
混凝土结构桥梁外观智能检测方法研究
2022-09-20 07:58张根合张建雄任胜龙
科技创新与应用 2022年26期
张根合,张建雄,任胜龙
(中交公路养护工程技术有限公司,北京 100037)
在改革开放40多年的桥梁建设发展黄金期内,我国建造了大量的混凝土桥梁,由于国家交通线网不断完善和物流行业飞速发展,超大型运输车和超重车数量日益增多,公路交通量迅猛增长,这些桥梁大多已经提前进入“老龄化”[1],加上施工、材料退化、日益增长的交通压力与桥梁管理养护理念发展滞后等原因,即使是在役新桥,在投入使用后不久便会出现裂缝等病害,随着安全事故日益增多,严重影响桥梁的营运状态与正常使用寿命[2-3],目前我国危桥比例约占桥梁总比例的1/9,且比例还在提高[4]。针对以上背景问题,行业内提出建管养运一体化,将建管养运各环节可能遇到的问题,提前纳入到设计阶段协同考虑[5]。桥梁外观定期检测在桥梁运营阶段不可忽视,及时发现结构损伤能有效降低安全事故的发生率,是确保桥梁健康安全工作的前提。传统混凝土桥梁外观检测是通过桥检车利用其伸缩平台将检测人员送至桥梁指定位置进行近距离目测经验估值[6],检测危险性大,检测工期长,且会受检测人员的主观性影响,不能客观准确评价混凝土桥梁的实际服役状态[7]。针对以上问题,计算机图像处理技术、远距离非接触式的智能外观检测技术开始兴起并成功运用于实际工程检测当中。
1 无人智能桥梁检测车
无人桥检车智能桥测系统主要由智能检测车、机械手臂系统和图像处理系统3部分组成[8]。无人智能桥梁检测车如图1所示。
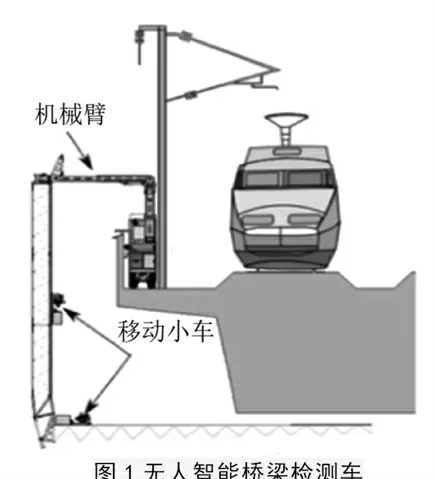
图1 无人智能桥梁检测车
机械手臂系统可拍摄整个预定范围,图像处理系统集照片拍摄、处理及分析功能于一体。在检测车及机械手臂系统的辅助下,图像处理系统可以用搭载的高分辨率工业电荷耦合器件(CCD)摄像机自动捕获桥梁底表图像,三维摄像机捕获密集的三维点云,旋转平台上的激光测距仪(LRF)可以获得桥梁底部表面的三维模型,然后与信息通信技术相结合,在高频频率下估计智能检测系统的初始工作形态。利用获取的三维桥梁模型,可完成图像采集任务的规划,包括检测路径规划、多连杆臂的伸缩和远程检测系统的定位规划,无人桥检车以最低速度按照规划路线对图像进行采集,然后对一定数量的图像进行拼接成为清晰完整的图像,用户可依靠电脑辅助设计软件协同专用插件浏览拼接生成的桥梁结构全景图,对桥梁缺陷进行测量与统计分析,系统将裂纹检测算法应用于拼接全景图,通过图像采集及分析系统处理检测到的桥梁缺陷,可以获得良好的检测结果,无人智能桥梁检测车的裂缝检测结果样例如图2所示。该系统极大提高了桥梁健康状态评定及养护的效率、安全性和完整性。

图2 无人智能桥梁检测车裂缝检测结果
2 以无人机为载体的桥梁裂缝检测的图像及深度学习检测方法
无人桥检车虽然省略了检测员现场直接检测的环节,缩短了外业周期,但是采用图像处理系统生成的结构全景图中的缺陷仍然需要人工去测量与统计,另外没有摆脱必须搭脚手架或依附于桥检车的问题,搭设脚手架或使用桥检车进行桥梁定期检测通常会占用行车道,影响交通,增加道路部门和交警部门的成本投入[9],鉴于此,以无人机为载体的桥梁裂缝检测的图像及深度学习检测方法得到迅速发展,走在了混凝土结构桥梁裂缝检测的前沿。
2.1 无人机检测
随着航拍和遥感技术不断发展,无人机检测技术已经进入到桥梁工程领域[10-12]。目前行业使用的无人机检测系统由无人机、地面站、数据传输和任务荷载、摄影摄像系统及其他设备组成,系统的综合性更有利于数据的检测和收集。而随着无人机技术的不断发展,目前所使用的无人机都是结合桥梁检测实际需求选择的针对性技术形式,四旋翼无人机是目前使用最广泛的多旋翼无人机,由电调直接驱动电机,并且结合发送给电调的脉冲宽度调制(PWM)信号控制电机的转速,结合其各个旋翼与升力的关系自由控制速度,实现其对拍摄的角度和内容的控制。无人机检测流程可大致划分为3个阶段:飞行路径规划、病害数据采集和病害图像数据处理,各阶段涉及技术要点见表1。

表1 无人机检测技术要点
2.2 无人机定位、导航技术
