软体机器人研究现状及展望
2022-11-02 05:40冯显英
现代制造技术与装备 2022年9期
董 效 冯显英
(1.山东大学 机电信息与工程学院,威海 264209;2.山东大学 机械工程学院,济南 250061)
随着人们生活水平的不断提高,机器人学和自动控制技术不断发展,使得机器人技术开始广泛应用于工业制造、医疗救助、科研和救灾抢险等各个方面。近年来,随着仿生技术的发展和新型复合材料的兴起,软体机器人快速发展,并逐渐应用于各个领域。新型复合材料的优势是可以以3D打印的方式来制作,节约了时间,降低了成本。软体机器人凭借在机体上的优势,可以适用于各种复杂环境,如医疗、军事及探测领域,且受到外界冲击后不会产生大的伤害。基于软体机器人技术,机器人的应用领域不断拓展。
1 研究现状
目前的软体机器人主要由新型智能复合材料构成,依靠自身结构柔软、韧性高、形变大的特点实现运动,理论上具有无限多自由度[1]。加州大学圣地亚哥分校的CHRISTIANSON教授依据章鱼的运动方式,设计了一种通过形状改变实现循环喷进的头足类软体机器人,如图1(a)所示[2]。通过改变机器人的内部体积和横截面积,利用喷射推进和附加质量效应,实现可重复喷射推进。来自中国科学技术大学的FAN等人依据青蛙跳跃的运动方式,设计了一种关节采用气动铰接式软驱动器的蛙式游泳软驱动器,如 图1(b)所示[3]。通过对蛙类生物结构和肢体运动特性的研究,在运动学模型的基础上建立了机器人肢体运动原理图,并通过组合控制系统确定了设计方案,从而实现了蛙式游泳机器人的小型化,有效减小了水下软体机器人的质量和体积,使其在水下环境的多重障碍物之间也能自由穿梭。软体机器人的研究不仅可以应用于海洋探索和环境监测,还可以应用于医疗领域。上海交通大学的邓韬等人设计了用于心脏微创手术的软体机器人,如图1(c)所示[4]。该机器人的设计灵感源于大象鼻子的生理结构,材料选用了无毒无污染的医用硅胶材料,可安全融入病人的身体。
