基于低秩约束的旋转机械内激励激发的振源信号分离研究
2022-09-23 00:58贺志洋赵德尊程卫东
振动与冲击 2022年17期
贺志洋,赵德尊,娄 乐,程卫东
(1.北京交通大学 机械与电子控制工程学院,北京 100044;2.北京工业大学 材料与制造学部,北京 100124;3.北京计算机技术及应用研究所,北京 100854)
机械设备经过长时间的持续工作(尤其是超过12个月),整个系统受损的概率大大增加。对机械设备关键零部件状态监测和故障诊断是保障其安全稳定运行的有效手段。目前,对运行中机械设备进行振动分析是获取其健康状态行之有效的方法之一[1]。振动传感器从机械系统上采集到的信号是多分量信号[2],主要包含环境噪声分离,机械内部激励产生的振动信号分量和采集系统自身混入电路噪声分量。环境噪声和电路噪声会严重影响故障特征的提取和状态监测的准确性[3-4]。因此,分离反映机械设备健康状况的内部激励响应,对于准确把握机械健康状态具有重要意义。
现有的旋转机械振动源信号分离方法可以归纳为两类:去噪的方式和盲源分离法(BBS)。其中,去噪的方式在工程中应用最广泛。它往往利用滤波器(时域,频域,时频域滤波器)或信号分解方法,将混合信号分解成多个子分量的形式,再根据感兴趣信号或噪声信号的特征来确定保留或者去除某些子分量。从而实现分离出感兴趣信号的目的。因为必须事先获得感兴趣信号或噪声信号的统计特性,所以可以将其分为两类。一种是感兴趣信号的特性已知的分离方法。例如,在2006年,法国康普涅科技大学的Antoni等[5]首次提出了谱峭度方法,用来分离混合信号中的冲击振动响应和非冲击振动响应。2014年,中国石油大学王金江等[6]使用混合小波变换将故障振动源信号与变速振动信号分开。另一种是噪声特征已知的分离方法。2018年同济大学的余建波[7]提出了一种基于固有时间尺度分解与稀疏编码收缩集成的轴承故障特征提取方法,用于提取轴承的振动信号。例如,2015年,王天扬等[8]提出了一种增强的自适应噪声消除算法。该方法利用齿轮噪声源的特性来消除轴承故障信号中的齿轮噪声分量。所有这些方法都需要根据不同的振源信号的先验知识来选择或去除信号中的相关分量。
