
焊接机器人TCP全自动标定方法研究
2022-09-30 05:29陈锋
长春师范大学学报 2022年8期
陈 锋
(安徽职业技术学院信息工程学院,安徽 合肥 230000)
0 引言
随着我国工业自动化水平的快速发展,人工成本不断提升,机器人在制造业各领域快速普及和发展。通过在机器人末端安装各种不同工具,如喷枪、抓手等,完成各种作业任务。焊枪机器人就是通过在机器人末端法兰安装焊枪完成机械的焊接作业,但是工具中心点(TCP)相对末端位置的偏移量大多是未知的,即使在使用前对焊枪工具中心点进行准确标定,其准确度也会随着焊枪的长时间使用或者工具的调整而变得不准确。未经过标定或者不准确的标定都会直接影响机器人焊接的轨迹精度,因此,如何快速准确地对工具中心点进行标定,已经成为焊接机器人领域的一个重要问题。本文将针对工具坐标原点的TCP自动化标定展开讨论。目前,工具中心点(TCP)标定方法有两大类:一种是外部基准法,其需要在机器人上安装精确测量装置,例如球杆仪、坐标测量机、激光跟踪仪、DYNACAL机器人标定仪器等设备;另一种是多点标定法,通过控制机器人以不同的姿态无限逼近固定参考点,并记录机器人位置和姿态,由机器人系统根据内部算法计算出工具坐标系的TCP值,其中以四点法和六点法居多。熊烁等[1]研究了机器人工具坐标系的接触式标定的算法,采用最小二乘法进行拟合,并且在工业机器人上进行了相关实验。周星等[2]研究了六关节工业机器人TCP 标定模型的算法优化。
利用外部基准法进行标定,标定精度高,但现场施工难度较大,在工业现场使用不便。仪器造价昂贵,标定成本较高。但在实际操作过程中,多点标定方法需要人工用肉眼实现点-点的精确重合操作,如对准不准确,容易造成较大误差,尤其是当四点都分布在参考点一侧时,因分布位置的集中限制了机器人能做姿态的幅度,导致误差增大和标定失败,因此,多点标定方法效率较低,无法实现自动标定。
本文结合TCP标定两类方法的优缺点,提出了一种以四点法为基础、基于机器视觉的全自动标定方法,该方法需要以两台相机作为辅助工具。利用图像处理,得到图像像素和空间距离的比例关系,计算出焊枪到标定点位的位移数据,进而实现对焊枪运动轨迹的控制,根据得到的点位信息,应用最小二乘法计算出TCP的标定坐标值。
