后桥总成动平衡采集策略研究及案例
2022-10-31 10:21马友政陈忠敏郭凯孙伟元张永强聂采顺
农业装备与车辆工程 2022年4期
马友政,陈忠敏,郭凯,孙伟元,张永强,聂采顺
(625100 四川省 雅安市 四川建安工业有限责任公司)
0 引言
汽车的舒适性和振动噪声表现是使用者最为关注的核心性能之一,传动系统的动平衡是其关键影响因素。学者做了大量的相关研究,如陈清爽[1]等研究汽车传动系统的动平衡控制方法;LIU C Q[2]等研究了独立主减速器的动平衡测试和校正方法;王慧[3]开展了柔性转子系统动平衡的分析工作;谭雨点[4]等探讨了电动车驱动轴抖动的问题;魏宜[5]等研究了发动机曲轴动平衡工艺规划方案。研究显示,目前传动系统的动平衡研究在发动机曲轴、传动轴等部件上较为成熟,关于驱动桥的动平衡研究较少。但是,驱动桥作为传动系统的核心部件,对舒适性和噪声振动的影响仅次于发动机(或电机),其动平衡研究十分必要和急切。
当下产品开发的主要动平衡方案有2 种,应用动平衡机校正和应用现场动平衡技术校正。国内外开展了多种相关研究,如安玉忠[6]等介绍了海洋石油平台设备的现场动平衡应用技术与案例;MOON J D[7]等研究了影响系数法在机床高速主轴中的应用;王贺权[8]等开发了一种动平衡机气动驱动装置;朱金光[9]等将专用动平衡试验机和仿真技术相结合,分析了收获机的动平衡问题;林水泉[10]介绍了动平衡技术的发展趋势,尤其是在线动平衡技术的优势;李静静[11]等基于LabVIEW 语言开发了一套现场动平衡测试系统。可见,产品研发普遍存在开发时间紧、产品技术状态多的现状,相比于动平衡校正机而言,现场动平衡测试具有更好适应性和灵活性,借助已有的设备和工装完成试验,还可以节省设备购置和工装开发的成本和时间。因此,本文应用现场动平衡技术,研究驱动桥在研发过程中的动平衡测试采集策略。
1 现场动平衡原理
由回转体相对于回转轴线的不均匀质量所引起的离心力效果,可由一个不在轴线上的点质量等效代替。这个点质量和它与轴线的距离的乘积就是不平衡量。这也是影响系数法的基础[12]。
单面动平衡的原理如图1 所示。转子质量为M,质心与旋转中心的距离为re,不平衡质量m,不平衡质量与旋转中心的距离为ru。则不平衡量U的公式为
离心加速度为α,离心力F可以用质心M表示,也可以用不平衡质量m表示,公式为

当M、ω恒定条件下,存在关系式为

设系数λ,上述关系式可写为

因为传感器布置在大轴承处的减速器壳体外侧,通过试验条件消减外部干扰,同时齿轮轴通过轴承与壳体刚性连接,所以传感器振动加速度响应α0与回转加速度α可视为线性相关,则公式(4)推导得到矢量表达式为

式中:系数λ0——影响系数;U0——原始不平衡量。
配重m1引起了不平衡量U1,配重后新的振动加速度响应为α2,可得矢量表达式

通过影响系数λ0,式(5)式(6)联合求得

因为加速度响应α0、α2的幅值、相位可以测得,配重m1的质量和位置已知,不平衡半径为ru预设值,U1相位可以测得,即可以求得原始不平衡量m0的质量和相位,即得到校正质量m'。
2 试验准备
后桥总成动平衡试验的传感器安装布置如图2所示。根据实验设计,1#振动加速度传感器安装在后桥主减速器主齿轴大轴承左方;2#振动加速度传感器安装在后桥主减速器主齿轴大轴承正下方;相位传感器安装在后桥主减速器凸缘正上方。