盲源分离方法[9-12]从21世纪初开始应用于机械故障诊断领域。它是从观测信号矢量出发,根据统计独立的分离或负熵最大化等准则搜寻分离矩阵,实现未知源信号矢量分离或恢复。张杰等[13]提出了一种基于自适应时频分布理论的盲源分离参数计算方法,解决了非平稳盲源分离问题,并将其应用于车轮缺陷检测。兰斯大学的Gelle等[14-15]使用N’guyen Jutten自适应算法成功分离了两个小型直流电动机产生的机械振动和声音的源信号,并研究了噪声信号对分离结果的影响。2015年,解放军理工大学的朱会杰等[16]利用移不变稀疏编码的盲源分离方法对轴承和齿轮故障的振源信号进行分离。
在实际工程中,作用于机体的振动激励源多种多样。当不确定机械设备的运行状态时,就无法准确获得对振动源信号或噪声敏感的统计指标等先验知识。因此,难以满足降噪分离方法的要求。盲源分离方法分离出信号幅度和相位不确定,且独立激振源的数量难以确定。当这些特征是通过估计和假设获得时,就可能导致了错分。因此,现有的振动源信号分离方法主要存在振动源信号不确定的问题,影响了振动源信号的分离。
针对上述问题,提出了一种低秩约束的振源信号分离方法。理想状态下,旋转机械或往复机械内部振源产生的信号往往具备低秩性,因此它是一种约束信号分离的通用特征。进而克服现有分离方法中存在的振动源信号特征不确定性问题。根据机械振动信号的实际情况,构建了多低秩噪声的分离模型和多低秩的分离方法。通过仿真和实验验证了该方法的有效性,并对比了独立分量分析的盲源分离方法,验证了该方法的优越性。
2 基于低秩约束的分离原理
2.1 振源信号的性质
旋转机械及往复机械的振源信号由于其周期性特点,具有如下性质:1振源信号由重复的是由多次重复的单个响应片段(也称为特征波形)组成。2相同振源的响应片段具有相似的模式,不同振源的响应片段在模式存在差异。3一个振源信号的需要片段具有一定的分布规律,分布规律与转速相关。
内激励响应的性质是多个振源信号划分的依据。性质1指出响应片段是机械振动信号的基本组成单位,要通过响应片段的差别来区分振源信号;性质2和3阐述了区别响应片段的模式维度和分布维度,依据这两个维度的差异区分振源信号与噪声。
2.2 分离原理
根据振源信号响应片段的性质可知,一个振源的多个响应片段是相似的,且由之组成的矩阵是低秩矩阵。在实际应用中,给定的数据往往是低秩或近似低秩的,但是由于噪声等其他原因使得给定的数据变得不再低秩。