1 标定过程及原理
1.1 视觉测量原理及误差分析
本文中视觉测量过程如图1所示。
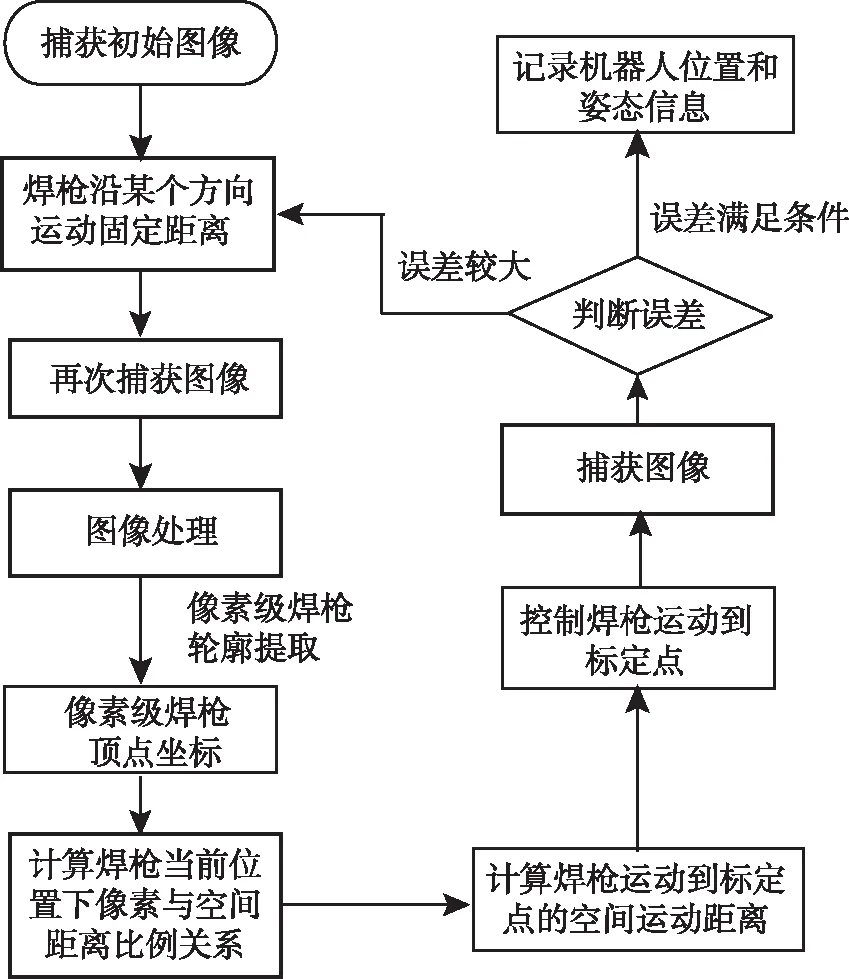
图1 视觉测量流程图
通过两台高精度相机对焊枪进行图像捕获,得到机器人焊枪运动固定距离前后的对比图像。通过图像分析预处理,主要包括图像灰度和二值化以及滤波等,得到机器人焊枪的轮廓图形[3]。经过相机捕获的图像一般为RGB三通道图像,为方便后期处理,需要对图像进行灰度化处理,这里采用加权平均法,灰度化计算公式为
H(i,j)=0.299×R(i,j)+0.578×G(i,j)+0.114×B(i,j),
(1)
其中,H(i,j)为坐标(i,j)下的灰度像素值;R(i,j),G(i,j),B(i,j)分别为三个通道的像素值。
图像的二值化处理是将经过灰度处理后的像素根据阈值设置为0或者255。
(2)
其中,G为图像单个像素点的灰度像素值,t为设置的阈值。
为了去除因灰尘颗粒等引起的图像干扰,提高焊枪的轮廓识别,降低提取偏差,需要对图像进行滤波处理。本文使用中值滤波算法对捕获的图像进行处理,其主要原理是统计周围像素值,取中值代替当前像素值。将处理后的图像焊丝部分轮廓点进行线性拟合,进一步获取焊枪底部像素坐标。通过焊枪运动前后两次焊丝位置的像素差,可以得到焊枪当前位置像素与空间位置的比例关系,进而计算出焊枪到达标定点像素坐标的像素距离以及空间距离,从而控制机器人运动到标定点位置。焊枪在标定点位停止后,再次采集图像,计算焊枪底部像素点距离标定点的距离,得到运动误差Δd。
(3)
其中,xi,yi,zi为焊枪底部当前像素点坐标;x0,y0,z0为标定点像素坐标;ki为当前点位像素与空间距离比例关系。
由式(3)得到通过视觉计算控制焊枪运动后的空间位置与实际标定点的误差,当误差较大时,再次运行上述操作,可以将距离误差降低。此时,记录该点位下机器人的姿态信息和位置信息。
通识教育注重培养学生的优良品质和终身学习能力,注重培养学生完整的知识、人格及远见卓识,在教育中备受关注。
