线驱动仿海豹尾部推进机构设计与运动学分析
2022-11-01 08:01刘玉红刘书赫邓仕晗李厚存冯登雪
天津大学学报(自然科学与工程技术版) 2022年2期
刘玉红,刘书赫,邓仕晗,李厚存,冯登雪
线驱动仿海豹尾部推进机构设计与运动学分析
刘玉红,刘书赫,邓仕晗,李厚存,冯登雪
(天津大学机械工程学院,天津 300072)
仿生推进由于具有速度快、效率高、机动性好、噪声污染低等优势,在水下机器人领域备受青睐.基于对海豹尾部生物结构及运动特征的研究,提出并设计了一种基于线驱动原理并结合柔性铰链机构的仿海豹尾部摆动推进机构.该机构包括脊椎框架单元、骨盆单元、胫骨单元以及柔性尾鳍单元,其关节采用柔性铰链,并通过两侧弹性元件的对称布置,可实现由单一舵机驱动仿生推进机构实现周期性摆动动作.采用D-H参数法对推进机构进行运动学分析,确定了推进机构尾鳍末端点在世界坐标系中的坐标,研究了仿生推进机构等效连杆摆角参数(摆动角、摆动幅值、初始角)对推进机构摆动幅值的影响规律.根据运动学分析结果,采用序列二次规划法对设计的仿生推进机构等效连杆摆角参数进行了优化,获得了与海豹尾部摆动幅值一致的最佳运动参数;在与海豹相同的游动速度下,推进机构尾鳍末端点的摆动轨迹与生物海豹的摆动轨迹基本吻合,验证了优化分析的正确性.在空气中进行原理样机摆动实验,通过摄像机连续拍摄的运动序列图,获得了实验样机尾鳍的摆动轨迹拟合曲线,与优化后的理论曲线对比,进一步验证了仿海豹尾部推进机构设计与分析的正确性.
仿海豹尾部推进机构;线驱动;柔性铰链;运动学分析;D-H参数法
水下滑翔机[1]作为一种新型水下机器人,具有低能耗、长续航能力、低噪声和低成本等优点,但其航速低、机动性和抗流能力差.近年来,随着水下滑翔机应用领域的扩大,对其运动性能,尤其是对机动性和抗流能力提出了更多和更高需求.当前的解决方案多为在水下滑翔机尾部加装螺旋桨推进器[2-4],但螺旋桨的高能耗、大噪音对水下滑翔机原有优势有所损伤.由于仿生推进具有高速、高效、灵活、低噪等特点[5],因此,本文研究将仿生推进与水下滑翔机融合,以提升其运动性能.
仿生推进的研究可追溯至1926年,Breder等[6]根据鱼类在推进时所使用的部位不同,将鱼类的运动方式分为身体-尾鳍模式(body and caudal fin,BCF)与中央鳍/对鳍模式(median and/or paired fin,MPF).BCF模式是大多数鱼类所采用的游动模式,通过摆动或波动部分身体及尾鳍,利用水流的反作用力实现向前游动,在高速巡游时具有较高的游动效率.BCF模式研究较多的是鱼类仿生推进,例如,Chhabra等[7]仿照黄鳍金枪鱼,研制了涡流控制无人水下航行器VCUUV,采用液压驱动的4关节尾鳍装置,游动速度可达1.2m/s,转向速率可达75°/s;梁建宏等[8]研制了两关节仿生水下航行器SPC-Ⅲ,外形与鱼雷相近,在摆动频率为2Hz时,通过尾鳍推进可获得1.1m/s的航速,最小转弯半径为0.75倍体长.除鱼类外,Nakashima等[9]研制了两关节自推进式机器海豚,外形仿海豚流线型,尾部具有两个关节,分别用空气马达与弹簧驱动,最大游速可达1.2m/s,效率可达0.35.MPF模式主要以背鳍、腹鳍、胸鳍和臀鳍作为推进部位,在低速状态下具有较高的机动性、稳定性及游动效率.Zhou等[10-11]研制了仿生蝠鲼实验样机RoMan-Ⅱ,通过鳍条拍动产生推进力,可实现原地转动及后退动作,稳定时速度为0.5m/s.田伟程[12]研制了一款四鳍拍动仿生海龟,可实现原地转向,最大前进速度可达1m/s.
综上,现有仿生推进研究大多面向各种鱼类、海豚、海龟等,与之相比,海豹体型呈纺锤形,长径比与水下滑翔机更为接近,可通过两片尾鳍的灵活摆动产生较大推进力,以较高的游动速度驱动庞大的身躯,最高游动速度可达1.42m/s,最高效率可达0.85[13].因此,本文提出以海豹为原型的仿生设计,通过对海豹尾部骨骼结构及其摆动规律的研究,设计仿海豹尾部结构及运动规律的仿生推进机构,分析并优化设计的仿生推进机构参数,通过实验验证了本文提出的仿生推进机构的合理性.
1 仿海豹尾部推进机构设计
1.1 海豹尾部骨骼结构及运动方式
海豹属于鳍足目海洋哺乳动物,主要生活在南北极两地.其身体呈纺锤型,周围由肥厚的皮脂包裹,四肢呈鳍状.海豹的最大身体直径位于0.5~0.6倍体长处,长径比约为3.7~4.6[13],处于海洋生物的最佳长径比范围3~7[14]之内,具有大体积小阻力的外形优越性.海豹在水中推进主要依靠尾部摆动,胸鳍主要提供转向功能[13].如图1所示,海豹尾部主要由腰椎、骨盆、胫骨、尾鳍组成[15].其中,腰椎由脊椎和椎间盘组成,用于连接骨盆与胸腔,使骨盆可绕海豹躯体做横向摆动动作.海豹股骨较短且扁平,可近似作为髋关节用以连接胫骨与骨盆.海豹尾鳍趾骨两侧较长,中间较短,整体呈月牙状[15],通过踝关节连接于胫骨后方,可同时实现尾鳍的伸展及侧向摆动 动作.
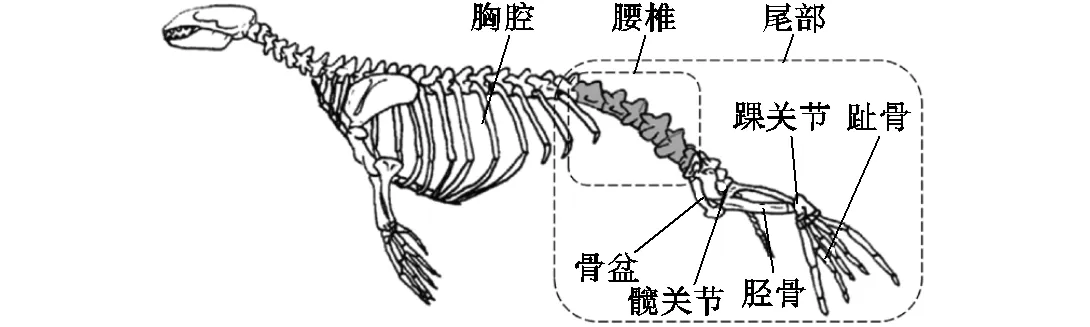
图1 海豹骨骼结构
海豹的游动方式更接近于BCF模式.在游动时,海豹会横向摆动腰椎,通过骨盆振动带动胫骨及尾鳍摆动,提高后肢推进力.成年海豹游动速度变化范围为0.60~1.42m/s,摆动频率变化范围约为0.5~1.3Hz,随游动速度呈线性增加.其单侧尾鳍的平均摆动幅值约为306~333mm,与游动速度无关.在腰椎的带动下,海豹尾部的综合摆动幅值约为455mm.其尾鳍尾尖的平均横向摆动速度随游动速度的增加而增加,变化范围为0.49~0.94m/s[13].海豹尾部的整个摆动周期可分为动力冲程和恢复冲程(如图2所示),两个冲程分别约占总摆动周期的50%[16].动力冲程与恢复冲程的摆动规律相同,方向相反.两冲程起始阶段,后方尾鳍由收缩状态逐渐展开(如图2(a)-1、图2(b)-5所示),前方胫骨与尾鳍绕踝关节向内做小幅度弯曲动作(如图2(a)-2、图2(b)-6所示);两冲程达到中期阶段时,前方尾鳍趾骨逐渐内收,鳍面近乎弧形收缩至最小(如图2(a)-3、图2(b)-7所示);两冲程结束阶段,前方尾鳍完全收缩,后方尾鳍鳍面完全展开且与水平面近乎保持垂直状态(如图2(a)-4、图2(b)-8所示).
