基于事故数据的智能汽车安全测试场景研究
2022-10-12 05:58黄妙华王思楚
机械设计与制造 2022年10期
黄妙华,王思楚
(1.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.汽车零部件技术湖北省协同创新中心,湖北 武汉 430070;3.武汉理工大学汽车工程学院,湖北 武汉 430070)
1 引言
随着计算机技术的发展,智能汽车自动驾驶技术成为近年汽车厂家研究的重点。由于交通事故给人们造成了许多生命和财产损失,安全问题是无人驾驶技术发展的要点之一。为了评价自动驾驶系统的功能,各国政府和汽车企业正在加紧研究和开发智能汽车场地测试方法[1]。欧盟和我国的汽车检测机构都发布过关于汽车自动紧急制动系统的车辆追尾和行人碰撞测试条例,我国智能网联汽车产业创新联盟也于2018年发布了智能网联汽车自动驾驶功能测试规程[2]。目前大多数测试条例和规程对测试道路的要求为平坦、干燥的沥青或混凝土路面,对自然环境的要求为无降雨、降雪、冰雹等恶劣天气,但包含路面状况、天气在内的道路条件和自然环境条件已经成为影响汽车安全的重要因素。文献[3]分析了希腊59316起事故进行分析,发现良好的天气条件和夜间事故会增加事故的严重性。
文献[4]研究了道路条件对车辆事故严重性的影响,发现在当道路条件不清、结冰和下雪天气条件下,车祸的严重性显著增加。现阶段大多数测试标准仅考虑车辆与行人的速度与位置,缺乏对测试场景环境的针对性规定,缺乏对容易引起事故的交通条件和环境因素的考虑。要考虑测试标准中的交通条件和环境因素的常用方法是从真实事故数据中发现规律。