一种用于双输入双输出液位控制系统的状态估计控制器的设计
2022-09-15 06:26张华伟吕宝占
机床与液压 2022年12期
张华伟,吕宝占
(1.广东松山职业技术学院机械工程学院,广东韶关 512126;2.河南理工大学机械与动力工程学院,河南焦作 454000)
0 前言
随着科技的发展,液位控制系统也变得越来越智能化。在化工、石油等行业中,双输入双输出液位系统是一种较为常见的设备。双输入双输出液位系统中的液位控制,是提高生产质量和效率的重要途径。由于双输入双输出液位系统存在集中扰动,给其液位控制带来了难度。
为控制双输入双输出液位系统的液位,研究者对其展开了大量研究。GURUMURTHY和DAS采用逆解耦技术将双输入双输出过程解耦为两个独立的单输入单输出过程。在稳定的频带内采用了Oustaloup递推逼近方法,逼近控制器的分数阶积分项,针对每个单输入单输出过程设计了控制器,采用频域方法对控制器参数进行整定,以实现对双输入双输出液位系统的控制。文献[8]采用等效传递函数,将双输入双输出过程分解为独立的单输入单输出模型,采用蝙蝠优化算法设计了对角分数阶PI/PID控制器,控制分解出的单输入单输出模型,以实现对双输入双输出液位系统进行控制。ABDALLA等设计模糊自适应PID控制技术对控制器参数进行自适应整定和微调,采用模糊自适应PID控制器控制耦合罐式液位系统,对双输入双输出液位系统进行控制。目前的一些方法虽然实现了对双输入双输出液位系统的控制,但忽略了系统中集中扰动的影响,控制准确度不高。
对此,本文作者对双输入双输出液位控制系统进行结构分析以及数学建模,采用线性扩张状态观测器建立估计方程,对双输入双输出液位控制系统中的集中扰动进行估计。将集中扰动引入控制过程,设计状态估计控制器。将状态估计控制器用于双输入双输出液位控制系统,求取其控制信号,以实现对双输入双输出液位系统的控制。通过对比实验的方法,验证所设计的状态估计控制器的控制性能。
1 双输入双输出液位控制系统结构
双输入双输出液位控制系统主要由水箱、水泵以及阀门等部件组成。图1所示为双输入双输出液位控制系统模型。

图1 双输入双输出液位控制系统模型
在图1中,T1~T5为水箱,V1~V3为阀门,Sn1和Sn2分别为检测水箱T3和T4中水位的传感器,Pm1和Pm2为水泵控制系统。在启动双输入双输出液位控制系统时,T3和T4中的原液分别经阀门V1和V2流入反应水箱T5中。Sn1和Sn2分别对原液水箱T3和T4中的液位进行检测,并将检测结果反馈给水泵控制系统Pm1和Pm2,Pm1和Pm2根据检测的反馈结果,控制水泵将供给原液箱T1和T2的原液分别送入T3和T4中进行补给,以保证原液箱T3和T4中的原液始终保持期望液位。
2 双输入双输出液位控制系统建模
双输入双输出液位控制系统为一阶时滞系统,其频域中的传递函数(), 可通过时滞因子和增益因子表示:
(1)
式中:()和()分别为输出和控制信号;为频域参数。
将式(1)转换到时域中可变形为
′()+()=()
(2)
在双输入双输出液位控制系统中,会存在输入扰动的影响()。在考虑输入扰动影响时,在式(2)的基础上,可得出系统在输入扰动下的时域方程:
′()+()=()+()
(3)
令=,通过式(3)可得:

(4)
将用建模误差Δ和已知增益时滞比表示:
=+Δ
(5)
将式(5)代入式(4)可得:
′()=()+()
(6)
式中:()为集中扰动,表达式为

(7)
将()和()分别用()和()表示,则双输入双输出液位控制系统的状态空间方程为
(8)
式中:()为集中扰动变化量。
3 状态估计控制器的设计
从双输入双输出液位控制系统的状态空间方程可见,在双输入双输出液位控制系统的控制过程中存在着集中扰动。由于集中扰动是不可测量的,只能对它进行估计。为克服集中扰动的干扰,设计扩展状态观测器,对集中扰动的扩展状态进行估计,以实现对双输入双输出系统液位的准确控制。
令()和()分别为()和()的估计状态,采用线性扩张状态观测器(*),设计()和()的估计方程为

(9)
式中:为估计误差;(=1,2)为观测器增益参数,与观测器的带宽有关:

(10)
将集中扰动()引入控制过程,设计状态估计控制器:
()=()-()
(11)
式中:()为比例控制器的输出,表达式如下:
()=[()-()]
(12)
式中:为比例增益;()为期望信号。
在式(9)的基础上,利用设计()的降阶估计方程:

