汽车主动悬架系统的有限频域输出反馈控制
2022-09-15 06:22孟亚鹏李文锋谢正超
机床与液压 2022年12期
孟亚鹏,李文锋,谢正超
(1.泛亚汽车技术中心有限公司,上海 201201;2.华南理工大学机械与汽车工程学院,广东广州 510640)
0 前言
作为汽车底盘中不可或缺的一部分,汽车悬架系统在提高乘坐舒适性、改善操纵稳定性和优化道路友好性方面起着非常重要的作用。悬架系统通常包含被动悬架系统、半主动悬架系统和主动悬架系统3种类型。由于主动悬架系统配备了一个独立作动器,能够有效改善悬架系统各性能间的矛盾关系,进而提升悬架系统的综合性能,所以主动悬架系统已经成为当前的研究热点之一。近年来,大量的控制方法被开发应用到主动悬架系统上来,例如自适应控制、滑模控制、预瞄控制、最优控制和H控制等。值得注意的是,H控制方法在主动悬架控制分析与设计中引起了较为广泛的讨论,尤其是在注重控制鲁棒性和干扰抑制性能的背景下,更加引人关注。
在汽车悬架系统控制的分析与设计中,核心目标是抑制路面干扰产生的振动,以提高汽车的乘坐舒适性。在现有的控制方法中,大多数都是针对全频域的路面干扰进行分析。然而现实中路面激励的频率往往属于一个特定频率区间。此外,根据ISO-2631,人体对4~8 Hz的垂直振动更为敏感,甚至由于和人体器官的振动频率相近,二者产生共振,对人体造成伤害。因此,针对有限频域约束的主动悬架系统进行控制分析与设计显得更有意义。为了解决有限频域下的控制问题,文献[11]提出了一种广义KYP引理,搭建了频域不等式与时域线性矩阵不等式等价转换的桥梁。基于广义KYP引理,大量的研究成果被发表并获得了较好的工程应用。其中,SUN等针对主动悬架系统提出了一种有限频域控制方法,仿真结果验证了所提的有限频域控制方法在特定频率段内能够进一步改善悬架的乘坐舒适性。