倾转翼无人机返航过渡段气动分析与优化
2022-09-29 05:11王禹程何国毅王琦
科学技术与工程 2022年22期
王禹程, 何国毅, 王琦
(南昌航空大学飞行器工程学院, 南昌 330063)
倾转旋翼机是结合固定翼和直升机特点的新型飞行器,但整体结构复杂,旋翼诱导产生向下的载荷,与其他传统飞行器相比,其拥有更大的飞行包线,可实现多领域应用[1],
倾转旋翼机在向直升机飞行状态进行转换时,旋翼与机翼弦线逐渐接近垂直,此时旋翼诱导下洗流作用于旋翼下侧的机翼从而出现较为严重的气动干扰,产生向下的载荷,使整机升力效率下降。倾转旋翼机过渡段的难点在于保证稳定性和过渡平顺性,如何在倾转过程中保持平稳过渡的前提下提高其升力效率成为倾转旋翼机过渡段的关键问题。与倾转旋翼机不同之处在于,其发动机短舱仓和旋翼倾转的同时,外侧机翼弦线始终与旋翼保持平行,即倾转翼飞行器,可以有效降低升力负方向的载荷,
目前,中外学者均已对倾转旋翼机开展研究, Sugawara等[2]通过Flow3D对倾转旋翼固定翼模式下的单独旋翼和单独机翼分别进行求解,并与两者同时存在的情况进行对比,发现两者存在相互干扰且前进比与阻力成正比。孙凯军等[3]利用运动嵌套网格对倾转旋翼机进行数值模拟,并探究悬停状态下不同襟副翼预制角对其是否存在气动影响。刘泽宇等[4]基于力学模型配平对倾转旋翼机进行稳定性研究,发现改变倾转翼面积可以提高整体稳定性。Li等[5]结合虚拟桨叶模型(virtual blade model,VBM)和真实桨叶模型(real blade model,RBM)方法提出了一种多层运动嵌套网格技术,对旋翼倾转过程进行模拟,该方法可以有效捕捉旋翼动态流场特性。杨海涛等[6]分别使用风洞试验和数值模拟方法对倾转旋翼机进行研究,发现在固定翼前飞模式时,前进比与机翼气动力系数成反比,在过渡模式倾转角小于75°时,前进比与机翼升力系数成正比。窦炳耀等[1]推导倾转旋翼飞机在短距起飞模式下的起飞距离、倾转角、推重比等之间的有效公式,并得出合理的结果。林沐阳等[7]对倾转旋翼机全机流场进行模拟,悬停时出现升力负方向的周期载荷,其约为旋翼拉力的12.19%。刘佳豪等[8]模拟了倾转不同角度下的旋翼和机翼,发现在倾转中期旋翼产生的滑流可以对机翼增升,进一步说明倾转旋翼机过渡段旋翼和机翼间的气动干扰直接影响其气动性能。以上方法均针对倾转旋翼机,由于旋翼诱导产生向下的载荷,从而影响旋翼效率,因此越来越多的学者提出对倾转旋翼机的气动外形进行改变从而提高气动性能。刘士明等[9]通过计算流体力学(computational fluid dynamics,CFD)方法探究旋翼转速对其气动特性的影响,并发现利用嵌套网格可以得到更为精确的数据以此分析旋翼气动特性。
根据倾转旋翼机的气动研究,TILTAERO项目进行了旋翼与外部机翼共同倾转的实验,发现此时可以减弱悬停状态下结构之间的气动干扰。文献[10]提出了一种新概念的倾转翼机。Droan等[11]对倾转翼机过渡段进行实验和数值模拟,进一步证明该构造可以减少机翼所受的向下载荷,相比于倾转旋翼机,倾转翼机可以有效提升整机升力,这对本课题组开展的倾转翼机及其气动研究提供了思路。刘阳[12]通过动量源方法研究了倾转翼机起飞过渡段,发现通过改变瞬时加速度、转速等相关参数,可以实现定高倾转。赵广[13]对倾转旋翼和倾转翼两种结构进行气动分析,结果表明,倾转翼构型可以有效减少机翼向下载荷,提高升力效益。目前对倾转旋翼机尤其是倾转翼机气动研究较少,现有的研究方法虽然可以模拟倾转旋翼机在三种状态下的流场,但在模拟倾转过程时来流是保持不变的,与真实倾转情况存在差异。
基于此,现利用滑移网格技术,基于纳维-斯托克斯方程(Navier-Stokes equations,N-S)的动量源方法,通过调整旋翼转速和倾转角速度,建立一种处于非定常流场下缩短倾转完成时间的倾转翼无人机过渡段数值模拟方法,对倾转翼无人机的返航过渡段进行数值模拟与气动分析。
1 数值模拟方法
1.1 流动控制方程与动量源方法
本文的倾转翼机是在低雷诺数下进行研究的,流场数值模拟的控制方程选用N-S方程,对于三维不可压缩黏性流体,其具体方程为

