面向复杂环境的自适应GNSS 接收机设计
2022-09-23 09:19周启平
电声技术 2022年7期
周启平
(安徽继远软件有限公司,安徽 合肥 230088)
0 引言
城市化的快速发展,给城市应对行政、基础设施、物流和运输等问题带来了一系列挑战。针对如此高动态且要求严格的环境,准确可靠的定位、导航和定时(Positioning,Navigation and Timing,PNT)服务对于海上导航、交通安全、电力、铁路、警务及农业等民用和军事应用至关重要。全球导航卫星系统(Global Navigation Satellite System,GNSS)通过利用精密单点定位(Precise Point Positioning,PPP)技术,可以在开放环境下提供准确可靠的厘米级定位服务。定位导航界普遍使用多星座GNSS作为定位和导航的主要手段,然而在高动态的复杂环境中,由于信号阻塞、衰落/阴影、多径(Multipath,MP)和干扰等因素,全球导航卫星系统的可用性、连续性和准确性可能会受到影响。在这种环境中,卫星信号被反射、散射、波动,有时被高层建筑的屋顶和墙壁、跨线桥和复杂的道路场景完全阻挡,使得定位信息不准确、不可靠且基本不可用,导致导航服务减少或无服务。
1 系统简介
全球导航卫星系统由空间段、控制和监测段以及用户段组成。GNSS 接收机通过处理接收到的GNSS 信号和估计行程时间,从导航信息中得到卫星位置(xk,yk,zk),其中k表示卫星编号。接收机使用卫星位置来估计接收机与第k颗卫星之间的距离,即伪距,最终利用不同卫星的伪距得出用户位置的最终估计值(x,y,z)。目前主流的高精度定位技术包括标准GNSS、差分全球卫星导航系统(Differential Global Navigation Satellite System,DGNSS)、实时查分定位(Real-Time Kinematic,RTK)、星基增强系统(Satellite-Based Augmentation System,SBAS)以及PPP 等,各定位方式的精度等级如表1 所示。
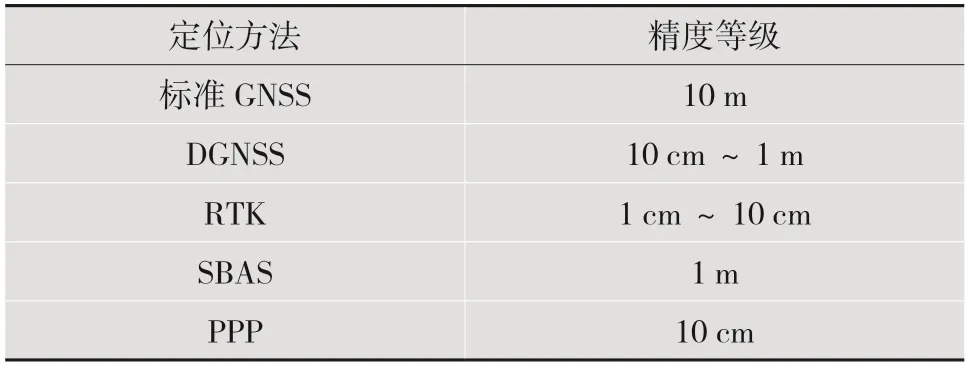
表1 定位方法精度等级比较
PPP 定位方法相比于其他方法具有一定优势。其通过使用双频伪距和载波相位测量以及星历校正可为用户提供高精度定位。PPP 与标准定位服务的比较如图1 所示。在PPP 中,需要针对电离层延迟、对流层延迟、时钟偏差、多径以及其他测量噪声引起的误差加以考虑。

