
基于坐标反推法的偏心轮轴升程测量
2022-10-20 09:03杨武伟石照耀
计量学报 2022年9期
杨武伟, 石照耀, 林 虎
(1.北京工业大学材料与制造学部北京市精密测控技术与仪器工程技术研究中心,北京100124;2.中国计量科学研究院,北京100029)
1 引 言
凸轮轴测量仪是发动机、油泵中凸轮轴的专用测量仪器[1,2],其测量准确性会影响凸轮产品的加工质量判断。为此,测量仪器在使用之前需要采用特定的标准器具进行综合示值误差的校准,从而反映仪器的计量特性[3,4]。
标准器具一般可以采用加工精度高的凸轮轴,但实际应用过程中,由于凸轮轮廓形状复杂,导致标准凸轮轴加工困难。为此,采用偏心轮轴来间接替代凸轮的方法,通过在一根轴上布置1个或多个偏心圆轮,实现凸轮轴多个参量的替代测量;且偏心圆轮采用了基本的几何圆特征,实现高精度的加工也相对较为容易。刘瑞生等[5]设计了标准偏心凸轮检具来检测凸轮轴自动测量仪综合精度和重复性精度;杨志勇等[6]利用标准凸轮轴来校准凸轮轴、曲轴测量仪;刘盟盟等[7,8]研制了偏心轴标准器,推导了偏心轴标准器理论升程的计算方法,开展了利用偏心轴标准器校准凸轮轴测量仪升程误差的方法研究。
偏心轮轴需要测量的参量包括基本的几何形位误差,如轴颈跳动误差、圆度、直线度,还包括凸轮对应的几何参量,如升程和相位角等。在实际应用中,偏心轮轴不仅可以利用凸轮轴专用测量仪进行测量,也可利用极坐标测量仪、三坐标测量机等通用型坐标测量仪器对其相关参量进行测量[9~13]。凸轮轴专用测量仪配备了平面测头、滚子测头及刀口测头,可以根据凸轮机构从动件的型式选择;而通用型坐标测量仪主要配备的都是球形测头,无法同凸轮轴专用测量仪一样直接测量得到从动件所对应的升程及升程误差。
本文提出了基于坐标反推法的偏心轮轴升程测量方法,在获取偏心圆轮表面轮廓点坐标后,通过理论推导和计算,从而实现升程及升程误差的测量。
2 偏心轮轴
偏心轮轴主要由参考轴颈、偏心圆轮、顶尖孔等部分组成,针对参考轴颈及偏心圆轮直径D、偏心圆轮相位差α、偏心距e等参量进行设计,以此模拟凸轮轴转动过程产生的偏心位移。如图1所示为偏心轮轴示意图,包括两个参考轴颈A和B,两个偏心圆轮E1和E2,其中E1和E2不仅存在相位差α,相对参考轴也存在一定的偏心量e1和e2,N1、N2、M1、M2代表其形位公差对应的基准。
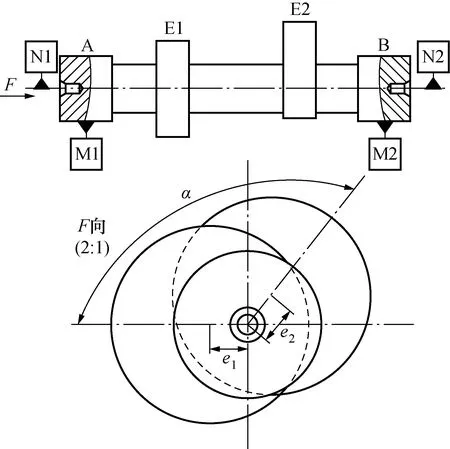
图1 偏心轮轴示意图Fig.1 Schematic diagram of eccentric wheel shaft
偏心轮轴与凸轮轴主要区别之处在于其不存在基圆,利用偏心圆轮廓替代凸轮轮廓线。如图2所示,偏心圆轮在绕回转中心O1回转过程中同样存在升程H即工作半径R在参考方向上变化量,可分为推程(A区、B区)和回程(C区、D区)两部分;升程最大的点T为其“桃尖”,位于回转中心和偏心圆圆心相连接的中心线上即180°所对应的位置;相位角θ为偏心圆轮型面上指定点与回转轴线构成的平面相对于参考平面之间的夹角。