(1)
式(1)中:ρ为标准大气压下空气的密度;t为时间;u、v、w为流体在t时刻、点(x、y、z)处的速度分量;p为无量纲压强;Fx、Fy、Fz为三个方向下单位质量的彻体力分量;μ为动力黏度。
利用单位向量a、b、c与此方程组相关联,进而求出向量形式的不可压缩黏性流体N-S方程:

(2)
式(2)中:DV为对三个方向速度分量求导;f为N-S方程的源项;V为在x、y、z三个方向上的速度分量。
V=ua+vb+wc
(3)
使用有限体积法进行微分方程的离散,速度和压力耦合迭代选用SIMPLE算法,离散格式采用一阶迎风差分格式,时间导数采用一阶隐式,为保证计算准确性,收敛残差一般设置为1×10-5,采用Spalart-Allmaras(S-A)湍流模型进行数值模拟。
桨叶在流场中受气流的作用力为dF,为通过叶素理论计算桨叶微段上所受气流的力,桨叶经过某点时的气动力可用经过此点的桨叶微段气动力在一个旋转周期内的均值表示,将此气动力转化为不随时间变化的动量源项dFs,为添加入控制方程中动量方程的源项部分。添加入控制方程中动量方程的源项部分。根据牛顿第三定律,则气流对桨叶的作用力为-dF,桨叶的数量为Nb,单位时间内桨叶剖面扫略的角度为Δβ,叶素微元体体积为Vcell。在控制方程中加入由气动力转变为定常的动量源项为

(4)
1.2 计算模型与边界条件
与倾转旋翼机不同的是,倾转翼机的倾转翼弦线始终与旋翼桨盘垂直,如图1所示,其倾转翼和固定翼选择NACA2412翼型进行建模,倾转翼机的具体参数如表1所示;根据具体参数建立的倾转翼无人机三维模型如图2所示。

表1 倾转翼机具体参数

图1 倾转翼机构型及三维模型Fig.1 Tilt-wing mechanism type and three-dimensional model
倾转翼机的模型有着高度对称的特点,采用半旋翼、半机身的模型,从而节约计算资源。旋翼动力盘与倾转加密区、倾转加密区与外流域的重叠交接区域均设为interface,物面边界条件为无滑移假设,由此动力盘和倾转翼在进行倾转时此区域与外流域进行数据交换。外流域设置对称面Symmetry,地面wall,压力出口outlet,其他三个壁面设置成速度入口inlet、open-inlet,与实际情况一致,从而更好地模拟倾转翼无人机的飞行状态。
1.3 滑移网格系统与网格无关性验证
为了准确模拟倾转翼无人机的流场动态分布,建立了一套混合网格,在旋翼桨盘处生成结构网格,而机身、固定翼和倾转翼部分生成非结构网格,把整个流场划分为近壁面区域、倾转加密区域和外流场区域。图2为外流域,其尺寸大小为11L×9L×7L(L为机身长度)。利用滑移网格技术进行数值模拟,不需要依次建立倾转过程中各角度的网格,提高计算效率。
混合网格分为3层,第1层是如图3(a)所示的近壁面区域模型贴体网格,在旋转桨叶等同为的动量作用圆盘处进行局部加密。该部分采用网格增长率为1.2,近壁面设置7层边界层,网格过渡比为0.2。第2层是如图3(b)所示的近机身流场加密网格,在倾转翼表面设置9层边界层,近壁面第一层网格度为0.014 45 mm;图4为倾转加密区网格,在该区域进行倾转过渡状态,动态区域与静态区域通过共同的交接面进行数据传递,交接面的网格需要一一对应。第3层是外流场区域的整体网格,如图5所示。
网格的质量和数量会对计算造成一定程度的影响,因此进行网格无关性验证,监测倾转翼机倾转到5°时不同网格数量的升力,动量源项在对应计算域坐标下与桨叶微段的旋转线速度和诱导速度有关,对源项沿旋翼展向进行积分,即可得到旋翼动量源的代数表达式。发现升力波动的幅度变小,如表2和图6所示,结合同等条件下不同网格数量的计算时长,考虑到计算效率及数据的准确性,最终选用网格数量为320万的网格进行计算。