(13)
令=()-(),此时式(13)可表述为

(14)
通过式(14)可得()的扩展状态方程为

(15)
根据式(11)可得控制器的状态方程为

(16)
此时系统的闭环传递函数()为

(17)
当且仅当以下边界区域条件成立时,式(17)所示系统的阶跃响应为单调递增而无超调。

(18)
将状态估计控制器用于图1所示的双输入双输出系统,建立如图2所示的控制过程。
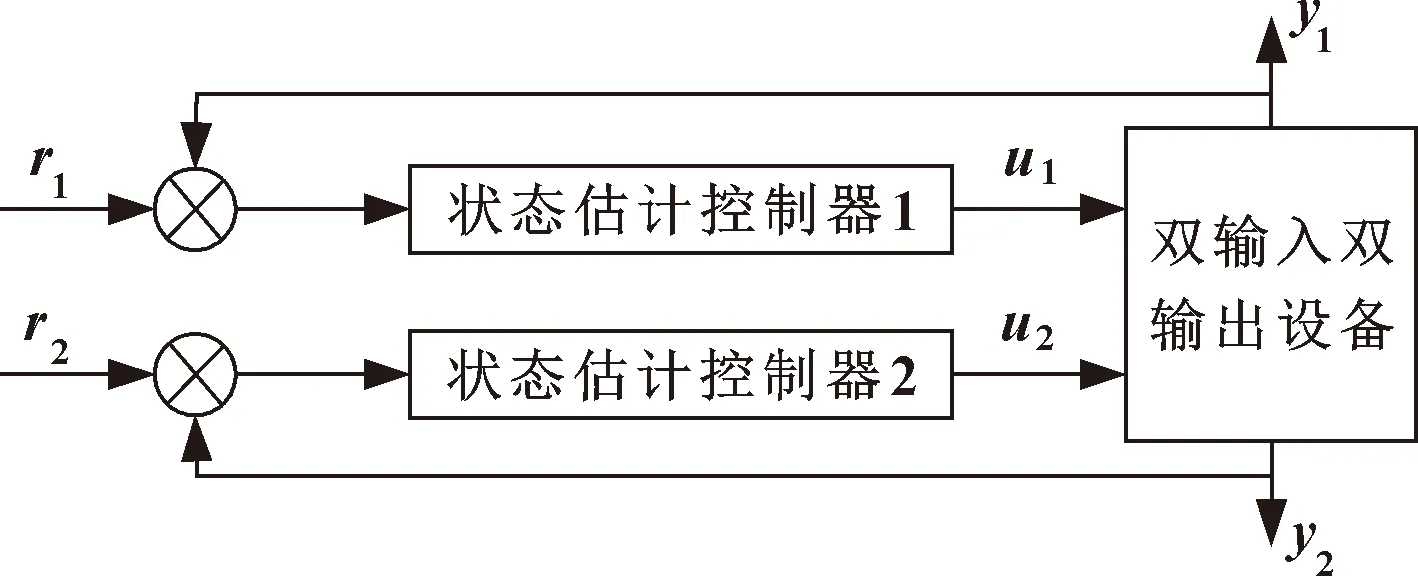
图2 基于状态估计控制器的双输入双输出系统的控制过程示意
图2中,、、(=1,2)分别为双输入双输出系统的期望信号、控制信号以及输出信号。
对于该双输入双输出系统,根据式(9)可分别得出其输入输出通道1和输入输出通道2的估计方程和:
(19)
(20)
式中:、分别为通道1和通道2的估计误差;、分别为通道1和通道2的输出的估计状态;、分别为通道1和通道2的增益时滞比;、分别为通道1和通道2的相对估计误差;、分别为通道1和通道2对应集中扰动的相对估计状态。
根据公式(13)可得通道1和通道2的降阶估计方程分别为

(21)

(22)
根据式(11)可得通道1和通道2的控制信号分别为

(23)

(24)
4 实验结果
为验证所设计的状态估计控制器的有效性,利用MATLAB/Simulink软件进行仿真实验。采用对比分析方法,引入干扰观测器(Disturbance Observer,DO)方法,与所设计的状态估计控制器(State Estimation Controller,SEC)方法共同实验。通过对比分析DO方法与SEC方法的实验结果,分析各方法的控制性能。
4.1 恒定液位控制测试
将两个水箱的期望液位设为恒定值,其中水箱1的液位设为水箱总高度的60%,水箱2的液位设为水箱总高度的50%。通过DO方法和SEC方法,对水箱实际液位的高度进行控制,根据各方法的控制结果,分析其控制效果,结果如图3所示。