图2 偏心圆轮升程示意图Fig.2 Schematic diagram of eccenter lift
3 理论升程与坐标反推升程
偏心轮轴在实际应用时,同样需要考虑从动件的类型,实现对不同测头升程测量误差的校准[14]。偏心圆轮的设计轮廓为标准圆,可以根据与从动件的运动规律来推导其理论升程。考虑到偏心圆轮轮廓误差的存在,其实际升程与理论升程会存在一定的差别,本文提出了一种坐标反推法,通过偏心圆轮轮廓点坐标推导出平面测头、滚子测头和刀口测头所对应的实际升程。
3.1 平面测头理论升程及坐标反推升程

H=O1O2-O1M=e(1- cosθ)
(1)

图3 平面测头理论升程计算模型Fig.3 Theoretical lift calculation model of plane probe
利用坐标测量仪器对偏心圆轮测量时,可以得到其表面点坐标值Pi(xi,yi,zi)进一步可以反推出平面测头与坐标值Pi接触时,所对应的偏心圆轮相位角和升程值。由于偏心圆轮截面为二维轮廓曲线,表面轮廓点的坐标可简化为Pi(xi,yi),如图4所示。

图4 坐标反推平面测头升程计算模型Fig.4 Calculation model of plane probe lift based on coordinate inversion
对应的平面测头升程具体求解方法如下:
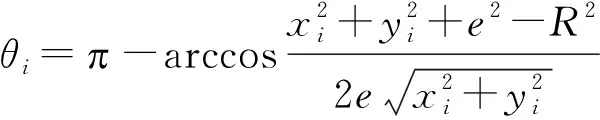
在△PiO2O1中,根据余弦定理可求得,
(2)
(3)
Hi=O1A-(R-e)
(4)
根据式(3)和式(4)可求得平面测头反推升程Hi为
(5)
3.2 滚子测头理论升程及坐标反推升程
e(1- cosθ)-(R+r)
(6)

图5 滚子测头理论升程计算模型Fig.5 Theoretical lift calculation model of roller probe
滚子测头坐标反推升程计算模型如图6所示。

图6 坐标反推滚子测头升程计算模型Fig.6 Calculation model of roller probe lift based on coordinate inversion
同理可求出滚子测头与偏心圆轮表面轮廓点Pi接触时所对应的相位角和升程值。
在△O1PiO2中,可求得
(7)