图1 标准定位服务与PPP 算法比较
上述提及的大多数误差基本上为确定性误差,可以通过可用模型进行误差均衡。然而,由于其高动态性和随机性,在许多情况下,多径或非视距误差等误差难以消除。近年来,有多项研究提出了在不同层面上对多径信号进行检测、建模和抑制的技术,如天线、接收机、测量和位置。文献[1]讨论了一些抑制多径的常见技术,其核心思想为:对受影响的测量结果进行去权重,采用双极化天线,使用矢量跟踪回路;基于导航处理器的技术,将一致性检查应用于伪距测量。文献[2]聚焦于仰角和载噪比来抑制多径效应。文献[3]使用双极化天线来抑制多径,提高定位精度。这些技术可以在一定程度上减小多径误差,但想要在开放环境中完全消除它们,对于导航接收机而言,面临很高的挑战。
在开阔环境下,PPP的平均定位误差小于1 m[4]。对于弱信号环境,由于信号阻塞和MP/NLOS 导致导航服务中断或性能下降的可能性很大,即使接收机配备了额外的误差建模,也可能无法达到该精度水平。
针对卫星导航系统面临的挑战,本文全面研究了在低动态和高动态多径环境中可能影响全球导航卫星系统性能的潜在漏洞,如开放环境、具有视距(Line of Sight,LOS)和非视距(Non Line of Sight,NLOS)信号的部分退化环境以及无视距信号接收的高多径环境[5]。
本文针对可用性、信号特性、服务连续性和准确性等方面,对距离均方根差(Distance Root Mean Square,DRMS)、圆概率误差(Circular Error Probable,CEP)和精度稀释(Dilution of Precision,DOP)等特性进行详细分析。为了提高接收机在高动态多径环境下的性能,提出了一种基于自适应环境的导航算法,并将其应用于GNSS 接收机中,基于环境检测和表征进行位置改进。
2 性能评估方法
为充分了解单星座和多星座GNSS 接收机在位置估计中遇到的问题,首先要对观测信号模型进行评估。由于地面接收机接收到的GNSS 信号比背景噪声弱,因此容易出现多种噪声源和误差源。用于位置估计的伪距方程可表示为

式中:ρk为接收机与第k颗卫星之间的伪距,k∈ {1 ,…,N},N为可见卫星数(N≥4);表示第k颗卫星与接收机之间的真实距离,Pk=(xk,yk,zk)为已知的第k颗卫星的位置,Pr=(x,y,z)为待估计的接收机位置,是第k颗卫星与空间效应相关的误差;εcb=c(dt-dTk)为由时钟偏差引起的误差,其中dt为接收机钟差,dTk为卫星钟差;在使用多星座的情况下,必须考虑系统间偏差Bτ;为与第k颗卫星相关的环境误差因素。
对于上述恒定误差源,可通过相关抑制模型进行均衡。然而,由于工作环境具有随机性和不可预测性,位置估计会受到严重影响。εek为与第k颗卫星相关的误差因素,仅由环境引起的误差建模为

式中:εβ为卫星可用性降低引起的误差,εNLOS/MP为与NLOS 接收或多径相关的误差,εG为几何结构不良引起的误差[6]。
综合上述误差,式(1)的伪距方程可表示为

2.1 卫星可用性和阻塞系数
卫星可用性定义为在特定时间由GNSS 接收机在特定位置锁定的卫星数量,并通过阻塞系数β进行量化。β通过比较特定观测环境和开阔环境中锁定卫星的数量估计得出,观测环境包括室内、信号被遮挡甚至无信号等场所。阻塞系数β可表示为

式中:VSavg为晴空环境中检测到的平均卫星数,BSavg为给定时间间隔内观测环境中检测到的平均卫星数[7]。
2.2 连续性和服务中断
安全和安保关键应用要求对PNT 解决方案进行准确、及时和不间断的估计。连续性可以定义为系统在没有任何中断或故障的情况下运行的能力。在本文中,连续性通过接收机锁定的信号丢失来量化,信号丢失与否取决于信号强度(Signal Intensity,SI),而信号强度会受到非视距接收、多径、衰落等因素的影响。在高动态的环境中,由于多径、非视距和衰落等因素,信号强度可能会随机波动,这使得接收机锁定卫星变得困难。SI可表示为

式中:Pmax和Pmin分别为接收信号的最大和最小功率电平[8]。只要SI大于某一水平,就有可能发生失锁事件。因此,SI可用于确定特定卫星信号失去锁定的次数和连续性因子δ,δ表示为

式中:VStotal表示可见卫星的总数,BSloss表示发生失锁事件的卫星总数。当(VStotal-BSloss)<N时,GNSS 服务将发生中断。
2.3 精度和准确度测量
GNSS 接收机的效率由其提供的精度和准确度来评估。准确度是指接近真实位置的程度,而精度是指接近平均值或真实位置的程度。
对于静态GNSS 接收机,报告位置一般分散在某个区域,这种分散是由于测量误差造成的。准确度和精度是用来分析接收机效率的关键参数。在本文中,所使用的准确度和精度测量如下所述。
2.3.1 准确度评估
为了分析和量化GNSS 性能,使用置信区域来测量准确度。在本文中,使用CEP 和DRMS 两个因素来估计准确度。
(1)CEP。CEP 是在以天线真实位置为圆心的圆内,偏离圆心概率为50%的二维点位离散分布度量。CEP 表示为