1.2 四点法标定原理

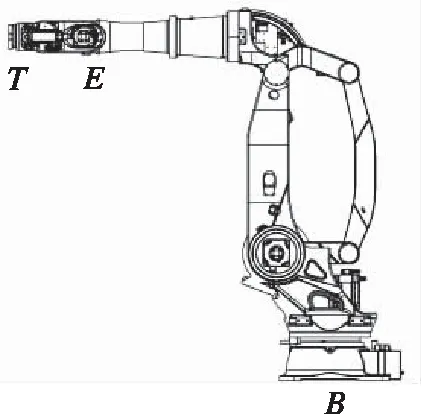
图2 六轴机器人结构图
(4)
按照四点法要求[4],如图3所示,机器人焊枪从四个任意不同的方向靠近同一个标定点,记录四个位置到达标定点后的点位矩阵Ni。
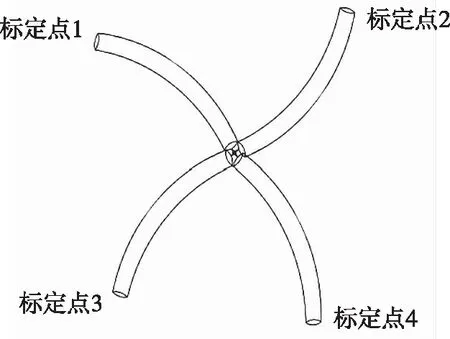
图3 四点法标定示意图
(5)

对于得到的四个点位,有
(6)
(7)
(8)
将式(6)(7)(8)带入式(4),可得到
(9)
由式(9)可以得到
(10)
(11)
根据欧拉角和姿态矩阵之间的变换关系[5],可以得到四个点位对应的姿态矩阵:
(12)
(13)
1.3 TCP坐标求解方法
Rx=P,
(14)
式(14)中,方程没有精确解,将求方程的精确解转换为求方程的最小值,即实测值与计算值之间误差最小问题。我们知道,应用最小二乘法通过最小化误差的平方获取匹配方程的最优解,利用最小二乘法可以快速求解方程,使求得的数据与实际数据之间误差的平方和最小。
S(x)=‖Rx-P‖2.
2 实验及结果分析
以埃夫特公司的六轴工业机器人为运动主体,进行TCP 标定,如图4所示。为了验证视觉测量以及标定算法的正确性。机器视觉控制机器人焊枪运动到标定点,获取四个不同姿态下的机器人坐标,使用标定算法进行计算,将结果与机器人示教器中计算的TCP结果进行对比分析。

图4 六轴工业焊接机器人
2.1 视觉测量实验
搭建焊接机器人TCP标定平台如图5所示。使用两台相机从不同维度进行图像采集,其中,右相机采集机器人x和z平面像素坐标,左相机采集y平面像素坐标。为了提高图像像素处理精度,在相机背面增加了背板光源。相机采集的原始图片和经过图像处理后的图片对比如图6所示,经过灰度、二值化和滤波处理图像,可以得到焊枪及焊丝的边缘轮廓,通过对焊丝部分轮廓的线性拟合,可以得到焊枪底部的像素坐标。

图5 相机进行图像采集装置

(a)相机原始图 (b)提取焊枪轮廓图6 相机原始图和处理后的图
让焊枪沿垂直方向平移固定距离S,本实验取5 mm,对比平移前后像素点之差,可以得到该位置下像素与空间距离的比例关系,进而得到距离标定点的空间距离。