(8)
最终求出相位角θi和升程Hi为

(9)
(10)
3.3 刀口测头理论升程及坐标反推升程
对于刀口测头所对应的升程模型可简化为滚子测头半径r为0时的模型,如图7所示。 其理论升程为
(11)
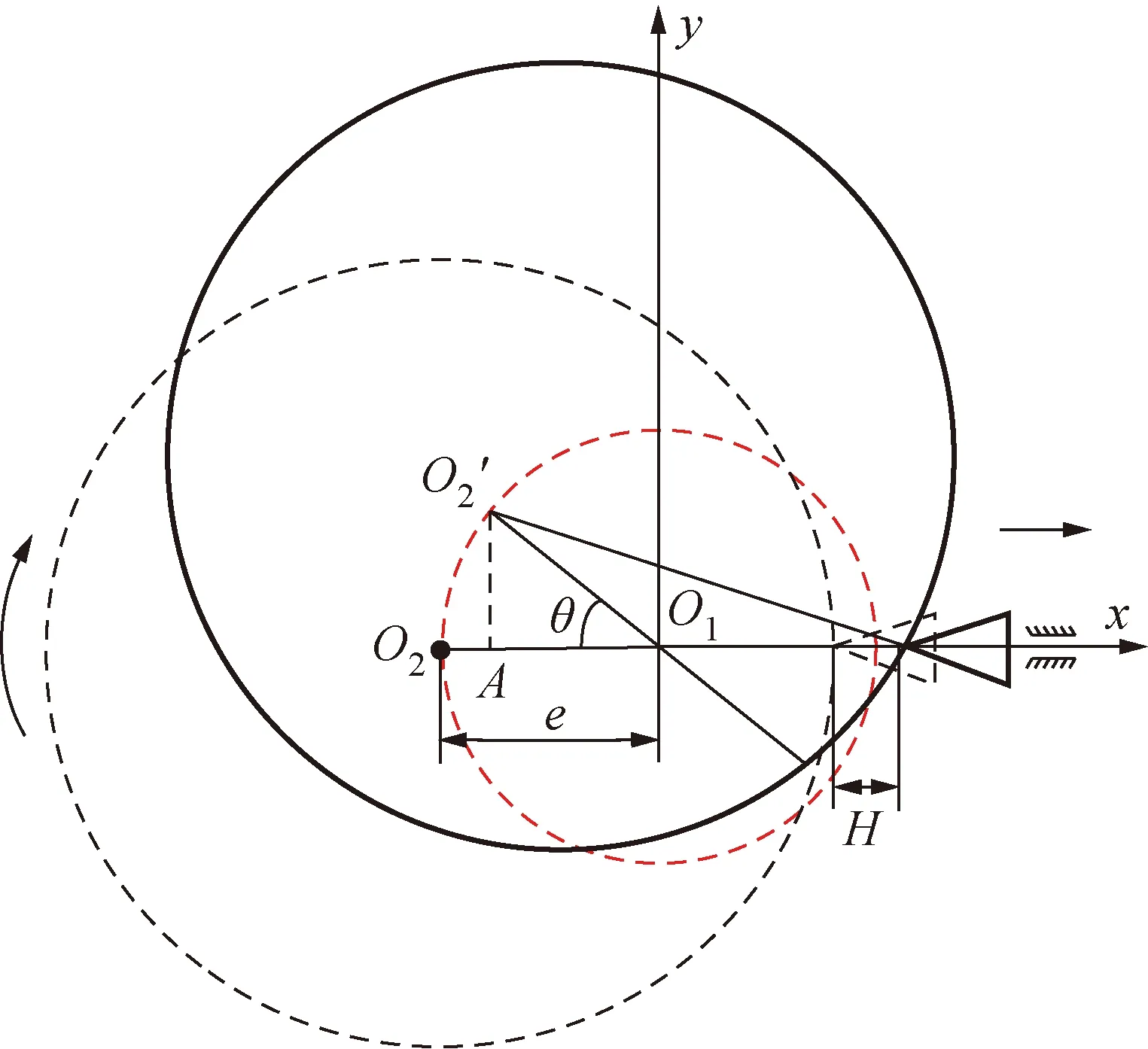
图7 刀口测头理论升程计算模型Fig.7 Theoretical lift calculation model of knife-edge probe
刀口测头对应偏心圆轮轮廓点坐标Pi反推升程计算模型如图8所示。

图8 坐标点反推刀口测头升程计算模型Fig.8 Calculation model of knife-edge probe lift based on coordinate inversion
相对应的相位角θi和升程Hi为
(12)
(13)
3.4 坐标点测量误差对升程的影响
在偏心圆轮实际的测量过程中,对其表面轮廓坐标点的测量难免存在误差,这将直接影响不同从动件的升程值。以平面测头为例,如图9所示。

图9 坐标点测量误差对平面测头升程的影响Fig.9 Influence of coordinate point measurement error on the lift of plane probe

其他从动件与平面测头类似,表面轮廓坐标点测量误差即测量仪器的精度将直接对升程值产生影响,实际计算升程时应考虑仪器测量误差带来的影响。
(14)
4 偏心圆轮“桃尖”确定
凸轮升程曲线在设计时一般是以理论凸轮升程表的形式给出一组离散数据[15,16],数据的参考起点为升程最高点即“桃尖”,因此在凸轮测量过程中需要先找到凸轮“桃尖”,参见文献[14]。
“桃尖”位置的准确性会影响凸轮升程误差,所以在确定凸轮“桃尖”的问题出现了多种处理方法,如最大值法、敏感点法、转折点法等[17]。同样,在测量偏心轮轴时也存在确定“桃尖”的问题。由于轮廓加工误差的存在,其升程最高点不一定为“桃尖”点。本文采用最小二乘法确定“桃尖”,使得升程误差的平方和为最小。
因为偏心圆轮截面为二维圆轮廓曲线,所以利用表面轮廓点坐标可拟合得到最小二乘圆心点,由回转中心点到圆心点的延长线与轮廓线的交点作为偏心圆轮“桃尖”,并以其作为参考点评定偏心圆轮升程及升程误差。
5 实验与分析
5.1 实验过程
本文采用一台极坐标测量仪器对偏心轮轴进行测量,如图10所示。