值得指出的是,有限频域控制能够最大程度地抑制所关注频域内的扰动,而适当放宽对其他频域内的扰动抑制效果。然而,上述有限频域控制方法必须在所有悬架状态信息均能在线获得的情况下才能作用于悬架系统。在实际悬架系统中必然存在部分状态变量无法通过商用传感器获得的情况,因此上述方法具有严峻的可行性问题。基于此考虑,输出反馈控制的研究渐渐引起了学者们的注意。文献[16]提出了一种基于单步法的有限频域静态输出反馈控制,但是该方法需要一个正定矩阵来完成变量替换,在存在时滞、不确定性等情况下该条件不能得到满足。
因此,本文作者针对汽车主动悬架系统提出了一种基于启发式两步法的有限频域静态输出反馈控制方法。首先,提出一种特定频域下的H性能指标判据,针对性考虑了敏感频域内扰动的抑制性能,有助于进一步提升车辆的乘坐舒适性;其次,提出一种有限频域静态输出反馈控制的设计与优化算法,消除了对完整状态信息的在线依赖,保证了控制器的工程可行性;最后,通过数值仿真和台架试验证实了该方法能很好地抑制外界扰动,从而有效地提高悬架系统的乘坐舒适性。
1 问题描述
文中考虑一种典型的二自由度1/4车主动悬架模型,如图1所示。
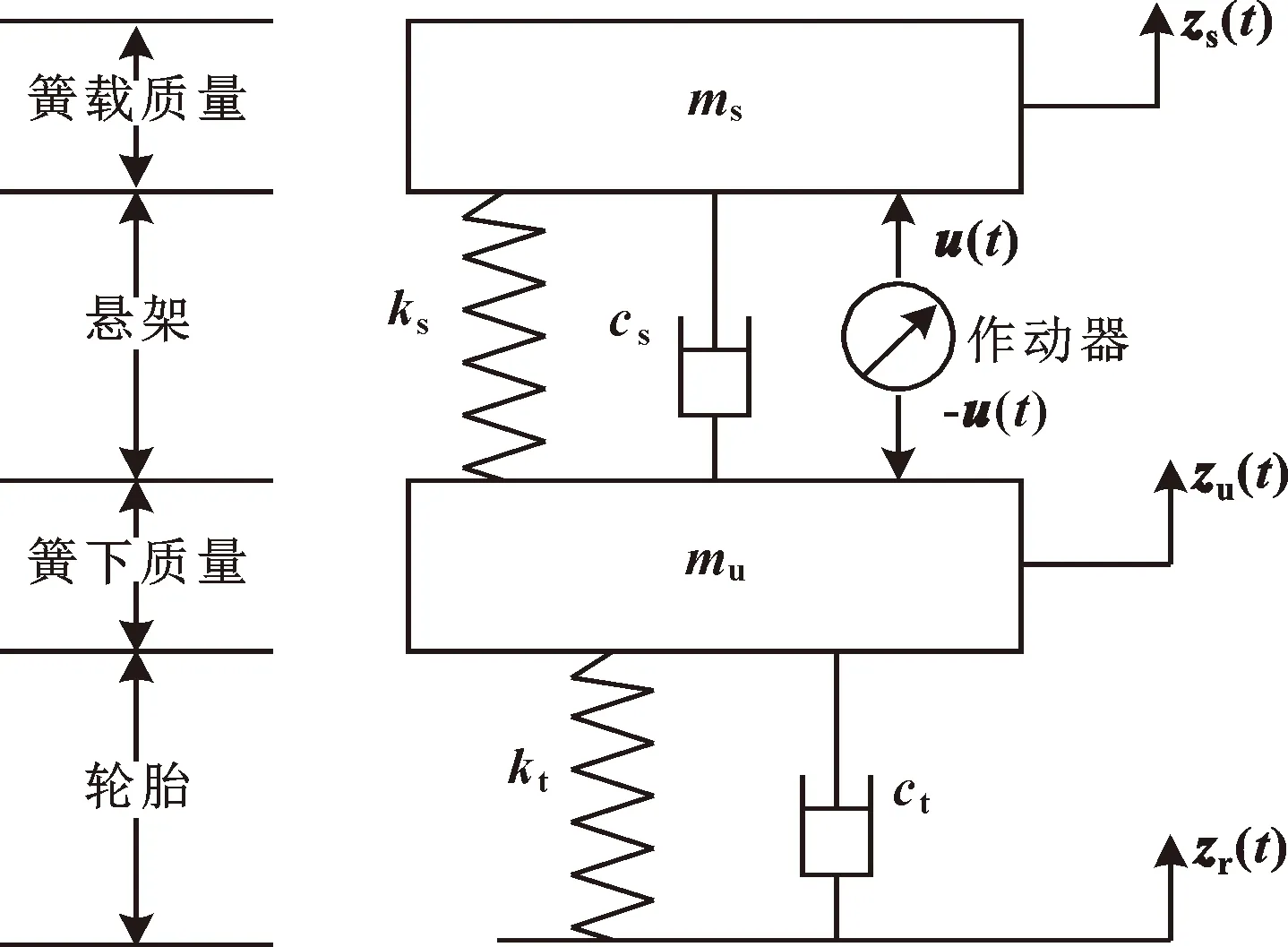
图1 1/4车主动悬架模型
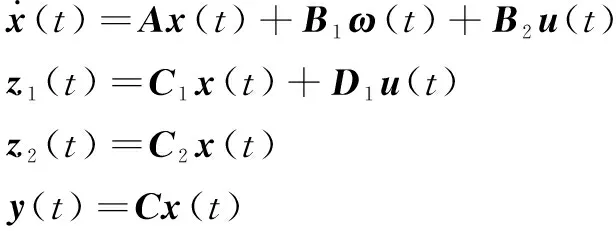
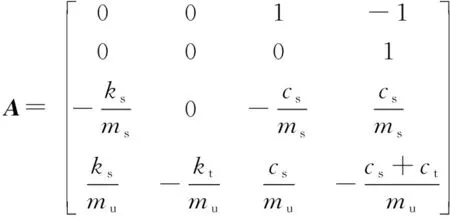
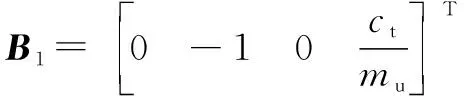
其动力学方程如下:
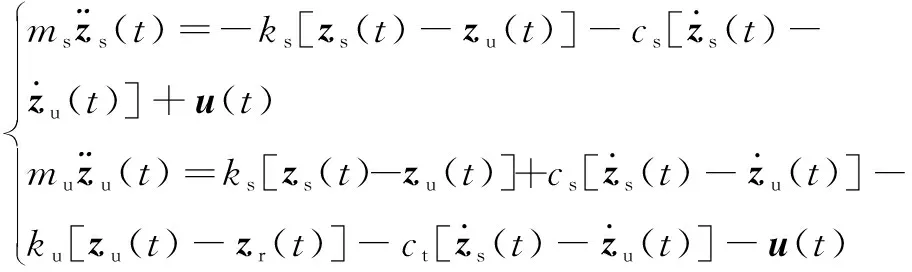
(1)
其中:和分别代表簧上质量和簧下质量;()、()和()分别代表车身位移、轮胎位移及路面干扰不平度;和分别表示悬架刚度和阻尼系数;和分别代表轮胎刚度和阻尼系数;()表示作动器的主动力。选取状态向量如下:

(2)
由于()-()含有路面不平度信息,无法通过低成本传感器获得,故文中的测量输出向量选取如下:
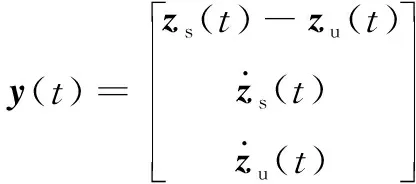
(3)

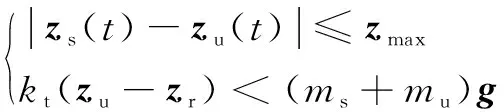
(4)
其中:表示悬架行程的最大值。

(5)
其中:



文中考虑的静态输出反馈控制器形式如下:
()=()=()
(6)
综上所述,可以得到主动悬架闭环系统表达式如下所示:
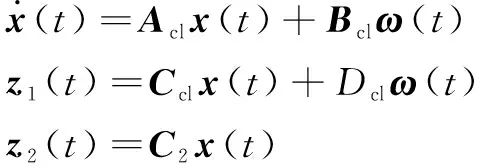
(7)
其中:=+,=,=+,=0。
文中的目标是提出一种形式如式(6)的控制器设计方法,使得下列条件成立:
(1)闭环系统(7)在干扰为零的情况下渐近稳定;
(2)使得车身加速度在考虑频率范围内满足H性能,即

(8)
其中:(j)表示到的传递函数。
(3)主动悬架机械约束得到满足,即
|[()]|≤1=1,2
(9)
2 控制设计
将提出一种基于启发式两步法的有限频域静态输出反馈控制方法,以进一步提升主动悬架系统的综合性能。首先,给出如下两个引理。
引理1:针对任意线性状态空间表达系统(,,,)和一个对称矩阵,下面的两个条件等价:
(1)频域内的不等式:

(10)
(2)存在对称矩阵和正定矩阵>0,下式成立:

(11)
其中:

首先,容易得知式(10)可以写成如下形式:
<0
(12)
其中:
然后,通过选取Lyapunov正定函数()=()(),闭环系统(7)可以通过下面的不等式来保证渐近稳定性要求:

(13)
其中:

引理2:给定正标量、及控制器形式如式(6),闭环系统(7)满足渐近稳定性并且获得期望性能(8)和(9),若存在对称矩阵、>0,>0和一般矩阵、及一个正标量使得下式成立:
(14)
(15)

(16)
则有限频域状态反馈增益系数的求解算式为
=
(17)
其中:[]表示+。
2.1 系统控制分析
综上所述,给出系统控制分析的定理如下:
定理1:给定正标量、及控制器形式如式(6),闭环系统(7)满足渐近稳定性并且获得期望性能(8)和(9),如果存在对称矩阵、>0,>0和一般矩阵和使得下式成立:
++<0
(18)

(19)
(20)
其中:如式(12)所示,如式(13)所示,且


对于上述定义的矩阵、、和,下列关系成立:


(21)

接下来讨论的是主动悬架系统的机械约束。基于上述讨论,以下不等式成立:

(22)
对式(18)两端同时进行0到的积分,则以下不等式成立:


(23)



(24)
其中:(·)表示的是矩阵的最大特征值。因此,系统的机械约束(9)可以通过下式得到保证:

(25)
其中,基于舒尔补定理,式(25)可以改写为式(20)。
至此,证明完成。
在定理1的基础上,接下来提出一个用于控制器反馈系数求解的新定理,如下:
定理2:给定正标量、及控制器形式如式(6),闭环系统(7)满足渐近稳定性并且获得期望性能(8)和(9),如果存在对称矩阵、>0,>0和一般矩阵、和使得下式成立:
++<0
(26)

