸡蛋等易碎物品,机械手的抓握要适度控制。需要一种能够适应不同形状物体的柔软装置,使其在运输和搬运过程中不会受到损坏且保持目标物的完好。
2)植保。植保是农业生产的一个重要环节,其对防治农作物病害、确保粮食稳产高产起着十分重要的作用。该农业移动平台机器人通过更换药箱及喷雾机器进行植保作业。32单片机通过分析指令控制实际动力系统和喷洒系统。驱动力和转向力由驾驶员通过调整PWM模式进行控制。微控制器I/O接口为移动平台提供移动控制信号,并能及时有效地切换移动平台的前向和后向功能,如图10所示。
这回大梁冇像往日那样发躁。他握住我的手,听我讲完,一直喑着不说话。我说:“我认下了狼剩儿,就算在东洋人的窝里,那儿子总会护着娘的。”

4)巡检。通过配备双目摄像头实时反映周边环境实现巡检功能。
2.1.3 控制模块
因为作业对象是一些不连续的个体,如水果、树苗等,这些个体的形态和生长位置都是随机的,而且农业机器人常常在室外工作,对不确定的环境如光照、风向等非常敏感。因此,农业机器人的机械臂必须对目标进行灵敏、精确的辨识,并能适时探测出被摄物的位置,进而实现机械手的位置闭环控制。机器人的柔性移动加工技术是机器人手臂研究的一个主要课题,机器人手臂的自由度必须足够大,能够从任何角度抓住目标。
2.1.2 子功能模块
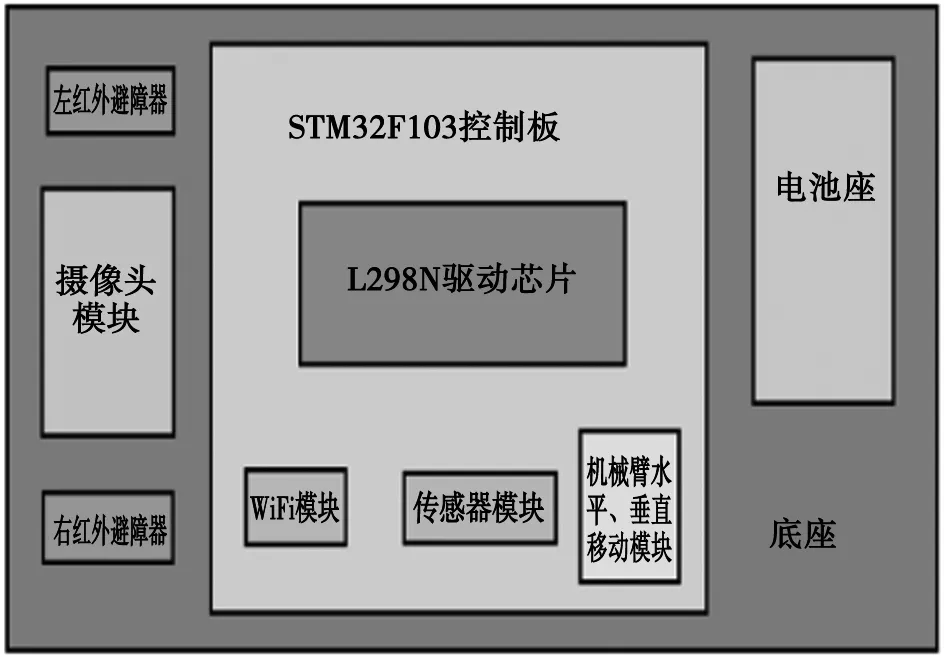
本系统的软件主要分为两大类:驱动类和应用类。驱动部分包括电机驱动、红外传感器驱动、摄像头视觉采集、无线路由器固件等。移动平台的控制模块及系统硬件总体设计如图12、图13所示。主要对其主程序、电机驱动程序、视频采集程序等进行设计。

2.2 关键技术
农业机器人是一种具有复杂机电一体化特征的典型产品。相对于工业机器人简单、可靠、已知的工作环境和工作目标,农业机器人所面对的环境和工作对象具有非结构化、不确定性和不可预测性
。其主要技术有以下几项。
2.1.1 主机模块
在果园和田间自主运行的机器人,具备比工业机器人更复杂的动作和精准的定位技术,如地面不平、突如其来的障碍物、大范围定位精度、机器人稳定性、复杂的自然环境等。
2.2.2 准确识别随机目标位置,准确定位机械手
硬件设计作为主控开发,扩充一些视觉采集模块、红外避障模块等。在结构设计中尽量减少外部设备,以达到最大的整合。该电机驱动芯片采用L298N,并采用了标准的逻辑电平控制信号,配有两个启动控制信号。该系统能够探测到外界的电阻,并将其变化反馈到控制电路中。在变速时,利用脉冲编码调速技术,通过改变直流电机占空比电压,改变电机的平均电压,控制电动机的速度发生变化。
2.2.3 机械手夹持力及形状控制技术
以3 459 nm波长的中红外激光作为探针光辐照薄膜,得到了在不同探针光功率下,40 nm薄膜对探针光的透过率、反射率随泵浦光辐照薄膜时间的变化情况,如图6.