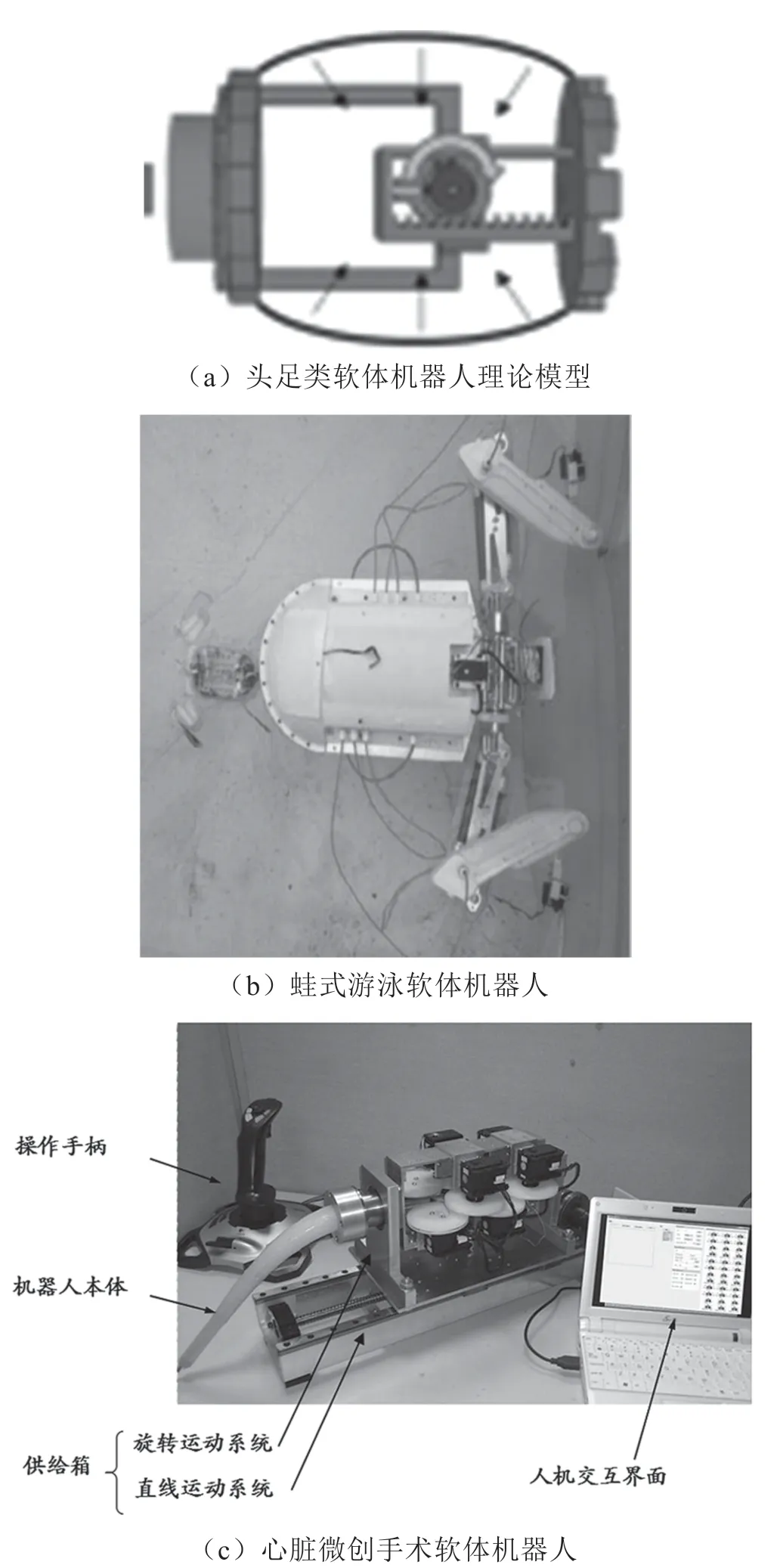
图1 不同类型的软体机器人
2 驱动方式
虽然软体机器人具有无限自由度[1],应用十分灵活,可以更好地适应各种环境,但是所能配备的驱动器数目十分有限,被称为驱动机器人。
2.1 气动驱动
气动软体机器人是指在机器人的软体结构中充气,利用气压使结构产生形变推动软体机器人运动。MARCHESE等人受到鱼运动时摆尾的启发,借助LAUDER等人研究的柔性箔[5-6],发明了一种利用气体弹性驱动器摆动的软体机器鱼[7],如图2所示。他们在软体鱼尾的两侧设置了两条气体通道,当将CO2通入这两条气体通道时,通道会发生膨胀,从而使鱼尾发生弯曲,实现机器人在水中的游动。
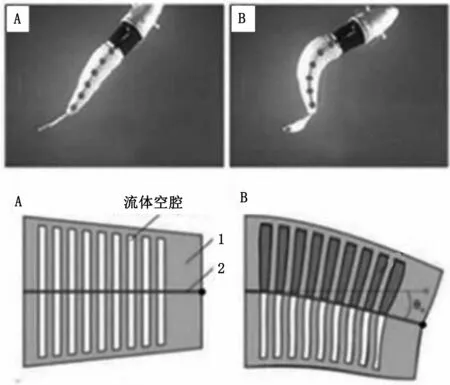
图2 气动驱动的软体机器鱼
2.2 液压驱动
液压驱动是通过在柔韧性极好的软体机器人中增添流体通道或在特殊位置添加具有限制作用的限制层材料[8],通过控制变形实现软体机器人的跳跃、爬行以及翻转等基本运动。KATZSCHMANN等人在气压驱动的软体机器鱼的基础上研究了一种液体循环驱动的软体机器鱼[9],如图3所示。该机器鱼设计了特殊的闭环液体流通渠道,通过齿轮装置操控水在两个驱动通道内的循环流动,为鱼的推进和转向运动提供 动力。

图3 液压驱动的材料与软体机器鱼
2.3 SMA驱动