文献[5]收集了国内六个城市车与两轮车相撞的事故数据,设计了考虑到照明情况、道路特征、汽车运动状态和视野的自动紧急制动系统两轮车测试场景;文献[1]考虑到了照明条件、道路特征、汽车运动状态和视野的,通过聚类方法建立了危险场景库;文献[6]针对与行人相关的交通事故,建立了考虑到光线条件、行人身高、行人状态、视野和天气的自动紧急制动系统测试场景。目前国内外研究主要集中在自动紧急制动系统,缺少对完整自动驾驶功能的测试场景研究,并且测试场景的设计较为简单,缺少对路面条件,天气条件以及各种位于道路中间的障碍物的考虑。
这里利用汽车事故数据,分析交通环境和自然环境中与交通事故严重性关系密切的因素,并提取其中典型条件,结合我国现有的汽车自动驾驶功能测试规程,建立考虑到环境对车辆事故严重性影响的汽车自动驾驶功能测试场景,为智能网联汽车自动驾驶功能的检测提供参考。
2 数据来源
这里所使用得数据为英国交通部所记录并公开的2017年英国交通事故情况、涉及的车辆类型和相应伤亡情况的详细数据。数据只包含了发生在公共道路上的人身伤害事故,事故发生后由警方进行记录并汇总。数据不包括没有人员伤亡或发生在私人道路和私人停车场的事故。
该数据数据项较多,事故现场交通条件和自然环境的记录较为详细和完整,对我国汽车主动安全系统测试场景的设计具有参考借鉴意义。从中选取一部分与交通条件和自然环境有关的数据,包含项目名称,如表1所示。
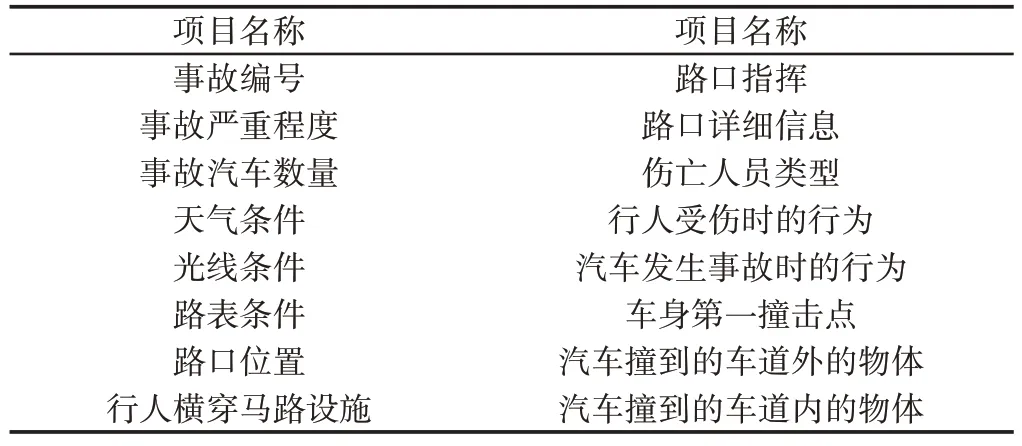
表1 事故记录项目Tab.1 Accident Recording Items