图2 动平衡试验传感器布置图示Fig.2 Schematic of sensors arrangement for balancing test
驱动桥振动噪声的核心是主减速器齿轮,其动平衡主要针对主齿轴开展,适合采用单面平衡。唯一适于作平衡面的是与主齿头部连接的凸缘端面。
在正式试验开始前,验证后桥总成在单体试验台架上的连接方式。首先按照一般安装方式(如图3 所示),使后桥总成的凸缘端与驱动电机通过短传动轴连接,半轴端与负载电机通过万向节连接。
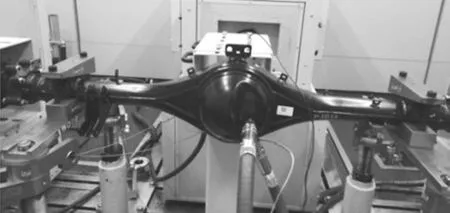
图3 后桥三端连接安装方式Fig.3 Connection installation mode of rear axle three-terminal
测试结果显示(见表1),初始测量时水平测点和垂直测点的相位差约100°,存在动不平衡;初始不平衡量为850 g·mm 和532 g·mm,幅值过大;经计算达到动平衡推荐的平衡质量分别为14 g 和9 g,质量过大。尽管2 个测点间存在幅值差异,但是一致反映出此安装状态的平衡质量过大,显然是受到了传动轴不平衡量的影响。
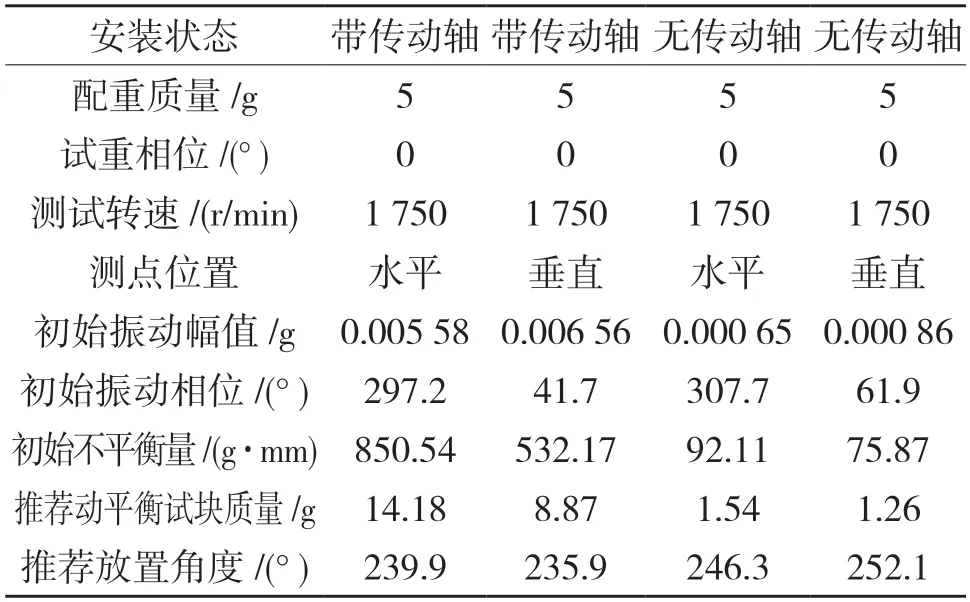
表1 两种安装状态对比Tab.1 Comparison of two installation states
因此,调整安装状态,让后桥总成的凸缘端处于自由状态,让后桥总成的半轴端与负载电机连接,由负载电机带动驱动桥旋转。