鲁棒主成分分析(RPCA)[17-18]是有效的低秩恢复方法之一,该方法早期应用于图像恢复中。它将矩阵分解为两个矩阵之和:D=L+E,L是低秩矩阵,E关于噪声等的问题的矩阵,称为稀疏矩阵。
在机械设备的振动信号中包含的噪声并非是稀疏的。机械设备的振动信号中包含满足低秩的振源信号,还包含环境噪声和电路噪声。环境噪声中的偶然不规律冲击是稀疏的,电路噪声往往是高斯有色噪声,环境噪声还包含有白噪。所以这里并不能用稀疏矩阵来描述残余项。
多种环境噪声和电路噪声的混合噪声也是趋于高斯的。因为信号中的噪声主要为高斯噪声。
为了验证机械振动信号的中的噪声满足高斯分布,通过Lilliefors检验方法[19-21]对包含独立同分布的谐波噪声和环境白噪声的信号做高斯分布定性检测。其中假设符合高斯分布值为0,置信度为0.33>0.05(>0.05表示接受假设)。同时对内激励响应片段构造的内激励响应矩阵的对应点做Lilliefors检验方法,同样均满足高斯分布。同时,对上述信号的概率密度进行了统计,并与高斯分布进行对比,如图1所示。从图中可以看出概率密度与高斯分布基本吻合。并计算了该信号的期望与方差,其期望为-0.001,方差σ2为0.611,根据中心极限定理,各随机变量是独立同分布,且各满足有限方差,当数据量充分大时,满足服从正态分布(也称为“高斯分布”)。
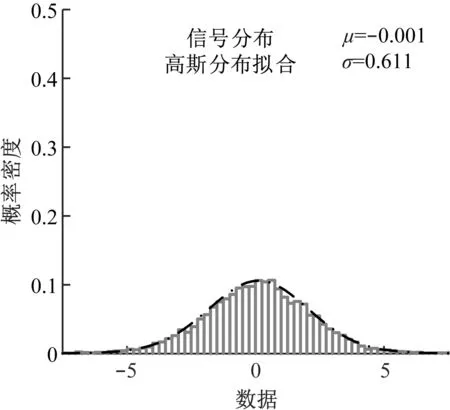
图1 概率统计分布图Fig.1 Probability statistical distribution diagram
因此,可以用高斯分布的噪声矩阵来描述机械设备振动信号中残余项。根据机械振动信号的组成,提出了一种低秩约束振源信号分离模型
(1)

s.t.D=L+N

s.t.D=L+N
(2)
传感器采集到的机械振动信号中,往往不止包含一个内激励激发的振源信号。而上述分离模型中,一次只能分离一个振动源信号。因此,为了满足从振动信号中同时分离出多个振动源的要求,将上述模型修正为多低秩约束的分离模型,如下所示
(3)
式中:n是待分离振源信号的数量;λ是低秩矩阵的权重。