记录中的事故共129982起,其中轿车事故共97654起。轿车事故中致命的事故为1084起,占事故总数的1.11%,严重的事故为15253 起,占比15.62%,轻微的事故为81317 起,占比83.27%。
3 交通事故关联规则的提取
3.1 关联规则挖掘算法的改进
3.1.1 Apriori算法介绍
Apriori是常见的用于挖掘数据关联规则的算法,用于找出数据值中频繁出现的数据集合,从这些找出的数据集合中我们能直观地获取有用的信息[7]。该算法中涉及到频繁项集,支持度(support),置信度(confidence),提升度(lift)4个概念。
(1)频繁项集:指经常同时出现的数据项的集合,包含K个项的频繁项集合就称为频繁K项集。
(2)支持度:指事件发生的概率,公式如下:

式中:P(XY)—XY同时发生的概率;count(X,Y)—X和Y同时出现的次数;count(All)—所有事件的总数。
(3)置信度:指在满足一个事件发生的前提下另一个事件发生的概率,公式如下:

(4)提升度:指在发生一件事的条件下,同时发生另一件事的概率,与另一件事发生的概率之比。当提升仍度大于1的时候,两件事的关联规则是正相关,当提升度小于1时,两件事的关联规则为负相关,公式如下:

Apriori算法的步骤如下[8]:
(1)扫描数据库,对每个数据项进行计数,得出1候选项集,这时K=1。
(2)由定义的最小支持度从K候选项集中筛选得出频繁K项集。
(3)由K频繁项集进行连接,得出K+1 候选项集,扫描数据库,根据设定的最小支持度由K+1 候选项集进行剪枝得出频繁K+1项集。