图2 流域Fig.2 Watershed

图3 机身贴体网格与近机身流场加密网格Fig.3 Body-fitted grid and densified grid of flow field near fuselage
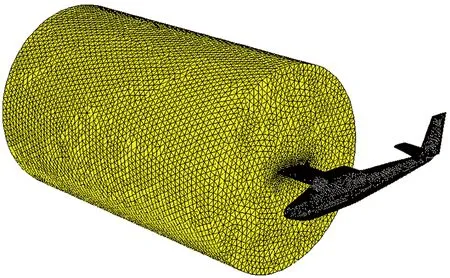
图4 倾转加密区域网格Fig.4 Tilting the densified area grid

图5 整体网格Fig.5 Overall grid

表2 网格数量与计算时长

图6 倾转翼机倾转到5°时不同网格数量升力曲线Fig.6 Lift curve ofdifferent grid numbers when tilting wing aircraft tilts to 5°
2 动量源方法及验证
2.1 单独旋翼算例
动量源方法的准确性需要用算例来验证,对单独旋翼(悬停)流场进行仿真,根据桨叶剖面来流速度和旋翼诱导速度,结合受力得出动量源项,对比文献[14],表3为该旋翼的具体参数。
计算出距离旋翼中心0.215R(R为半径)和0.660R两个位置的动压,并将计算值与实验值进行对比,如图7所示,横坐标为距离与半径的比值,发现随着监测点与旋翼距离的增加,误差相对变大;数值模拟的计算结果具有对称性,符合真实状态的下洗流场特性。且采用该动量源方法数值模拟出的流场压强与试验值的分布趋势大致相同,表明了动量源方法的有效性。

表3 单独旋翼具体参数

图7 旋翼下侧动压分布对比图Fig.7 Comparison of dynamic pressure distribution under therotor
2.2 Georgia-Tech模型算例
选择GT(Georgia-Tech)模型进行算例验证,并将其前飞流场与已有数据进行对比[15],判断动量源方法的准确性。表4为GT模型详细参数。
建立GT模型流场(图8),设立在机身前方4 m、后方8 m、左右各5 m且下方足够远的外流场;其中桨盘建立结构化网格,机身等采用非结构网格,机身周围设立加密区域。
图9(a)为速度流线图,从图9(a)中可以观察到速度方向指向右下方,趋势正确,与直升机真实飞行状态一致,图9(b)为流场压力云图,作用盘对空气来流有一定的加速效果,圆盘上下表面压力存在明显差异,这也与直升机的真实飞行状态相匹配。