由表1知,初始不平衡量为92 g·mm和76 g·mm,处于合理的数量级;经计算达到动平衡推荐的平衡质量分别为1.53 g 和1.26 g。当前的安装状态,平衡质量的幅值减小了一个数量级,达到了合理水平。至此,完成了动平衡试验准备。
3 现场动平衡试验
为系统研究后桥总成动平衡采集策略,设计动平衡试验方案(见表2),以分析试重幅值、试重相位、测试转速、测试点位的影响。
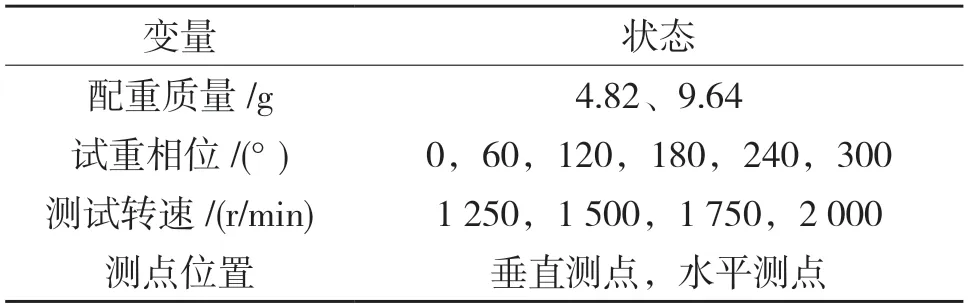
表2 动平衡试验设计关键参数Tab.2 Key parameters of balancing test
采用加配重法,配重为4.82 g 和9.64 g;试重相位在凸缘端面上等分6 份,分别为0°、60°、120°、180°、240°、300°;测试转速在问题段内选择4 个点,分别为1 250,1 500,1 750,2 000 r/min;数据测点为垂直测点和水平测点;共采集96 组数据。
3.1 配重对动平衡测试的影响
研究首次施加的配重质量的影响。首先忽视试重相位和测点位置两个变量,取其平均值。比较不同配重在不同转速下的测试结果。
图4 中2 条曲线基本一致。再对测试转速取平均值进一步分析,如表3 所示。结果表明,首次施加的配重质量的大小对动平衡试验影响较小。
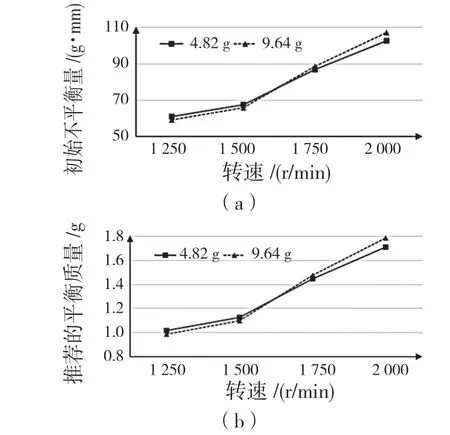
图4 配重对动平衡测试的影响Fig.4 Influence of counterweight on balancing test