图10 偏心轮轴升程测量实验Fig.10 Eccentric wheel shaft lift measurement experiment
仪器配备3个直线运动轴系及1个回转轴系,探测系统为三维扫描测头。被测的偏心轮轴具有2个不同直径的参考轴颈A和B,2个偏心圆轮E1和E2。
具体测量步骤如下:
(1) 将偏心轮轴固定在上下顶尖之间,先粗测参考轴颈A、B和偏心圆轮E1,确定其在机器坐标系OXYZ下的位置。
(2) 利用参考轴颈A和B的圆心构建工件坐标系z轴,以偏心圆轮E1圆心和z轴构建工件坐标系x轴。
(3) 基于已建好的工件坐标系,采用极坐标测量方式,回转轴系C在回转的同时,测头沿着Y轴做跟随运动,从而测得偏心圆轮表面轮廓点坐标值。
5.2 数据处理与升程计算
(1) 偏心圆轮“桃尖”确定
坐标反推平面测头实际升程计算模型如图11所示。

图11 坐标反推平面测头实际升程计算模型Fig.11 Calculation model of actual lift of plane probe based on coordinate inversion
由第5.1节中测量步骤(1),粗测偏心圆轮所得到的最小二乘圆心为O2;由测量步骤(3),扫描偏心圆轮所得到的表面轮廓点坐标值为Pi(xi,yi),拟合计算得到的最小二乘圆心为O3,O3与O2存在角度差ε=0.010 2°。
由回转中心O1到圆心点O3的延长线与轮廓线的交点T即为偏心圆轮“桃尖”。
(2) 坐标变换与升程计算

(15)
(16)
滚子测头和刀口测头坐标反推升程计算模型与此类似。
5.3 实验结果分析
利用表面轮廓点坐标拟合得到偏心圆轮E1直径φ=59.987 4 mm,圆度误差为0.87 μm,偏心距为12.498 8 mm。将上述结果代入3种测头理论升程方程,可得到如图12所示的理论升程曲线。