(27)
(28)
进一步,静态输出反馈系数的求解算式为
=
(29)
其中,,和的定义与前文一致,且


证明:根据式(19)容易得知+<0,即矩阵是可逆矩阵。接着作如下矩阵替换:
=,=()
(30)
因此,在定理1的基础上,式(26)—式(28)成立。
至此,证明完成。
2.2 系统控制求解
定理2给出了一个求解静态输出反馈系数的充分条件,然而矩阵不等式中存在未知矩阵和的耦合。换言之,定理2的条件不再是线性矩阵不等式的形式了,无法直接求解。在文献[17]的启发下,未知矩阵可以提前设定为一个有限频域状态反馈增益,从而使得定理2中的矩阵不等式可以直接求解。由引理2得到一个有限频域状态反馈增益是可行的,在此基础上,有限频域静态输出反馈控制器可以通过求解下列优化问题获得:
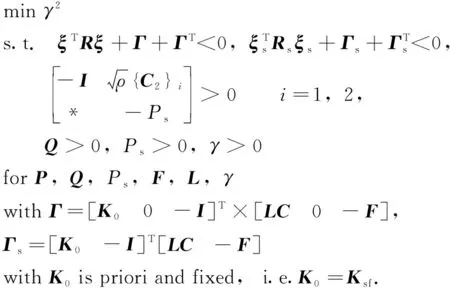
(31)
进一步,文中提出的基于启发式两步法的主动悬架系统有限频域控制器求解步骤总结如下:
步骤 1,通过运行引理2寻求一个合适的有限频域状态反馈增益系数;