(4)重复(2)(3)步骤直到K+1频繁项集为空时算法结束。
3.1.2 Apriori算法的改进
使用Apriori算法提取轿车交通事故的关联规则存在不足之处。在实际行车中,大部分时间的天气都是晴天,路面大部分时间处于干燥状态,所以在这类常见条件下发生的事故数量也较多,由“晴天无大风”、“路面干燥”等项组合成的频繁项集支持度也就较大,表示这类常见条件的项也就较容易被关联算法提取,从而在频繁项集中反复出现,而另一些表示较不频繁条件的项则难以在频繁项集中出现。因此仅使用Apriori算法进行关联规则挖掘容易得出错误的结论,例如由关联规则挖掘容易得到白色汽车更容易发生事故的结论[9],与以往的科学研究结论[10]相反。
现阶段针对这一问题的研究较少,文献[11]提出采用独立性检验的方法,分析项之间的独立性从而判断事务之间是否存在关联,然后去除不存在关联的事务从而一定程度上排除了这种误导性的关联规则。但是该方法没有解决常见条件的项在关联规则中反复出现这一问题。
针对上述问题提出改进的Apriori算法。由于事故的严重性被分为三个程度:致命的、严重的以及轻微的,针对车辆事故场景提出对严重交通事故发生的提升度这一指标。关联规则对致命和严重交通事故发生的提升度即在该关联规则在事务集中出现的前提下,严重或致命的事故出现的概率与没有这个前提下严重或致命事故出现的概率的比值。将事故的严重程度这一属性加入到事务集的事务中,对事故数据进行频繁项集的挖掘,在结果中选取包含事故严重程度为致命或严重的频繁项集。然后计算除表示严重程度以外的其它项组成的项集对该严重程度的交通事故发生的提升度。