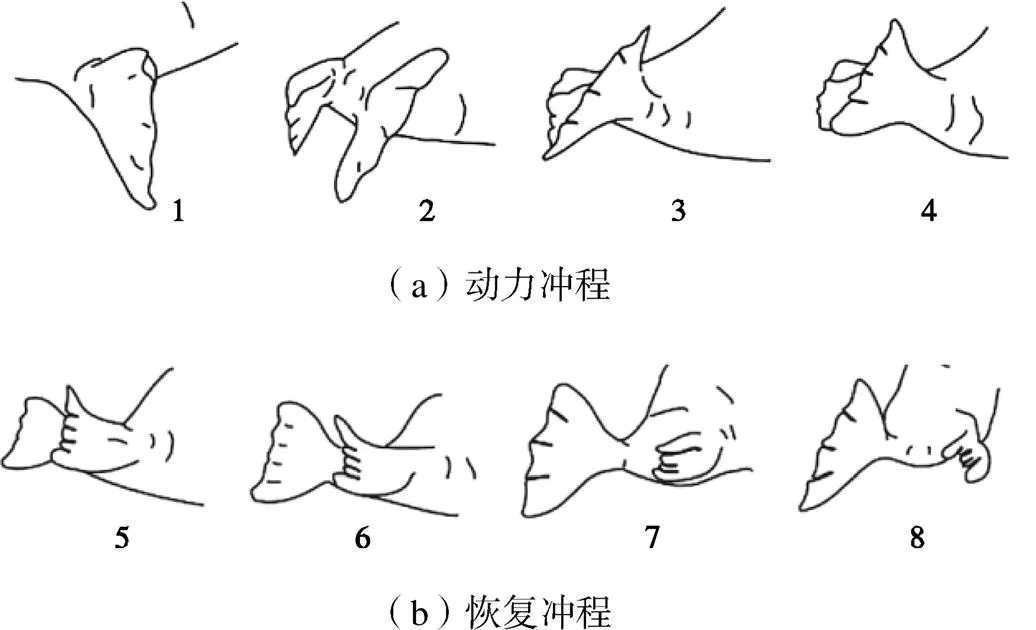
图2 海豹尾部运动方式
1.2 仿海豹尾部推进机构
依据海豹尾部骨骼结构及运动方式分析,设计的仿海豹尾部推进机构(以下简称推进机构)如图3所示,主要包括:脊椎框架单元、骨盆单元、胫骨单元以及柔性尾鳍单元,分别对应于海豹尾部的胸腔、骨盆、胫骨以及由趾骨支撑的月牙形尾鳍.推进机构的外形轮廓与海豹尾部一致,分为第1段刚性外壳体、第2段柔性外壳体以及第3段刚性外壳体,可通过第2段柔性外壳体实现柔性变形.
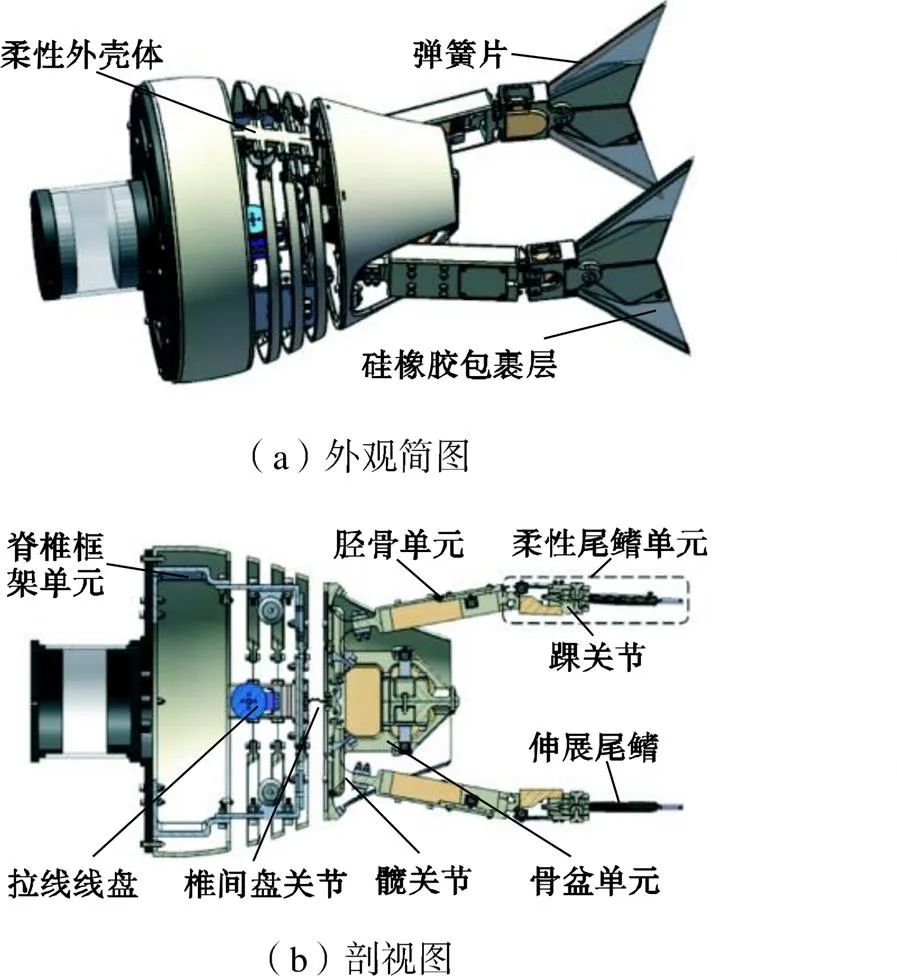
图3 仿海豹尾部推进机构三维模型
由于海豹尾鳍为双关节尾鳍,且通过尾鳍的不对称周期性摆动实现推进.因此推进机构具有较多的旋转关节.在关节连接上,若采用传统铰接机械结构,则在装配时会产生装配间隙,增加机构的摩擦损耗,降低机械效率,并且难以实现海豹尾部柔顺的摆动动作.与之相比,柔性机构结构简单、无配合间隙、无摩擦与磨损,可通过弹性变形实现能量的存储与转化[17].因此,本文提出一种线驱动与柔性铰链相结合的仿生推进机构,其关节采用柔性铰链机构,通过两侧弹性元件的对称布置,仅通过单一驱动舵机即可实现海豹尾部的周期性摆动动作,如图3(b)所示,推进机构整体呈对称结构,采用线驱动,通过舵机带动线盘控制拉线并经各单元的内置定滑轮导向实现驱动.脊椎框架单元与骨盆单元间通过“X”型交叉簧片式柔性铰链[18]连接,对应于海豹的椎间盘关节.在拉线的驱动下可使骨盆单元相对脊椎框架单元做横向往复摆动动作.骨盆单元与胫骨单元间通过“Y”型交叉簧片式柔性铰链[18]连接,对应于海豹两侧的髋关节,通过胫骨单元内侧拉线的拉紧与松弛可使胫骨单元相对骨盆单元做小幅度横向往复摆动动作.柔性尾鳍单元包括踝关节及伸展尾鳍,伸展尾鳍通过踝关节连接于胫骨单元两侧后方,与海豹尾鳍相同,可实现绕踝关节的内曲及随摆动的展弦比变化.同时,伸展尾鳍设有内置弹簧片,外侧由硅橡胶包裹,在水流的作用下可实现与海豹尾鳍相同的单侧弧形内收动作.