表4 GT模型详细参数

图8 GT模型流域及其表面网格Fig.8 GT model watershed and its surface grid

图9 速度矢量图及压力云图Fig.9 Speed vector diagram and pressure cloud diagram
图10为机底线和机顶线的压强系数分布曲线图。
将本文数值模拟的结果同实验数据结合在一起进行比较,分析可知,机底线和机顶线压力系数的数值同实验值有略微的差别,这可能因为建立的模型以及相关网格有偏差所导致的,整体压力系数分布曲线与实验值的整体趋势相同,因此证明本文的方法可行,能够相对准确地对旋翼流场进行数值模拟。
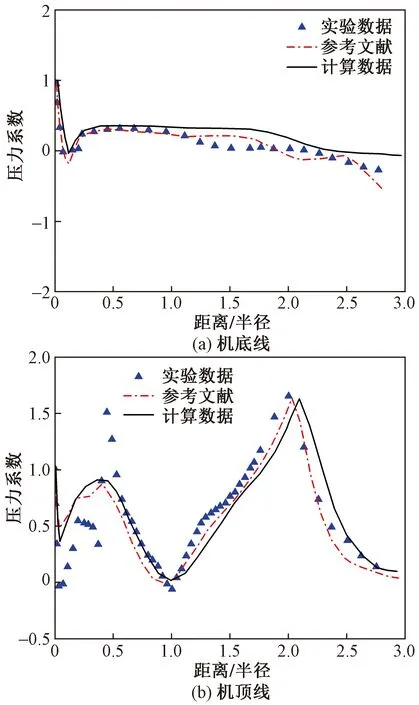
图10 压强系数分布曲线Fig.10 Pressure coefficient distribution curve
3 数值模拟及流场特征分析
3.1 倾转翼机返航过渡段优化
在倾转翼机返航过渡段,飞机的升力、阻力、速度、迎角、倾转角等之间均存在耦合关系,因此处理好各种耦合关系,是保证倾转翼机平稳定高减速的关键。通常情况下倾转翼无人机的倾转翼倾转速度以及旋翼拉力是随时间呈非线性变化的,整个过渡段为非定常的过程,需对参数解耦再采用积分的形式进行计算,从而得出无人机在整个倾转过程的升、阻力曲线,再依次求解其他变量,通过程序实现调整旋翼拉力保持平稳过渡,而第二次计算则采用第一次计算得到的结果作为初始条件,以此往复进行迭代。
由于低速时,尾翼配平能力差,因此,在初步分析中暂不考虑平尾俯仰配平问题,对倾转翼无人机进行受力分析,如图11所示。倾转翼机在过渡段需保持竖直方向上受力平衡,根据约束方程:
Tsin(θ+2)+Fy=G
(5)
可得动力学方程:
Tcos(θ+2)-Fx=ma
(6)
式(6)中:ma为加速度下整机所受合外力。

Fx为阻力;Fy为机翼提供的升力;T为旋翼拉力;G为整机重力; θ为倾转翼的迎角图11 无人机受力图Fig.11 UAV force diagram

图12 前飞速度与时间关系图Fig.12 The relationship between forward flight speed and time graph
由于随着倾转段机翼迎角增加,阻力急剧增大,所以减速度可以更大,且适当减小返航过渡段时间,可减小减速段距离,更加精准地确定着陆点。设角速度为20(°)/s,速度从23 m/s匀速降为0 m/s,则加速度a为-5.34 m/s2,根据初次计算后得到的升阻力系数与加速度得到速度与时间关系调整前如图12(a)所示,从图12(a)中可以看出倾转的开始阶段速度下降过快,加速度过大,在前0.7 s左右倾转翼和固定翼所提供的升力比倾转翼机自身的重力大,倾转翼机无法保证稳定性,与实际要求的平稳过渡状态不符,所以需要对过渡段初期的假设做出调整;倾转段初期阻力增大,前飞速度下降,为了使其正常飞行,若在开始倾转时减缓倾转速度,保证较高的前飞速度下可以使升力增加,以此减少旋翼需要提供的拉力,在整个过程中使机翼部分产生的升力与旋翼提供的拉力之和等于重力,这样可以使速度下降趋势明显平缓。
对过渡段初期调整后进行第二次计算,其中速度和旋翼转速曲线选择5种不同的方法进行拟合;傅里叶(Fourier)曲线拟合、正弦和函数(sum of sine)、多项式函数(Polynomial)曲线拟合,高斯函数(Gaussian)曲线拟合,有理函数(Rational)曲线拟合。在拟合过程中发现利用Gaussian和Rational曲线对于本文研究的内容来说拟合过程过于繁琐,且将这两种方法拟合后的曲线编写入程序中,计算后发现各参数与实际情况偏差过大,考虑计算效率,故不选择这两种方法。Fourier与sum of sine曲线得到的计算结果相差不大,故本文只取Fourier、Polynomial进行具体分析。对比Fourier与Polynomial两种方法拟合出的速度与旋翼转速曲线编写入第二次程序中计算得出的结果,如图13所示,对比发现利用前者得到的升力在过渡段前半部分会出现较大波动,通过对比旋翼转速与时间关系图,如图14所示,在0.2~0.5 s左右旋翼转速先增加再减少;而通过后者得到的受力情况相对稳定,在过渡段初期升力变化平稳,倾转翼机不会出现过大的高度差。
优化后的倾转翼无人机速度与时间关系图如图12(b)所示,整个返航倾转过程用时4.46 s,其中前10°加速度控制在-10 m/s2,假设的加速度与实际计算出的加速度相同;且通过对比,发现利用Polynomial拟合曲线可以使倾转翼无人机在倾转完成时间尽量缩短的条件下保证定高倾转及平稳过渡,拥有更好的飞行状态,从而优化倾转翼机返航过渡段的整个过程。