然后按以下规则对具有包含关系的频繁项集进行比较,去掉对致命和严重交通事故影响较小的项。设{a,b}项集对严重程度为致命和严重的事故的提升度为lift1而{a,b,c}项集对严重程度为致命和严重的事故的提升度为lift2,若{a,b}⊂{a,b,c}且lift1大于lift2,则视c为与严重程度关系不大的项,将{a,b,c}关联规则从频繁项集中删去,只保留{a,b}关联规则。该方法能对关联规则进行筛除,去掉对致命和严重交通事故影响较小的项。改进后算法的主要步骤如下:
(1)选取合适的支持度,使用Apriori 算法产生频繁项集。
(2)计算频繁项集中每一项对严重交通事故发生的提升度,选取合适的提升度阈值,去除提升度在阈值以下的关联规则。
(3)对具有包含关系的频繁项集进行比较,去掉对致命和严重交通事故影响较小的项。
(4)输出最后得出的频繁项集。
3.2 关联规则的提取
容易引起不同类型车辆事故的因素不相同,因此典型事故场景也需要根据不同车型来分别构建,这里只对轿车事故数据进行研究。首先从中筛选出轿车的事故数据,然后将筛选后的车辆事故分为三类,第一类为车与车相撞的事故,第二类为车与其它物体相撞的事故,第三类为车仅与行人相撞的事故。
这三类事故的发生原因和影响因素各不相同,因此需要分开三类分别分析。对每一类事故分别使用改进后的Apriori算法进行关联规则挖掘。
经过调试,分别取支持度为0.001,0.01,0.003,使用Apriori算法对频繁项集进行挖掘。经过挖掘后的第一类事故关联规则,如表2所示。第二类事故关联规则,如表3所示。第三类事故关联规则,如表4所示。