2 运动学分析及优化
2.1 尾鳍末端摆动轨迹分析
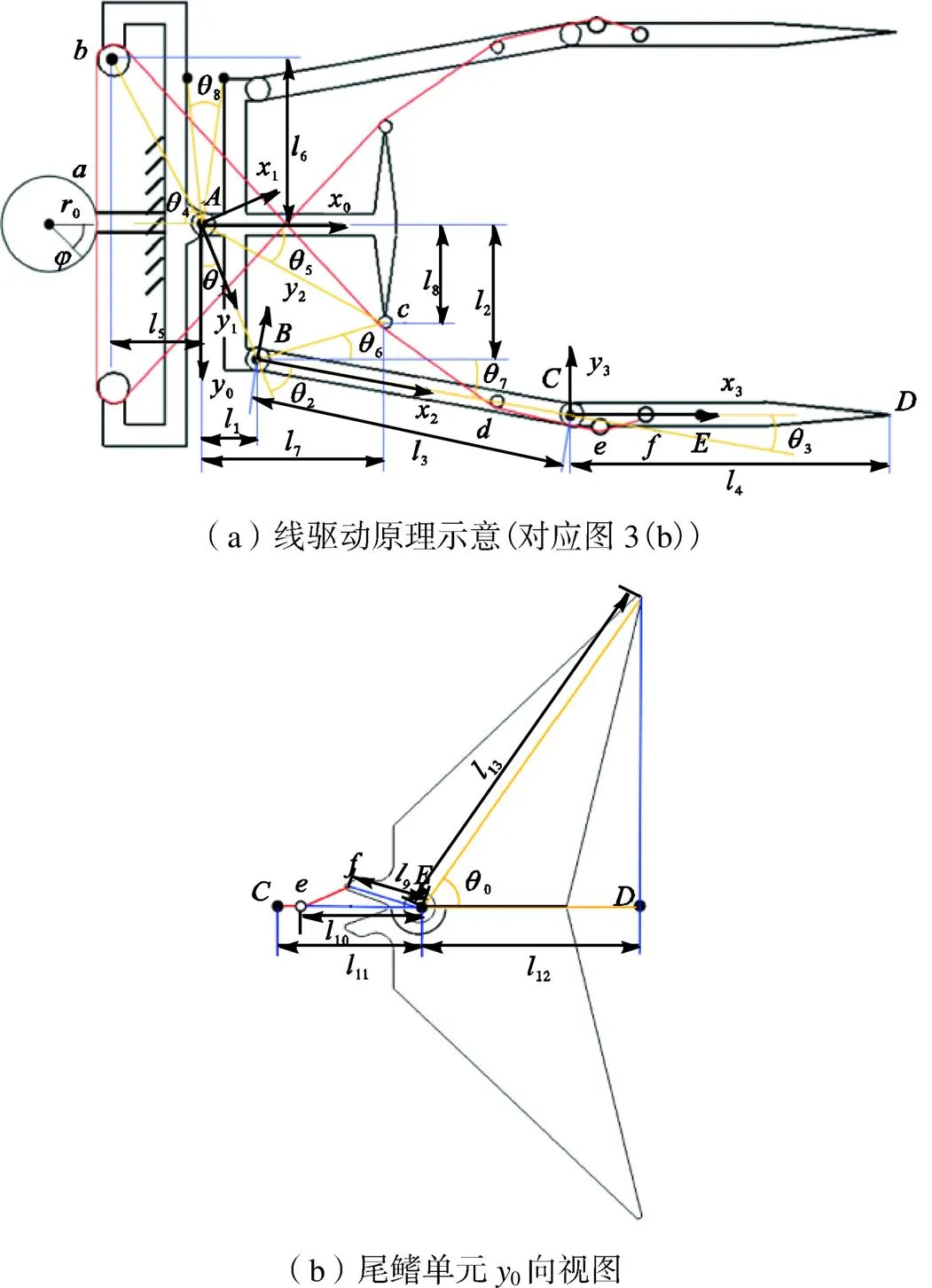
图4 机构驱动原理示意
表1 仿海豹尾部推进机构D-H参数
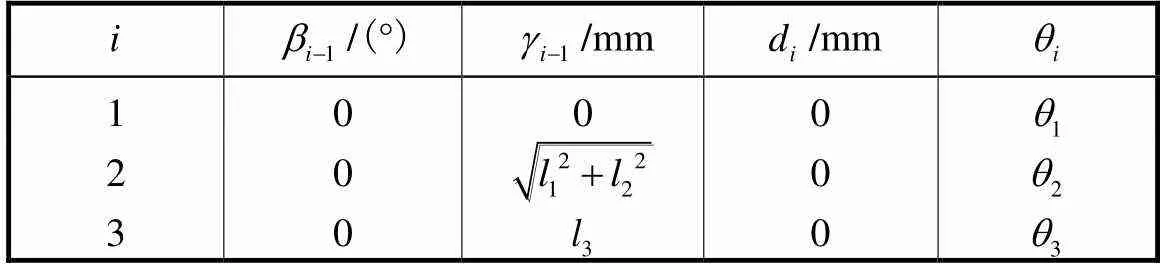
Tab.1 D-H parameters of bio-inspired propulsion mechanism
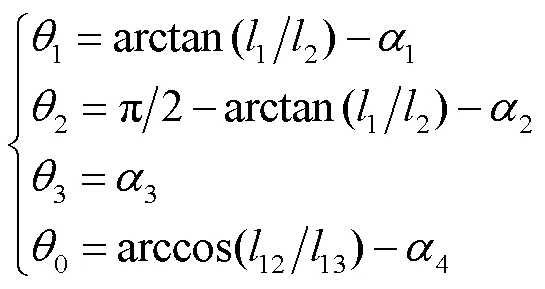
由图4几何关系可得

由海豹运动特征分析知,其尾部摆动幅值与游动速度无关,而摆动频率与游动速度可近似为线性关 系[13],即

由转换矩阵进行机构运动传递,即