设长度为m的一维振动信号为x(t),则低秩矩阵Li可以通过Li=(x,oi,pi):Rm→Roi×pi来获得。w是一个分块算子,其计算方法如图2所示。分块算子w可以实现从一维矢量x(t)到二维矩阵Li的变换。式中,o是低秩矩阵列的长度,p是低秩矩阵行的数量,o和p可以通过式(4)和式(5)计算得到
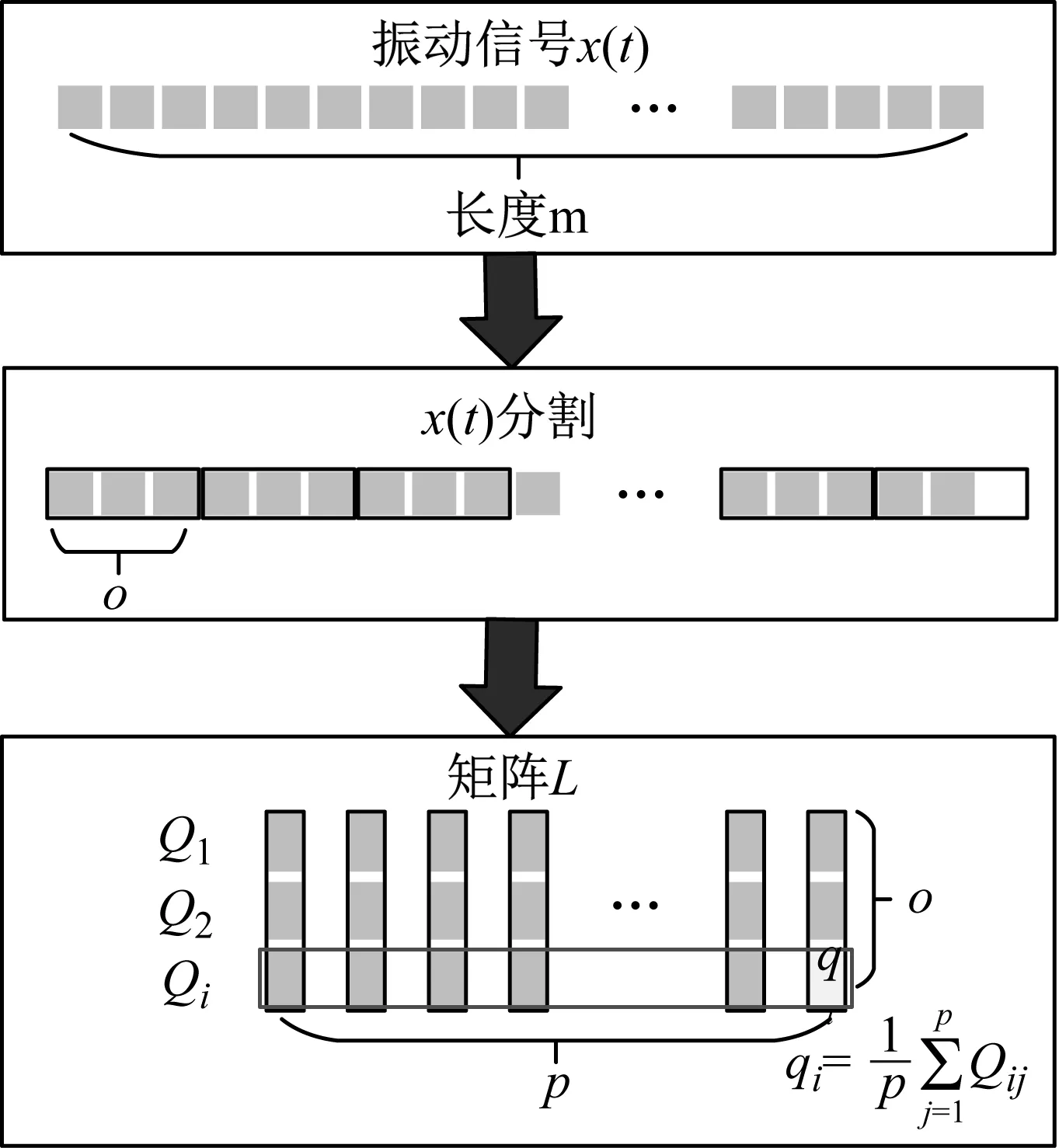
图2 分块算子计算方法Fig.2 The calculation method of block operator
(4)
(5)
式中,fs是采样频率,fsource i是振源信号的特征频率,可根据机械部件的几何特征和转速计算得到。
该模型可以使用增强的拉格朗日乘子法来解决凸优化问题。首先构造增强拉格朗日函数La:

(6)
式中:Y是拉格朗日乘子,μ是迭代步长;〈〉是内积运算。li是Li经过分块算子w的逆运算得到。将约束目标优化问题转化为求解增广拉格朗日函数的最小值问题,其最优解的表达式为
i=1,2,…,n
(7)

该优化问题求解使用交替方向乘子法(ADMM),每一步迭代过程可以分解为求各维度低秩矩阵核范数最小值优化问题和和噪声项的最小峰度。迭代过程如下所示

(8)
(9)

[Ui,Si,Vi]=SVD(w(Ti,k,oi,pi))
(10)
(11)
式中,SVD()是奇异值分解算子,Sλi/μk[]为正值参数,λi/μk软阈值收缩操作符,w()-1是分块算子w的逆用算,可将矩阵转化为一维向量。
(12)
式(12)这个子问题也可以用奇异值分解和软阈值操作求解,即:
(13)
(14)
式中,Sβ[]为正值参数,β的软阈值收缩操作符。
可以使用等式(10)、(11)、(13)和(14)来求解等式(8)、(9),更新li,k+1和Nk+1之后更新拉格朗日算子运算符Yk+1和阈值αk+1,更新方法如下:
(15)
αk+1=ραk,ρ=1.5
(16)
3 低秩约束的分离方法
根据第二节中的多低阶振动源分离模型,提出了一种多低阶约束振动源分离方法。分离方法主要由两部分组成:确定振动源信号和分离振动源,分离步骤如图3所示。
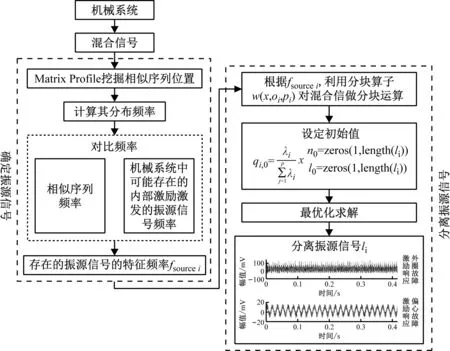
图3 多低秩约束振源信号分离方法Fig.3 The process of vibration source separation method with multiple low rank constraints