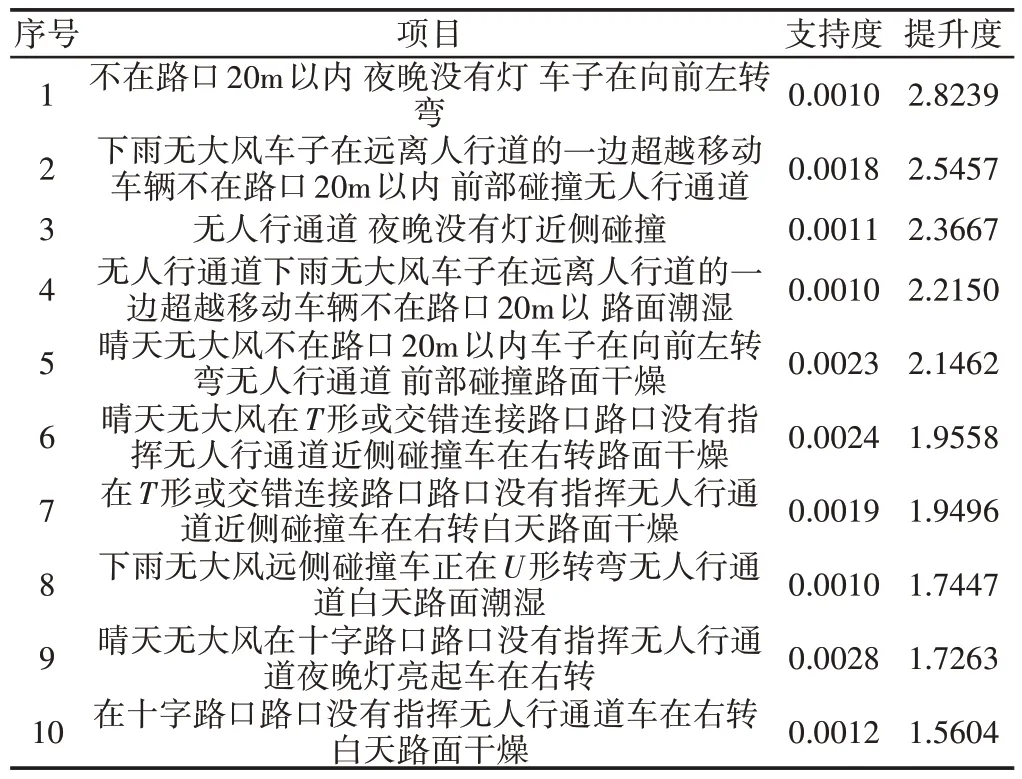
表2 第一类事故部分关联规则Tab.2 Part of Association Rules for Class I Accidents
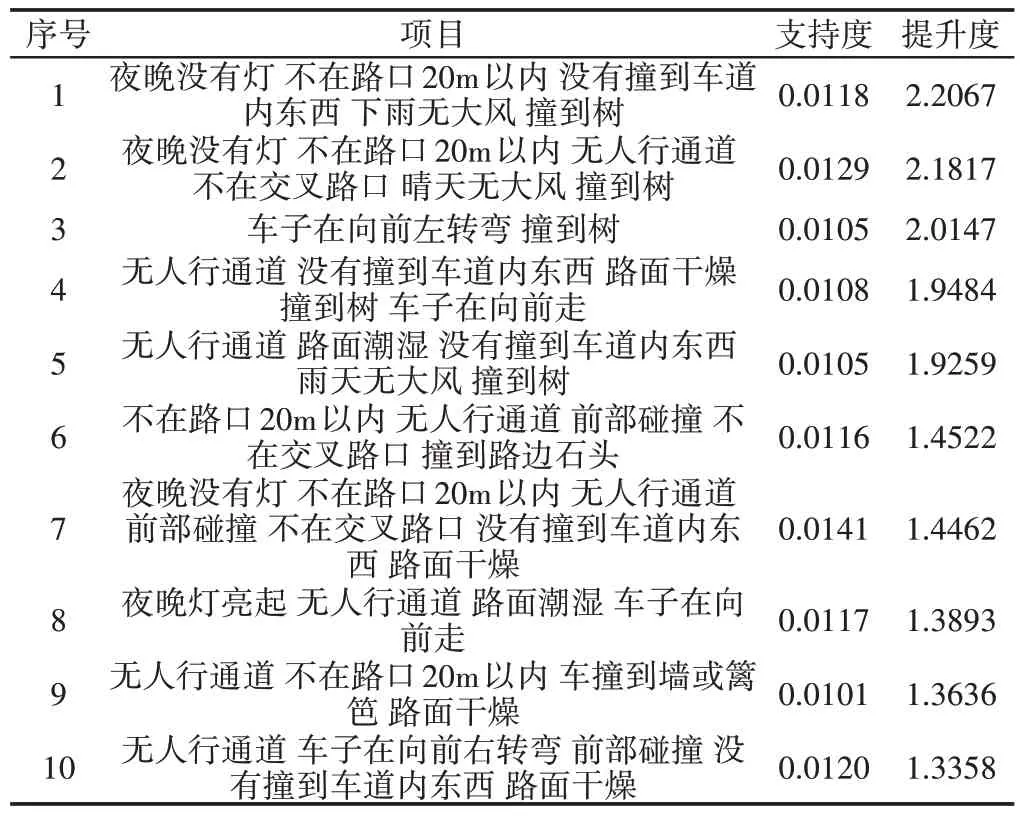
表3 第二类事故部分关联规则Tab.3 Part of Association Rules for Class II Accidents

表4 第三类事故部分关联规则Tab.4 Part of Association Rules for Class III Accidents
4 测试场景的构建
有相关规程将智能汽车安全测试分为14项[2],其中与道路条件有关的有11项,包括交通信号灯识别及响应、前方车辆行驶状态识别及响应、障碍物识别及响应、行人和非机动车识别及避让、跟车行驶、靠路边停车、超车、并道、交叉路口通行、环形路口通行。测试场景中的场景一般包括道路环境要素、其他交通参与者、车辆驾驶任务等因素[12]。构建测试场景时,在原规程标准上将测试项目与关联规则结合。
在表2~表4中,出现了许多较少见的元素,说明挖掘关联规则时兼顾到了常见的项和较不常见但对事故影响较大的项。从中可以看出:(1)不好的光线条件对车辆事故严重程度的影响较大,在容易发生车与车碰撞的测试时需要考虑无灯的夜晚,而在容易发生车行人碰撞的测试时应考虑有灯的夜晚;(2)车在路面潮湿的条件下进行超车容易发生追尾类型的严重交通事故,车在没有指挥的路口转弯容易发生侧面碰撞