形状记忆合金(Shape Memory Alloy,SMA)是一种利用热弹性的智能合金材料。马氏体相变和逆变,加热时可以恢复原始形状,因此具有形状记忆效应。形状记忆合金的相变由两种相构成,即奥氏体相和马氏体相。上海交通大学的王绪等人设计的仿尺蠖蠕动模块化软体机器人正是一种新型SMA驱动的软体机器人[10]。如图4所示,他们设计的软体机器人的结构由4个球状模块和前后腹足组成。模块1和模块4分别为头和尾巴,模块3和模块4充当躯干部分。通过球型模块膨胀收缩带来的形变,配合软体腹足的吸附和脱离,实现了该软体机器人在环境中的运动。
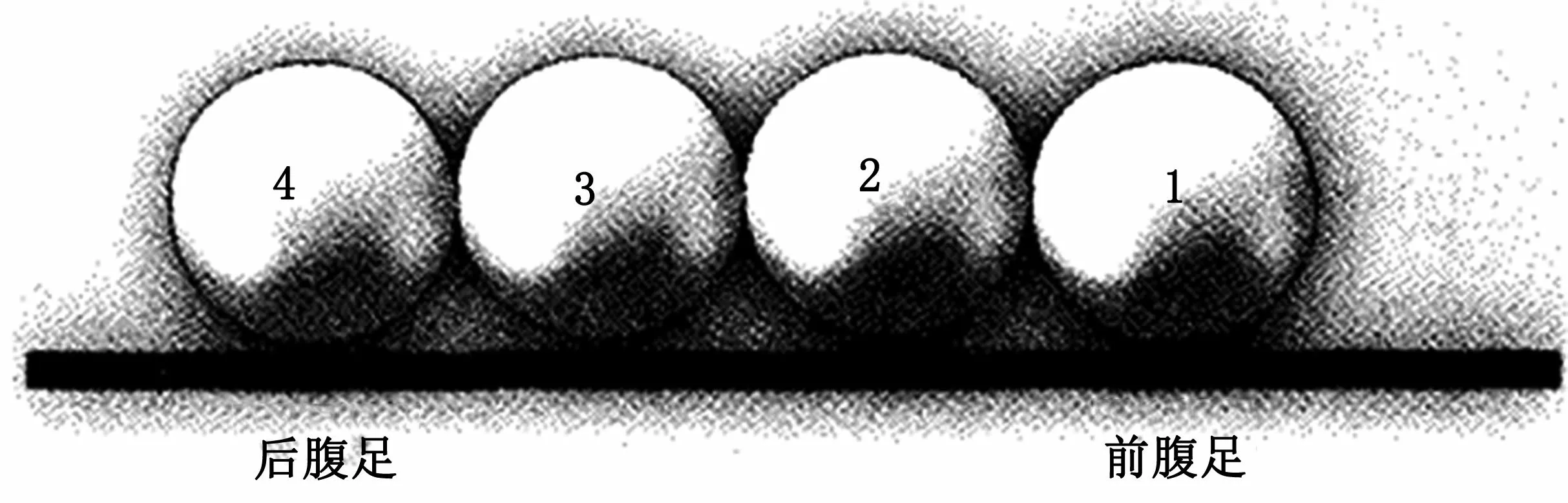
图4 仿尺蠖蠕动模块化软体机器人
2.4 EAP驱动
电活性聚合物(Electro-Active Polymer,EAP) 是近年发展迅速的柔性复合材料。它可以在外加电场的作用下,通过改变材料内部结构产生膨胀、收紧、弯曲等各种力学形变。它一般分为电子型EAP和离子型EAP两大类[11]。电子型EAP的驱动需要高达kV的电压,而离子型EAP在较低电压的刺激下即可发生力学变形[12]。美国麻省理工学院的DUBOWSKY教授设计的EPA驱动的弹跳机器人[13],采用介电型EAP驱动,大大减少每次弹跳消耗的能源,且质量仅有30 g,具有体积小、质量轻的优点。目前,机器人的弹跳高度约为10 cm,希望未来可以应用于火星探测。
2.5 磁流变材料驱动
磁流变材料是一种新发明的智能复合材料[14]。它的弹性模量可随外加磁场强度的变化而变化,进而实现收缩、膨胀以及弯曲等运动。NISHIDA等人利用最新的磁流变液材料设计了—种新型机器人抓手[15],如图5所示。通电电磁铁产生磁场,利用磁性粒子产生的极化效应和磁场作用,改变机器人抓手的弹性模量进行伸长与收缩实现夹取。

图5 磁流变材料与其构成的机器人抓手
2.6 其他驱动