在确定振源的过程中,首先,使用Matrix Profile(MP)算法在混合信号中找到相似的序列。MP算法是一种用于时间序列中查找相似片段的算法,该算法可以快速找到时间序列中最相似的子序列对(motif)。然后,对比发现的相似序列的频率以及可能的振动源信号的频率。如果频率相等,则意味着在混合信号中存在振动源信号。

4 仿真分析
为了探讨低秩约束的振源信号分离方法的分离效果,构造了含有轴承内圈和外圈故障两个振源的仿真信号。轴承失效引起的冲击振动可以通过单自由度质量弹簧-阻尼器的方式来建模[23-25]。
s(t)=Ae-βtsinωr(t)u(t)
(15)
故障轴承振源信号模型可以表示为[26-27]

u(t-mTp)
(16)
式中,第m个故障脉冲的幅度为Am,u(t)为单位阶跃函数。Tp是由轴承故障引起的相邻脉冲的时间间隔,α是阻尼因子。ωr是轴承故障引起的共振频率。轴承内圈和外圈故障的模拟信号可以定义为:
x(t)=xbo(t)+xbi(t)+ns(t)
(17)
式中:xbo(t)是轴承外圈故障信号,xbi(t)是轴承内圈故障信号,ns(t)是白噪声,fs是采样频率。仿真信号的参数设置如表1所示,表中fo是轴承外圈故障特征频率,fi是轴承内圈故障特征频率,Amo是外圈故障信号振幅,Ami是内圈故障信号振幅,αo是外圈故障阻尼因子,αi是内圈故障阻尼因子,TPo是外圈故障周期,TPi是内圈故障周期。仿真信号如图4所示,图中的混合信号中难以观察到轴承故障的冲击响应。

图4 仿真轴承故障信号时域波形Fig.4 Time-domain waveforms of simulated bearing faults

表1 仿真信号参数Tab.1 Simulation Parameter
采用上述低秩约束的振源信号分离方法,对仿真信号中的轴承故障振动源信号进行分离。分别从时域波形和包络谱两个方面观察分离效果。
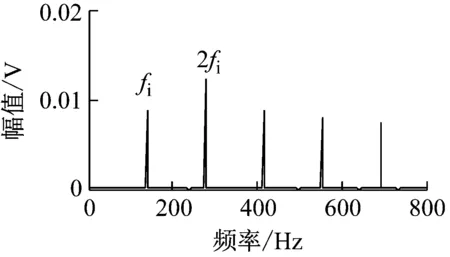