图3 SEC方法和DO方法对恒定液位的控制结果
由图3可见:SEC方法和DO方法都能控制水箱液位朝着期望液位变化,但SEC方法的控制效率和控制准确度都高于DO方法。具体表现为,在对水箱1进行液位控制时,SEC方法在=4.1 s左右就使得控制液位达到了期望液位高度,经过短暂调节后,SEC方法的控制液位曲线便趋于期望液位曲线;DO方法在=6.2 s左右才使得控制液位达到期望液位高度,而且达到期望液位高度后,与SEC方法相比, DO方法调节了较长时间后控制液位曲线才趋于期望液位曲线; SEC方法的控制液位曲线最大偏移量为6.77%,DO方法的控制液位曲线最大偏移量为12.92%。对比SEC方法和DO方法对水箱2恒定液位的控制结果,也可以发现:SEC方法控制的液位曲线比DO方法控制的液位曲线更早达到期望液位曲线,并且相对于期望液位曲线,SEC方法控制液位曲线的超调量小于DO方法的控制液位曲线的超调量。对比可知,在对恒定期望液位的控制过程中,SEC方法的控制液位曲线比DO方法的控制液位曲线波动更小,更贴合于期望液位曲线。由此可见,与DO方法相比,SEC方法对恒定液位的控制过程效果较好。
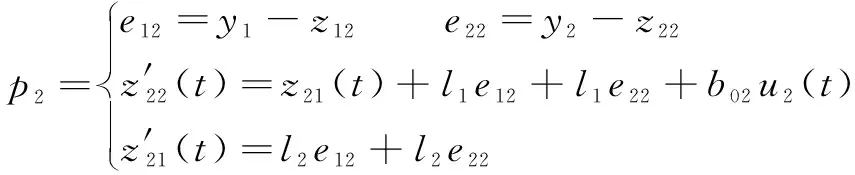
在对恒定液位控制时,SEC方法和DO方法对应的控制信号变化过程如图4所示。可见:SEC方法控制恒定液位时控制信号的波动比DO方法的波动更小,且SEC方法的控制信号比DO方法的控制信号更平稳。由此可见,与DO方法相比,SEC方法对恒定液位的控制更平稳。
图4 SEC方法和DO方法对恒定期望液位控制时控制信号的变化情况
4.2 变化液位控制测试
采用SEC方法和DO方法对变化期望液位进行控制,以进一步观察SEC方法和DO方法的控制性能,结果如图5所示。

图5 SEC方法和DO方法对变化期望液位的控制结果
由图5可见:在对水箱1液位进行控制时,在=8 s附近,SEC方法和DO方法的控制液位曲线都出现了第1次的较大超调现象,随后SEC方法的控制液位曲线还出现了两次较大的超调现象,但经过短暂调整后,SEC方法的控制液位曲线迅速趋于期望液位曲线;在出现第1次较大超调后,DO方法出现了5次较大的超调现象,而且出现超调后,需要调整较长时间,才能使得其控制液位曲线趋于期望液位曲线。在控制水箱1液位的整个过程中,较期望液位曲线而言,SEC方法的控制液位曲线出现的最大偏移量为6.46%,DO方法的控制液位曲线出现的最大偏移量为12.62%。对比SEC方法和DO方法对水箱2的液位控制可以发现:在整个控制过程中,SEC方法的控制液位曲线相对期望液位曲线出现了1次较大的超调现象,DO方法的控制液位曲线相对期望液位曲线出现了3次较大的超调现象;在出现超调现象后,SEC方法能够快速地调整控制液位曲线回归于期望液位曲线,而DO方法需要较长的时间调整。说明SEC方法对变化液位的控制具有较好的效果,能够较快速地适应液位的变化情况,体现了SEC方法对双输入双输出液位控制系统的良好控制性能。
5 结语
本文作者分析了双输入双输出液位控制系统的结构特点,对其进行了数学建模。通过时滞因子描述了双输入双输出液位控制系统的传递函数,在考虑集中扰动的情况下,建立了双输出液位控制系统的状态空间方程。采用线性扩张状态观测器,构建了系统的估计方程。利用比例控制器,构造了包含集中扰动在内的状态估计控制器,并在此基础上建立了控制器的状态方程以及系统的闭环传递函数。结合双输入双输出液位控制系统的特点,利用所设计的状态估计控制器,求取了适用于双输入双输出液位控制系统的控制信号,以对其液位进行控制。结果表明:所提方法对双输入双输出液位系统的控制效果较好,能够控制系统液位快速按照期望液位变化,可实现对双输入双输出液位的准确控制。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
科技创新与应用(2020年19期)2020-06-23
小资CHIC!ELEGANCE(2019年40期)2019-12-10
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
汽车维护与修理(2015年2期)2015-02-28
中国科技纵横(2014年15期)2014-12-11
中小学心理健康教育(2014年7期)2014-04-21