步骤 2,求解最优化问题(31)并获得期望的有限频域静态输出反馈增益系数。
3 仿真分析与试验验证
为了评估和验证文中所提控制方法的有效性,采用图2所示的主动悬架设备进行数值仿真和台架试验。主动悬架设备主要部件的介绍如图2所示,悬架参数如表1所示。与控制求解相关的参数选取为=4 Hz,=8 Hz,=500及=0.9。通过MATLAB LMI工具箱的MINCX函数,按照启发式两步法可以求解得到有限频域输出反馈控制的性能指标为=4.290 2,其反馈增益系数为=[591.300 5 -66.097 3 -0.589 4]。
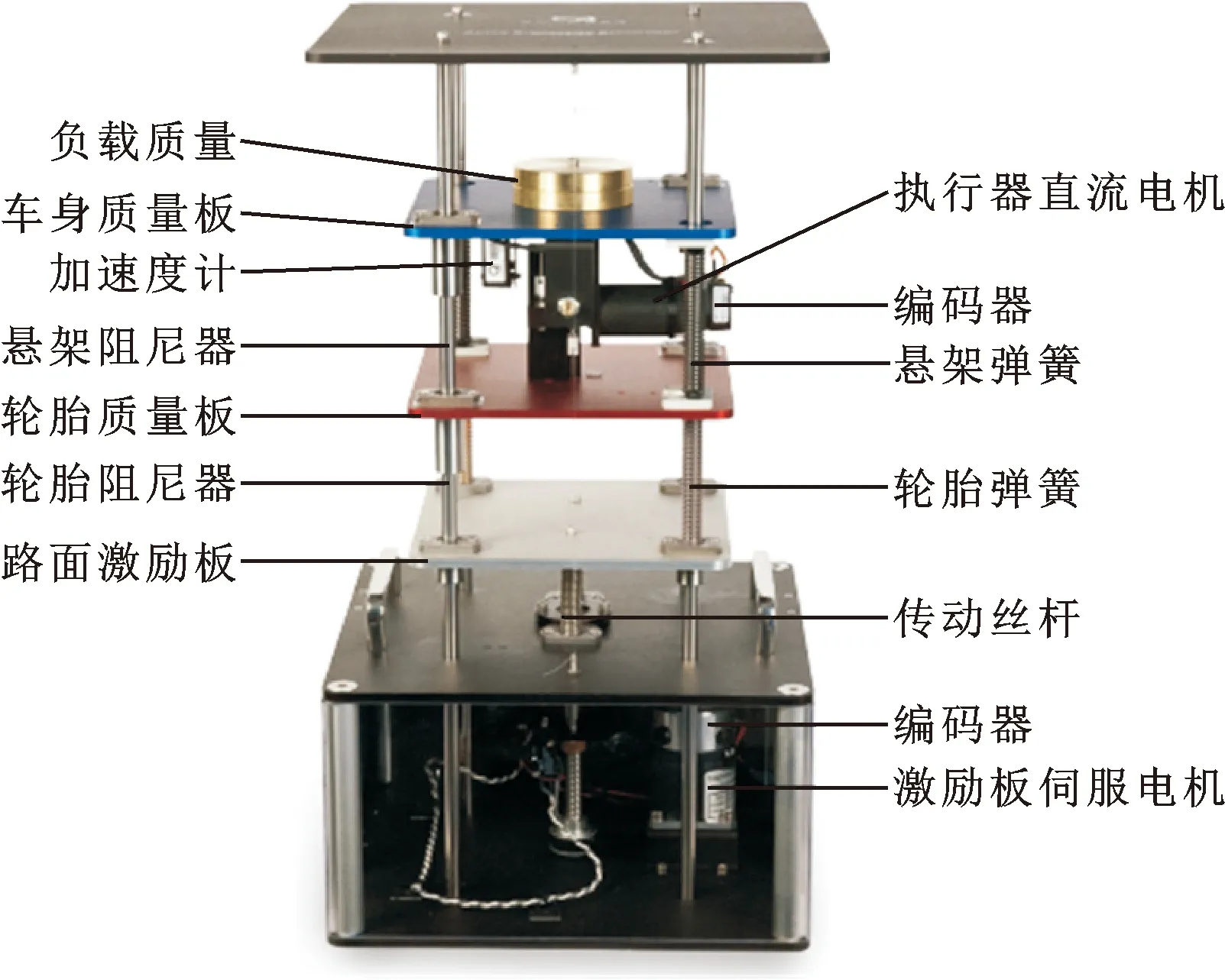
图2 主动悬架设备
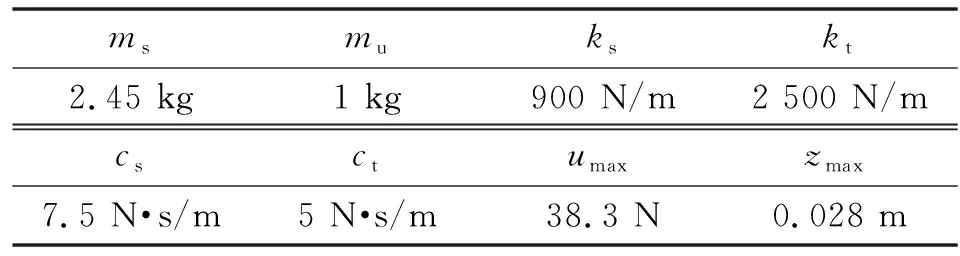
表1 主动悬架试验台参数
同样地,根据所提有限频域输出反馈控制器设计的基本思路,可以获得一个全频域输出反馈的性能指标为=14.356 6,其反馈增益系数为=[460.166 7 -61.694 6 1.217 1]。