(4)
将D-H表参数代入可得

则点在世界坐标系00中的坐标为
2.2 摆动轨迹影响因素分析
Tab.2 Parametersofswing angles

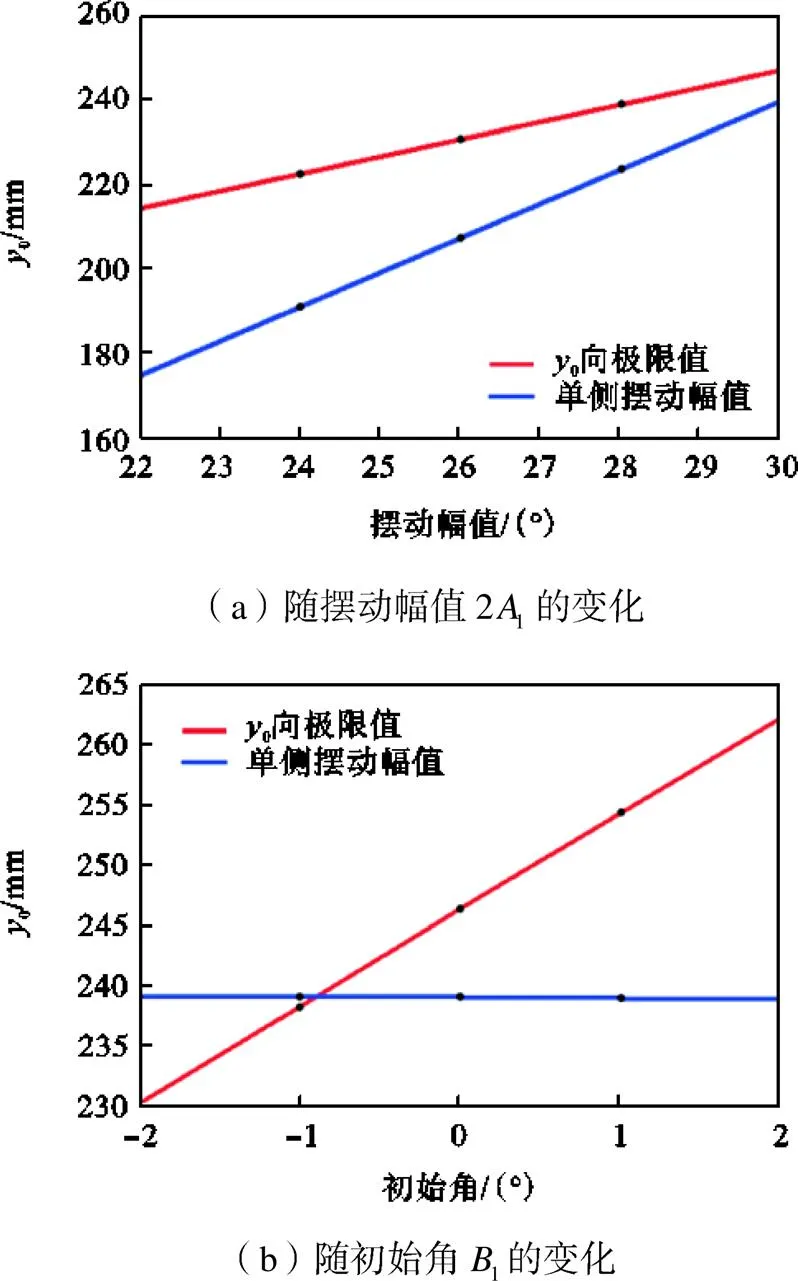
图5 末端点D的向坐标随等效连杆AB摆动角的变化

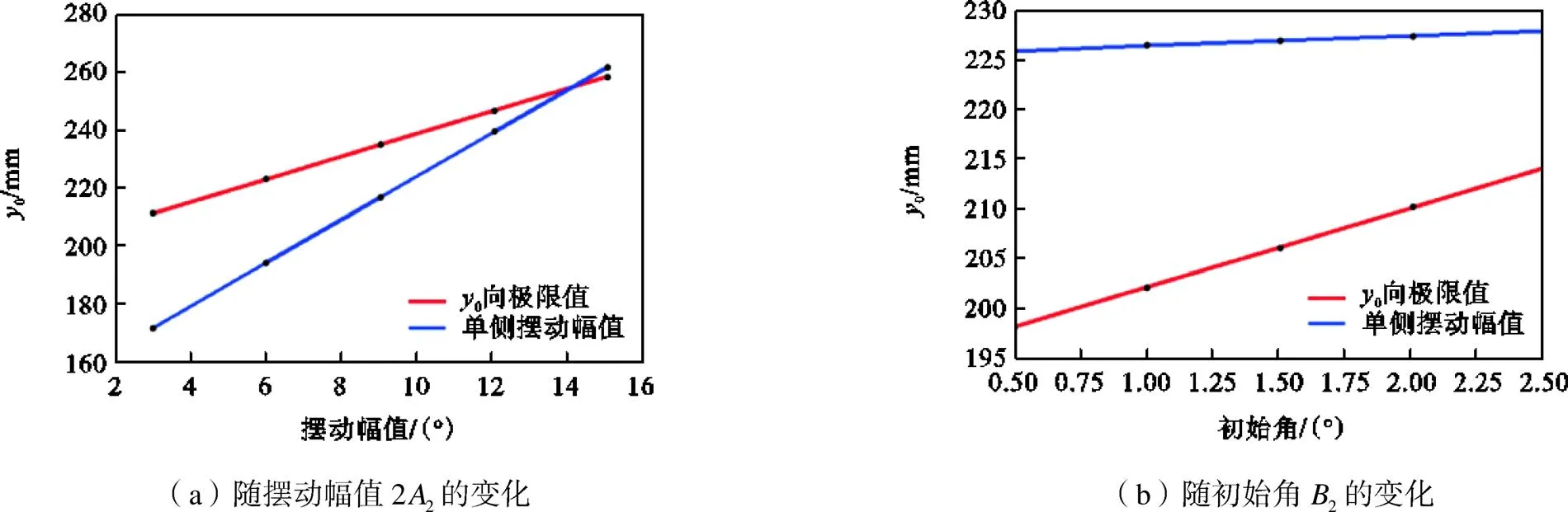
图6 末端点D的向坐标随等效连杆BC摆动角的变化

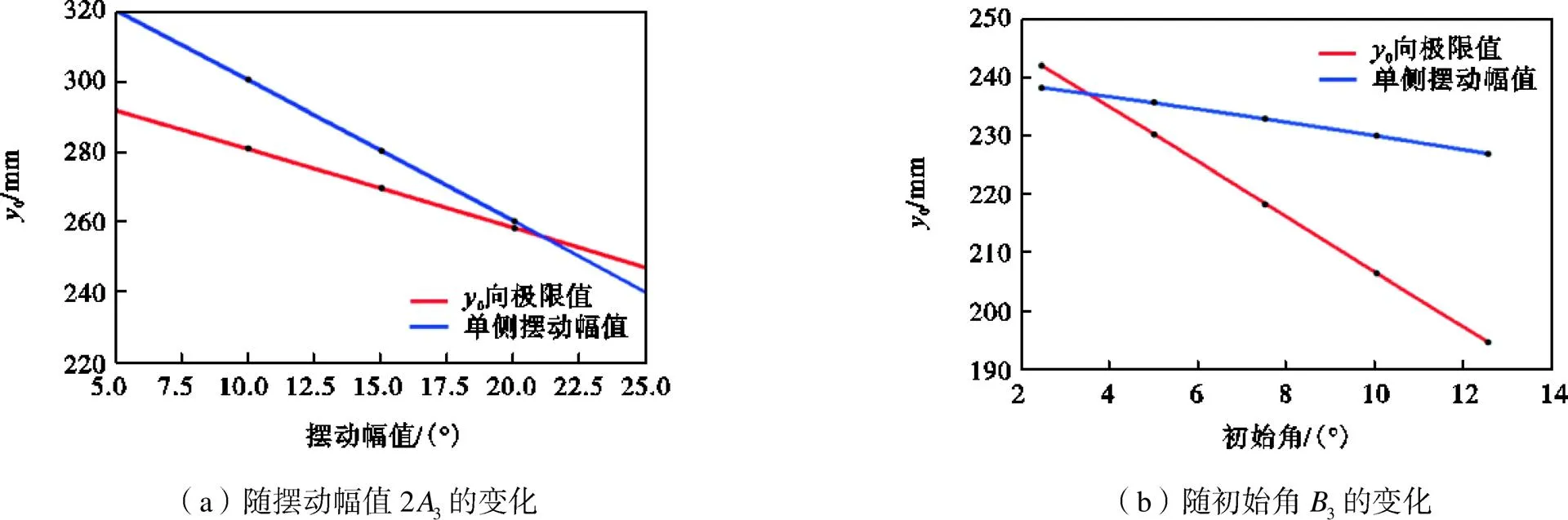
图7 末端点D的向坐标随等效连杆CD摆动角的变化
2.3 摆动轨迹优化


约束条件为