的事故,且与恶劣天气关系不大,而变道或超车时发生的车辆相撞的严重事故在雨天更容易发生,因此与追尾事故相关的测试需要设置路面潮湿的场景,而超车和变道的测试需要设置下雨天气以及路面潮湿的场景;(3)没有路灯的夜晚、下雨的天气和潮湿的地面是发生车辆与路面其他物体碰撞的主要原因,且它们之间关联较大,常在关联规则中一同出现,因此在障碍物识别响应测试时需要考虑这些因素;(4)容易与车辆相撞的物体包括树,路边的石头,栅栏等,车辆撞到树较容易发生严重的交通事故,并且主要发生在远离路口的路段,在障碍物识别响应测试时需要设置常见的行道树作为障碍物;(5)导致人与车辆相撞的严重事故的主要原因是行人在非人行横道处穿过马路,且从远离驾驶员的道路一侧穿到靠近驾驶员的道路一侧,以及在夜晚有灯的光线条件,人与车辆相撞的严重事故与恶劣天气和潮湿路面的关系不大,因此与行人有关的测试场景需要考虑夜晚有灯的光线条件,而为降低成本不需要设置有雨天气和潮湿路面的场景条件。
结合测试项目与以上分析,构建测试场景,如表5所示。
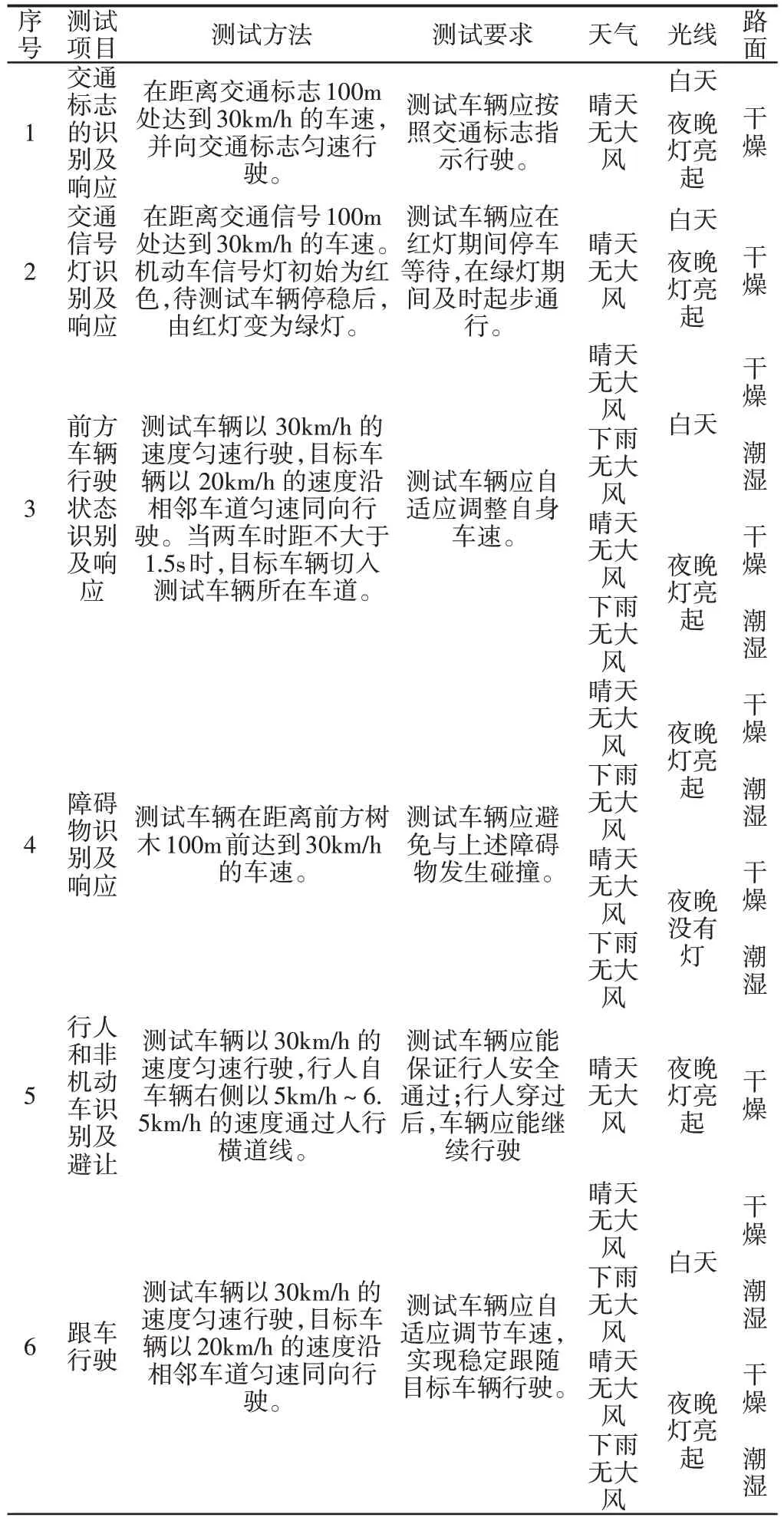
表5 智能汽车安全测试场景Tab.5 Intelligent Vehicle Safety Test Scenario
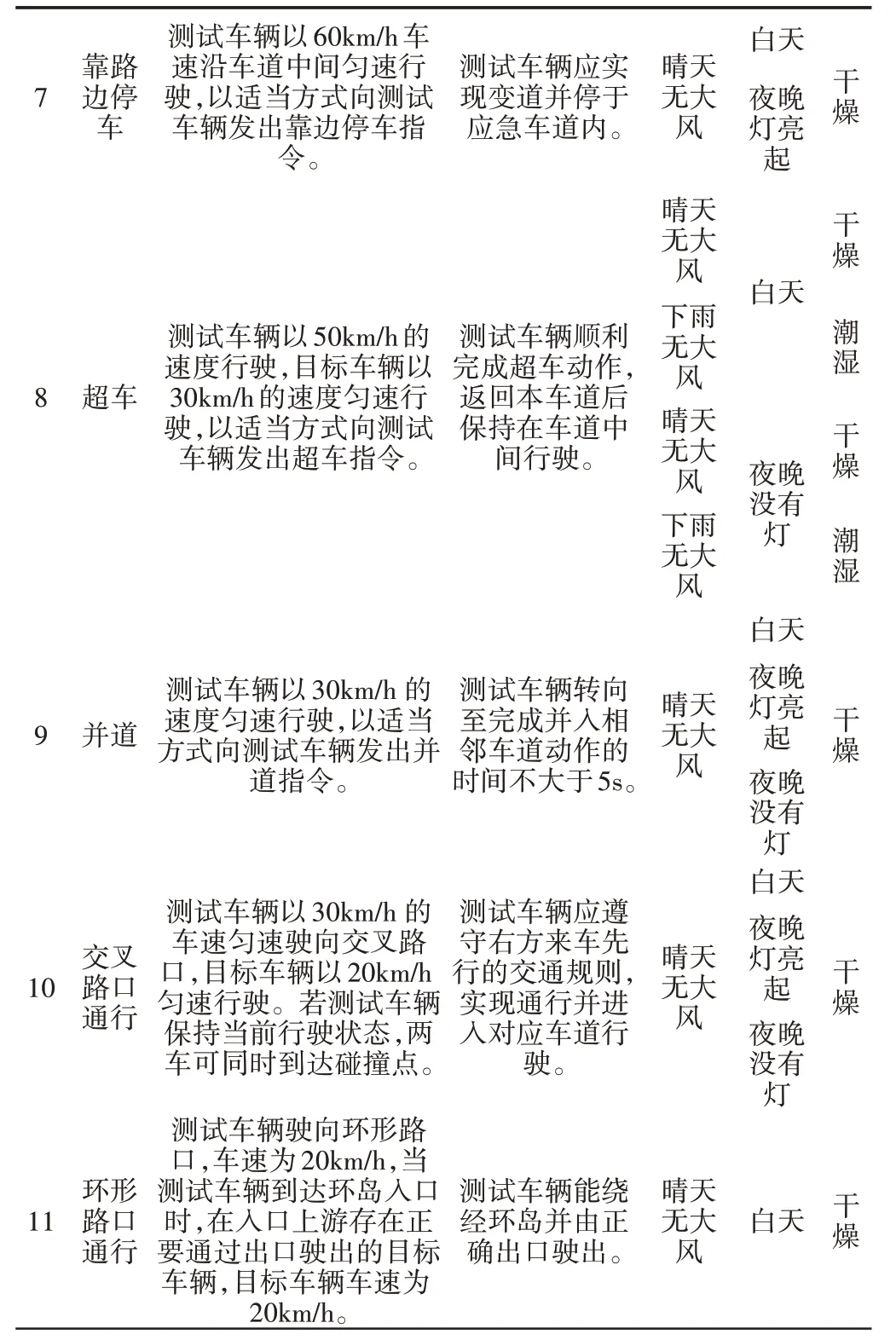
表5 智能汽车安全测试场景(续表)Tab.5 Intelligent Vehicle Safety Test Scenario
其中部分测试场景示意图,如图1所示。