式中:σx表示估计位置坐标(x,y)的标准差。
(2)DRMS。DRMS 是一种二维准确度评估度量,预计65%的测量位置位于置信区域内,DRMS表示为

式中:σ2表示估计位置坐标(x,y)的方差。置信区域半径高度依赖于定位误差,随着误差增加,半径会增大,导致准确度降低。
2.3.2 精度稀释
GNSS 接收机报告位置的精度可能会受到卫星几何的影响,在轨卫星的数量和几何位置会导致位置不确定性,一般采用DOP 来量化。位置DOP(Position Dilution of Precision,PDOP)是指由卫星的相对位置和卫星的几何形状引起的定位误差。PDOP 值小于1,意味着良好的卫星几何形状。随着PDOP 值开始增加,误差也开始增大。PDOP 可表示为

3 自适应GNSS 接收机设计
在大多数情况下,GNSS 系统可以提供可接受的定位精度。然而,在高动态多径等环境中,不同工作条件下GNSS 的性能具有较大差异。尽管组合导航系统可以在一定程度上提高系统可用性和准确性,但不能保证无处不在的定位和导航。因此,必须设计出一种可靠的模型来进一步提高GNSS 接收机性能。当前,对于提高GNSS 接收机性能的常见方法有:
(1)通过增加在轨卫星数量来显著提高城市地区PNT 服务的可用性,但对于高度退化环境效果并不大;
(2)通过最小化MP/NLOS 对定位精度的影响,将MP/NLOS 信号视为干扰,降低在天线或接收机侧的影响权重,可在一定程度上提高定位精度,但在卫星可用性有限的密集多径环境中可能会导致信号中断。
大多数研究方法主要依靠信号强度、卫星可用性及DOP 等信号特征来表征环境,但在多星座多频率(Multi-constellation Multi-frequency,MCMF)情况下,信号强度对环境检测效果有限,其原因有:MP或NLOS 对信号强度影响较大;在多星座的情况下,在信号级监测大量卫星会产生严重负荷;信号强度受到接收机效率、天线仰角等很多因素影响。因此,使用MCMF 系统时,信号强度并非合适的选择。
本文提出一种基于复杂环境的自适应导航算法,以提高定位的可用性和准确性。该算法基于环境检测和特征描述,使用MCMF 接收机配置进行测试。自适应导航算法与以往模型之间的主要区别在于,其没有将信号强度用作环境检测的关键参数,而是使用可用性和准确性度量来进行环境检测和表征。自适应导航算法所使用的因素包括卫星可用性、阻塞系数、连续性系数以及PDOP。基于复杂环境的自适应导航算法工作流和GNSS 接收机设计方案分别如图2 和3 所示。

图2 基于复杂环境的自适应导航算法工作流
4 结语
为了克服多星座GNSS 的可用性、准确性和精度问题,本文提出了一种自适应导航算法。该算法基于信号特征模型来识别低多径、中多径和高多径环境以及阻塞系数。然后将所提出的自适应导航算法合并到GNSS 接收机中,根据检测环境的最低性能水平指标来更新跟踪环路参数,从而提高卫星在高动态多径环境中的可用性、准确度和精度,同时不会在处理能力或额外成本方面给接收机带来任何额外负担,具有良好的应用价值。
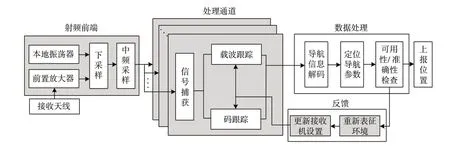
图3 GNSS 接收机设计方案
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
现代计算机(2021年14期)2021-11-20
中国电气工程学报(2019年18期)2019-10-21
科技视界(2016年16期)2016-06-29
中国教育信息化·基础教育(2016年4期)2016-05-30
科技资讯(2015年19期)2015-10-09
物联网技术(2015年1期)2015-01-26