两台相机与机器人坐标的映射关系:右相机水平方向对应机器人X轴运动,右相机垂直方向对应机器人Z轴运动,左相机水平方向对应机器人Y轴运动。
从表1可以看出,利用视觉测量对机器人焊枪点坐标提取和位置距离计算,能够有效控制焊枪到达标定点位,且误差较小,满足工业精度要求。特别地,当焊枪初始距离标定点位较远时,因距离较大,像素点误差可能较大,此时进行两次操作,即可将误差控制在3个像素约0.3 mm以内。

表1 视觉测量像素坐标、距离及运动关系测算
2.2 TCP标定计算
通过视觉测量控制机器人焊枪到达标定点位,记录此时工具坐标系末端点(TCP点)相对于法兰中心的位置偏移量。变换机器人姿态,依次得到四个点位信息,如表2所示。
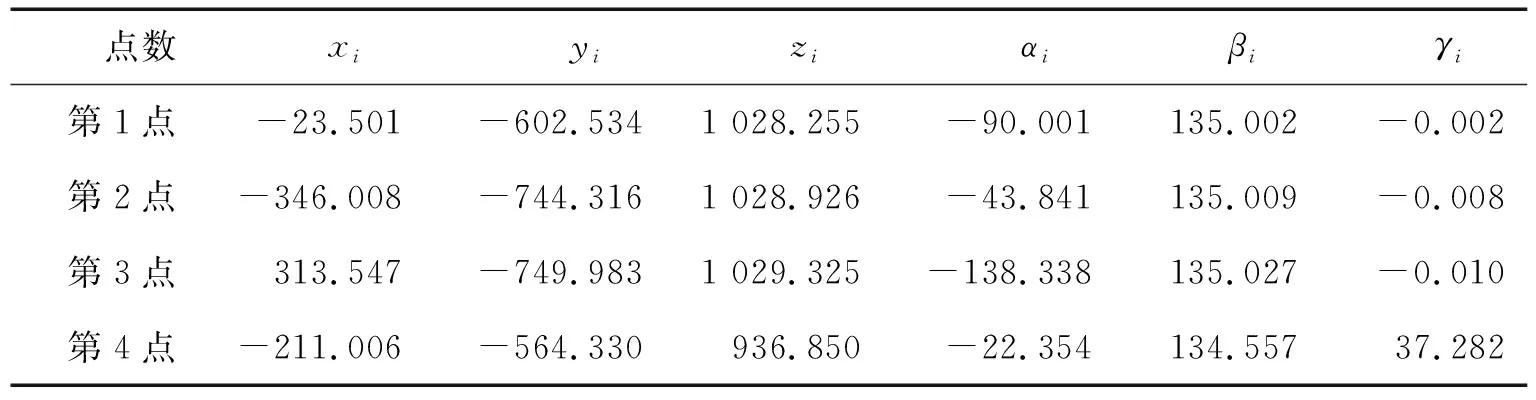
表2 不同姿态下工具坐标系末端点(TCP点)相对于法兰中心的位置偏移量
使用标定算法,对表2记录的点位信息与机器人示教器计算结果进行对比,如表3所示。
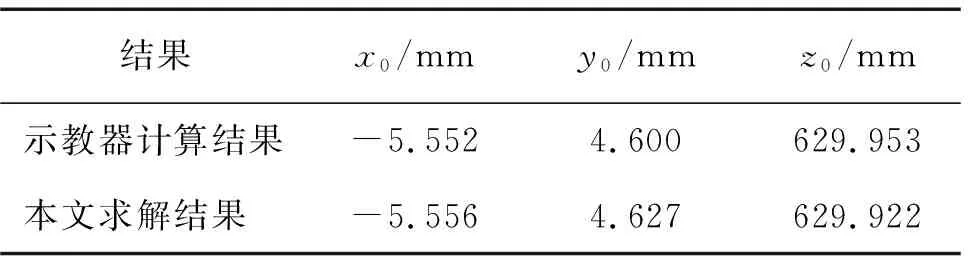
表3 本文TCP计算结果与示教器结果的对比
3 结语
综上所述,本文提出了一种基于视觉测量和四点法的TCP自动标定方法,通过获取测量点位信息,经计算得到TCP点位,将本文求解结果与商用机器人示教法计算结果进行对比,结果基本一致。实验表明,使用四点法标定,焊接机器人逼近标定点的过程,利用视觉测量进行坐标和位移计算,精度较高。对标记的点位应用最小二乘法,计算得到的TCP结果与商用机器人计算结果吻合。可见,本文方法操作简单,通用性强,计算快速准确,实现了焊接机器人的自动化标定。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
电焊机(2020年3期)2020-09-10
科海故事博览·中旬刊(2020年4期)2020-06-15
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
新课程·中旬(2017年7期)2017-08-13