山东大学冯显英等人设计了一种丝驱动连续体机械臂[16],如图6所示。这种高灵活性和安全性的机械臂可以解决传统离散机械臂无法适用于狭窄拥挤的体内环境的问题,拓宽了机械臂的适应范围。上面介绍的驱动方式都是物理驱动,本质是通过外力改变材料的物理性能,实现伸缩、弯曲等变形完成运动。化学反应驱动是指通过化学反应产生的驱动,即利用化学反应产生的巨大能量实现机器人的运动。Octobot是由美国哈佛大学WEHNER等人研发的能自动运动的软体机器人,通过在孔道注入过氧化氢溶液,配合机器人体内的铂催化剂发生化学反应释放大量气体,使通道膨胀发生变形,从而驱动机器人实现运动[17]。此外,该团队使用同样的驱动方式研制了一种弹跳机器人[18],采用C4H10和O2反应产生的大量热量进行爆破驱动。
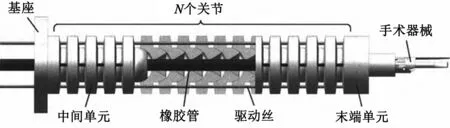
图6 连续体机械臂设计
3 关键问题与突破点
表1总结了软体机器人的关键问题,主要包括能源高效利用、控制动作精度以及运动学实际建模等。软体机器人在理论上存在无限的自由度,但是自由度与驱动器之间并不是简单的一对一线性关系,因此难以实现精确建模,且控制精度较低。此外,软体机器人目前急需研发污染小、能耗低、韧性高甚至可多次回收利用的智能软材料。研究开发面向软体机器人的传感器控制装置对推动软体机器人的发展起到了重要作用,有利于实现人机交互技术。
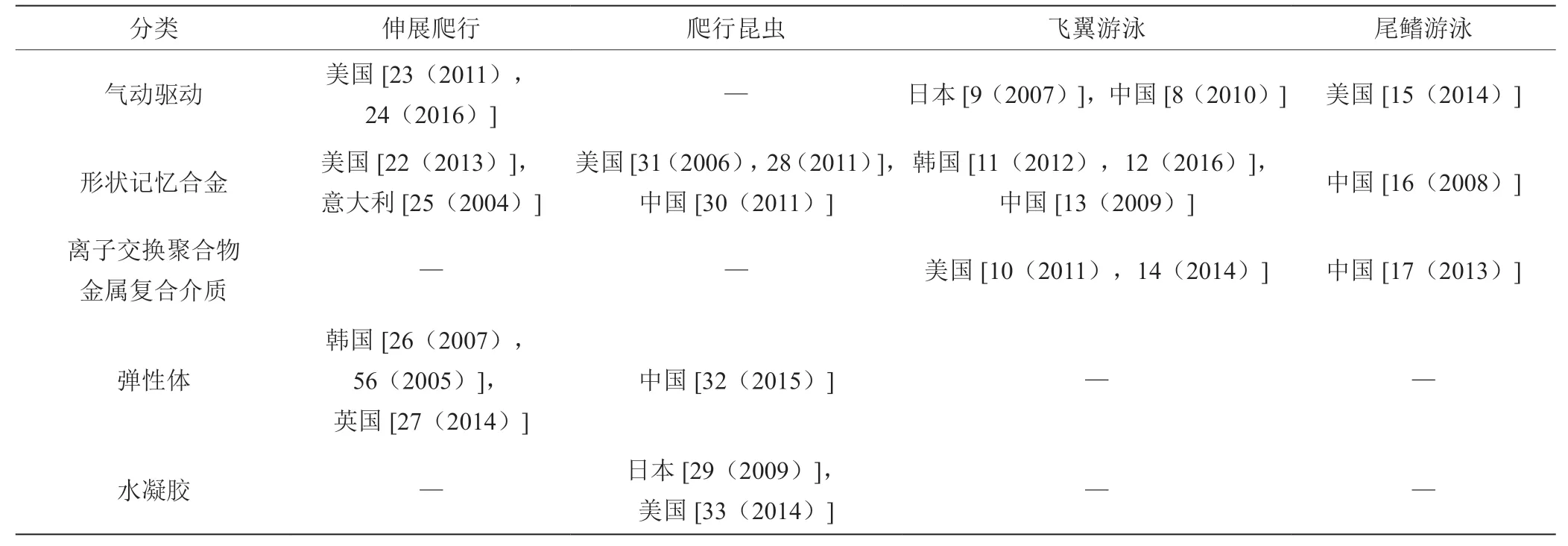
表1 器人的关键问题
本文对未来软体机器人的突破点提出了4点建议。第一,研究新型智能材料。目前,用于软体机器人的无毒无污染的软体材料极为短缺,导致软体机器人难以广泛应用于实践和实验研究。因此,科学家必须研究制造新的活性材料为软体机器人的应用提供多方面选择。第二,优化建模技术。由于软体机器人的自由度与驱动器并不是简单的一对一关系,难以保证软体机器人物理模型的精确度。