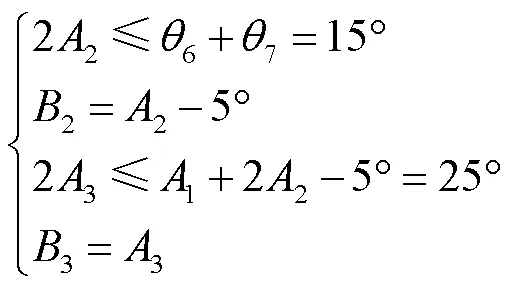




由几何关系知
约束条件为
为进一步验证优化结果的正确性,根据文献[13],在相同游动速度下对推进机构与海豹尾部的摆动轨迹进行比较.已知文献[13]中海豹尾部的游动速度为1.42m/s,由式(3)可知,此时海豹尾部摆动频率
Tab.3 Parameters of swing angles after optimization
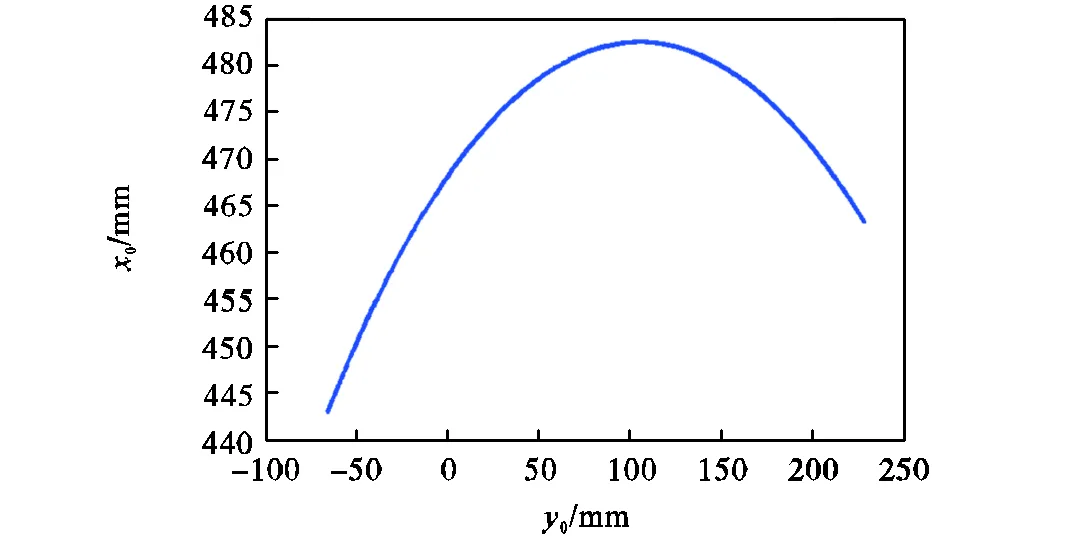
图8 推进机构末端点摆动轨迹
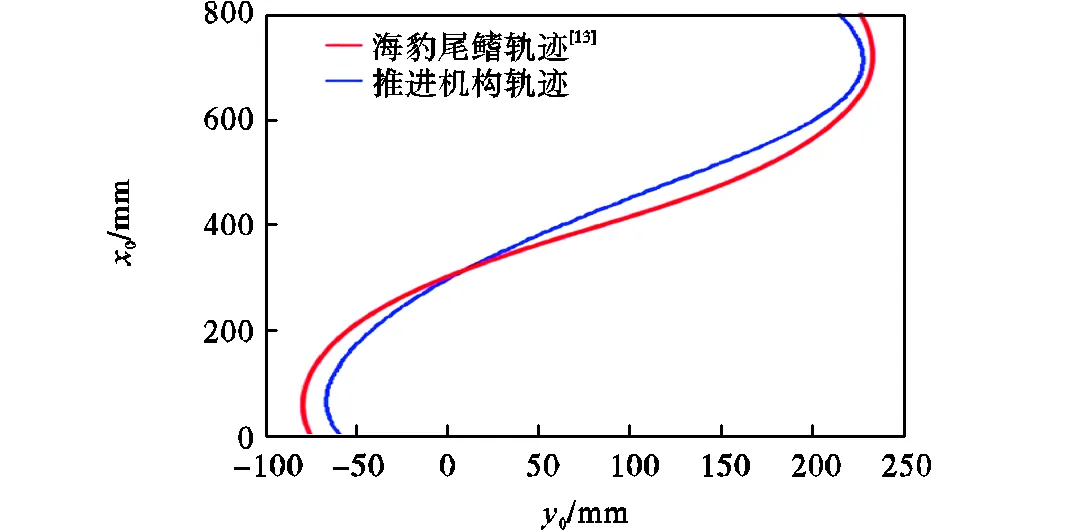