桥梁结构复杂,体系多样,且周边环境复杂,不可避免会对近地飞行的无人机GPS信号造成干扰,故而无人机仅依靠GPS信号进行定位和导航难以满足桥梁检测需求。此外,采集桥梁病害数据时还需获取无人机与桥梁构件的相对定位,明确病害位置。因此,为了保证无人机的定位除依靠GPS信号外,还需通过计算机视觉定位和超声波定位等其他技术进行辅助。计算机视觉定位技术较为成熟,应用相对广泛,缺点是对图像处理和计算能力要求很高,易受光线、镜面反射等因素的影响,其原理是对无人机视觉传感器所获取的各个方向的图像进行图像处理和特征点提取,获得目标的图像坐标,再反算获取无人机的空中定位。超声波定位技术成本低、适用性强,但测距限制较大,导航精度较差,其原理类似于声呐系统,利用超声波的反射获取不同方向障碍物的距离,依靠反射波确定无人机的空间定位。目前,2种辅助技术配合GPS信号定位导航基本可满足桥梁检测对无人机定位、导航技术的要求。
2.3 无人机飞行路径智能规划与自主避障技术
续航一直是无人机发展面临的一个重要问题,其会影响无人机飞行检测持续时间,此外,桥梁周边环境复杂,存在各种障碍物,无人机在进行桥梁检测时极易发生碰撞、摔机等事故,因此,合理规划无人机的飞行路径与自主避障技术对提高桥梁检测效率和质量具有重要意义。路径规划是指在存在障碍物的环境中,为无人机寻找一条从起点到目标点的安全路径[13]。对无人机预设规划路线进行智能规划需要引入相关算法,目前以人工势场法[14-16]为代表的路线规划自主避障技术已经在无人机领域得到应用与发展,但无人机进行桥梁检测需要桥下飞行,此项技术如何适用于桥下环境尚需进一步研究。
2.4 检测数据图像识别技术
无人机检测技术所采集的桥梁病害检测影像数据不仅数量巨大,而且图片重叠度较高,若采用人工查看不仅效率低,还会由于视神经疲劳出现遗漏,为解决此问题,Yamaguchi等[17]提出了基于机器视觉的自动检测系统,图像识别的准确性和速度是机器自动检测系统的关键。桥梁检测领域机器视觉技术逐渐取代劳动密集型的人工检测已成为必然。
科研工作者们在过去20年里尝试基于图像处理、模式识别和计算机视觉技术,设计智能高效且劳动强度低的裂缝识别设备。基于图像的裂缝检测过程如图3所示。
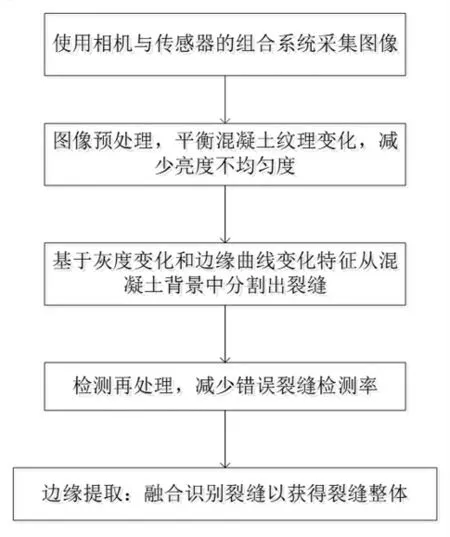
图3 基于图像的裂缝检测过程
识别设备主要依赖于高精确的图像分割算法,随着发展先后出现了基于自适应阈值的算法、基于滤波器的算法、基于深度学习(DL,Deep Learning)的图像识别算法和基于Lab VIEW开发平台+视觉开发模块(Vision Development Module,VDM)的裂缝分析方法等[18-20],甚至将诸如人工神经网络和支持向量机等许多研究领域中最热门的机器学习算法引入其中,利用这些机器学习技术,对桥梁裂缝进行分类[21-22]。近年来,随着图像采集和计算机运算能力飞跃式发展,在图像识别领域又提出了一种更高效的机器学习算法——基于卷积神经网络框架的深度学习,该技术利用卷积神经网络的深层特征框架检测混凝土裂缝,不需要人工设定裂缝特征,深度融合卷积神经网络经过不断改进已经运用到钢箱梁内部裂缝检测中[23]。基于深度学习的自主图像识别技术已经在桥梁裂缝检测方面得到应用,目前,自主图像识别技术可识别出宽度为0.1 mm的裂缝,虽然适用于桥梁裂缝检测数据图像识别的需求,但其识别精度还有待进一步提高。
3 结束语
由于建设背景与国内交通环境的综合影响,我国大量在役混凝土桥梁进入“老龄化”,为确保服役桥梁健康安全,对其实际营运状态与服役寿命需要进行及时评估,从而促进混凝土结构桥梁外观检测技术的发展。在桥梁智能化时代,远距离非接触式的智能检测技术兴起,其核心技术为自主图像识别技术,未来桥梁外观智能检测技术发展的方向将是如何改进裂缝识别算法,进一步提高自主图像识别精度。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
大众标准化(2022年10期)2022-02-06
铁道建筑(2020年8期)2020-09-04
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
中国交通信息化(2019年4期)2019-07-13
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年19期)2018-11-14
电子制作(2018年18期)2018-11-14
减速顶与调速技术(2018年1期)2018-11-13