(1) 分离出的振源信号时域波形如图5所示,从图中可以看出清晰的内、外圈故障产生冲击响应。(2)为了观察分离出的内外圈轴承故障的成分,分别进行了包络谱分析,如图5所示。从图6的包络谱图中可以看出,内、外圈的故障特征频率fi和fo及其二倍频率处有明显的峰值,表明该分离方法可有效分离轴承内外圈故障的仿真信号。
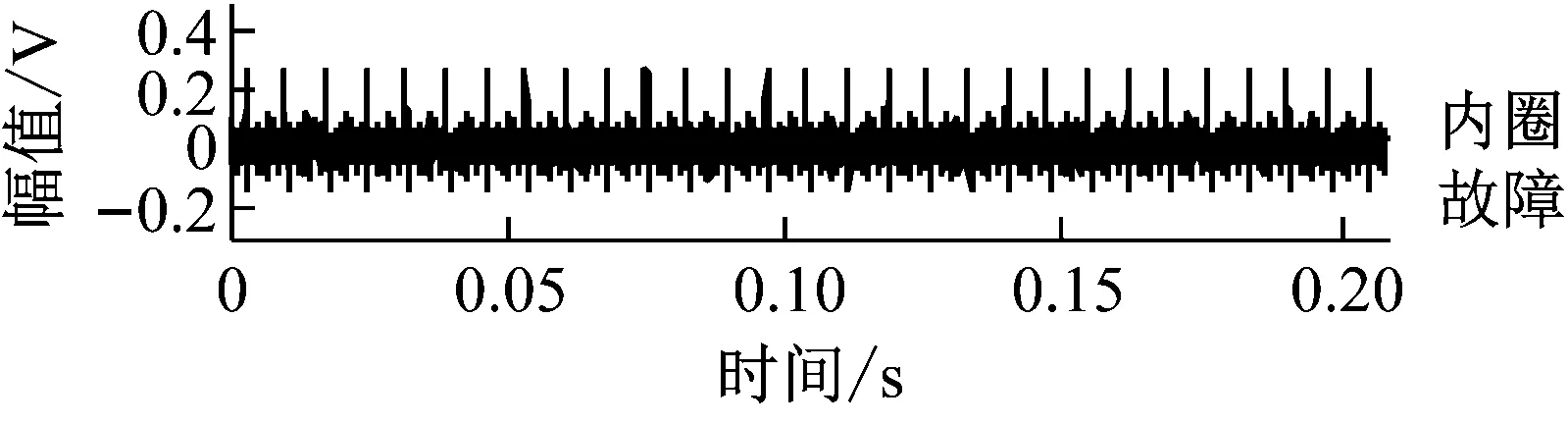
图5 分离出的振源信号时域波形Fig.5 The separated time-domain waveform
5 试验验证
实测信号是利用由ST5000 A滚动轴承振动试验台采集,如图7所示。在试验台中旋转轴的末端安装有KSWL-3806-20编码器和转速表。利用TDGC2-0.5 kVA接触式电压调节器控制交流电动机的转速。最后,使用CA-YD-1181加速度传感器,YE6231数据采集卡和与之匹配的采集软件来同步采集振动信号。
(a) 内圈故障

图7 滚动轴承振动试验台Fig.7 Rolling bearing vibration test bench
滚动轴承振动试验台上装有SKF-6000深沟球轴承。轴承的外圈已被电火花线切割的方式人为损坏。负载是一个偏心飞轮。测得的振动信号主要包括外圈故障和偏心故障源,以及采集过程中混入的环境噪声和电路噪声。其中采样频率fs为24 kHz,轴承的转速为3 600 RPM,轴承的几何参数如表2所示。

表2 滚动轴承结构参数Tab.2 The bearing structure parameter
采集到的振动信号的时域波形如图8所示。从图7可以大致观察到与外圈裂纹故障相对应的冲击分量,但是很难观察到与偏心故障相对应的谐波分量,不能有效确定存在的振源信号及其类型。
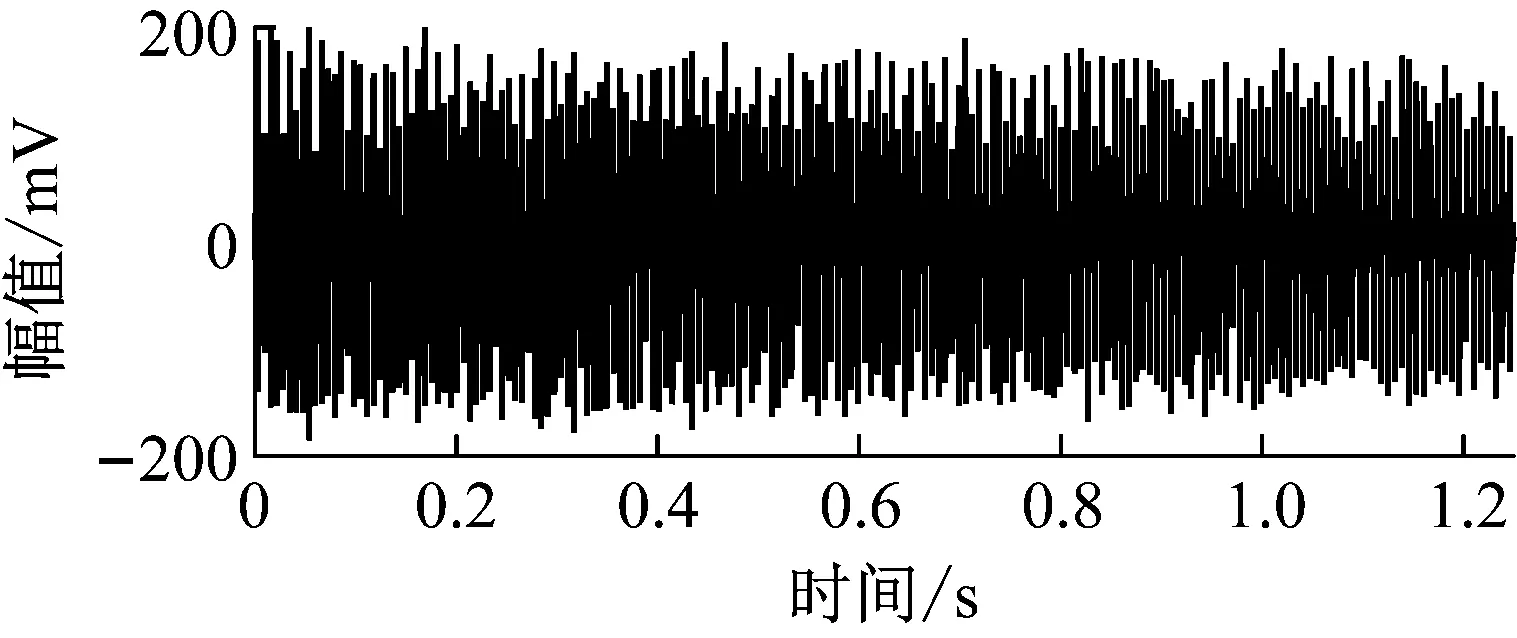
图8 采集的振动信号时域波形Fig.8 The time-domain waveform of the collected vibration signal
然后利用本文提出的方法对振动信号进行分离,并引入对比分离方法,即独立分量分析的盲源分离法(BSS-ICA),分别从时域波形、包络谱、信号比率和分类效果共4个方面对比分离效果。