基于得到的控制器参数,通过Bode函数可以得到如图3所示的车身加速度频域响应曲线。可以看出:相比较无控制器的被动悬架系统,搭载有限频域输出反馈控制器和全频域输出反馈控制器的主动悬架系统能够产生较低的车身加速度,这说明两种控制器均具有良好的干扰抑制性能;其次可以看出与全频域输出反馈控制器相比,有限频域输出反馈控制器在干扰抑制方面更具优越性,这说明有限频域控制器比全频域控制器能更好地抑制路面扰动,从而获得更好的乘坐舒适。换句话说,车身加速度频域响应验证了所提有限频域输出反馈控制方法的优越性。
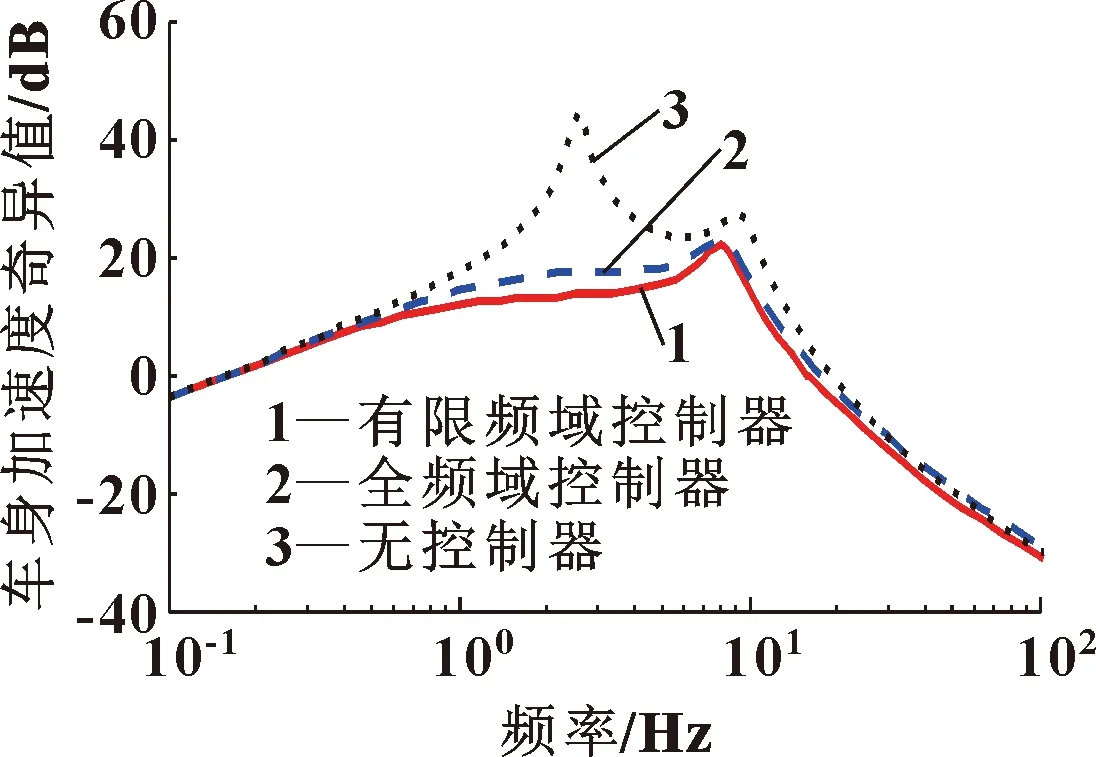
图3 车身加速度频域响应
为了进一步评估主动悬架控制系统在时域内的性能,采用如图4所示的主动悬架试验台进行实验分析与验证。考虑到在控制设计过程中面向的是一般路面激励,选取两种典型路面形式开展实验和仿真研究。首先给出如下脉冲路面激励:
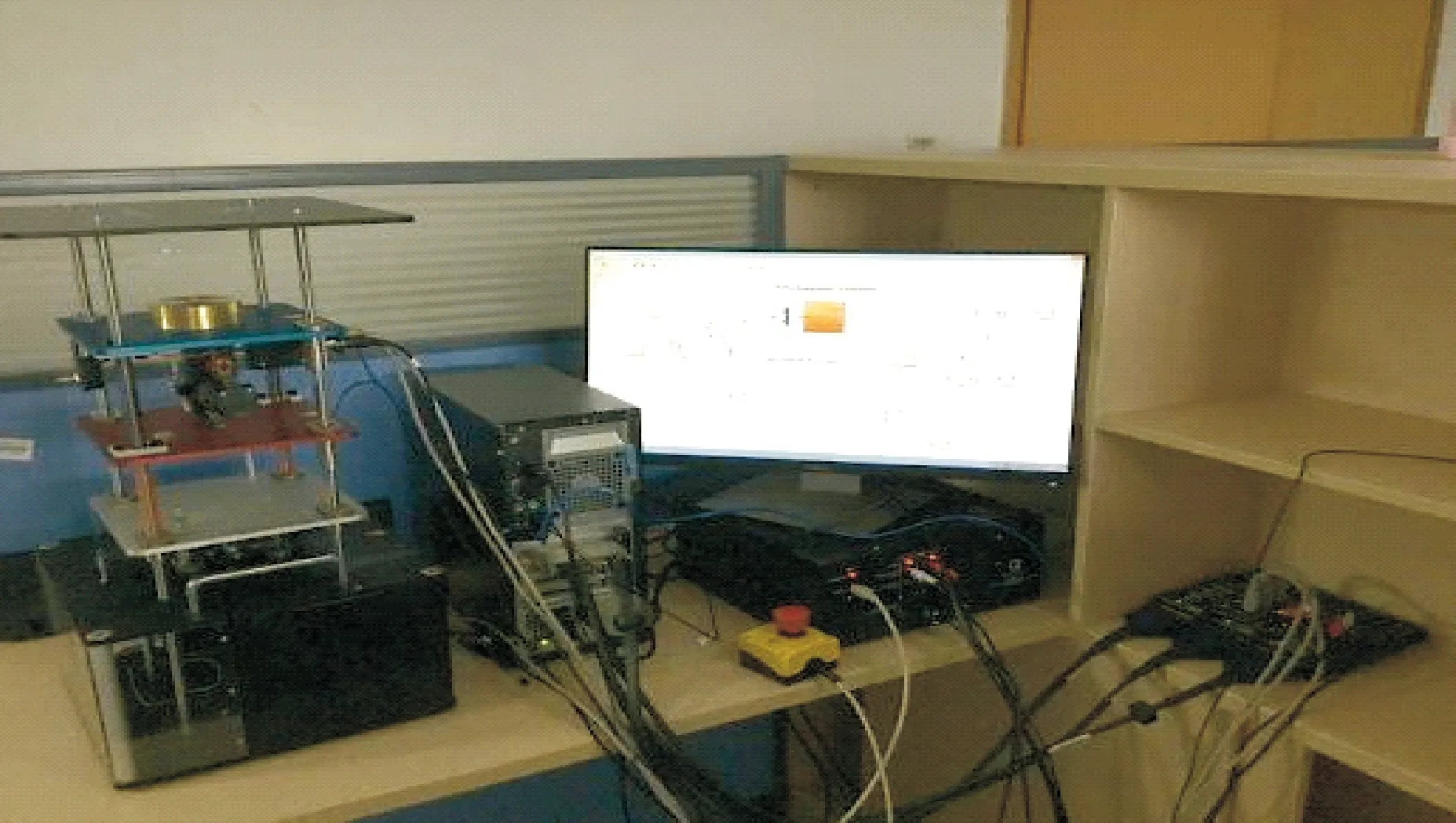
图4 主动悬架系统试验图