表3 配重对动平衡测试结果的影响Tab.3 Influence of counterweight on balancing test results
3.2 试重相位对动平衡测试的影响
对配重质量、测试转速、测试位置3 个变量的结果取平均,研究试重相位单一因子对动平衡试验的影响。
由图5 看出,相位对动平衡试验有显著的影响。图5(c)中,推荐的平衡质量的放置角度具有明显差异,可分为3 组,0°和180°,60°和240°,120°和300°,其平衡质量的放置角度(纵坐标),组内一致,组与组之间相差120°,每一组的两个元素相位相差180°(横坐标),两个元素是布置在同一直线上的,即试重与初始不平衡量的相位差相同,得到的结果较为一致。其次,初始不平衡量和推荐的平衡质量这两个结果较为一致,其差异远小于放置角度,即试重相位对配平的影响主要来自于推荐的放置角度,也就是会影响初始不平衡量的相位的识别判断。
其中,误差产生的原因主要是测点采集的振动加速度值与平衡面的真实加速度值不是绝对线性相关。当试重加在不同的相位上时,影响系数产生了变化,导致不同的试重相位具有不同的结果。由于初始不平衡量的相位不可提前预测,因此无法在第一次试验就选择最优试重相位,必须通过配平效果判断试重相位是否适宜,是否需要进行二次配平。
3.3 测试转速对动平衡测试的影响
图4 中不同试重方案下初始不平衡量随转速变化以及图6 中不同试重相位方案下初始不平衡量随转速的变化都表明,随转速的提升,初始不平衡量提高,变化具有非线性。图7 将全部因素求平均,过1 500 r/min 点斜率升高,过1 750 r/min 点斜率降低。即1 750 r/min 附近初始不平衡量随转速变化得最快,最不稳定,数据分析以1 750 r/min 为宜。
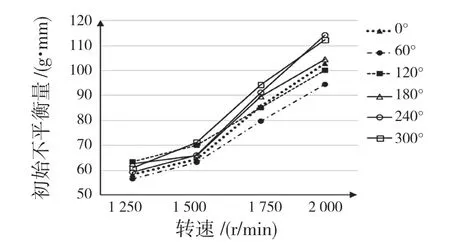
图6 不同相位下的测试转速对动平衡测试的影响Fig.6 Influence of test speed on balancing test under different phases
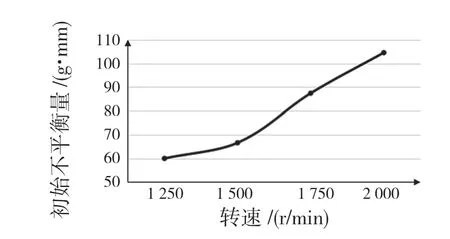
图7 平均各变量后测试转速对动平衡测试的影响Fig.7 Influence of test speed on balancing test after average variables
3.4 测点位置对动平衡测试的影响
随试重相位的变化,垂直测点的初始不平衡量间的差距更小,波动更平稳。相对于水平测点,能更好地获得稳定的结果,另外垂直测点测得的初始不平衡量更大,参见图8。
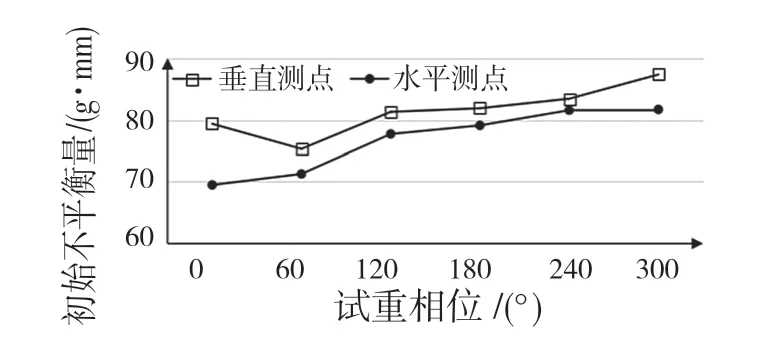
图8 不同相位下的测点位置对动平衡测试的影响Fig.8 Influence of measuring point position on balancing test under different phases
根据式(1),在纯理论条件下,不平衡量不应该随转速变化。但是图9 展示的结果明显与上述理论不符。出现这种现象的原因是,凸缘和主齿轴系存在柔性环节,导致随转速提高系统变形加剧或齿轮油偏心等,不平衡量加剧。
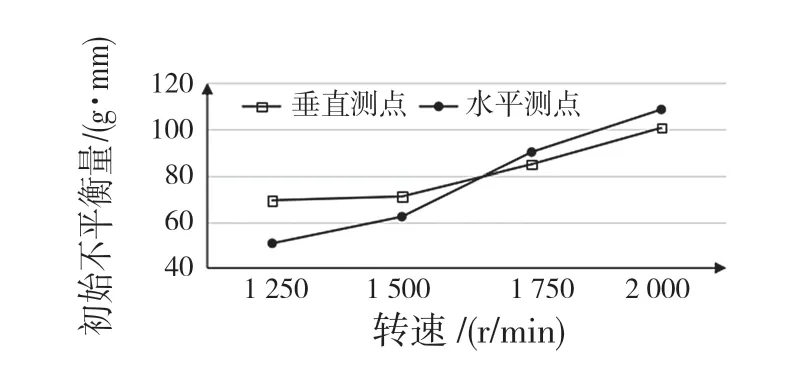
图9 不同转速下的测点位置对动平衡测试的影响Fig.9 Influence of measuring point position on balancing test at different rotational speeds
进一步比较垂直测点与水平测点随转速变化的趋势,垂直测点线性程度更高,结果更稳定。因此,选择垂直测点可以减小不同转速间的测试变差,这点尤为重要。
3.5 驱动桥动平衡测试效果验证
通过对比试验分析配重质量、试重相位、测试转速、测点位置4 个影响因素对驱动桥动平衡试验的影响。首次施加的配重质量对动平衡试验的影响较小,选择小质量为宜;试重相位对不平衡量相位的准确识别影响较大,但无法在试验前选择最优值,将初始相位定位0°;测试转速在1 750 r/min时转速敏感度最高,应优先平衡;垂直测点的测试结果随转速线性变化,测量结果置信度最高。表4、表5 显示样桥经动平衡后,不平衡量由75.87 g·mm减小到22.46 g·mm,减小了70%,达到了客户要求。