(1) 时域波形。分离出的振源信号时域波形如图9所示。从图9中可知,本文提出的低秩约束分离方法可以得到清晰的与外圈故障相对应的冲击响应分量和与偏心故障相对应的谐波分量。而BSS-ICA方法可以得到与外圈故障相对应的冲击响应分量,但不能有效分离出与偏心故障相对应的谐波分量。且BSS-ICA方法分离出的故障信号幅值与由实验原始数据的200 mV下降为5 mV,存在较大的失真。
(2) 包络谱。为了分析分离的两个故障振动源的组成成分,分别计算了其包络谱,如图10所示。其中,fo是外圈裂纹的特征频率,fe是偏心故障的特征频率。从图9中可以看出,本文提出的低秩约束分离方法对应的包络谱分别在外圈裂纹的特征频率fo和偏心故障的特征频率fe及其倍频处出现明显峰值。但是BSS-ICA方法对应的包络谱中,外圈故障的包络谱中可以看到fo也可观察到fe,存在混叠现象,且在偏心故障源信号的包络频谱中看不到fe,表明分离效果不理想。
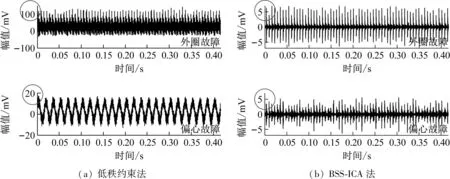
图9 分离后的振源信号时域波形Fig.9 The time-domain waveform of the separated vibration source signal

图10 分离后的外圈和偏心故障包络谱Fig.10 The envelope spectrum of outer ring fault and eccentric fault
(3) 信号比率(SSR)。由于内部和偏心故障的真实振动源信号未知,因此无法通过信噪比(SNR)验证分离效果。文献[28]中提出的实测信号比率(SSR)用于定量评估分离信号的质量。SSR的数学表达式如下:
(18)
式中,PSDi和PSDj分别是信号i功率谱密度。根据式18,计算低秩约束法分离得到的两个故障振动源信号的SSR值分别为5.6和3.2,BBS-ICA方法分离得到的SSR值分别为1.1和0.1。因此,本文的分离方法具有比BBS-ICA更高的SSR值,从量化的角度验证了低秩约束方法的优越性。
(4) 分类效果。为了进一步比较两种方法的分离效果,对分离出的两种故障振源信号进行分类,分类方法采用自组织映射(SOM)无监督聚类方法进行分类。对分离后的两类故障振源信号切分为等大小的样本,测试中每类故障样本数量为200。分类结果如图11所示,类型1代表外圈故障的振动源信号,类型2代表偏心故障的振动源信号。从图11可以看出,通过本文的方法分离的两个故障振动源信号,聚为两类,类间距较大,两类间存在明显的界限。但是BBS-ICA方法分离的两个振源信号的聚类结果存在混叠情况,不能有效区分外圈故障和偏心故障。因此,本文的方法可以获得界限更为清晰的聚类结果。