=3 s
(32)
图5为悬架系统在脉冲路面干扰下的响应曲线。从图5(a1)(b1)中可以看出有限频域控制器比全频域控制器产生更小的车身加速度值,这显示着有限频域控制器能更好地抑制振动,从而提高车辆的乘坐舒适性。从图5(a2)(b2)(a3)(b3)中可以看出相对悬架动行程和相对轮胎动载荷均小于1,这说明了有限频域控制器和全频域控制器均可使悬架系统满足机械硬约束,处于稳定的工况。从图5(a4)(b4)中可以看出两种控制器的主动力输入均小于20 N,其中有限频域的主动力略大,这也是产生更好振动抑制性能的支撑。综上所述,脉冲路面激励的实验和仿真结果验证了有限频域控制器的有效性和优越性。
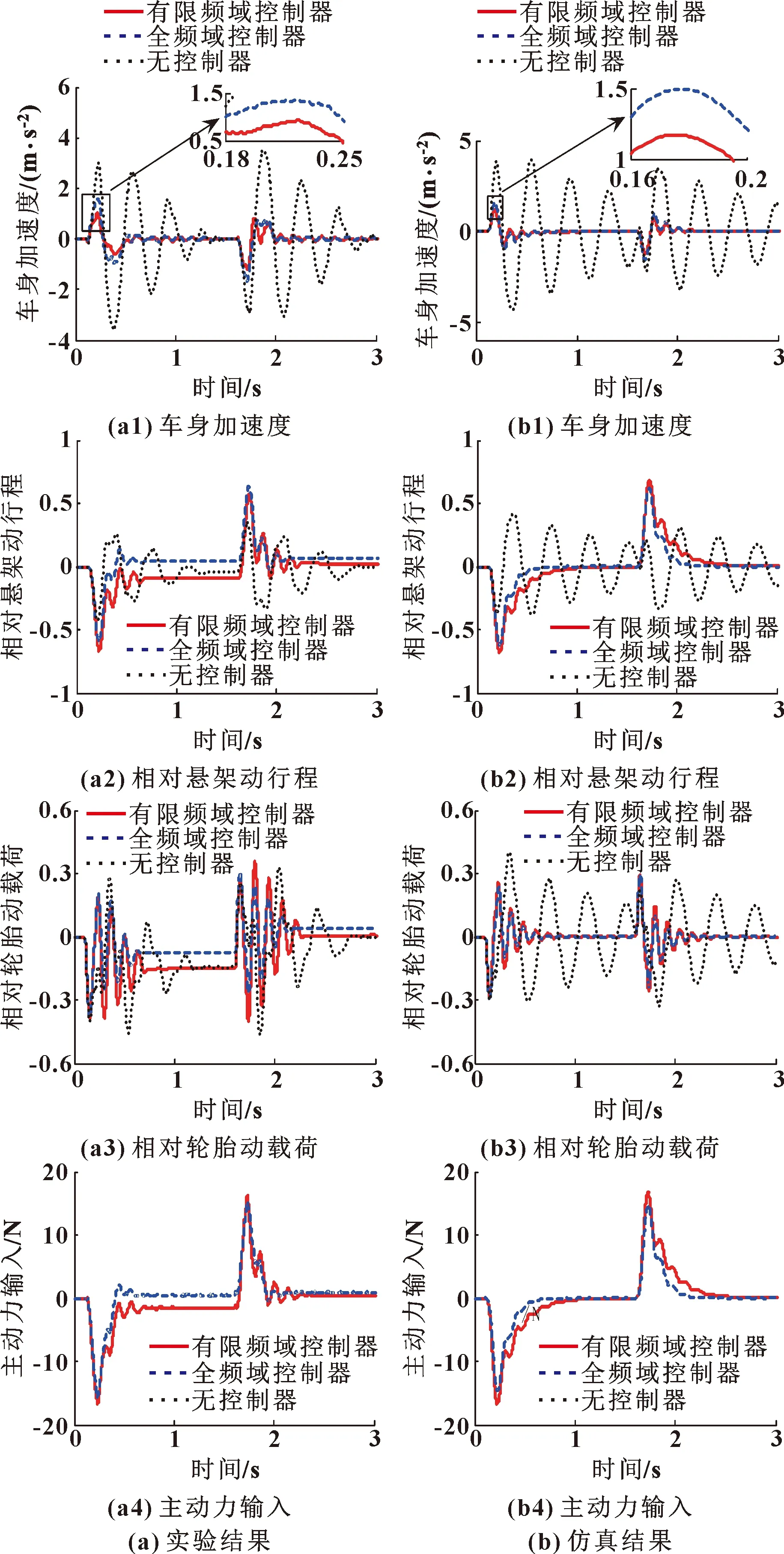
图5 脉冲激励下系统响应
其次,给出频率为4 Hz的正弦路面激励进行实验和仿真,如下:
()=001sin(2π)
(33)
其中:=4 Hz。
从图6(a1) (b1)中可以看出所提出的有限频域控制器相较于全频域控制器能更好地抑制振动。这说明了有限频域输出反馈控制方法在提升悬架系统乘坐舒适性具有良好的效果。从图6(a2)(b2)(a3)(b3)可以看出悬架系统的机械约束包括相对悬架动力行程和相对轮胎动载荷均在规定范围内,这说明了悬架系统处于一个稳定的工况。从图6(a4)(b4)可以看出执行器主动力几乎限制在15 N之内,这显示了执行器的输出是可行的。综合所述,文中提出的有限频域输出反馈器在提升车辆乘坐舒适性方面具有较好的优越性。
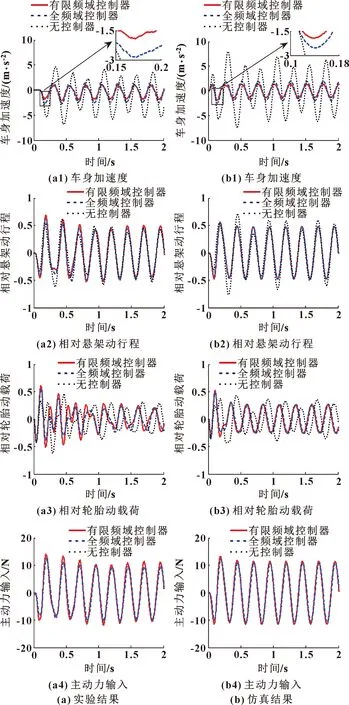