表4 样桥动平衡测试初始状态Tab.4 Initial states of balancing test of sample axle
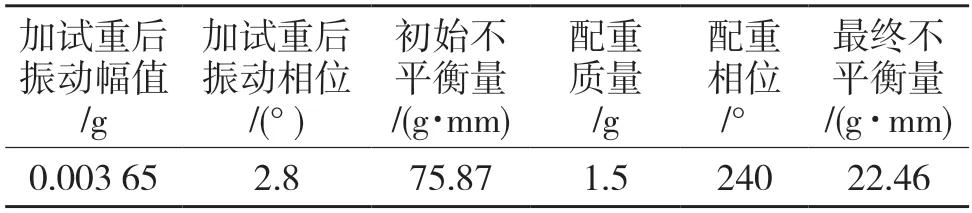
表5 样桥动平衡校正后状态Tab.5 States of sample axle after balancing correction
对动平衡前后的样桥进行噪声振动测试,如图10 所示。后桥阶次噪声平均值由53.4 dB 降至47 dB,降低了12%;后桥阶次振动平均值由0.06 g降至0.02 g,降低了66.67%。通动平衡校正,后桥噪声振动幅值明显降低。
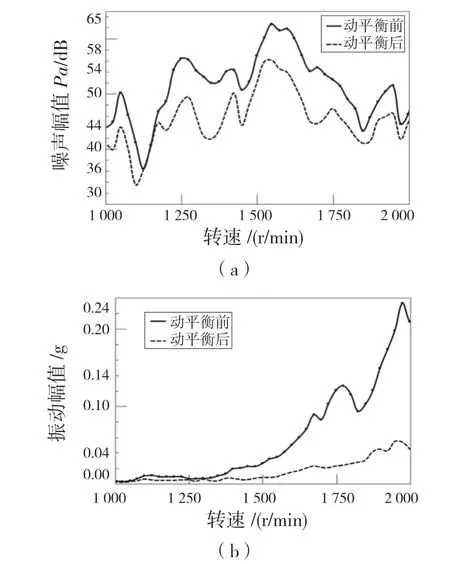
图10 样桥的噪声振动测试Fig.10 Noise and vibration test of sample axle
4 结论
针对驱动桥动平衡研究匮乏的现状,利用现场动平衡检测技术开展驱动桥动平衡采集策略研究,并进行了案例验证。
对比试验表明:(1)采用输入端的凸缘保持自由、输出端的半轴与负载电机连接的安装状态,驱动桥动平衡测试的结果更加准确真实;(2)首次试重质量对动平衡测试结果影响很小,可忽略;(3)首次试重的相位对动平衡测试的影响较大,但无法避免;(4)受系统柔性变形影响,测试转速对动平衡测试有一定影响,选择不平衡量变化最敏感的转速进行试验最为适宜;(5)垂直测点比水平测点的测试结果稳定。
根据以上研究制定驱动桥动平衡测试方案:确定首次试重、首次试重相位、测试转速、测点位置等参数。采用上述方案完成案例的动平衡校正:其不平衡量大幅下降,达到客户要求;后桥阶次噪声均值、阶次振动均值明显降低,NVH 水平显著提高。
研究结果证明后桥总成动平衡采集策略可靠有效,说明动平衡校正可以有效提升后桥NVH 性能,同时为量产产品的动平衡工艺提供了重要的技术支撑。针对首次试重相位的影响较大却无法在初次试验中选择最优值的问题,需要在进一步研究中寻求解决方案。
猜你喜欢
现代园艺(2022年17期)2022-08-23
世界汽车(2022年6期)2022-07-13
汽车实用技术(2022年9期)2022-05-20
杭州(2021年22期)2021-12-15
考试与评价·高二版(2021年4期)2021-09-10
东坡赤壁诗词(2019年5期)2019-11-14
计算机辅助工程(2018年2期)2018-06-03
汽车之友(2017年18期)2017-10-31
现代电子技术(2015年11期)2015-07-28
城市建设理论研究(2012年6期)2012-04-10