因此,建模时需要考虑多耦合问题,在确保精度的基础上进一步优化设计。第三,优化传感器控制技术。多自由度的软体机器人实际上并不可以直接观察或者控制,并且目前软体机器人的控制方法只是简化的模型,不能保证理论上无限自由度的控制,因此必须优化软体机器人的传感器及其控制技术。第四,优化人机交互技术。在未来的研究中需要将更多精力集中在软体机器人的输入和反馈设备的硬件和软件设计上,从而更好地实现人机交互技术,便于人们进行 控制。
4 总结与未来展望
目前,软体机器人的研究正处于起步阶段,以生物模仿和实验为主。虽然短期内无法大规模应用软体机器人,但是已经出现许多仿生动物的软体机器人。软体机器人不仅可以用于探索未知环境、监控环境变化、抓取物品,还可以应用于医疗手术、探索外太空等。但是,现在发展软体机器人所需的智能材料比较短缺,人们需要在实验的基础上进一步优化建模技术和传感器控制技术,加强控制精度,实现人机交互。目前,软体机器人相较传统刚性机器人,最大的优势在于韧性好、体积小,可以适应非结构化的复杂环境。未来软体机器人将在重灾区探险救、医疗手术与人体骨骼补充甚至外太空探索等方面为人们提供极大助力,成为人们日常生活中不可或缺的一部分。
猜你喜欢
陕西科技大学学报(2022年5期)2022-10-13
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
上海交通大学学报(2021年10期)2021-11-05
北华大学学报(自然科学版)(2021年3期)2021-07-13
上海交通大学学报(2021年2期)2021-03-02
房地产导刊(2020年11期)2020-12-28
军事文摘(2020年24期)2020-11-29
电脑爱好者(2020年6期)2020-05-26
当代陕西(2019年8期)2019-05-09