图9 推进机构末端摆动轨迹与海豹尾鳍末端摆动轨迹对比(游动速度m/s)
2.4 侧向摆动速度
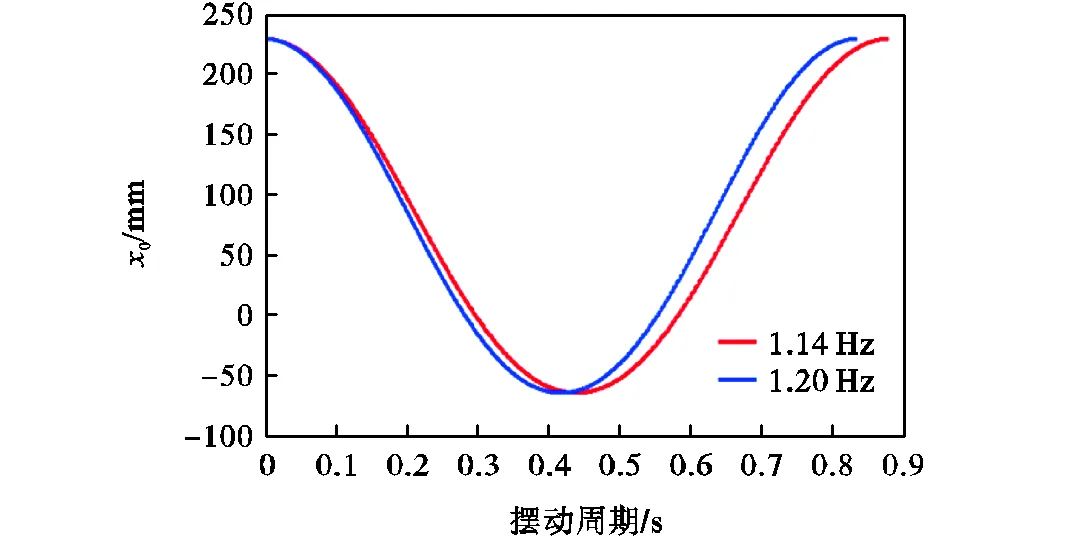
图10 不同频率下点D的向坐标变化曲线
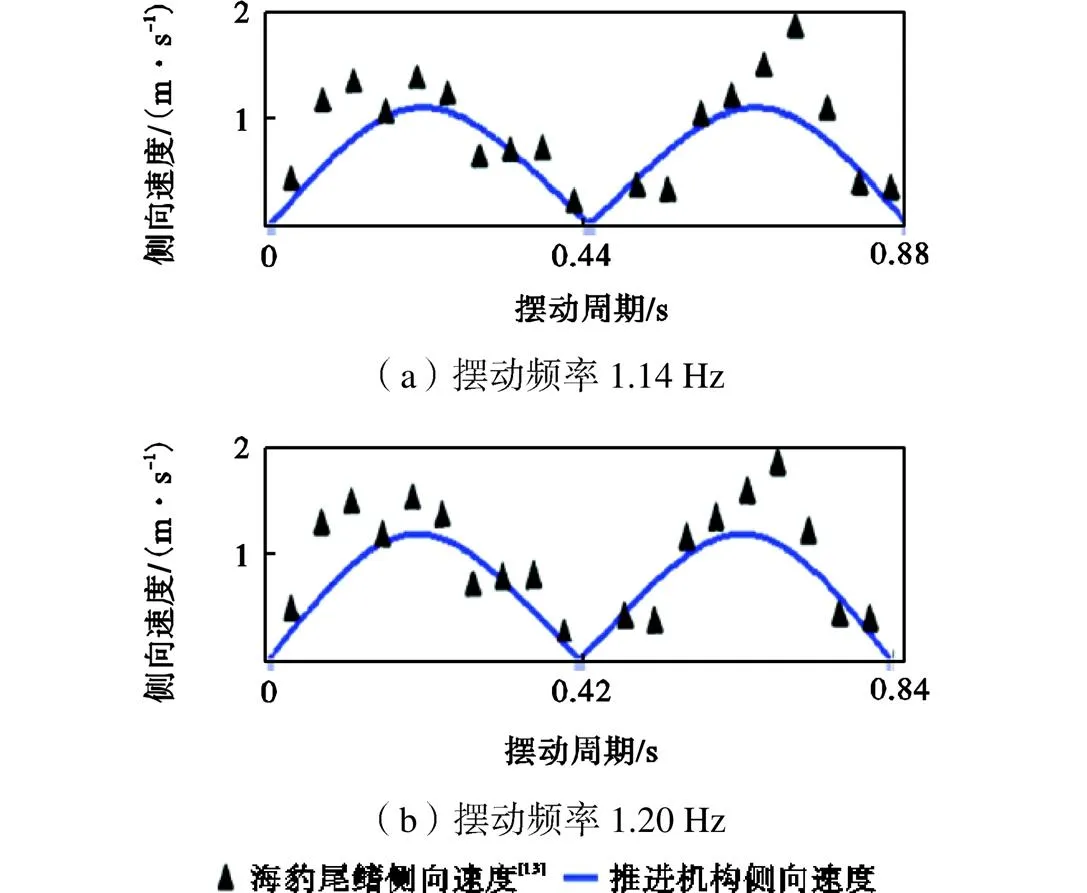
图11 推进机构末端点与海豹尾鳍末端点侧向摆动速度对比
3 实验研究
根据分析结果,设计实验样机(如图12所示),在空气中进行摆动实验.图13所示为当推进机构摆动频率为0.5Hz时利用摄像机连续拍摄的运动序列图.由图13可知,推进机构两侧尾鳍分别在1/4和3/4周期摆动至最外侧极限位置,在1/2周期和整周期时归位至中位位置,与推进机构摆动轨迹分析及海豹尾部摆动规律一致.