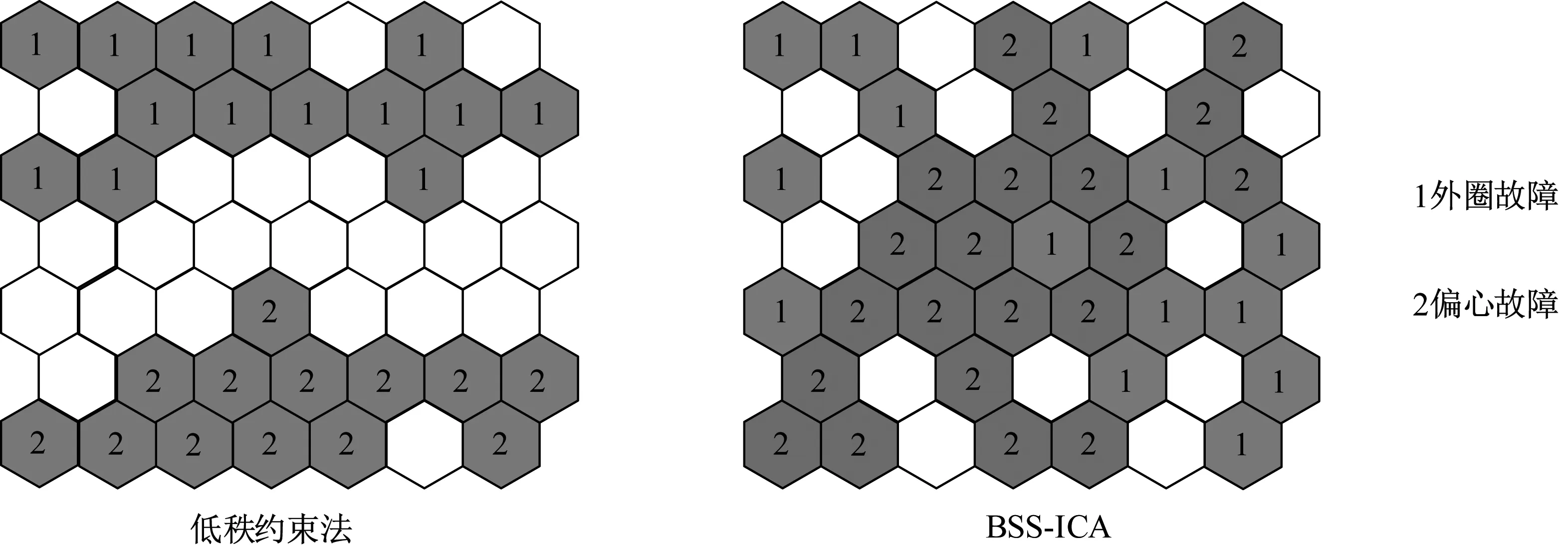
图11 本文方法和BSS-ICA分离后的振源信号聚类效果Fig.11 SOM clustering results of separated vibration source signal by the methods of this paper and BSS-ICA
上述四个方面对比结果总结如表3所示,从表中可以看出,在时域波形、包络谱、信号比率和分类效果共4个方面,低秩约束法的分离效果由优于BSS-ICA方法。
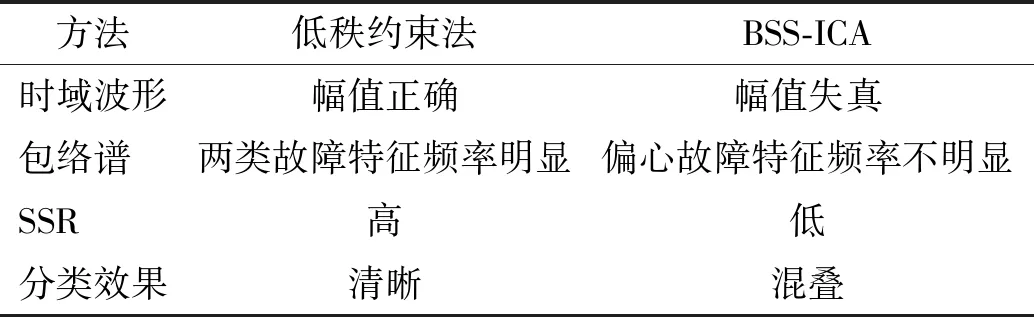
表3 结果对比Tab.3 Comparison of results
6 结 论
为了克服振动源信号特征难以获得的问题,提出了一种低秩约束的振动源信号分离方法。该方法为旋转机械和往复机械故障诊断及健康状态监测提供了基础。在分离过程中,仅需要知道每个待分离源信号的特征频率,避免了预先获取振动源的信号特性的过程。根据研究得到如下结论:
(1) 由旋转或往复机械振动源信号的响应结构体构成的矩阵具有低秩性。其低秩性作为振源信号分离准则。
(2) 根据机械振动信号的实际情况,提出了多低秩噪声模型及其对应的振源信号分离方法。通过仿真和实验验证了其可行性和有效性。与BSS-ICA方法相比,本文研究的方法具有更多的优势。
猜你喜欢
航空学报(2022年8期)2022-09-07
哈尔滨轴承(2022年1期)2022-05-23
组合机床与自动化加工技术(2022年1期)2022-01-27
哈尔滨工程大学学报(2021年10期)2021-11-05
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
船海工程(2019年1期)2019-03-04
电子制作(2017年9期)2017-04-17
雷达学报(2017年6期)2017-03-26
中外管理(2015年3期)2015-03-18