图12 3种测头理论升程Fig.12 Theoretical lift of three kinds of probes
滚子测头直径3 mm,与测量实验采用的球测头直径一致。从图12可以看出,滚子测头理论升程曲线与刀口测头理论升程曲线基本重合。
将3种测头坐标反推升程与理论升程的差值曲线如图13所示。
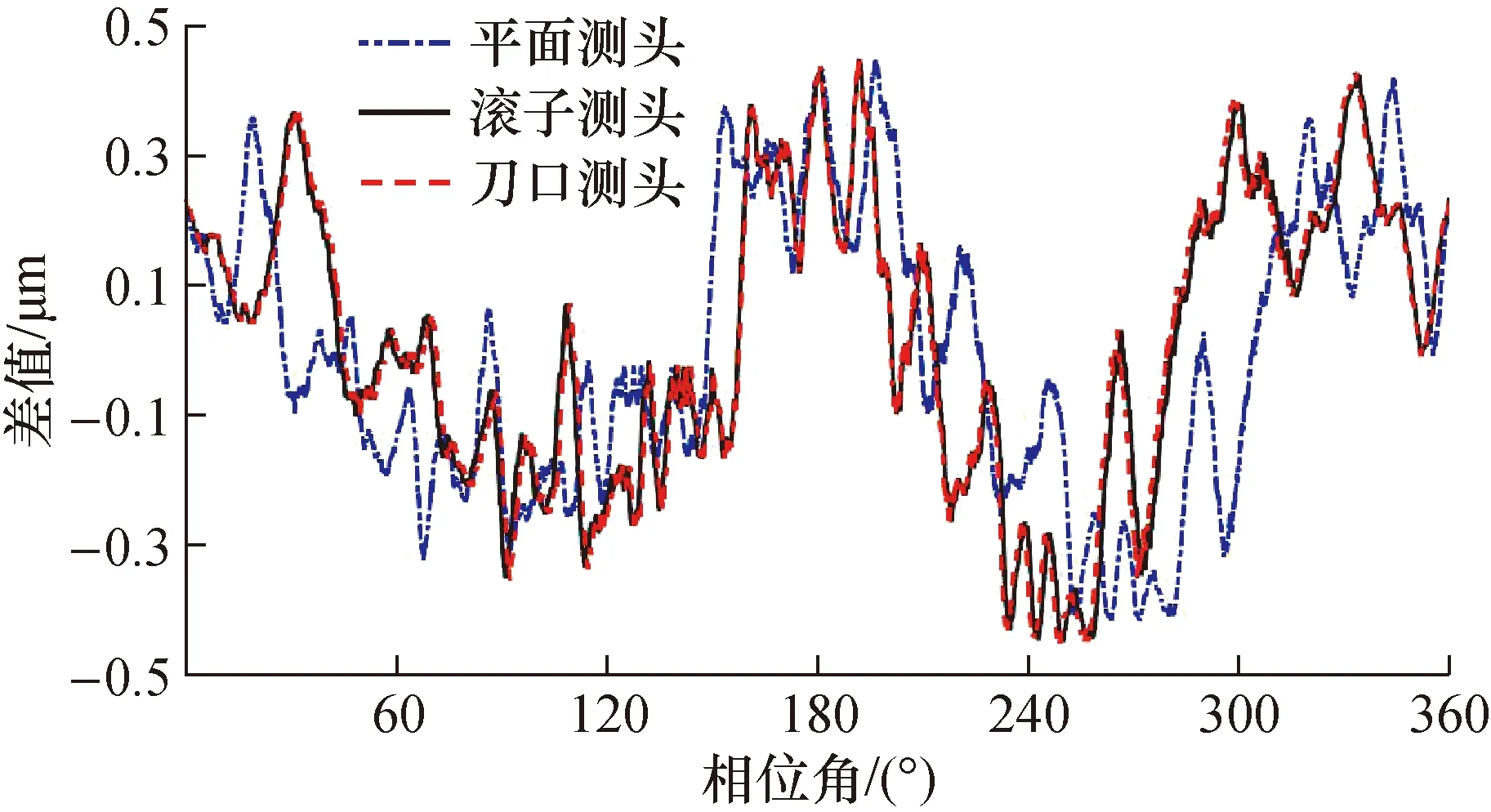
图13 3种测头实际升程与理论升程差值Fig.13 Difference between actual lift and theoretical lift of three kinds of probes
平面测头对应的升程差值为0.87 μm,滚子测头对应的升程差值为0.90 μm,刀口测头对应的升程差值为0.90 μm。可见,由于偏心圆轮轮廓误差的影响,基于坐标反推的实际升程与理论升程并不相同,前者更能准确反映实际的从动件运动规律。由于滚子测头直径较小,其对应升程差值与刀口测头对应升程差值基本相同。
6 结 论
本文提出了利用偏心轮轴表面轮廓点坐标反推平面测头、滚子测头和刀口测头的升程算法,利用最小二乘圆拟合圆心和回转中心点确定了偏心圆轮“桃尖”。在一台极坐标测量仪器上开展了偏心轮轴测量实验,根据测量数据分别计算了3种测头对应的理论升程和坐标反推升程的差值,分别为0.87 μm,0.90 μm及0.90 μm;实践证明了基于坐标反推升程的方法的有效性,能够更准确地反映从动件实际运动规律。
猜你喜欢
机床与液压(2022年7期)2022-09-17
西安航空学院学报(2021年1期)2021-07-20
航空学报(2020年5期)2020-06-03
汽车与新动力(2019年6期)2020-01-03
煤矿机电(2019年4期)2019-08-22
汽车维护与修理(2019年1期)2019-07-09
科技视界(2018年21期)2018-12-10
车用发动机(2018年2期)2018-05-02
汽车文摘(2016年8期)2016-12-07
建筑工程技术与设计(2015年26期)2015-10-21