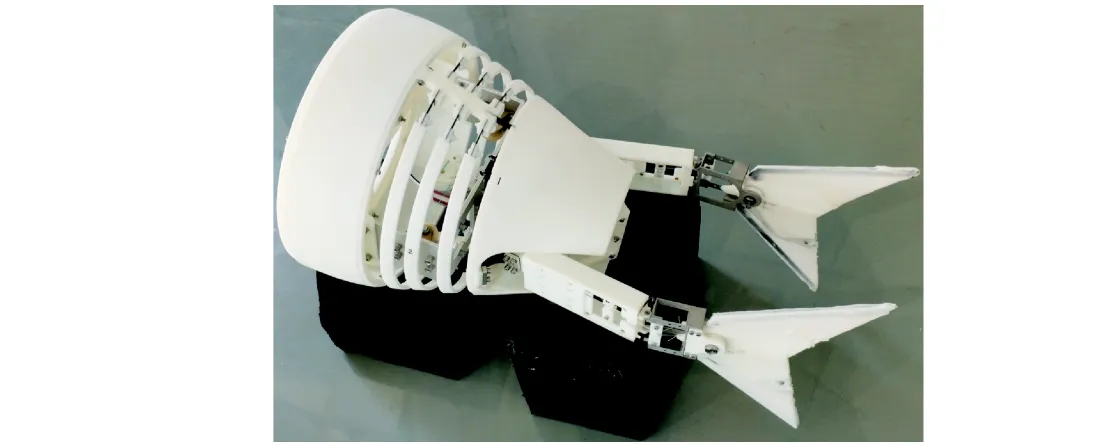
图12 推进机构实物
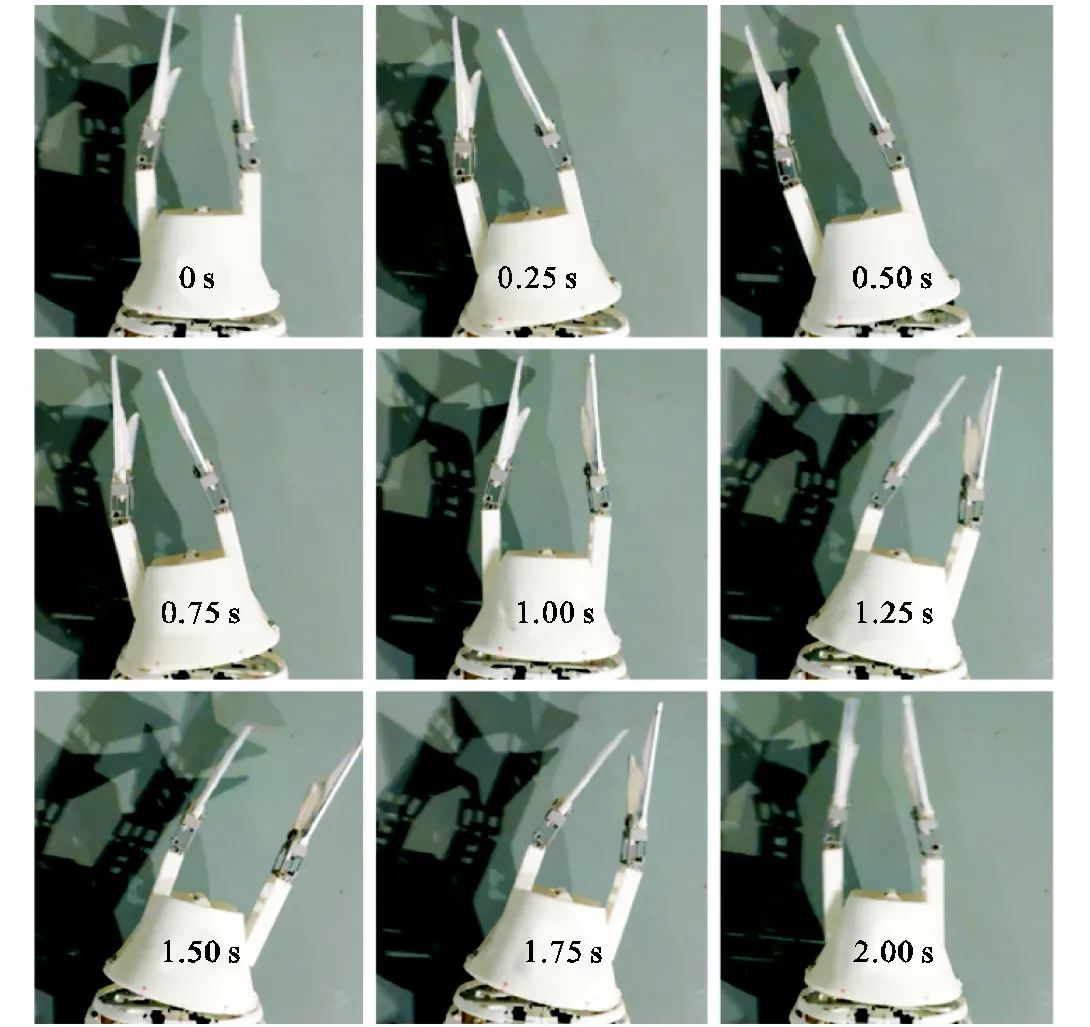
图13 实验样机的运动序列
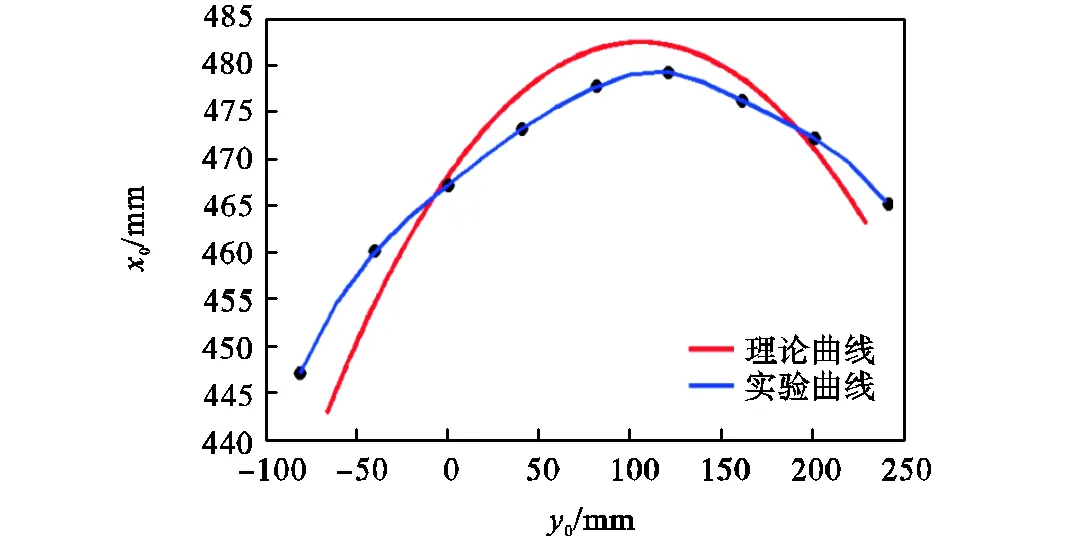
图14 实验样机摆动轨迹拟合曲线与理论曲线对比
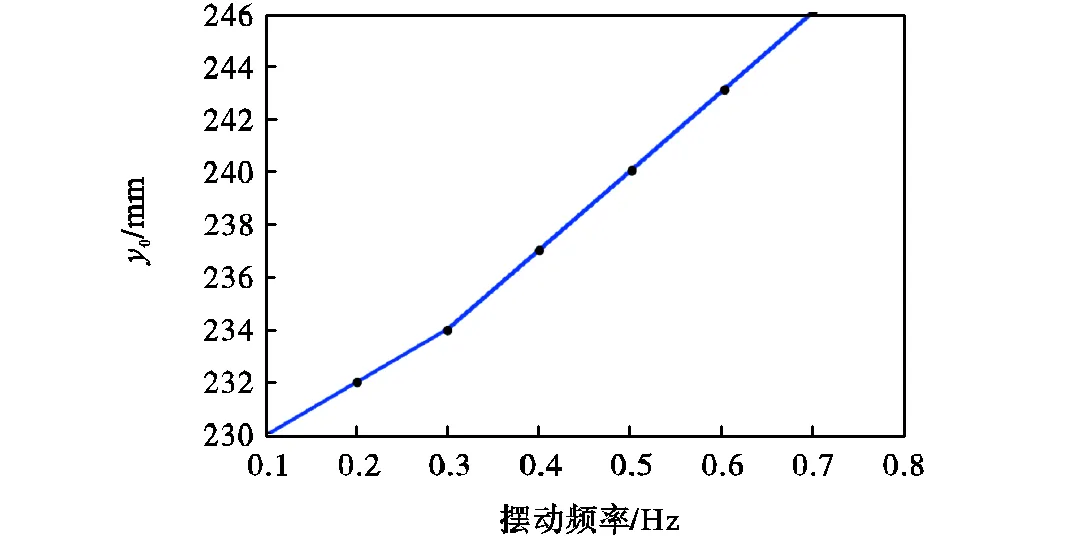
图15 摆动幅值随摆动频率变化曲线
通过实验样机摆动实验,证明了推进机构摆动轨迹分析的正确性以及所确定的各项参数的合理性,为线驱动仿海豹尾部推进机构进一步的动态研究奠定了研究基础.