图13 倾转翼机受力对比图Fig.13 Force comparison chart of tilt-wing aircraft

图14 旋翼转速与时间关系对比图Fig.14 Comparison chart of the relationship between rotor speed and time
3.2 倾转翼机缩短时间下返航段气动特性分析
选择利用Polynomial方法得到的结果进行倾转翼无人机优化后的气动分析。由图13可知,在8°左右时整机升力约等于其自身重力14.7 N,因为整个返航过渡段为减速运动,整个过程中倾转翼机的阻力应大于旋翼提供的拉力在水平方向的分量,所以旋翼所提供的拉力在8°左右时会减小。
在过渡段初期前飞速度变化不大,倾转翼迎角为非失速特性迎角,此时倾转翼边界层为层流边界层,其升力系数与迎角变化成正比,倾转翼机在过渡段初期旋翼拉力和倾转翼提供的升力之和比倾转翼机自身的重力大,所以在开始阶段升力有上升趋势;倾转翼机在x=0.55处截面倾转翼迎角流场图如图15所示,在倾转翼倾转到17°时倾转翼上表面开始出现气流分离,而随着倾转翼倾转,迎角变大并转变为失速特性迎角,倾转翼边界层由层流转捩为湍流,其升力系数与迎角变化成反比;从图15中可以看出在倾转翼上方的气流分离点由倾转翼后端向前端推进,整个流场气动特性更为繁琐,其倾转翼迎风面积增大,阻力做功增加,故需要旋翼提供更大的拉力来保持竖直方向上的合力为零;所以旋翼拉力在17°时会有变化的趋势,且整机升力在17°之后持续下降。

图15 x=0.55处倾转翼攻角流场图Fig.15 Flow field diagram of the angle of attack of the tilting wing at x=0.55
图16为无人机过渡段流场变化图,忽略旋翼周围的流场,模拟旋翼对流场的作用。整个过程倾转翼迎角从2°倾转至88°,取倾转过程中3°、43°、53°、88°来观察流场的变化,发现倾转初期旋翼下洗流对整体流场的影响不大,当倾转翼倾转到43°时,旋翼下洗流对流场已经产生影响,到53°以及之后的角度更为明显,此时无人机的前飞速度为8.1 m/s,旋翼的下洗流对来流影响较大,可以改变来流方向,符合倾转翼无人机真实飞行情况。

图16 无人机过渡段流场变化图Fig.16 Flow field change diagram of UAV transition section
4 结论
(1)在过渡段初期迎角为非失速特性迎角,倾转翼边界层为层流边界层,其升力系数与迎角变化成正比,在本文设置的计算条件下,倾转翼倾转到17°时迎角转变为失速特性迎角,倾转翼边界层由层流边界层转捩为湍流边界层,其升力系数与迎角变化成反比。
(2)在倾转初期减缓倾转速度,从而使倾转时间增加,为了使其定高倾转,整机纵向合力应该保持平衡。通过调整旋翼转速、倾转角速度去控制整个倾转过程完成的时间,利用拟合曲线可以在尽可能高效倾转的过程中保持倾转翼无人机返航过渡段的定高倾转以及稳定性,使倾转翼飞机的返航过渡段受力曲线更加光滑并达到预期效果。
计算结果表明,本文使用的方法可以使倾转翼无人机在倾转阶段拥有更好的飞行状态,降低了无人机的控制难度,在真实情况下保持定高倾转及其稳定性具有重要意义。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
西部论丛(2020年2期)2020-10-21
科学Fans(2019年4期)2019-04-30
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
私人飞机(2016年6期)2016-12-27
三联生活周刊(2016年50期)2016-12-15
少年科学(2014年7期)2014-08-18