从我国乡村闲置宅旅游开发历程和模式可看出,村干部是闲置宅旅游开发的关键。目前,参与闲置农宅旅游开发的相关方有:村民、以村委会带领的村合作社、旅游开发企业、市(区)农委、市(区)财政局、市(区)旅游局、街道政府,在这些相关方中,村干部是至关重要的一环,我们必须要加强村干部的培训和学习。这是因为:
2.2.4 复杂对象的分类技术与学习能力
农产品的特征是复杂的,其数学模型难以建立。基于模糊逻辑、神经网络、智能模拟等智能技术,实现自主学习是十分必要的。农业机器人能够在人类的帮助下,持续地学习和记录学习成果,从而奠定处理复杂状况的知识基础。
2.2.5 适应恶劣环境条件的技术
农业机器人的工作环境比工业机器人更复杂、更严酷。其传感、驱动和信息处理组件和系统必须适应环境光、阳光、阴影、灰尘、热量、湿度和振动的影响,以保持高可靠性。
3 总结与展望
综上所述,探讨了国内外农业移动平台机器人的研究现状、应用现状及其主要技术。提出设计一种多功能农用作业移动平台,根据可重构原则依靠更换机械手臂来达成功能的切换,实现快速更换各种辅具,可实现采摘、植保和运输功能,利用三维参数化建模软件SolidWorks构建虚拟样机模型。
鄂麦398属于多穗及大穗兼备型品种,矮秆,抗倒性强,对氮肥需求量较高,在中等地力水平下,全生育期每公顷需施纯氮(N)180~210 kg、磷(P2O5)120 kg和钾(K2O)120 kg。施氮量按重施基肥(70%)、追施苗肥(20%),看苗追施拔节平衡肥(10%)的模式操作,促进壮苗早发,培育大穗,优化品质[7,8]。
将机器人引入到农业生产过程中,可以减少劳力和提高农业生产率。目前,虽然对农业移动平台机器人的研究取得了很大进展,但对机器人上安装的组件传感器的研究很少,对通用的、应用于农业领域的特殊传感器的研究更少。其次,单个机器人的生产成本也需控制,只有控制了成本,才有市场,才能实现规模化应用。最后,智能控制与研究并行,农业机器人的设计趋势是日常使用方便、操作简单、工作稳定,应能通过工作中的操作减少人力资源的损失。
随着智能、导航、传感器等先进技术的不断发展,农业移动平台机器人未来的发展方向如下: 1)可扩展性、通用性、灵活性、机动性,通过机器人的性能最佳化,可减少生产费用;2)可以根据不同的作物种类替换不同的终端执行机构,并可多次使用,提高使用效率;3)通过不断优化其结构和配置,使其变得更小、更轻;4)深入研究视觉传感器技术、图像采集和处理算法,提高认知能力和避障能力,从而提高识别和避障准确性;5)新材料如纳米材料、柔性材料等在农业机器人中的应用,可以推动农作物无损作业技术的迅速发展。
[1] 张鹏,张丽娜,刘铎,等.农业机器人技术研究现状[J].农业工程,2019,9(10):1-12.
[2] 闫树兵,姬长英.农业机器人移动平台的研究现状与发展趋势[J].拖拉机与农用运输车,2007(5):13-15.
[3] 张英旭.农业机器人移动平台数据采集系统及伺服控制系统的研制[D].天津:河北工业大学,2016.
[4] Feng Q C, Wang X, Zheng W G, et al.A new strawberry harvesting robot for elevated-trough culture [J].International Journal of Agricultural and Biological Engineering, 2012, 5 (2) :1-8.
[5] 杨世胜,张宾,于曙风,等.电磁诱导农用喷雾机器人路径导航系统的设计与实现[J].机器人, 2007,29 (1) :78-81.
[6] Utstumo T,Urdal F,Brevik A,et al.Robotic in-row weed control in vegetables [J].Computers and Electronics in Agriculture,2018,154:36-45.
[7] 倪银堂,陈贵江,张超.农业机器人移动平台的研究现状与趋势[J].南方农机,2018,49(18):5.
[8] 胡桂仙,于勇,王俊.农业机器人的开发与应用[J].中国农机化,2002(5):45-47.
[9] 樊正强,张青,邱权,等.农业机器人移动平台行进方式综述[J].江苏农业科学,2018,46(22):35-39.
[10] 王田苗,邹丹,陈殿生.可重构履带机器人的机构设计与控制方法实现[J].北京航空航天大学学报,2005(7):705-708.
[11] 雷歌,殷凤来.智能机械手应用现状及关键技术研究[J].无线互联科技,2019,16(4):133-134.
[12] 杨栋皓,蒋爱德.苹果采摘机械手的设计与实现[J].农业开发与装备,2020(11):117-118.
[13] 杨文亮.苹果采摘机器人机械手结构设计与分析[D].镇江:江苏大学,2009.
[14] 张立彬,计时鸣,胥芳,等.农业机器人的主要应用领域和关键技术[J].浙江工业大学学报,2002,30(1):38-43.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
当代工人(2020年8期)2020-05-25
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
汽车与新动力(2012年1期)2012-03-25