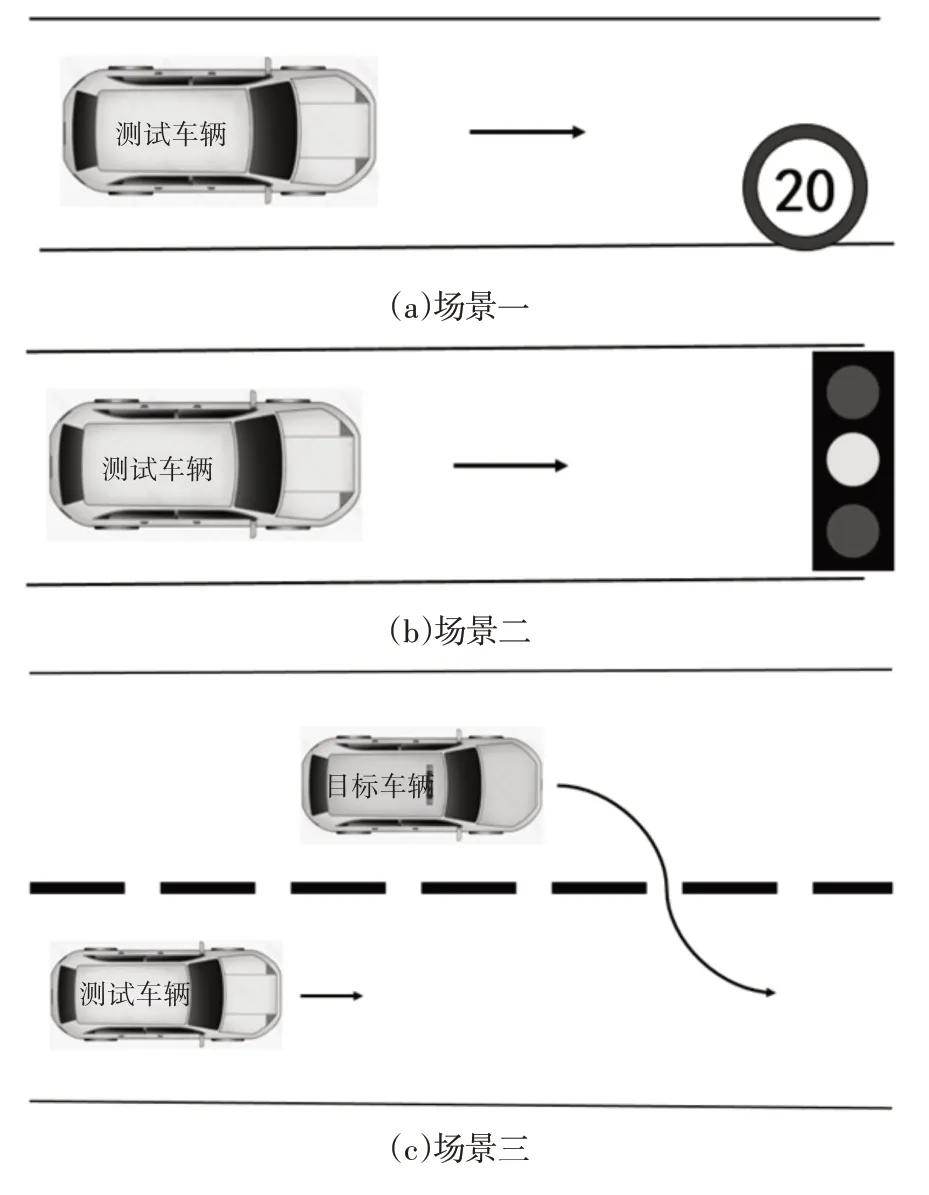
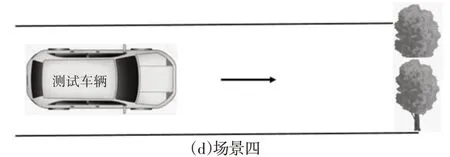
图1 部分智能汽车安全测试场景示意图Fig.1 Intelligent Vehicle Safety Test Scenario
5 结论
这里对交通事故数据进行统计学分析、筛选、分类,将事故分为车与车相撞的事故,车与其它物体相撞的事故,车仅与行人相撞的事故利用改进Apriori算法进行关联规则的提取,在提取过程中不仅考虑了常见事件,还考虑了不常见但对交通事故有较大影响的事件,提出了以严重事故发生为目标的提升度来提取关联规则。最后根据提取出的关联规则结合已有的标准建立了新的智能汽车安全测试场景,对于开发和完善我国智能汽车的场景测试方法具有重要意义。在未来的研究中可考虑更详细的交通条件和环境因素,并针对不同类型车辆的事故分别分析,完善测试场景的构建,为智能汽车设计和测试提供参考。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
计算机应用与软件(2022年7期)2022-08-10
哈尔滨理工大学学报(2021年4期)2021-10-07
计算机应用(2021年8期)2021-09-09
小雪花·成长指南(2020年2期)2020-10-12
当代陕西(2019年15期)2019-09-02
劳动保护(2018年5期)2018-06-05
学苑创造·A版(2018年11期)2018-02-01
读者(2017年5期)2017-02-15
棋艺(2014年7期)2014-09-09