4 结 论

(4)通过实验样机的摆动实验,验证了在不同摆动频率下,推进机构摆动轨迹与理论分析一致,可基本实现海豹尾部摆动动作,验证了推进机构设计方案的合理性以及正确性.
在未来的工作中,将对所设计的线驱动仿海豹尾部推进机构进行流体仿真,探究其摆动频率、游动速度、推进力之间的关系,并通过实验验证结论的正确性.采用更换尾鳍的方式对比分析刚性尾鳍与柔性尾鳍对摆动时产生推进力的影响,同时分析影响推进机构机械效率的因素,验证仿海豹尾部推进机构的高效性.
[1] 何柏岩,杜金辉,杨绍琼,等. 基于 VMD-LSSVM 的水下滑翔机深平均流预测[J]. 天津大学学报(自然科学与工程技术版),2021,54(4):388-396.
He Baiyan,Du Jinhui,Yang Shaoqiong,et al. Prediction of underwater glider depth-averaged current velocity based on VMD-LSSVM[J]. Journal of Tianjin University(Science and Technology),2021,54(4):388-396(in Chinese).
[2] Claustre H,Beguery L,Patrice P L A. SeaExplorer glider breaks two world records multisensor UUV achieves global milestones for endurance,distance[J]. Sea Technology,2014,55(3):19-22.
[3] Wood S L,Mierzwa C E. State of technology in autonomous underwater gliders[J]. Marine Technology Society Journal,2013,47(5):84-96.
[4] Alvarez A,Caffaz A,Caiti A,et al. Fòlaga:A low-cost autonomous underwater vehicle combining glider and AUV capabilities[J]. Ocean Engineering,2009,36(1):24-38.
[5] Triantafyllou M S,Triantafyllou G S. An efficient swimming machine[J]. Scientific American,1995,272(3):64-70.
[6] Breder C M. The locomotion of fishes[J]. Zoological. 1926,4:159-291.
[7] Chhabra A N K. Maneuvering and stability performance of a robotic tuna[J]. Integrative & Comparative Biology,2002,42(1):118-126.
[8] 梁建宏,郑卫丰,文 力,等. 两关节仿生水下航行器SPC-Ⅲ的推进与机动性[J]. 机器人,2010,32(6):726-731,740.
Liang Jianhong,Zheng Weifeng,Wen Li,et al. Propulsion and maneuverability of two-joint bionic underwater vehicle SPC-Ⅲ[J]. Robot,2010,32(6):726-731,740(in Chinese).
[9] Nakashima M,Tokuo K,Ono K. Experimental study of a two-joint dolphinlike propulsion mechanism[J]. Transactions of the Japan Society of Mechanical Engineers Part B,2000,66(643):703-709.
[10] Zhou C,Low K H. Better endurance and load capacity:An improved design of manta ray robot(RoMan-II)[J]. Journal of Bionic Engineering,2010,7(Suppl):137-144.
[11] Zhou C,Low K H. Design and locomotion control of a biomimetic underwater vehicle with fin propulsion[J]. IEEE/ASME Transactions on Mechatronics,2012,17(1):25-35.
[12] 田伟程. 多鳍水下仿生机器人的结构设计与运动控制[D]. 北京:北京航空航天大学,2012.
Tian Weicheng. Structure Design and Motion Control of Multi-Fin Underwater Bionic Robot[D]. Beijing:Beijing University of Aeronautics and Astronautics,2012(in Chinese).
[13] Fish F E,Innes S,Ronald K. Kinematics and estimated thrust production of swimming harp and ringed seals[J]. Journal of Experimental Biology,1988(137):157-173.
[14] Davis R W. Marine Mammals[M]. New York:Academic Press,2019.
[15] Berta A,Sumach J L,Kovacs K M. Marine mammals:Evolutionary biology(2nd edition)[J]. Polar Research,2007,45(1):88.
[16] Gordon K R. Locomotor behaviour of the walrus(odobenus)[J]. Journal of Zoology,2010,195(3):349-367.
[17] Howell L L. Compliant Mechanisms[M]. New York:John Wiley & Sons,2001.
[18] 余跃庆,李清清. 一种新型柔性铰链的设计、制作与试验研究[J]. 机械工程学报,2018,54(13):79-85.
Yu Yueqing,Li Qingqing. Design,manufacture and experimental research of a new type of flexible hinge[J]. Chinese Journal of Mechanical Engineering,2018,54(13):79-85(in Chinese).
Design and Kinematics Analysis of a Wire-Driven Propulsion Mechanism Inspired by the Seal Aft Fin
Liu Yuhong,Liu Shuhe,Deng Shihan,Li Houcun,Feng Dengxue
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
Bionic propulsions have attracted much attention due to their advantages of fast speed,high efficiency,good maneuverability,and low noise pollution. Based on the research on the biological structure and movement characteristics of the seal aft fin,a swing propulsion mechanism is proposed and designed based on the wire-drivenprinciple and a flexible hinge mechanism. The mechanism includes a spine frame unit,a pelvis unit,a tibia unit and a flexible seal aft fin unit. The joints adopt flexible hinges,and with the symmetrical arrangement of elastic elements on both sides,the bionic propulsion mechanism can be driven by a single steering gear to realize periodic swing. The D-H parameter method was used to conduct the kinematics analysis for the bio-inspired propulsion mechanism,and the coordinates of the seal aft fin endpoint in the absolute coordinate system were determined. The effect of the swing angle parameters(swing angle,swing amplitude and initial angle)of the equivalent connecting rod of the bionic propulsion mechanism on the swing amplitude of the propulsion mechanism is studied. According to the results,the swing angles of the equivalent connecting rods were optimized by the sequential quadratic programming method,and the best motion parameters consistent with the swing amplitude of the seal aft fin were obtained. At the same swimming speed as the seal,the swing trajectory of the seal aft fin unit basically matches that of the biological seal,which verifies the correctness of the optimization analysis. The swing experiment of the prototype is carried out in the air. The swing trajectory of the experimental prototype is obtained through the motion sequence diagrams continuously taken by the camera,which is compared with the optimized theoretical trajectory. The correctness of the design and analysis of the bio-inspired propulsion mechanism inspired by the seal aft fin was further verified.
propulsion mechanism inspired by the seal aft fin;wire-driven;flexible hinge;kinematics analysis;D-H parameter method
10.11784/tdxbz202009012
TH113.2
A
0493-2137(2022)02-0133-10
2020-09-04;
2020-12-28.
刘玉红(1971— ),女,博士,教授.Email:m_bigm@tju.edu.cn
刘玉红,yuhong_liu@tju.edu.cn.
国家自然科学基金资助项目(51675372,51721003);天津市自然科学基金资助项目(18JCTPJC49100).
the National Natural Science Foundation of China(No. 51675372,No. 51721003),the Natural Science Foundation of Tianjin,China(No. 18JCTPJC49100).
(责任编辑:王晓燕)
猜你喜欢
学生导报·东方少年(2020年1期)2020-05-06
小学科学(2020年11期)2020-03-04
红领巾·探索(2019年6期)2019-08-01
学生导报·东方少年(2019年28期)2019-01-17
幸福·健康版(2018年4期)2018-04-20
红蜻蜓(2017年11期)2018-03-09
家庭百事通·健康一点通(2017年11期)2017-11-29
家庭百事通·健康一点通(2017年5期)2017-05-19