图6 正弦激励下系统响应
总而言之,实验和仿真结果说明了所提有限频域控制方法能更好地提升车辆乘坐舒适,同时保证了悬架系统的稳定性。
4 结论
针对有限频域干扰下的主动悬架系统,以提升悬架系统乘坐舒适性和满足其机械硬约束为目标,提出一种基于启发式两步法的输出反馈控制算法。首先,给出了一种有限频域性能指标判据,通过引入合适的乘子矩阵推导出了悬架系统性能分析的充分条件。其次,通过应用矩阵变换分离了充分条件中的矩阵耦合项,进一步得到了用于有限频域控制器设计的可求解充分条件。基于启发式算法,提出一种具有两步的有限频域输出反馈控制的新方法。与全频域控制方法相比,文中提出的基于启发式两步法的有限频域输出反馈控制方法体现了更好的扰动抑制性能。最后,仿真分析和试验结果证明了文中提出的新方法比传统的全频域控制方法具有更好的控制效果,能更好地提升悬架系统的综合性能。
猜你喜欢
中等数学(2022年6期)2022-08-29
中学生数理化(高中版.高考数学)(2021年11期)2021-12-21
成都信息工程大学学报(2021年1期)2021-07-22
校园英语·上旬(2019年6期)2019-10-09
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
北京汽车(2016年6期)2016-10-13
火控雷达技术(2016年1期)2016-02-06
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26